Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2017 (D)
Die technologischen Entwicklungen des Jahres 2017 beginnen
mit einer Meldung Mitte Januar, daß Forscher der University of
Bristol (UoB)
um Tom Richardson ein Fluggerät präsentieren, das
mit Hilfe einiger schlauer Algorithmen und Morphing-Flügeln gelernt hat,
wie ein Vogel auf dem Boden zu landen. Wir alle haben schon gesehen,
wie Vögel z.B. auf einem Felsvorsprung aufsetzen. Sie stürzen darauf
zu, kippen hoch und fächern dann im letzten Moment ihre Flügel weit auf,
um mit fast Null Geschwindigkeit auf die gewünschte Stelle zu fallen.

Würde ein Flugzeug mit festen Tragflächen ein solcher Manöver versuchen, würde es aufgrund von mangelndem Auftrieb fast sofort die Kontrolle verlieren und abstürzen. Das UAV der UoB kann seine Flügel hingegen nach oben neigen, um mehr Widerstand für die Landung zu erzeugen, während ein Abschnitt der Flügel so geformt ist, daß er gerade genug Hubkraft bietet, um eine stabile Flugsteuerung aufrechtzuerhalten. Um diese komplexen Flügelstrukturen zu kontrollieren, verwenden die Forscher in Zusammenarbeit mit der Firma BMT Defence Services spezielle Algorithmen für maschinelles Lernen, um einen von Vögeln inspirierten Flugcontroller zu entwickeln.
Die Morphing-Wing-Technologie ist schon zuvor eingesetzt worden, z.B. im Jahr 2011 an der University of California, San Diego (s.d.), doch das UAV der UoB ist das erste, das solche Technologie effektiv einsetzt, um Landemanöver wie ein Vogel durchzuführen. Das UAV wird bereits getestet, und das Team ist dabei, das System so weit zu entwickeln, daß es fortlaufende und wiederholbare Bodenlandungen durchführen kann.
Leider ist der Hintergrund dieser Entwicklung wieder einmal ‚militarisiert‘, denn die Forschung wird im Rahmen eines 18-monatigen Projekts für das ‚Autonomous Systems Underpinning Research Program‘ des Defence Science and Technology Laboratory durchgeführt und soll dazu beitragen, „die Entwicklung, Produktion, Bereitstellung und den Einsatz intelligenter unbemannter Systeme durch die britischen Streitkräfte zu erweitern.“

(Grafik)
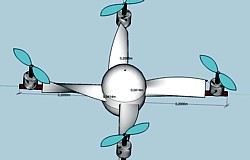
Fast zeitgleich veröffentlicht die NASA das Ergebnis
einer Simulation auf ihrem Supercomputer am Ames Research
Center im kalifornischen Silicon Valley, bei der anhand des 3D-Modells
eines DJI Phantom 3-Quadrokopters nicht nur gezeigt wird, wie sich die
Luft von den Propellern wegbewegt, sondern auch, wie sie mit dem Körper
des X-förmigen Fluggeräts interagiert. Druckänderungen werden mit Farbe
angezeigt. Bereiche mit hohem Druck sind rot, die mit niedrigem Druck
blau.
Bei den Forschungen um das Design und die Flugeigenschaften zukünftiger Drohnen zu verbessern, fügen die Forscher dem Fahrzeug vier weitere Rotoren hinzu, um den Effekt auf die Leistung des Quadrokopters zu untersuchen. Die Konfiguration führt zu einer fast zweifachen Zunahme der Schubkraft.

(simuliert)
Ebenfalls im Januar stellt das in Boston beheimatete und 2015 gegeründete
US-Startup Airmada Inc. eine Bodenstation für Drohnen
vor, von der aus die unbemannten Fluggeräte mit Hilfe von Roboter-Technik
auch selbständig starten und landen sowie ihre Batterien aufladen oder
austauschen können. Ähnliche Technologien hatte es schon in den vergangenen
Jahren gegeben, die zum Teil auch schon wesentlich weiterentwickelter
waren. Als Beispiel sei auf die portable DRONEBOX der
Firma HUS Unmanned Systems Pte Ltd. (s. 2015)
oder die DroneHome und das Airbase System aus
dem Jahr 2016 verwiesen
(s.d.).
Nach Angaben der Firma könnten die Drohnen – samt der Bodenboxen – um Standorte wie Lagerhäuser oder Baustellen herum stationiert werden, damit sie Patrouillen fliegen oder bei Alarmen rasch losgeschickt werden können. Wenn eine Drohne benötigt wird, kommt sie aus der Kiste, fliegt zum Einsatzort und schickt über das Internet Videobilder von dort an das menschliche Sicherheitspersonal. Nach ihrer Mission landet sie wieder auf der Plattform, und die Kiste schließt sich. Ein Mechanismus im Inneren kann dann die Batterien der Drohne aufladen oder austauschen.
Das Unternehmen will die ersten seiner Drohnen und Bodenstationen noch in diesem Jahr bei Kunden im Einsatz sehen, primär auf dem Sicherheitsmarkt und in Form einer Verpachtung. Später könnten die Systeme auch in anderen Bereichen wie der Paketauslieferung gebraucht werden. Beim aktuellen Update Mitte 2018 ist die Firma jedoch nicht mehr zu finden.

