Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2018 (C)
Was die technologischen Entwicklungen anbelangt, so beginne ich mit
der Software, um
anschließend die neue Hardware zu präsentieren, die
es in diesem Jahr in die Öffentlichkeit geschafft hat.
Gleich Anfang Januar wird berichtet, daß das Deutsche Zentrum
für Luft- und Raumfahrt (DLR) ein Konzept mit dem Titel ‚Blueprint
Concept for Urban Airspace Integration‘ entwickelt habe, das weltweit
erstmals unbemannte Fluggeräte aller Klassen mit konventionellen Flugzeugen
und Hubschraubern in sensibelen urbanen Lufträumen und darüber hinaus
im unkontrollierten Luftraum bis 762 m Höhe zusammenbringt.
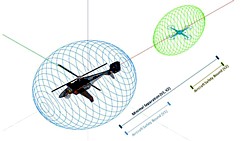
Die flexible Zuordnung technischer und fliegerischer Eigenschaften funktioniert in dem Konzept über virtuelle mehrdimensionale Polygone, anhand derer jedes Luftfahrzeug individuell dargestellt wird. Je größer das Fluggerät und je schlechter die technische Ausrüstung in Bezug auf Navigation, Kommunikation und die Fähigkeit, andere Luftraumnutzer zu erfassen, umso größer fällt das Polygon aus, je besser die Gesamtleistung ist, desto kleiner.
Fluggeräten eine risikominimierte Flugbahn zuzuweisen, soll im zukünftigen bodennahen Luftraum (U-Space) über einen zentralen U-Space-Service geschehen. Das neue DLR-Konzept ist ein Auftakt zu weiteren Forschungsarbeiten, wie das ebenfalls Anfang des Jahres gestartete DLR-Forschungsprojekt City-ATM, in dem fünf DLR-Institute ihre Expertise zur Integration unbemannter Fluggeräte in den Luftraum bündeln und das neue Konzept in den nächsten drei Jahren beispielhaft umsetzen und mittels Flugversuchen erproben werden.
Im Projekt City-ATM (Air Traffic Management), zu dessen Partnern auch die Deutsche Flugsicherung (DFS), das Zentrum für angewandte Luftfahrtforschung, die Gesellschaft für Luftverkehrsinformatik sowie die Firmen NXP e, FlyNex, Kopterkraft und Auterion zählen, arbeiten die Exoerten konkret an Pendants zu Ampeln, Vorfahrts- und Stoppschildern im urbanen, weitgehend unkontrollierten Luftraum bis zu 760 m über Grund.

(Montage)
Ende April 2019 wird ein Experiment an der Köhlbrandbrücke in Hamburg unternommen, bei dem gezeigt werden kann, wie die Kooperation und Kommunikation von Drohnen im komplexen Umfeld einer vielbefahrenen städtischen Verkehrsader auch über Wasser schon heute funktioniert. So wird erfolgreich die Erkennung feiner Risse an der Brücke demonstriert, währenddessen der Schiffs- und Straßenverkehr normal weiter läuft.
Im Herbst wird am Nationalen Erprobungszentrum für unbemannte Luftfahrtsysteme in Cochstedt (s.u. 2021) erstmals getestet, ob und wie sich mehrere Drohnen in plötzlichen Gefahren sicher handhaben lassen. Dabei simulierten die Forscher mit Rauchbomben ein Feuer, dessen Schwaden von einer speziellen DLR-Drohne entdeckt werden – woraufhin der Operator eine Flugverbotszone um das ‚Feuer‘ herum erstellt und diese Information auf einen zentralen Server von FlyNex hochlädt.
Anschließend pflegen die Mitarbeiter der angeschlossenen Bodenstation die rote Zone in die interne Datenbank ein, in die auch der lokale Flugverkehr von der DFS eingespeist wird. In der nächsten größeren Aktion sollen einige physikalische Drohnen in einem unübersichtlichen, größtenteils virtuellen Verkehrsszenario mit etwa 100 weiteren unbemannten Flugsystemen bewegt werden. Dies scheint im Dezember 2020 zu erfolgen.
Die Forschungsarbeiten sind Teil im übrigen der europaweiten Planung eines zukünftigen Luftraums, dem sogenannten SESAR U-Space, in dem konventionelle und unbemannte Fluggeräte nebeneinander operieren.
Einem Bericht vom Februar 2022 zufolge haben die Wissenschaftler zwischenzeitlich ein weltweit einzigartiges 4D-Führungssystem entwickelt, das es einer damit ausgestatteten Drohne erlaubt, einer Flugbahn präzise in den drei räumlichen Dimensionen und – als vierte Dimension – zeitlich zu folgen. Im Notfall kann ein solches Objekt aber seine eigene Flugbahn auch selbständig berechnen und im Bedarfsfall umplanen.
Für die entsprechenden Versuche, die trotz widriger Wetterbedingungen im Dezember des Vorjahres am Nationalen Erprobungszentrum in Cochstedt erfolgten, war ein experimenteller Multicopter namens DexHawk mit den neuen Funktionen ausgestattet worden, die den bordautonomen Flug im ‚dichten Verkehr‘ ermöglichen. Um dabei ein möglichst dichtes Verkehrsszenario zu simulieren, hatten die die Wissenschaftler die realen vor Ort verfügbaren Drohnen um virtuell ergänzt.
Es erweist sich, daß Flugszenarien möglich sind, bei denen in einem Quadratkilometer auf gleicher Höhe bis zu 85 Drohnen gleichzeitig sicher operieren können. Zudem wird mit einer weiteren Experimentaldrohne ein neues Betriebskonzept demonstriert, um Flüge außerhalb der Sichtweite des Piloten unter den 2021 neu eingeführten rechtlichen Regeln zu ermöglichen. Damit wird das Projekt erfolgreich abgeschlossen.
Ende Januar 2018 folgt die Meldung, daß Forscher der Universität
Zürich (UZH)
und des schweizerischen Forschungskompetenzzentrums NCCR-Robotics einen Algorithmus entwickelt
haben, der es Drohnen ermöglicht, auf bekannte und unbekannte Situationen
so zu reagieren, daß sie sicher im Großstadtdschungel navigieren können.
Die mit einer Kamera ausgestattete Drohne bewegt sich dabei wie ein herkömmlicher Verkehrsteilnehmer auf Straßen oder Fahrradwegen. Über ein Training lernt der DroNet getaufte Deep-Neural-Network-Algorithmus bekannte Verkehrsregeln und -situationen und kann danach autonom auf den Straßenverkehr reagieren sowie Zusammenstöße mit anderen Verkehrsteilnehmern und Gebäuden verhindern.
Wie flexibel der Algorithmus in unbekannten Umgebungen ist, wird in einem Experiment nachgewiesen, bei dem die Forschungsdrohne ohne weiteres Training in einem Parkhaus und einem Bürogebäude eingesetzt wird – und sich dort auf Anhieb zurecht findet, Hindernissen ausweicht und Fluren folgt. Als Einsatzgebiete solcher Drohnen sehen die Forscher Paketlieferungen für den Online-Handel, Überwachungsaufgaben und Rettungseinsätze in Innenstädten.
Um leichte und preisgünstige Drohnen sicher für den innerstädtischen Flugbetrieb zu machen, müßten den Forscher zufolge aber noch eine Reihe technischer Probleme gelöst werden – was etwas verwundert, denn das hier angestrebte kann die o.e. Drohne Skydio schön längst, wenn auch mit deutlich höherem technischen Aufwand.
Im März 2018 berichten die Fachblogs, daß Amazon, Boeing, GE und Google während
des jüngsten FAA-Symposiums in Baltimore bekanntgegeben haben, daß sie
bereit sind, mit der Entwicklung eines Managementsystems für
unbemannten Verkehr (Unmanned
Traffic Management, UTM) für Drohnen zu beginnen. Das System wird es
Drohnenschwärmen ermöglichen, einige 100 m über dem Boden zu fliegen,
wobei Mobilfunk- und Web-Anwendungen zur Vermeidung von Kollisionen und
zur Fernüberwachung eingesetzt werden.
Das neue Drohnen-UTM soll getrennt von den bestehenden bodengestützten Radargeräten der FAA und den menschlichen Fluglotsen entwickelt werden, muß aber in der Lage sein, mit diesen zu interagieren. Darüber hinaus soll das System den Strafverfolgungsbehörden Informationen zur Verfügung stellen, um Drohnen von ahnungslosen, unvorsichtigen oder kriminellen Drohnenpiloten zu identifizieren und zu verfolgen. Die Tests in Zusammenarbeit mit der NASA werden in den nächsten drei Monaten an verschiedenen Standorten in den USA beginnen. Dabei wird das UTM-Projekt vollständig von den Unternehmen finanziert, um die Entwicklungszeit zu beschleunigen.
Bereits im Mai melden die NASA und Amazon, daß sie auch mit Experten in Frankreich zusammenarbeiten, um herauszufinden wie der Drohnenverkehr koordiniert werden kann – mit dem Ziel, die Rolle des Landes als Drehscheibe für die sich entwickelnde Regulierung unbemannter Flugzeuge zu stärken. Frankreich ist eines der ersten Länder, das schon 2012 den kommerziellen Drohneneinsatz regulierte, was das Wachstum lokaler Start-ups anregte und Know-how hervorbrachte, das die NASA nun nutzt.
Dabei kooperiert diese mit dem Flugzeughersteller Airbus SE in Toulouse und dem Drohnenkonstrukteur Delair-Tech, der aufgefordert wird, Prototypen von Flugverkehrsmanagement-Software zu testen.
Laut Meldungen vom Februar 2019 geht das Drohnen-Verkehrsleitsystem der NASA nun in die letzte Testphase, in welcher die Drohnen ihre bisher komplexesten Demonstrationen absolvieren werden. Durchgeführt wird diese Testphase an der Texas A&M University (TAMU) und am Nevada Institute for Autonomous Systems in Las Vegas. Mit Unterstützung der Stadt Reno und der Stadt Corpus Christi werden dabei Flugtests in echten städtischen Umgebungen stattfinden – zwischen März und Juni in Reno, sowie im Juli und August an der TAMU.
Das UTM soll dem aktuellen Stand nach Luftkorridore für unbemannte Fluggeräte unterhalb der Höhe von 152 m (500 Fuß) reservieren, auf welcher der allgemeine Luftverkehr beginnt.
An dieser Stelle sei darauf hingewiesen, daß die DFS Deutsche
Flugsicherung GmbH und die Deutsche Telekom AG im
Mai 2019 ein Gemeinschaftsunternehmen namens Droniq
GmbH mit Sitz in Frankfurt am Main gründen, um das „deutschlandweit
erste einsatzfähige“ UAS Traffic Management System (UTM)
in den Markt einzuführen und Drohnen sicher und effizient auch außerhalb
der Sichtweite des Piloten in den Luftraum zu integrieren.
Das von den Partnern entwickelte System verarbeitet die Positionsdaten der Drohnen und stellt sie zusammen mit den Ortungsdaten der bemannten Luftfahrt zur Verfügung, wodurch ein komplettes Luftlagebild entsteht. Die notwendige Hardware besteht neben einem GPS-System aus einem speziellen Modem mit integrierter SIM-Karte. Dieses sogenannte Hook-on-device (HOD) übermittelt die Position der Drohne sowie deren Kennung über das Mobilfunknetz an das UTM.
Daneben bietet dieses noch weitere Funktionen zum sicheren Betrieb von Drohnen, wie die Möglichkeiten zur Registrierung, zur Missionsplanung oder für automatisierte Aufstiegsgenehmigungen. Außerdem soll das UTM später auch Lufttaxis steuern. Zunächst wird sich Droniq auf den deutschen Markt konzentrieren, danach ist eine schrittweise Expansion ins europäische Ausland geplant.
Im September unterschreiben die Droniq und das 2017 gegründete polnische Unternehmen Aerobits Sp. Z o.o. mit Sitz in Stettin, das auf die Miniaturisierung von Avionik spezialisiert ist, eine Absichtserklärung zur exklusiven Kooperation bei der Entwicklung von europäischen Standards für die Hardware, die für das Tracking von Drohnen über das UTM nötig sind.
Dabei ist zu erfahren, daß die neue Generation des HODs nun auch FLARM (Flight Alarm) und ADS-B (Automatic Dependent Surveillance – Broadcast) empfängt und diese Positionsdaten an das UTM weiter gibt. Diese Kollisionswarnsysteme werden von Segelfliegern, Motorflugzeugen oder Hubschraubern genutzt, die im unkontrollierten Luftraum nach Sichtflugregeln fliegen. So erhält der Drohnensteuerer immer ein genaues Bild über sämtliche Flugbewegungen im Nahbereich.
Nachdem mit dem neuartigem Verkehrsmanagementsystem über 50 erfolgreiche Streckenflüge mit einer Flugdistanz von insgesamt rund 2.350 km durchgeführt worden sind, bringt Droniq die erste voll operativ einsatzfähige Version im Mai 2020 in Deutschland auf den Markt. Die Firma bietet zudem mit der R+V Versicherung zusammen eine eigene Haftpflichtversicherung an, die speziell den Flugbetrieb außerhalb der Sichtweite (Beyond visual line of sight, BVLOS) abdeckt.
Zeitgleich im Mai 2019 informiert der chinesische Drohnenproduzent DJI,
daß er ab Januar 2020 alle Drohnen, die das Unternehmen
herstellt und die schwerer als 250 g sind, mit Sensoren ausstatten wird,
die Flugzeuge und Hubschrauber erkennen. Damit werden diese Drohnen in
der Lage sein, ADS-B-Signale (Automatic Dependent Surveillance-Broadcast)
zu empfangen, die Flugzeuge aussenden.
Die Technologie – die DJI AirSense nennt – ist in der Lage, Flugzeuge oder Hubschrauber zu erkennen und den Drohnenpiloten deren Positionen auf dem Bildschirm der Fernsteuerung anzuzeigen und sie zu warnen, wenn es den Anschein hat, daß eine Kollision möglich ist.