Im Januar 2017 präsentiert die Firma Autel Robotics eine
vertikal startende und landende Starrflügel-Drohne namens Kestrel,
die im Vorjahr auf der CES 2016 erstmals als Konzept vorgestellt
worden war. Dazu wird noch ein neues und nur 5 kg schweres VTOL-Konzept
in das Forschungsprogramm der Firma aufgenommen, das eine neue Propellerkonfiguration
und eine kompakte, leichte Zelle umfaßt.
Die im Jahr 2014 gegründete Autel Robotics mit Hauptsitz in Shenzhen, Chine, sowie F&E-Stützpunkten in Seattle und München, demonstriert schon im Folgejahr die Präzision ihrer Flugsteuerung mit einer Show, bei der 50 Drohnen synchronisiert fliegen. Außerdem wird die erste Generation des X-Star Quadrokopters auf den Markt gebracht, zu einem Preis von 899 $. 2016 folgt die zweite Generation – während zeitgleich der Prototyp des VTOL-Flugzeugs Kestrel entwickelt wird, das bereits im März seinen Jungfernflug macht.

Das maximale Abfluggewicht der mit vier Kipp-Propellern ausgestatteten Kestrel beträgt 14 kg, die Nutzlast 2 kg und die Fluggeschwindigkeit 65 km/h bei einer Spitzengeschwindigkeit von 100 km/h. Die Reichweite wird mit bis zu 100 km angegeben, die Flugzeit mit 1,2 – 2 Stunden.
Zum Thanksgiving im November veröffentlicht die Firma ein Werbevideo, in welchem es seinen Quadrokopter benutzt, um ein komplettes Essen zuzubereiten. Es zeigt sich, daß die rotierenden Propeller gut geeignet sind, um Kartoffeln und Karotten zu schälen bzw. nach dem Kochen zu zerstückeln. Indem die Propeller dann durch Rührköpfe ersetzt werden, kann man sogar vier verschiedene Mischungen gleichzeitig bearbeiten. Die Küche bedarf danach allerdings einer Grundreinigung.
Im Jahr 2019 wird die erste Generation der faltbaren EVO Kamera-Drohne in die Läden gebracht, die 2020 von der EVO II-Plattform abgelöst wird, welche zu diesem Zeitpunkt als die leistungsstärkste Kompaktdrohne auf dem Markt gilt, mit vier austauschbaren Nutzlasten, einer 8K-Kamera und RTK-Fähigkeiten (Real-Time Kinematic).
Den jüngste Zuwachs bilden 2021 drei verschiedene Starrflügel-Drohnen der Dragonfish Serie, die mit zwei Kipprotoren an den Flügelenden und zwei festen am Korpus ausgestattet sind. Sie wiegen zwischen 4,5 kg und 14,5 kg und sind bis zu 180 km/h schnell.
Inzwischen gibt für die EVO-Industriedrohnen zudem eine automatische Ladestation mit aufklappbarer Haube namens EVO NEST, die sogar über eine eingebauten Klimaanlage verfügt. Außerdem existiert auch das Tochterunternehmen Autel Robotics USA mit Sitz in Bothell, Washington.

Eine sehr eigene, von Keith Kaseman an der University
of Tennessee (UT) designte Drohnen-Landeplattform stellt die
Freiform-3D-Druck-Firma Branch Technology aus Chattanooga
im April 2017 vor. Neben einigen Befestigungs- und Trageelementen
aus Edelstahl besteht die Vorrichtung, die an die Kante eines Flachdachs
montierbar ist, aus einem 3D-gedruckten Gitterwerk aus kohlenstoffdurchtränktem
Kunststoff.
Installiert wurde der 3,6 m hohe und 200 kg schwere Dronopod-Prototyp über der West Jackson Avenue in der Innenstadt von Knoxville bereits im März. Das Projekt war mit 5.000 $ von der UT School of Architecture gefördert und umfaßte auch eine Zusammenarbeit mit dem UT Fab Lab, das die Edelstahlkomponenten des Dronopods herstellte. Ein weiterer Partner ist die experimentelle Raumplanungsfirma Knoxville Bureau of Air and Space (KBAS).
Etwas erfolgreicher als die o.e. Airmada Inc. scheint
die Anfang 2016 gegründete
kanadische Firma SkyX Systems Corp. in Markham, Ontario,
zu sein, die im Juni 2017 die Installation ihrer ersten xStation ankündigt.