In der Hoffnung auf die Entwicklung kommerzieller Drohnenanwendungen
planen auch noch andere Unternehmen, Entwürfe und neue
BVLOS-Flugsoftware für
den Betrieb außerhalb der Sicht des Piloten (beyond visual line of
sight, BVLOS) bereitstellen zu können, wie im Mai 2018 gemeldet
wird. Fortschritte dabei haben in letzter Zeit insbesondere zwei Unternehmen
gemacht, die Windhover LLC und die PrecisionHawk.
Die Firma Windhover mit Sitz in League City, Texas, kann bereits einen erfolgreichen Test ihres integrierten ‚ecosystem flight software‘-Stacks und dessen Bodenkontrollsoftware bekannt geben, die im Rahmen des Small Business Innovation Research (SBIR)-Programms der NASA entwickelt wurden – und hofft nun, die neue Software an OEMs, Avionikhersteller und kommerzielle Kunden verkaufen zu können.
Die Firma PrecisionHawk wiederum hat Anfang des Monats einen im Netz abrufbaren Report veröffentlicht, der einen Entwurf für Unternehmen darstellt, die BVLOS-Flüge durchführen möchten ‚(Pathfinder Focus Area 2‘). PrecisionHawk war eines von drei Unternehmen, die 2015 als Mitglieder des Pathfinder-Programms der FAA benannt wurden, das Empfehlungen für verschiedene Aspekte der UAV-Umgebung geben sollte. Mehr über diesen Aspekt findet sich unter Regelungen (s.d.).
Die PrecisionHawk, die uns u.a. durch ihre Drohne zu Entnahme von Wasserproben aus dem Jahr 2015 bekannt ist, wurde beauftragt zu untersuchen, wie Drohnen-Flüge außerhalb der direkten Sicht des Piloten einen Einsatz für die Ernteüberwachung landwirtschaftlicher Betriebe ermöglichen könnten. Die dritte Pathfinder-Gesellschaft, die BNSF Railway, hat die Aufgabe, die Verwendung von UAVs zur Inspektion der Infrastruktur des Bahnsystems zu untersuchen. Sie gibt im Mai 2017 zusammen mit Rockwell Collins die erfolgreiche Demonstrationen des BVLOS-Betriebs mit Testflügen von mehr als 320 km bekannt.
Über ein Virtual-Reality-System namens Flight
Goggles, das autonome Drohnen trainieren kann, ohne die sonst
üblichen zahlreichen Abstürze in Verbindung mit der Entwicklung von Navigationsalgorithmen
zu verursachen, wird ebenfalls im Mai 2018 berichtet.
Das von einem MIT-Team unter der Leitung von Prof. Sertac Karaman entwickelte System läßt Drohnen durch einen großen, leeren Raum fliegen, der von Motion-Capture-Kameras verfolgt wird, welche die Orientierung der Drohne im dreidimensionalen Raum aufzeichnen. Gleichzeitig überträgt ein Computer, auf dem ein Bildwiedergabesystem läuft, ein interaktives Video aus erster Hand von einer mit Hindernissen gefüllten Umgebung an die Drohne, die das Video anstelle der Aufnahmen ihrer Bordkamera ‚sieht‘. Jedem virtuellen Hindernis wird eine physische Position im realen Raum zugewiesen.
Als Ergebnis versucht das Fluggerät, den computergenerierten Hindernissen auszuweichen, wobei die Motion-Capture-Kameras feststellen, ob dies auch tatsächlich gelingt. Falls aber nicht, stürzt es in der realen Welt jedoch nicht wirklich ab. Bei einem Test wird eine Drohne beispielsweise darauf trainiert, durch ein virtuelles Fenster zu fliegen, das etwa doppelt so groß ist wie die Drohne selbst. Im Verlauf dieses Trainings stimmt sich der Navigationsalgorithmus des Systems durch Ausprobieren selbst ab.
Die Drohne nutzt diesen Algorithmus anschließend, um durch ein tatsächliches Fenster zu fliegen, das die gleiche Größe und Position wie das virtuelle Fenster hat, ausschließlich geführt von ihrer Bordkamera. Sie schafft es 119 mal durch das Fenster und stürzt nur sechs mal ab bzw. benötigt weitere sechs mal Hilfe, was Teil des beabsichtigten kontinuierlichen Lernprozesses ist.

der DARPA
Im Juli 2018 meldet die DARPA den erfolgreichen
Abschluß der Flugtests der Phase 2 des Fast Lightweight Autonomy (FLA)
Programms, bei der in einer Attrappenstadt Drohnen und Algorithmen in
drei primären Szenarien – ohne menschliche Hilfe oder Kontrolle – getestet
wurden.
Die Idee hinter dem FLA-Programm ist die Entwicklung kleiner, erschwinglicher und manövrierfähiger Fluggeräte, die als ‚Teammitglieder‘ in Rettungs-, Militär- oder Gefahrenszenarien eingesetzt werden können. Aufbauend auf dem Erfolg der Flugtests der Phase 1 im Jahr 2016 verfeinerten die Forscher ihren Code und ihre Hardware im Bestreben nach größerer Leistung bei gleichzeitiger Verwendung noch kleinerer Quadcopter.
Bei den städtischen autonomen Flugszenarien im Freien und in Gebäuden werden erhebliche Fortschritte bei den drei Hauptherausforderungen gemacht. Dies sind das Fliegen mit erhöhter Geschwindigkeit – bis zu 72 km/h – zwischen mehrstöckigen Gebäuden und durch enge Gassen bei gleichzeitiger Identifizierung von Objekten von Interesse; durch ein schmales Fenster in ein Gebäude hinein und einen Flur entlang fliegen, Räume durchsuchen und 3D-Karten davon erstellen; sowie eine Treppe identifizieren und herunterfliegen und das Gebäude durch eine offene Tür verlassen.
Der nächste Schritt ist nun, noch mehr Rechenleistung auf kleinere Plattformen zu quetschen, um möglicherweise ein intelligentes UAV für Truppen oder Ersthelfer zu bauen, das klein genug ist, um in die Handfläche zu passen.

des HHI
Da die Kommunikation zur Steuerung und Ortung von Drohnen stabil, überall
verfügbar und auch außer Sichtweite funktionieren muß, entwickeln Wissenschaftler
des Fraunhofer-Instituts für Nachrichtentechnik, Heinrich-Hertz-Institut (HHI)
in Berlin eine sichere, einfache und sinnvolle Lösung: Sie rufen die
Drohne einfach an. Bisher werden Drohnen meist direkt per Funk gesteuert,
dessen begrenzte Reichweite die Einsatzmöglichkeiten jedoch deutlich
einschränkt.
Da das Senden und Empfangen von Informationen über Mobilfunkdatenkanäle verschiedene Schwächen aufweist, erlauben diese gegenwärtig keinen flächendeckenden, zuverlässigen kommerziellen Einsatz bei der Drohnensteuerung: Zum einen sind diese Kanäle nicht auf eine konstante Echtzeitverbindung, sondern für das kurzzeitige Übermitteln von Datenpaketen, z.B. beim Laden einer Website, ausgelegt, was zu Verbindungsabbrüchen führt. Und zum anderen ist gerade in Städten oder bei Großveranstaltungen die Überlastung ein Problem.
Die günstige, reichweitenunabhängige und prinzipiell sofort umsetzbare HHI-Lösung basiert hingegen auf einer Steuerung über die Sprachkanäle des Mobilfunknetzes, was den Vorteil hat, daß Sprachkanäle im Gegensatz zu Datenverbindungen nahezu überall verfügbar und äußerst zuverlässig sind. Darüber hinaus entstehen kaum zusätzliche Kosten, da weder eine neue Infrastruktur aufgebaut werden muß, noch spezielle Verträge für Datenverbindungen mit den Netzbetreibern geschlossen werden müssen. Alles was nötig ist, ist eine einfache Sprachverbindung, wie sie mit jeder Prepaidkarte bereitgestellt wird.
Um Drohnen zuverlässig steuern zu können, müssen einerseits Befehle an die Drohne übermittelt, andererseits Informationen wie Position, Höhe oder Akkuzustand an den Controller am Boden übermittelt werden. Hierzu werden die Befehle in Audiosignale umgewandelt, ähnlich wie früher bei Modems. Diese übersetzt ein kleines Modul auf der Drohne zurück in den Steuerbefehl.
Das Besondere der HHI-Lösung ist, daß sie nicht nur in Echtzeit funktioniert und äußerst robust gegenüber Ausfällen und Verbindungsabbrüchen ist, sie kann auch sofort angewandt werden, ohne neue Funkstandards, ohne neue Infrastruktur – und dies sogar weltweit, da die Übertragung über das normale Mobilfunknetz läuft und eine Verbindung zur Drohne an nahezu jedem Punkt der Erde möglich macht, quasi per Ferngespräch.
Ein weiterer Vorteil ist, daß die Technologie absolut zukunftssicher ist: Mobilfunkstandards kommen und gehen – für Sprachkanäle gilt dies nicht. Das Mobilfunknetz wird immer Sprachkanäle zur Verfügung stellen, und solange dies der Fall ist, ist das System eine zuverlässige und kostengünstige Alternative zu konventionellen Datenverbindungen.

der UC San Diego
Im September 2018 stellen Forscher der University of California San Diego (UC San Diego) um Prof. Massimo Vergassola Software-gesteuerte Robotgleiter vor, die buchstäblich wie Vögel fliegen können. Diese nutzen bekanntermaßen Thermikfahnen, die von heißen Stellen auf der Erdoberfläche aufsteigen.
Mit Hilfe einer Form von Maschinenintelligenz, die als Verstärkungslernen bezeichnet wird, lernten die Segelflugzeuge durch Erfahrung, wie man den Aufwind warmer Luft ausnutzt, um in Höhen von bis zu 700 m zu fliegen. Das aus der Verhaltenspsychologie abgeleitete Verstärkungslernen läßt das Subjekt durch Rückmeldung von Handlungen und anschließender Bewertung der Ergebnisse lernen. Dadurch kann der Segler seine eigene Leistung beurteilen und eine Navigationsstrategie entwickeln, um auf Änderungen der Windverhältnisse zu reagieren.
Bei den Tests, die in Zusammenarbeit mit dem Salk Institute for Biological Studies der UC San Diego und dem Abdus Salam International Center for Theoretical Physics in Triest, Italien, durchgeführt werden, verwenden die Wissenschaftler Segelflugzeuge mit 2 m Spannweite und einem Flugregler, um sie auf einen präzisen Neigungs- und Schräglagenwinkel einzustellen.
Nachdem der Bordcomputer über mehrere Tage hinweg die gemachten Erfahrungen aufzeichnet und die Programmierung die Navigationshinweise identifiziert, werden die Ergebnisse auf Segelflugzeuge mit unterschiedlichen Spannweiten ausgedehnt. Es zeigt sich, daß sie eine Navigationsstrategie liefern, die direkt auf die Entwicklung autonomer Segelflugzeuge anwendbar ist.

Das MIT wiederum zeigt im November Such- und Rettungsdrohnen,
die durch dichte Wälder fliegen können, ohne ein GPS zu
benutzen. Die Forscher des MIT haben hierfür gemeinsam mit Kollegen des
NASA-Forschungszentrums in Langley Quadrokopter-Drohnen so modifiziert,
daß eine Flotte von ihnen gemeinsam durch die Bäume eines dichten Waldes
schweben kann, indem die Drohnen während des Fluges drahtlos miteinander
sprechen.
Jede Drohne ist mit einem LiDAR ausgestattet, um detaillierte Karten des Gebietes zu erstellen. Als die Wissenschaftler feststellen, daß einzelne Bäume für die Drohnen, die dieses System nutzen, eine große Bedeutung haben, weisen sie die Flotte an, nach Baumgruppen zu suchen, einzigartige Muster zu registrieren und dann Algorithmen anzuzapfen, um festzustellen, ob ein Gebiet bereits durchsucht wurde. Andernfalls weist eine bordeigene Wegplanungssoftware die Drohne an, noch zu durchsuchende Gebiete anzusteuern.
Zur Überwachung durch menschliche Suchteams können die Kartierungsinformationen jeder Drohne mit Hilfe einer gleichzeitigen Lokalisierungs- und Kartierungssoftware an einer Bodenstation zusammengefügt werden. In dieser dreidimensionalen Karte werden die Bäume durch blaue und grüne Blöcke dargestellt, und unerforschte Zonen sind zunächst dunkel, werden aber während der Kartierung grau. Sowohl in Waldsimulationen als auch in einem Waldgebiet werden zahlreiche Drohnen getestet.
Um die Geschwindigkeit der Drohnen optimal auszunutzen, entwickelt das Team eine Suchstrategie, bei der die Flottenmitglieder in einem spiralförmigen Muster suchen. Probleme bereiten allerdings noch die praktischen Grenzen einer drahtlosen Kommunikation der Drohnen mit der Bodenstation.
Was Drohnen mit besonderen Hardware-Fähigkeiten anbelangt, so wird im
Februar 2018 über die Entwicklung einer amphibischen
Starrflügeldrohne namens EagleRay an der University
of North Carolina at Chapel Hill (UNC) berichtet, bei der
nach eigenen Angaben erstmals PV-Zellen zur Stromversorgung verwendet
werden.
In den letzten Jahren gab es bereits mehrere Flugdrohnen, die sanft auf der Oberfläche eines Sees landen oder sogar unter Wasser gehen konnten, um Inspektionen durchzuführen, Wasserproben zu nehmen oder Unterwasservideos zu drehen. Vorgestellt wurden die Drohnen QuadH2O und HexH2O (2014), die Splash Drone und ihre Nachfolger (2015), der AquaMav des Imperial College London bzw. der Loon Copter der Oakland University (beide 2016), sowie der Flying Fish der Johns Hopkins University oder das SUWAVE der Université de Sherbrooke (beide 2017), wobei letztere Drohne ebenfalls schon Solarzellen auf den Flügeln hatte.

Das EagleRay-Projekt der UNC begann im Jahr 2014, als ein Team von vier Professoren – Kara Peters, Ashok Gopalarathnam, Larry Silverberg und Matthew Bryant als Leiter – einen entsprechenden Forschungsauftrag von dem US-Industriekonzern Teledyne Technologies Inc. erhielt. Im Frühjahr 2016 kann bereits ein voll funktionsfähiger Prototyp vorgewiesen werden, und im September 2017 veröffentlicht das Team ein Papier über seine Arbeit (‚Testing and Characterization of a Fixed Wing Cross-Domain Unmanned Vehicle Operating in Aerial and Underwater Environments‘).
Im Gensatz zu einigen seiner Vorläufer faltet der EagleRay vor dem Eintauchen in das Wasser jedoch nicht die Flügel. So kann er sofort aus dem Wasser aufsteigen und an Höhe gewinnen. Mit einer Spannweite von 1,5 m, einer Länge von 1,4 m und einem Gewicht von 5,7 kg wird er dabei von einem einzelnen Propeller im Bug angetrieben, der so konstruiert ist, daß er sich sowohl in der Luft als auch im Wasser leicht bewegen kann.
Zusätzlich zu den Solarzellen, die die Lebensdauer der Batterie verlängern, während der EagleRay fliegt oder auf dem Wasser aufsetzt, sind an Bord der Drohne Sensoren und Sonare installiert, die es ihr ermöglichen, sich in unterschiedlichen Medien und im Gelände zurechtzufinden. Durch ihre Vielseitigkeit kann sie je nach Bedarf Wildtiere sowohl über als auch unter der Wasseroberfläche verfolgen und beobachten.
So könnte sie zum Beispiel eine sich schnell bewegende Delphinschule aus der Luft verfolgen, und dann, wenn die Delphine anhalten, um eine gute Futterstelle zu nutzen, tauchen und diese unter Wasser weiter überwachen. Setzen sich die Tiere wieder in Bewegung, kann auch sie den Flug wieder aufnehmen und weiter Beobachtungen aus der Luft machen.
Ebenso kann der EagleRay Unterwassersensoren schnell von Ort zu Ort bewegen. Hat man ein Ziel für das nur unter Wasser funktionierende Sonar, fliegt er hin, taucht unter, um die Sonar-Messung zu machen, und nimmt den Flug dann wieder auf, um an einem anderen Ort weitere Messungen zu machen. Um solche Sonardaten zu sammeln, muß ansonsten ein Flugzeug entsprechende Sonobojen abwerfen. Die Forscher arbeiten nun an der Skalierung des EagleRay nach oben und unten sowie an der Entwicklung eines Controllers, der einem Bediener ermöglicht, das Fluggerät sowohl in der Luft als auch unter Wasser einfach zu steuern.

Amphibious
In der Berichterstattung folgt im August 2018 die amphibische Starrflügeldrohne Aeromapper Talon Amphibious der Firma Aeromao Inc. mit Sitz in Ontario, Kanada, deren Wurzeln ins Jahr 2004 zurückreichen, als sie damit begonnen hat, UAVs für die Kartierung in rauhen Umgebungen zu entwerfen, zu bauen und zu betreiben. Im Gegensatz zu der EagleRay kann dieses Fluggerät, das eine weiterentwickelte Version der im Jahr 2014 eingeführten Aeromapper Talon ist, aber nicht tauchen.
Die wasserdichte Talon Amphibious besteht aus kohlefaserverstärktem EPO-Schaum (expandiertes Polyolefin), hat eine Flügelspannweite von 2 m, wiegt 3,5 kg, hat einen Steigwinkel von mehr als 45°, erreicht eine Reisegeschwindigkeit von 62 km/h und eine Höchstgeschwindigkeit von 110 km/h und kann mit einer Ladung ihres Akkupacks bis zu zwei Stunden lang in der Luft bleiben. Die Drohne kann dabei entweder autonom oder per Fernsteuerung fliegen, hat eine Kontrollreichweite von über 30 km und kehrt automatisch zu ihrem Startplatz zurück, wenn der Funkkontakt abreißt.