Bei dieser handelt es um eine übergroße Ladeplattform mit Klappdach, die in Abständen auf einer Route plaziert werden kann, um die Reichweite der firmeneigenen Drohnen nahezu unbegrenzt zu erweitern. Denn erst wenn diese nicht durch die Batterielebensdauer der Drohnen begrenzt ist, eignen sich diese zur autonomen Überwachung weitreichender Infrastruktur wie Eisenbahnstrecken oder Gas- und Öl-Pipelines.
Das System ist so konzipiert, daß es mit dem SkyOne UAV des Unternehmens arbeitet, einem autonomen Hybridflugzeug, das vertikal startet, bevor es in den Starrflügler-Flug kippt. Der SkyOne hat derzeit eine Reichweite von etwa 100 km, aber in einer Langstreckenanwendung könnte er effektiv nur die Hälfte davon nutzen, bevor er umdrehen und nach Hause zurückkehren muß, um wieder aufzuladen.

in Mexiko
Im richtigen Einsatz würden die xStations an bestimmten Punkten entlang einer gut befahrenen Route installiert werden, um den Drohnenbestand nach Bedarf aufzustocken. Wenn einer SkyOne-Drohne der Saft ausgeht, hilft ihr ein Algorithmus, die nächste Ladestation zu finden. Dort landet sie auf der Plattform, um aufzuladen, während sich das Klappdach der xStation schließt, um die Drohne vor den Elementen zu schützen. Wenn sie wieder einsatzbereit ist, führt sie einen kompletten Systemcheck durch, bevor sie sich wieder in die Luft erhebt und mit ihrer Mission weitermacht.
Über die angekündigte Installation ist erst einmal nichts mehr zu erfahren, doch im November macht sich etwa die Hälfte des SkyX-Teams mitsamt zwei Drohnen auf den Weg nach Mexiko, um einer Öl- und Gasfirma, die nach einer effizienten Möglichkeit zur Überwachung einer langen Pipeline sucht, die Technologie zu demonstrieren. Die Tests gehen im Laufe des Jahres 2018 weiter, bislang sind jedoch noch keine Geschäftsabschlüsse zu verzeichnen.
Über eine dritte Variante wird im Dezember berichtet. Diesmal ist es
die US-Firma American Robotics Inc. (AR) aus Boston,
die mit ihrem Scout einen autonomen Quadrokopter für
Landwirte vorstellt, der sowohl mit einer visuellen als auch mit einer
multispektralen Kamera ausgestattet ist und in einem geschützten Kasten
stationiert ist, der Drone Station genannt wird.

Wenn es für den Scout an der Zeit ist, seinen täglichen Inspektionsflug zu machen, zieht sich das Dach des Unterstandes zurück und die Drohne steigt automatisch in die Luft. Die Route, der sie dabei folgt, wird bei der Erstinstallation des Systems vorprogrammiert. Nach Beendigung des Fluges landet die Drohne wieder auf dem Unterstand und wird nach innen abgesenkt. Ihre Batterie wird dann automatisch für das nächste Mal geladen, während die gesammelten Daten auf einen Cloud-basierten Server hochgeladen werden, auf den der Landwirt dann zugreifen kann. Die Drohne kann ungefähr 16 km zwischen den Ladungen fliegen, wodurch der effektive Radius ungefähr 8 km beträgt.
Die Firma hatte im Mai diesen Jahres 1,1 Mio. $ an Seed-Finanzierung gesammelt, darunter von Brain Robotics Capital, um die weitere Entwicklung ihrer Drohnentechnologie zu finanzieren. Diese sei entstanden, nachdem Gespräche mit Landwirten und Agronomen gezeigt hätten, daß die gegenwärtige Technologie immer noch zu manuell und zu kompliziert sei. Insbesondere für große kommerzielle Farmen, die Tausende Hektar und Standorte haben, die zum Teil kilometerweit voneinander entfernt sind, sind Drohnen von der Stange zu zeitraubend, da der Betreiber zu jedem Feld fahren und sie dort von Hand starten muß.
Laut Angaben des Unternehmens wurde das System bereits an mehreren landwirtschaftlichen Standorten in den USA implementiert, wofür ich bislang aber keine Bestätigung fand. Im Februar 2018 nimmt das Startup in einer zweiten Seed-Runde von den gleichen Anlegern und unbenannten Angel-Investoren über 2 Mio. $ ein. Nun sollen bei einer ausgewählten Gruppe von Farmern in zwei oder drei Regionen der USA ausgedehnte Betatests durchgeführt werden. Erste reale Tests werden 2019 erwartet, gefolgt von einer kommerziellen Markteinführung.

Charging Pad
Im gleichen Kontext präsentiert die Firma Heisha im August 2019 ein
neues unbemanntes VTOL-Flugzeug nebst einem C200
Drone Charging Pad, einer automatisierten Selbstlade-Station, die jederzeit
und überall zur Überwachung von Acker-, Weide- und privat genutzten Flächen
eingesetzt werden kann.
Folgemodelle tragen die Bezeichnungen C300 bzw. C500 (o. D.NEST) und kosten zwischen 590 $ und 2.888 $.
Im Februar 2017 zeigt die DARPA ein von der Firma Aurora
Flight Sciences entwickeltes eigenständiges, tragbares Demonstrationssystem
namens SideArm, das unbemannte Flugsysteme horizontal
zu starten erlaubt und sie auch wieder aus der Luft pflücken kann. Der
Einsatz ist für kleinere Schiffe, feste Basen und sogar LKWs gedacht.
Das System paßt in einen Standard 6-m-Container und kann daher problemlos
transportiert werden.
Das im Dezember 2016 erfolgreich getestete System, Teil des Programms Tactical Exploited Reconnaissance Node (Tern), hat die Fähigkeit, Fluggeräte bis zu 499 kg zurückzuholen. Während des Tests nahm das System wiederholt eine 181 kg schwere Lockheed Martin Fury UAS auf, die von einem externen Katapult gestartet worden war.
Anstatt sich wie traditionelle Drohnenfangsysteme auf ein großes Netz zu verlassen, verwendet der SideArm einen Haken, um die Rückseite der eintreffenden Drohne zu erfassen, die dann entlang einer Schiene gleitend kontrolliert verlangsamt wird. Anschließend wird die Drohne durch ein kleines Netz zum Stillstand gebracht, gekoppelt mit einer Reihe von Widerhaken, die an der Nase des Fluggeräte angebracht sind, um sicherzustellen, daß es nicht wegrutscht.
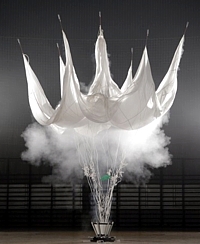
Ebenfalls im Februar 2017 berichten die Fachblogs
über eine innovative Alternative zu den bestehenden Drohnen-Rettungssystemen
wie Fallschirmen. Das entsprechende US-Patent wird der Firma Meteomatics
AG zugesprochen (US-Nr. 9650132, angemeldet 2014,
erteilt 2017; s. DE-Priorität Nr. 10 2013 225 304.4
von 2015). Erfinder ist der Firmeninhaber Martin
Johannes Fengler.
(Grafik)
Notfallsysteme für Drohnen sind notwendig, um im Falle eines Kontrollverlusts ihre Zerstörung zu verhindern und um die Gefahr für Menschen und Gegenstände auf dem Boden zu minimieren. Im vorliegenden Fall sind mindestens zwei der vier symmetrisch angeordneten Propellerarme der Drohne flach und verdreht. Im Falle eines unkontrollierten Sturzes führt dies dazu, daß sich die Drohne horizontal um ihre Hochachse (o. Gierachse) dreht, was die Lage der Drohne im Raum stabilisiert. Weiterhin erzeugt die Rotation einen dynamischen Auftrieb, der die Fall- und Aufschlaggeschwindigkeit der Drohne reduziert. Die Mehrfachauslastung eines Bauteils wie der passiven Auftriebselemente spart zudem Gewicht.
Den auf der Firmen-Homepage abgebildeten verschiedenen Quadro- und Hexakoptern ist bislang allerdings nicht anzusehen, daß sie auf dem obigen Patent basieren.
Zum Hintergrund des Unternehmens: Die im Jahr 2012 gegründete Firma Meteomatics AG (bzw. GmbH) mit Sitz in St. Gallen und Berlin, die sich mit der Entwicklung von meteorologischen Software-Produkten, der Verarbeitung und Zulieferung von Wetterdaten und der Beratung befaßt, will das Problem lösen, daß Wettermodelle bislang aufgrund fehlender Meßdaten Schwierigkeiten haben, Wetterphänomene wie Nebel, Hochnebel, Eisregen und Gewitter präzise vorherzusagen.
Die Ursachen dafür liegen darin, daß diese Wetterphänomene zum einen von lokalen Gegebenheiten geprägt sind und zum anderen, daß gerade über die unteren Luftschichten (bis ca. 2 km über Grund) praktisch keine Meßdaten verfügbar sind. Die Lösung ist eine selbst entwickelte und patentiere Wetterdrohne namens Meteodrone, die im Flug Daten aus eben dieser ‚Grundschicht‘ erhebt. Damit sei es zum ersten Mal möglich, präzise und direkt Temperatur, Feuchte und Wind dieser Schicht zu erfassen.
2013 wird die Drohne das erste Mal unter Realbedingungen getestet, und in den Folgejahren werden weitere Meßkampagnen durchgeführt, um die Qualität der erhobenen Meßdaten zu prüfen. Der operationelle Drohnenbetrieb wird 2016 aufgenommen, wobei die Fluggeräte derzeit noch von Drohnenpiloten gesteuert werden. In Entwicklung befindet sich eine sogenannte MeteoBase, mit der zukünftig bis zu zehn Drohnen gleichzeitig gesteuert und so Wetterdaten in großem Umfang erhoben werden können. Der erste Prototyp wird 2017 unter Realbedingungen getestet.
Dank einer Bewilligung des Bundesamts für Zivilluftfahrt (BAZL) ist Meteomatics die erste Schweizer Firma, die Mini-Drohnen über die Sichtlinie hinaus fliegen darf.