Koffer
Für Aufnahmen wird eine nach unten gerichtete Kamera verwendet, um 20-Megapixel-Fotos oder 4K-Videos zu machen. Auf Wunsch gibt es aber auch eine nach vorn gerichtete Kamera, die ferngesteuert geschwenkt werden kann, ebenso wie hochauflösende Infrarot-Sensoren. Das Echtzeit-Video wird über eine Entfernung von 15 – 20 km an den Benutzer übertragen – oder bis zu 40 km, wenn eine optionale Parabolantenne verwendet wird.
Während Starrflügel-Kartierungsdrohnen, nachdem sie in einem Gittermuster über ein bestimmtes Gebiet geflogen sind, normalerweise entweder eine traditionelle Landung auf dem Boden durchführen oder mit dem Fallschirm herunterkommen, wird die Talon Amphibious von Hand vom Ufer oder von einem Boot aus gestartet – und kann nach Abschluß ihre Beobachtungsaufgabe autonom eine Landung auf dem Wasser durchführen. Alternativ sind Fallschirmlandungen auf dem Festland möglich. Der Preis eines kompletten flugbereiten Aeromapper Talon Kartierungssystems inkl. Tragekoffer beträgt 9.980 $.
Später kommt mit dem Aeromapper Talon LITE eine ähnlich aussehende aber erschwinglichere Version auf den Markt, die zu einem Preis ab 5.590 $ erhältlich ist. Die Drohne kann dank eines neuen Hybrid-Batteriesystems bis zu drei Stunden fliegen und pro Flug bis zu 10 km2 völlig autonom abbilden. Auch diese Version ist modular mit austauschbaren Teilen aufgebaut.
Dem Stand von Anfang 2020 zufolge sind die gut ausgereiften und praxiserprobte Talon-Drohnen bisher an etwa 200 Kunden in mehr als 50 Länder ausgeliefert worden.

Der Prototyp einer weiteren schwimmfähigen Drohne wird im September 2019 erstmals
eingesetzt – im neuen Marker-Wadden-Naturgebiet in Holland. Der an der Technischen
Universität Delft (TU Delft) entwickelte Pelican –
der auf einer kommerziell erhältlichen Splash-Drohne basiert (s.o.) –
führt vor Ort autonom Wasseranalysen durch, um in den Gewässern beispielsweise
schädliche Mikroben wie toxische Cyanobakterien zu detektieren.
Der wasserdichte Quadrokopter hebt automatisch ab und fliegt über das Wasser, wobei er mit Hilfe einer bordeigenen Hyperspektralkamera nach Problemen wie Algenblüten sucht. Wird etwas entdeckt, landet die Drohne an dieser Stelle auf dem Wasser und schwimmt bei der Probenentnahme an der Oberfläche. Nach dem Rückflug landet sie autonom auf einem tragbaren CytoSense-Durchflußzytometer des niederländischen Startup-Unternehmens CytoBuoy.
Die Wasserproben werden dann in dieses Gerät eingebracht, wo sie innerhalb weniger Minuten gründlich auf Mikroorganismen gescannt werden. Anschließend werden die Daten auf einen Server hochgeladen, von dem aus sie über ein Online-Portal von Gemeinden oder anderen Gruppen abgerufen werden können.
Da Wasserproben derzeit häufig von Technikern entnommen werden, die mit Booten aufs Wasser fahren und die gesammelten Proben anschließend in ein Labor zurückbringen müssen, können sich diese während dieser Zeit zersetzen, was zu ungenauen Meßwerten führen kann. Im Gegensatz dazu kann die Kombination aus Drohne und Durchflußzytometrie die Wasserqualität selbständig und in Echtzeit zu überwachen – und dies zu beträchtlich geringeren Kosten.
Das zuständige Micro Air Vehicle Lab (MAVLab) der TU Delft hofft, daß die Drohne im weiteren Verlauf des Projekt auch unter die Oberfläche gehen und Proben aus verschiedenen Tiefen sammeln kann. Sie ist nicht zu verwechseln mit dem Forschungs-Quadrokopter Pelican der Firma Ascending Technologies GmbH, die in der Jahresübersicht 2010 präsentiert wird).
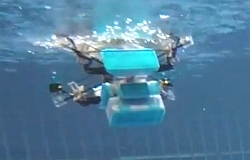
Eine weitere amphibische Drohne wird auf der Robotik-Konferenz ICRA im
Juni 2020 präsentiert. Der Prototyp von Yu Herng
Tan von der National University of Singapore und Ben
M. Chen von der Chinese University of Hong Kong sei
entstanden, weil die „bisher existierenden Konzepte für solche amphibischen
Drohnen unbefriedigend sind“. Sie würden sich vornehmlich an Flugrobotern
orientierten, die lediglich mit kleinen Ergänzungen für den Betrieb im
Wasser ausgestattet werden.
Die nun vorgestellte flug-, schwimm- und tauchfähige Drohne baut darauf auf, daß der Antrieb unterschiedlich ausgerichtet werden muß, je nachdem, ob sie sich über, auf oder unter der Wasseroberfläche bewegt. Daher können die Rotoren um bis zu 180° gedreht und damit den jeweiligen Erfordernissen angepaßt werden.
Im Unterschied zu anderen Konzepten, die stets die Drehung des gesamten Roboters erfordern, bleibt so die Ausrichtung anderer Komponenten wie etwa einer Kamera unverändert. Durch symmetrische Koppelung der Rotoren kann die Mechanik zudem einfach gehalten werden, so daß für deren Ausrichtung nur ein einziger Servomotor erforderlich ist. In einem veröffentlichten Video ist gut zu erkennen, wie die 505 g schwere und 25 cm durchmessende Drohne den Wechsel zwischen Flug-, Tauch- und Schwimmphase bewältigt und sich aus dem Wasser auch wieder in die Luft erhebt.

Ein besonderes Drohnenmodell mit nur einem einzelnen Doppelrotor,
wird im Februar 2018 auf der CES vorgestellt. Die Hintergrundgeschichte
der ringförmigen Cleo geht auf die kanadischen Ingenieure Omar
Eleryan und Simon Czarnota zurück. Als diese
zum ersten mal versuchten, eine normale Drohne zu fliegen, erschreckte
sie, wie groß, laut, schwer zu kontrollieren und potentiell gefährlich
diese war.
Die Erfahrung motivierte sie dazu, die Firma Cleo Robotics zu gründen und die donutförmige Cleo-Drohne zu entwickeln, die in eine Tasche paßt, von einer Smartphone-App gesteuert wird und mit einer HD-Videokamera ausgestattet ist. Die Flugzeit beträgt 12 – 15 Minuten pro Ladung. Einen Prototypen der handflächengroßen Drohne hatte das Unternehmen bereits auf der letztjährigen CES gezeigt.
Durch ihre spezielle Bauweise, bei der zwei Propeller in ihrem kanalisierten Körper gestapelt sind, sowie die oben und unten angebrachten Gitter, die die Finger der Benutzer vor den wirbelnden Propellern schützen, ist es möglich, daß man die Drohne während des Fluges einfach greifen kann. Mit 95 mm im Durchmesser, einer Dicke von 33 mm und einem Gewicht von nur 90 g ist sie auch kompakt genug dafür.
Die genaue Art und Weise, wie die elegante und sichere Drohne gesteuert wird, ist ein Geschäftsgeheimnis. Gesagt wird nur, daß in den Luftstrom Steuerflächen eingeführt werden, um dessen Richtung zu ändern und einen Schubvektor-Effekt zu erzeugen. Die Firma läßt sich das Geheimnis jedenfalls gut bezahlen: Die Cleo Dronut kostet Anfang 2020 den stolzen Betrag von 9.800 $.