der EPFL
Ebenfalls im Februar 2017 stellen Forscher der École
polytechnique fédérale de Lausanne (EPFL) um Prof. Dario
Floreano eine neuartige Drohne vor, die aufgrund ihrer spezifischen
Konstruktion auch heftigere Unfälle und Zusammenstöße ohne größere
Schäden übersteht.
Die Konstrukteure Stefano Mintchev und Sébastien Douglas de Rivaz haben sich beim Bau von Bienen und Wespen inspirieren lassen. Diese Insekten haben Flügel, die dank eines speziellen Exoskeletts einerseits gerade hart genug sind, um ihnen gute Flugeigenschaften zu verleihen, aber andererseits auch flexibel genug, um beim harten Aufprallen den Druck abzufangen.
Während eine Drohne aus leichtem Kunststoff oder Kohlefaser, die gegen ein Gebäude, eine Wand, einen Baum oder auf den Boden kracht, danach sehr wahrscheinlich kaputt ist, stoßen Fluginsekten ständig gegen Pflanzen, Wände oder Fensterscheiben, ohne daß ihnen dabei etwas passiert. Genau deshalb orientiert sich das Team an den Insektenvorbildern, um einen flexiblen, aber gleichzeitig auch besonders robusten Rahmen für Drohnen zu konstruieren.
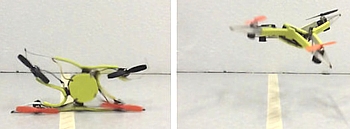
Das Ergebnis ist ein Prototyp, der während des Fluges in der Luft steif bleibt, aber im Fall einer Kollision nachgibt. Dabei war die zentrale Herausforderung das Finden des richtigen Gleichgewichts aus Härte und Flexibilität. Ist das Material der Drohne zu weich, kann sie zwar einen Aufprall gut überstehen, läßt sich aber vor allem bei schwierigeren Wetterbedingungen nur sehr schlecht steuern und hätte zudem auch große Probleme damit, zusätzliche Ladungen zu transportieren.
Das aktuelle Modell hat einen Drohnenrumpf mit einem flexiblen, elastischen Rahmen, der mit einer Reihe von Magnetgelenken an einem zentralen starren Kern befestigt ist, die jeweils aus zwei Magneten und einer Feder bestehen. Bei einer Kollision bewirkt die Aufprallkraft, daß sich der Kern vom äußeren Rahmen löst, der sich zusammendrückt und deformiert, um die Aufprallenergie zu absorbieren. Sobald die Drohne fertig ist, herumzuspringen, rutscht durch die Magnete alles zurück, und sie ist sofort bereit, wieder in die Lüfte zu steigen – vorausgesetzt, die Drohne ist nicht auf dem Rücken gelandet.
Floreano und Mintchev hatten u.a. im Mai 2015 eine Origami-inspirierte Mini-Drohne gezeigt, sowie 2016 eine Drohne mit Käfer-Flügeln und eine andere mit Faltflügeln (s.d.).

Im Juli 2018 stellen die EPFL-Forscher eine weitere experimentelle Drohne vor, die je nach den Umständen steif oder flexibel sein kann, um im Falle eines Absturzes Schäden zu verhindern. In der Luft ist die Struktur steif genug, um ihr eigenes Gewicht zu tragen und dem Schub der Propeller zu widerstehen. Wenn die Drohne jedoch auf etwas auftrifft, wird sie flexibel, um den Stoß zu absorbieren und somit den Schaden zu minimieren.
Die sogenannte hybride Origami-Drohne ist von Insektenflügeln inspiriert, die in den tragenden Teilen starr, an den Gelenken aber flexibel sind. Die Elastizität der Drohne beruht dabei auf einer einzigartigen Kombination aus steifen und elastischen Schichten. Eine Elastomer-Membran wird gedehnt und dann zwischen starre Platten eingeklemmt. Im Ruhezustand des Systems halten die Platten zusammen und verleihen der Struktur ihre Steifigkeit. Wenn jedoch genügend Kraft ausgeübt wird, ziehen sich die Platten auseinander und die Struktur kann sich verbiegen.
Die Arme bleiben dabei mit dem Zentralmodul verbunden, haben aber genau die richtige Menge an Nachgiebigkeit, um noch immer Komponenten wie Batterien und Elektronik zu schützen. Das neue Design überwindet damit einige der Probleme seiner Vorgänger, die im Allgemeinen in eine von zwei Kategorien fallen: steife Strukturen, die ein beträchtliches Gewicht tragen können, aber unter zu hoher Belastung auseinander brechen, und flexible Strukturen, die so gut wie gar kein Gewicht tragen können.
Bei der aktuellen Recherche stellte sich übrigens heraus, daß das EPFL bereits im Mai 2015 einen kleinen Quadrokopter gezeigt hatte, dessen aus Fiberglas und leichtem unelastischem Polyester hergestellten Gelenkarme durch die Kraft seiner Rotoren selbständig ausklappen, worauf er im Bruchteil einer Sekunde abhebt. Wenn sie nicht in Gebrauch sind, falten sich die Arme zu einem Trapez zusammen.

(H-Konfiguration)
Im Dezember 2018 folgt die nächste experimentelle faltbare Drohne des Mintchev-Teams, die durch enge Löcher zu Einsturzopfern fliegen soll.
Die dank ihrer integrierten Wahrnehmungs- und Kontrollsysteme sehr vielseitige und autonome Drohne nimmt verschiedene Konfigurationen an, je nachdem was im Feld benötigt wird. Inspiriert von Vögeln, die bei Platzknappheit ihre Flügel in der Luft zusammenfalten, klappt auch sie sich zusammen, um Ritzen oder kleinere Löcher in der Wand zu passieren.

(O-Konfiguration)
Dabei ist die Lösung mechanisch gesehen recht einfach und garantiert auch jederzeit einen stabilen Flug: Vier unabhängig drehbare Propeller sind auf mobilen Armen montiert, die sich unabhängig voneinander durch einzelne Servomotoren um den Hauptrahmen schwenken lassen. Das Steuerungssystem reguliert in Echtzeit jede neue Position der Arme und paßt die Propellergeschwindigkeit an den jeweiligen Schwerpunkt an.
Die Standardkonfiguration ist X-förmig: Die vier Arme sind ausgestreckt und die Propeller haben einen möglichst großen Abstand voneinander. In einem engen Durchgang wechselt die Drohne hingegen in eine H-Form und richtet alle Arme entlang einer Achse aus, indem die beiden vorderen Arme nach vorne klappen, während die beiden hinteren nach hinten klappen und das Fluggerät erheblich schmaler machen.
Will die Drohne durch eine horizontale Öffnung nach oben oder unten schweben, nimmt sie eine O-Form ein, indem alle Arme zur Seite geklappt und möglichst nah am Körper positioniert werden, wodurch der Umfang der Drohne minimiert wird. Während des Weiterflugs vergrößert sich die Drohne dann wieder.
Die Forscher wollen die Struktur der Drohne nun so weiterentwickeln, daß sie sich in alle drei Dimensionen zusammenfalten kann. Zudem sollen sie verbesserte Algorithmen in Zukunft vollständig autonom machen. Ziel ist es, daß die Drohne in einem Katastrophenszenario selber nach vermißten Personen suchen und den besten Weg für ihre Bergung aufzeigen kann. Anweisungen wie z.B. „das Gebäude betreten, jeden Raum inspizieren und zurückzukommen“ soll sie dann eigenständig ausführen können.

Eine Drohne mit mehreren sehr speziellen technischen Ausprägungen, die
im Februar 2017 ihren ersten Testflug absolviert und
dann ab Juni in den Verkauf geht, ist die Volanti der
in Sydney beheimateten Firma Carbonix.
Das Unternehmen war 2011 von Dario Valenza nach einer erfolgreichen Karriere bei den America’s Cup Segelwettbewerben unter dem Namen Carbonicboats Pty Ltd. gegründet worden, um wettbewerbsfähige ferngesteuerte Yachten und A-Klasse Katamarane zu entwickeln und zu produzieren. Im März 2014 beginnt Carbonix mit dem Bau des ersten UAV, einer Katapult-Starrflügel-Drohne namens Cometa, die von dem Designpartner D3 Applied Technologies für einen spanischen Rüstungskonzern entworfen worden war. Das erste Exemplar wird bereits im September verkauft.
Ab September 2015 entwickelt und baut die Firma die ersten VTOL-Pods, um aus dem Cometa ein Starrflügler-Mehrrotor-UAV zu machen. Die Entwürfe für die Volanti werden im Dezember 2016 abgeschlossen, nachdem das VTOL-Design optimiert wurde, um eine maximale Effizienz und Aerodynamik zu gewährleisten. Ohne die Avionik wiegt die neue Flugzeugzelle nur 4 kg.
Die Autopilot-gesteuerte Hybrid-Drohne aus Carbon-Verbundwerkstoffen hat eine Spannweite von 2,74 m und eine Länge von 1,95 m. Sie verwendet ein Quadrokopter-Rotoren-System für den senkrechten Start, bevor sie in den Horizontalflug übergeht, für den es einen eigenen Propeller gibt. Dank ihrer Größe funktioniert sie auch bei Windgeschwindigkeiten von bis zu 60 km/h zuverlässig.