Im November 2021 bringt die Cleo Robotics das Nachfolgemodell Dronut X1 in den Handel, das seine zwei übereinander gestapelten, gegenläufigen Rotoren ebenfalls sicher im Inneren ihres Gehäuses aus Verbundwerkstoff umschließt. Die Drohne ist für Anwendungen wie Inspektion und Aufklärung in beengten und/oder GPS-losen Umgebungen konzipiert, wird per Wi-Fi über eine Joystick-Fernbedienung und eine Android-App gesteuert, kann aber auch autonom seine Position halten und mit Hilfe eines eingebauten 3D-LiDAR-Sensors Hindernissen ausweichen.
Die Dronut X1 wiegt 425 g, ist 165 mm hoch und hat eine maximale Vorwärtsgeschwindigkeit von 4 m/s. Sie streamt Echtzeit-Videos an den Benutzer und nimmt auch 4K-Filmmaterial auf, wobei vier LED-Scheinwerfer für die Beleuchtung sorgen. Eine 40-minütige Ladung des Lithium-Wechselakkus reicht für eine Flugzeit von 12 Minuten. Preislich verändert sich jedoch nichts: Auch dieses Modell wird für 9.800 $ angeboten. In dem veröffentlichten Video ist allerdings zu hören, daß die Drohne extrem lauf ist.

Eine Drohne, die ebenfalls keine freiliegenden Rotorblätter besitzt,
wird im Juli in den Blogs vorgestellt. Sie fliegt trotzdem – verwendet
dafür aber Impeller. Solche Flügelräder oder Zentrifugalventilatoren,
wie sie auch in Laubbläsern und Haartrocknern zu finden sind, ziehen
die Luft von hinten an und drücken sie seitlich heraus, anstatt wie
ein normaler Ventilator nach vorne.
Die Impeller Drone des Designers Marcus Kung aus Hongkong – sein Master-Abschlussprojekt am Londoner Royal College of Art – besitzt vier Zentrifugalventilatoren, die wie die Räder eines Autos angeordnet sind. Die Luft wird von den Seiten angesaugt und dank des Gehäuses um den Ventilator, das den Luftstrom lenkt, nach unten gedrückt. Das Gehäuse schützt das Gebläselaufrad vor Berührungskontakten, während der Lufteinlaß durch ein Gitter geschützt wird.
Die Vorteile einer Impelleranordnung sind, daß die robuste Drohne viel sicherer vor Kollisionen mit Objekten und irreversiblen Schäden an wichtigen Komponenten ist. Das Impellergehäuse ermöglicht es außerdem, die Luft mit größerer Kraft durch den Auslaß herauszudrücken, so daß die Drohne mit geringerer Leistung höher fliegen kann. Ein zusätzlicher Vorteil der Impeller-Drohne ist, daß sie leiser ist als eine, die mit Rotorblättern arbeitet.
Vertikale Starttests zeigen, daß sich die Effizienz des Motors derzeit nicht mit der einer Standarddrohne vergleichen läßt, was Kung durch weitere Entwicklungen zu verbessern hofft. Ein erster Schritt zur Entlastung der vier Motoren der Drohne ist die Schaffung einer Leichtbaukonstruktion, in dem er mit Hilfe eines Strukturoptimierungsalgorithmus ein strukturstabiles Objekt mit der minimalen Materialmenge erzeugt hat.
Zur Erinnerung: Ein Konzeptentwurf für ein Fluggerät ohne Rotorblätter namens Bladeless Drone wurde bereits 2017 von dem mexikanischen Designer Edgar Herrera vorgestellt.

Ebenso ohne die traditionellen Propeller, dafür aber mit Laufrädern bzw.
ringförmigen Flügelrotoren, die in diesem Fall jedoch offen und in
der horizontalen Standardkonfiguration von Quadrokoptern angeordnet
sind, funktioniert die Whisper Drone des Elektroingenieur Derek
Schwartz, die ebenfalls im Juli in den Fachblogs zu sehen
ist.
Dieser startet eine Kickstarter-Kampagne um Geld für die weitere Entwicklung der Technologie zu sammeln, von der bereits ein funktionierender Prototyp existiert. Dieser ist derzeit zwar noch nicht so effizient wie ein normaler Quadrokopters, erzeugt im Gegensatz zu dem bekannten hochfrequenten Pfeifen aber eher eine Art zischendes Geräusch. Zudem soll sich mit jedem bislang hergestellten Prototyp die Schubkraft-Effizienz verbessert haben.

(Detail)
Laut Schwartz sind seine Rotoren aus Polyurethanschaum auch kollisionsbeständiger als traditionelle Propeller und lassen sich bei gleicher Festigkeit aus einer geringeren Materialmenge herstellen. Auch scheint die dicke Schicht beschleunigter Luft, die durch die hochstehenden Schaufeln verursacht wird, eine gewisse Isolierung gegen nach unten gerichtete Strömungen turbulenter Luft zu bieten.
Wie sich herausstellt, hat die Kickstarter-Gemeinde wenig Sinn für Wissenschaft - oder es der absolute Mangel an Design. Obwohl man den Prototyp im Flug sehen und hören kann, und trotz des Versprechens, eine Whisper Drone mit einer Fernsteuerungseinheit für 395 $ zu erhalten, wenn und falls das Finanzierungsziel von 40.000 $ erreicht wird, beteiligen sich nur sieben Unterstützer mit zusammen 2.231 $, weshalb die Finanzierung des Projekt Ende August abgebrochen wird.
Daß Schwartz seine Laufräder selbst erfunden haben soll, wie die Presse behauptet, stimmt natürlich nicht. Zum Beleg verweise ich auf die äußerst lange Geschichte dieser Technologie als Antriebsvariante, die sich aber nie hat richtig durchsetzen können.

von Festo
Neben Industrieprojekten wie etwa zur Mensch-Roboter-Kollaboration entwickelt
der Automationsspezialist Festo AG & Co. im Verbund
mit Hochschulen, Instituten und Entwicklerfirmen immer wieder neue bionische
Roboter, deren technische Grundprinzipien aus der Natur abgeleitet
sind.
Die Firma, die im Jahr 2011 mit dem SmartBird, 2013 mit dem BionicOpter, und 2014 mit den eMotion Spheres für Aufmerksamkeit gesorgt hatte, stellt auf der diesjährigen Hannover Messe einen Flughund-Roboter vor, der trotz 2,28 m Spannweite enge Radien fliegen kann. Möglich macht das seine ausgetüftelte Kinematik nach dem Scherenprinzip: Die Handschwinge klappt sich beim Aufschwung ein und breitet sich zum kraftvollen Abschwung wieder aus.

Damit sich der ultraleichte Bionic Flying Fox in einem definierten Luftraum teilautonom bewegen kann, kommuniziert er mit einem so genannten Motion-Tracking-System, das permanent seine Position erfaßt. Gleichzeitig plant das System die Flugbahnen und liefert die dazu nötigen Steuerbefehle. Für Start und Landung benötigt der Roboter allerdings die Hilfe eines Menschen.
Im Jahr 2020 folgt übrigens ein autonomer Robotervogel mit dem Namen BionicSwift, der von einer Schwalbe inspiriert als Blaupause für Luftverfolgungssysteme dienen soll. Dank der Biomimikry ist er ultraleicht und aerodynamisch, so daß er äußerst wendige und agile Bewegungen ausführen kann. Bei einer Länge von 44,5 cm und einer Flügelspannweite von 68 cm wiegt der BionicSwift gerade einmal 42 g.
Im Rahmen des Bildungskonzepts Bionics4Education bietet FESTO zudem verschiedene Lernbaukästen für bionisch inspirierte Roboter an – deren jüngster eben genau diesen neuen Robotervogel beinhaltet, der ab dem 4. Quartal 2021 zu einem bislang nicht genannten Preis erhältlich sein wird.
Ende Mai 2018 präsentieren Forscher des Étienne Jules
Marey Institut des Sciences du Mouvement an der Université d’Aix-Marseille in
Frankreich den Quad-Morphing Flugroboter, für den sie
sich von Vögeln haben inspirieren lassen. Die Weltneuheit ist ein Fluggerät,
das seine Form während des Fluges verändern kann.