Mit elektrischer Energie und einer Nutzlast von 2 kg beträgt die Flugzeit über zwei Stunden, während die benzinbetriebene Ausführung bis zu sieben Stunden schafft und 6 kg transportieren kann. Für den Transport läßt sich die Drohne innerhalb von fünf Minuten zerlegen, um in eine 163 x 100 x 45 cm große Tragetasche zu passen.
Billig ist eine Volanti nicht, ihr Preis beträgt 150.000 AU $ (~ 114.000 US $), doch dafür bekommt man immerhin ein „vollständig getestetes, integriertes, langdauerndes UAV-System mit einer von Hand gebauten, fortschrittlichen Verbundwerkstoffzelle und einem flexiblen VTOL-Startsystem“. Die Firma bewirbt ihr Fluggerät als eine Maschine, die für genaue Vermessung und Kartierung, Bergbau- und Infrastrukturbewertung, Landwirtschaft und Notfallmaßnahmen in großen Gebieten und über lange Einsatzzeiten geeignet ist.
Im Mai 2018 meldet Carbonix, daß man der Hitachi Consulting eine strategische Allianz eingegangen sei, um eine vollständig autonome UAV-Farming-Lösung namens Eagle’s Nest zu entwickeln, und im Juli bekommt die Firma gute Presse, als Fujitsu die Volanti nutzt, um im Rahmen des ‚Saving Our Species program‘ der Regierung von New South Wales gefährdete Arten zu retten.
Zu diesem Zeitpunkt wird neben der Volanti auch noch das Modell Domani Electric (o. Domani E) angeboten, das mit einer Spannweite von 4,5 m und einer Nutzlast von bis zu 5 kg als die nächste Generation der Carbonix-Drohnen bezeichnet wird.

Ein strukturell ähnliches VTOL-Fluggerät präsentiert in diesem Jahr auch
die Firma Volansi Inc. (zuerst: Volans-i) in in Concord,
Kalifornien. Das 2015 in San Francisco von Hannan
Parvizian, einem ehemaligen Senior Operations Analysten von
Tesla Inc. und Wesley Guangyuan Zheng, der für den
Elektroautohersteller Lucid Motors gearbeitet hatte, gegründete und
Anfangs von Y Combinator finanzierte Unternehmen entwickelt seine Langstrecken-Drohnen
für Expresslieferungen von Unternehmen zu Unternehmen.
Die Starrflügler-Drohnen des Unternehmens haben eine Spannweite von 2,4 – 3,3 m, können mit bis zu 320 km/h fliegen und dabei bis zu 22,5 kg tragen. Das Modell VOLY M20 hat eine maximale Reichweite von 560 km und erreicht eine Geschwindigkeit von bis zu 120 km/h, abhängig von der Nutzlast und den Wetterbedingungen. Andere Prototypen haben eine Reichweite von 800 km. Was klar auf einen Brennstoffantrieb hinweist – obwohl sich in der gesamten Firmenpräsentation nirgendwo irgendwelche Details darüber finden lassen.
Im Mai 2017 wird in Austin ein 160 km weiter Demonstrationsflug durchgeführt, bei dem ein gut 2 kg schweres Roboterbauteil zu einer Fabrik von Applied Materials transportiert wird. Um die Vorschriften der Federal Aviation Administration (FAA) einzuhalten, das Fluggerät in Sichtweite eines menschlichen Piloten zu halten, muß eine Route gewählt werden, auf der ein FAA-Beamter und die Mitarbeiter der Volansi die Drohne vom Boden aus verfolgen können, während sie 80 km weit fliegt und wieder zurückkehrt.
Volansi engagiert sich 2018 in der humanitären Hilfe, indem es mit Merck & Co., Softbox, AT&T und Direct Relief zusammenarbeitet, um ein drohnengestütztes System zur Lieferung medizinischer Hilfsgüter in Puerto Rico zu entwickeln, und sichert sich die Fluggenehmigungen für das Projekt zwischen den Inseln. Die Entwicklung der Hilfsdrohne gerät 2019 aufgrund der Schäden, die der Hurrikan Dorian auf den Bahamas anrichtet, allerdings ins Stocken.
Das Unternehmen gewinnt den Airmanship Special Award auf dem African Drone Forum 2020 und beginnt zusammen mit Merck im selben Jahr mit Tests für Impfstofflieferungen in North Carolina. Außerdem wird eine zweite Finanzierungsrunde in Höhe von 50 Mio. $ durchgeführt – geleitet von Icon Ventures und mit den bestehenden Investoren Lightspeed Venture Partners und Y Combinator sowie den neuen Investoren Harpoon Ventures und Merck Global Health Innovation Fund. Damit erhöht sich die Gesamtfinanzierung des Startups auf rund 75 Mio. $.
Aktuell sind die wichtigsten Drohnen des Unternehmens die VOLY C10, die 4,5 kg bis zu 80 km transportieren kann, sowie die o.e. VOLY M20. Der Quellenlage nach hat die Firma Volansi nichts mit der o.e. Hybrid-Drohne Volanti zu tun – obwohl die Baustruktur frappierend ähnlich ist.