Drohnen sind am stabilsten mit vier Propellern, die von oben betrachtet in einer quadratischen Konfiguration mit einem Propeller an jeder Ecke angeordnet sind. Ein solcher Aufbau macht es dem Fluggerät jedoch schwer, durch enge Räume zu passen. Hier kommt die neuentwickelte Quad-Morphing-Drohne ins Spiel.
Die Drohne ist mit zwei horizontalen Armen ausgestattet, die an den Enden ihrer beweglichen Querbalken jeweils einen nach oben gerichteten Propeller haben. Im normalen Flug sitzen diese Arme senkrecht zur Mittelachse des Fluggeräts und positionieren die vier Propeller in der traditionellen quadratischen – oder in diesem Fall eher rechteckigen – Anordnung.
Wenn sich die Drohne jedoch durch einen Spalt zwängen muß, dreht ein System aus flexiblen und starren Drähten die Arme so, daß sie ihre Ausrichtung ändern und nun parallel zur Mittelachse der Drohne sitzen. Damit werden die vier Propeller alle in einer Reihe angeordnet, wodurch sich die Spannweite halbiert. Obwohl diese Konfiguration weniger Stabilität und Kontrolle bietet, kann der Quadtokopter bei der Fahrt durch die Lücke mit einer Geschwindigkeit von 9 km/h vorwärts bewegt werden. Wenn er durch ist, drehen sich die Arme wieder nach außen.
In der aktuellen Indoor-Testanordnung wird die Armdrehung durch ein 3D-Lokalisierungssystem ausgelöst, das eine Anordnung von 17 stationären Kameras umfaßt, die die Drohne während ihres Fluges verfolgen. Der Kopter ist jedoch auch mit einer eingebauten Miniatur-Hochgeschwindigkeitskamera ausgestattet, die es ihm letztlich ermöglichen soll, die Spaltgrößen unabhängig zu beurteilen und seine Arme bei Bedarf selbständig zu drehen.
Die Entwicklung ebnet den Weg für eine neue Generation von großen Robotern, die in der Lage sind, durch enge Passagen zu navigieren und sich damit ideal für Explorations- und Rettungseinsätze eignen. Eine parallele Entwicklung findet übrigens schon seit längerem an der École polytechnique fédérale de Lausanne (EPFL) statt, sie wird in der Jahresübersicht 2017 beschrieben (s.d.).

Purdue University
Im April 2019 folgt ein Bericht über eine weitere Drohne mit beweglichen Armen, die an der Purdue University in Indiana unter der Leitung von Prof. Xiumin Diao entwickelt wird.
Inspiriert von der Tatsache, daß fliegende Insekten den Winkel ihrer Flügel je nach Situation anpassen können, konstruieren die Wissenschaftler eine Drohne, die ihre Arme während des Fluges verschränken kann, was eine bessere Leistung ermöglicht. So fliegt der Prototyp des Kopters zunächst einmal bei windigen Bedingungen besser als eine normale Drohne. Das liegt daran, daß er seine Arme automatisch bewegen kann, um seinen Schwerpunkt beizubehalten, da der Wind ihn sonst schräg zu stellen droht, wenn er von einer Seite getroffen wird.
Zudem kann er schwerere, asymmetrisch geformte Nutzlasten heben, was er seiner Fähigkeit verdankt, die unregelmäßige Gewichtsverteilung solcher Ladung auszugleichen, indem er seinen eigenen Schwerpunkt erneut anpaßt. Die klappbaren Arme sollen das Fluggerät auch energieeffizienter machen als andere, da sie angewinkelt werden können, um den verfügbaren Schub voll auszunutzen.
Und schließlich kann sich die Drohne durch enge Lücken zwängen, indem sie ihre Arme nach vorne und hinten klappt, wodurch sie dünner wird. Das Büro für Technologiekommerzialisierung der Universität hat die Technologie patentiert und arbeitet nun mit Diao zusammen, um Industriepartner zu finden, die an einer Lizenzierung interessiert sein könnten.
Ebenfalls
an der Purdue University entwickeln Xinyan
Deng und ihre Mitarbeiter einen Roboter mit einer Spannweite
von 17 cm, der wie ein Kolibri fliegt, indem er sich mit Schlagflügeln
in der Luft hält. Der Bericht darüber erscheint im Mai 2019.

Im Moment hängt der kleine Flieger zwar noch am Kabeln, die ihn mit Energie versorgen und Steuerbefehle an die Motoren übertragen. Doch er hat genügend Kraft, um mehr als das Doppelte seines Eigengewichts von 12 g zu heben, d.h. konkret 27 g, weshalb es kein großes Problem sein sollte, auch noch eine Batterie, eigene Sensoren und einen Bordcomputer unterzubringen.
Das Team am Bio-Robotics Lab der Universität konzentriert sich derzeit auf das Flugverhalten des Roboters, der nicht nur hinsichtlich der Größe seinem biologischen Vorbild nahekommt. Auch die Flugmanöver, die in dem veröffentlichten Video zu sehen sind, haben Kolibri-Qualitäten. Ähnlich wie der kleine Vogel kann der Hummingbird Robot sich an einer Stelle in der Luft halten, aber auch sehr rasch die Position wechseln.
Diese Manövrierfähigkeit wird erreicht, indem jeder Flügel durch einen eigenen Motor gesteuert wird. Diese entkoppelten Flügel, die mehr als dreißig mal pro Sekunde unabhängig voneinander die Richtung ändern können, ermöglichen es dem Roboter, die gleiche Schlagdynamik wie echte Kolibris anzuwenden, bei der kleine Bewegungsunterschiede zwischen den Flügeln zu dramatischen Manövern führen.
Diese Motoren mit Direktantrieb erlauben zugleich, die robusten Flügel als Sensoren zu nutzen. Indem die Motorströme genutzt werden, um Änderungen in der Belastung wahrzunehmen, kann der Boden ebenso erkannt werden (durch den aerodynamischen Effekt) wie die Wände (durch Berührungen der Flügel). Der Flugroboter kann sich dadurch praktisch durch seine Umgebung ‚tasten‘. Außerdem ist das Steuerungssystem in der Lage, Schäden an den Flügeln zu kompensieren.
Zu den weiteren Vorteilen gehört die Tatsache, daß der Roboter fast geräuschlos fliegen und mit Turbulenzen problemlos umgehen kann. Das Team entwickelte auch eine Version, die mit einem Gewicht von nur 1 g mehr auf der Skala der Insekten liegt.
Zur Erinnerung: Ein zumindest äußerlich ähnliches Modell namens Nano Hummingbird war als 19 g schwerer Demonstrator bereits im Februar 2011 von der Firma AeroVironment vorgestellt worden. Und im April 2020 wird von Nature on PBS ein Video veröffentlicht, auf dem ein weiterer Robot-Kolibri, dessen Herkunft sich bislang nicht eruieren ließ, durch einen Schwarm Monarch-Schmetterlinge fliegt. Diese mit Kamera ausgestattete Version fliegt allerdings mit zwei geschützten Propellern über den Flügeln.
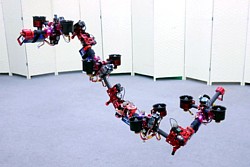
Im Juni 2018 verlautet, daß Wissenschaftler des Jouhou
System Kougaku Laboratory der Universität von Tokio um Fan
Shi einen modularen Flugroboter entwickelt
haben, der von Mantelpropellern angetrieben wird und seine Form während
des Fluges verändern kann.
Die Drohne mit dem im Doppelsinn passenden Namen DRAGON (Dual-rotor embedded multilink robot with the fability of multi-degree-of-freedom aerial transformation) besteht aus einer Reihe separater Module, die über angetriebene Scharniergelenke miteinander verbunden sind und jeweils ein Paar kanalisierter Gebläseschubdüsen besitzen. Diese können so betätigt werden, daß sich jede Sektion unabhängig voneinander bewegen läßt.
Dadurch hat der DRAGON die Fähigkeit, sich in der Luft in mehreren Freiheitsgraden zu verwandeln und seine Form von einem Quadrat in eine Schlange und jede beliebige Form dazwischen verändern, so daß er sich strecken und in der Luft drehen kann, um sich durch enge Passagen zu quetschen oder durch kleine Löcher zu fliegen. Eine halbautonome Software entscheidet, welche Form die Drohne annimmt und wie sich jedes Modul bewegt, um diese Form zu erreichen.
Dank fingerähnlicher Zangen an jedem Ende kann der DRAGON zudem Objekte manipulieren. Derzeit hat der Prototyp vier Sektionen, aber die Forscher planen, bald eine Version mit zwölf Sektionen zu bauen. Ein solcher Roboter wäre in der Lage, sehr große Objekte in allen möglichen Formen aufzunehmen und trotz seiner Größe durch sehr kleine Öffnungen zu passen. Mehr über die Entwicklung findet sich in der Übersicht 2023.

Nicht ganz so komplex aufgebaut ist ein Konstrukt namens Ran’s
Dragon, das im September 2019 vorgestellt wird.
Diese Flugmaschine ist von einer Gruppe von Ingenieuren um Ran D. St. Clair aus San José in Kalifornien konstruiert worden, die schon zuvor diverse seltsame Flugobjekte zusammengebaut haben, wie u.a. einen 6,5 kg schweren fliegenden Flügel mit vier Motoren und einer Spannweite von 10 m. Vermutlich ausschließlich aus Spaß an der Sache, denn mehr ist über ihren Hintergrund oder ihre Absichten nicht herauszufinden. Dafür werden einige Bauanleitungen zum kostenlosen download angeboten.
Der aktuelle, senkrecht startende ‚Drachen‘ besteht aus acht klappbaren Styroporplatten und vier Drohnenpropellern, die zusammen ein flexibles fliegendes Band bilden.

Ebenfalls an der japanischen Origami-Technik orientierten sich südkoreanische
Forscher um Prof. Kyu-Jin Cho am Soft Robotics Research
Center der Seoul National University (SNU), die ihrem
im März 2018 veröffentlichten und im Netz einsehbaren
Bericht zufolge eine Drohne entwickelt haben, die speziell in in beengte
Räume eindringen soll. Sie wird an dieser Stelle erwähnt, weil sie
für ihre Aufgabe mit einem speziellen ausfahrbaren Greifarm ausgestattet
ist.
Die Drohne ist dafür gedacht, bei Verdacht auf Umweltsünden in Schornsteine, Sickergruben und andere schwer zugängliche Stellen zu fliegen, dort Proben zu nehmen und die verdächtigen Stellen zu filmen. Der hierfür unter dem Flugobjekt installierte Arm ist während des Fluges in Ruhestellung, damit er nicht an Hindernisse stößt. Am Ziel angekommen senkt er sich ab. An seinem Ende befinden sich eine Kamera und ein Greifer bzw. ein Behälter für die Entnahme von Flüssigkeitsproben.
Das Schlüsselprinzip bei der Konstruktion des Greifarms ist ein zusammenklappbares Gehäuse, dessen variabler Steifigkeitsmechanismus auf dem Origami-Prinzip des senkrechten Faltens basiert: Zwei senkrechte Faltlinien hemmen sich gegenseitig in ihrer Bewegung. Durch die Anwendung dieses Prinzips kann eine sechseckige Struktur von beispielsweise 40 x 40 x 100 mm, die weniger als 30 g wiegt, einer Druckbelastung von mehr als 12 kg standhalten. Andererseits lassen sich die Gehäuse leicht entriegeln, und die Struktur wird durch Ziehen an einem einzigen Draht mit geringer Kraft wieder flach gefaltet.
(in Aktion)
Der nach diesem Prinzip konstruierte Arm wiegt einschließlich Elektromotor und Seilzug nur 260 g, was durch ein Materialmix aus Polyethylenterephthalat (PET) und Ripstop erreicht wird, ein besonders reißfestes Gewebe, das auch für Fallschirme genutzt wird. Bei der Herstellung werden zwei PET-Folien mit dem dazwischenliegenden Ripstop-Gewebe mittels Heißpresse zusammengefügt.
Das Ausfahren des Arms geschieht durch einen einzelnen Elektromotor, der seine Kraft über einen Seilzug auf die sieben übereinander gestapelten, faltbaren Boxen und ihren zusätzlichen Elementen, den Schließern überträgt, die im zusammengefalteten Zustand nur 4 cm dick sind. Beim Ausfahren wird die Sehne des Seilzugs von der Rolle gelassen und elastische Bänder ziehen die einzelnen Teile des Arms in ihre Boxform. Dabei schließen sich die Boxen um die beweglichen Teile und die Schließer werden durch kleine Magneten in ihre Position gebracht, um so für eine Aussteifung zu sorgen.
Nach Angaben der Wissenschaftler ist die filigrane Struktur einer Box mit Schließklappen fünfmal widerstandsfähiger gegen Verbiegen und 200 mal widerstandsfähiger gegen Zusammendrücken. Im ausgefahrenen Zustand erreicht der Roboterarm eine Länge von 70 cm.
Beim Einfahren des Arms faltet der Elektromotor durch das Aufrollen der Sehne gegen den Widerstand der elastischen Bänder und Magneten die Boxen wieder zusammen. Eine Schwäche der Erfindung ist, daß die Länge des Arms durch die Reibung der Sehne begrenzt wird, obwohl sie über Rollen geführt wird. Zudem wird der Roboterarm instabil, wenn die Drohne mit dem ausgefahrenen Arm schnell fliegt. Da ebenfalls als Nachteil gilt, daß der Arm starr ist, arbeiten die Forscher bereits an einem faltbaren Arm mit Gelenken.

Im Mai wird auf der IEEE International Conference on Robotics and
Automation 2018 in Brisbane eine experimentelle, neue Propellerschutzvorrichtung
gezeigt, die die schnell drehenden und möglicherweise gefährlichen Rotorblätter
einer Quadrokopter-Drohne stoppt, bevor sie überhaupt Schaden anrichten
können. Das als Safety Rotor bezeichnete System wird
von einem Team der australischen University of Queensland unter
der Leitung von Paul Pounds entwickelt.
Es besteht aus vier leichten Kunststoffbügeln, von denen jeder um einen der Rotorsätze der Drohne befestigt ist. Da die Bügel über ein reibungsarmes Lager auf der Rotorwelle montiert sind, drehen sie sich nicht so schnell wie die Rotoren und können auch unabhängig von diesen angehalten werden.
Sollte etwas, wie z.B. ein Finger, versehentlich in Richtung eines der Rotoren wandern, wird es vom Bügel getroffen, bevor es mit dem Rotorblatt selbst in Kontakt kommt. Dies führt dazu, daß der Bügel nicht mehr rotiert, was sofort von einem optischen Infrarotsensor am Rotorarm der Drohne, der unter dem Bügel angebracht ist, erkannt wird. Dieser Sensor veranlaßt anschließend den Mikrocontroller, der den Motor des Rotors antreibt, ein elektrodynamisches Bremssystem anzuwenden. Dadurch werden die Blätter in weniger als 0,06 Sekunden ab dem Zeitpunkt, an dem der Finger den Reifen berührt, am Drehen gehindert.
In seiner gegenwärtigen Form wiegt ein kompletter Sicherheitsrotor ca. 20 g und könnte für etwa 11 $ an bestehenden Drohnen nachgerüstet werden, wodurch der Luftstrom nur minimal behindert oder die Flugzeit reduziert würde. In Massenproduktion hergestellt und in Drohnen eingebaut könnte es möglicherweise weniger als 5 $ pro Einheit kosten. Das Team von Pounds sucht nun nach Partnern, die an der Kommerzialisierung des Systems interessiert sind.
Weiter mit den Elektro- und Solarfluggeräten ...