Im März 2017 wird ein weiteres Fluggerät vorgestellt,
das senkrecht startet und horizontal fliegt. Die mit GPS ausgestattete
autonome Drohne namens U-Lion wurde über einen Zeitraum
von vier Jahren von den Doktoranden Wang Kangli und Ke
Yijie unter der Leitung von Prof. Ben M. Chen an
der National University of Singapore entworfen.
Das Interessante an diesem Konzept: Während die meisten VTOL-Drohnen vier oder mehr Motor/Propeller-Einheiten verwenden, vereinfacht der U-Lion die Dinge, indem er nur zwei Motoren verwendet, die zwei gestapelte gegenläufige Propeller antreiben. Diese Motoren sind auf einem Kardangelenk montiert, so daß der Schubwinkel nach Bedarf geändert werden kann. Damit wird das Flugzeug im vertikalen Flugmodus gesteuert und wechselt zwischen vertikalem und horizontalem Flug.
Darüber hinaus ziehen sich die Flügel der Prototyp-Drohne im vertikalen Flug zurück, was zur Stabilität beiträgt. Einmal im Starrflüglerflug, kann der Winkel der Flügel entsprechend den Flugbedingungen und Missionsanforderungen eingestellt werden, um eine optimale Leistung zu liefern. Laut Angaben der Universität ermöglicht dies Technologie, längere Distanzen als typische VTOL-Drohnen zu fliegen, und ist zudem wendiger als herkömmliche Starrflügler.
Weniger
mit dem Start, als mit der Landung von Starrflügel-Drohnen befaßt sich
ein Projekt der University of Bristol und der britischen
Firma BMT Defence Services, über das ebenfalls im März 2016 berichtet
wird. Die Forscher wollen mit einem neuen Morphing-Flügel und der Intelligenz
einer KI die Fähigkeit nachahmen, wie Vögel landen zu können, die ja
keine langen Landebahnen benötigen. Statt dessen können sie auf einem
Groschen aufsetzen, indem sie in einem ‚Deep Stall‘ genannten Manöver
in niedriger Höhe niederstoßen, dann ihre Flügel nach oben neigen und
ihre Federn ausbreiten, um als Luftbremsen zu wirken.
(Animation)
Direkt von Vogelflügeln inspiriert kann der nun vorgestellte energieeffiziente Morphing-Flügel vorwärts und rückwärts schwingen, um ein Kippmoment zu erzeugen. Zudem können sich die Spitzen der Flügel verdrehen, wodurch das Fluggerät rollen kann. Diese beiden Bewegungsarten bieten weit mehr Manövrierfähigkeit als die üblichen festen Flügel.
Da der Deep Stall ein komplizierter Vorgang ist, bei dem sehr geringe Änderungen der Geschwindigkeit, des Windes, des Winkels und der Position der Flügel zu sehr unterschiedlichen Ergebnissen führen und ein Fehler den Absturz bedeuten kann, wird für die Echtzeit-Berechnung ein künstliches Gehirn gebraucht. Das Team wendet hierfür eine Q-Learning genannte Technik an, bei der eine KI lernt, indem sie ihr ‚Q‘ oder ihr Zufriedenheitsniveau erhöht.
Anstatt Tausende von harten Landungen während dieses Lernprozesses durchzumachen, übt die Drohne zuerst im Himmel mit einem ‚virtuellen Boden‘, der auf eine feste Höhe eingestellt ist. Nach jeder vorgetäuschten Landung startet die Drohne wieder durch, gewinnt an Höhe und versucht es erneut. Nach ungefähr 5.000 Übungsversuchen kann sie dann eine erfolgreiche echte Landung durchführen, völlig ohne Programmierung oder Fernsteuerung.
Das BMT-Projekt ist Teil eines umfassenderen Verteidigungsprogramms namens Autonomous Systems Underpinning Research (ASUR), welches Drohnentechnologie für die britischen Streitkräfte entwickelt. Die besondere Rolle dieses Projekts bestand darin, Drohnen dabei zu helfen, auf Schiffen zu landen, so wie es in der Animation dargestellt wird.

(Grafik)
Ebenfalls im März 2017 erscheint in den Blogs der erste
aufblasbare Hexakopter der Welt. Mit entleerten Armen paßt die kompakte
und robuste Drohne in eine winzige Tragetasche – und sobald sie aufgeblasen
ist, ist sie schwimmfähig genug, um nicht zu sinken, wenn sie versehentlich
ins Wasser stürzt – oder gezielt dort landet.
Das erst in diesem Jahr von Antoine Tournet und Roman Luciani gegründete französische Start-Up Airvada aus Toulouse bietet seine patentierten Fluggeräte in erster Linie für militärische, sicherheitstechnische und industrielle Anwendungen sowie für Such- und Rettungseinsätze in schwierigen Umgebungen an. Da die Drohnen wasserdicht sind, können sie auch bei starkem Regen oder Seegang eingesetzt werden.
Während die Eingeweide der im Laufe von zwei Jahren entwickelten Maschine in einer zentralen, wasserdichten Box eingeschlossen sind, sitzen die Motoren und die faltbaren Propeller auf sechs Schläuchen, die sich in weniger als 45 Sekunden manuell oder mit der mitgelieferten kompakten Elektropumpe zu starren Armen aufblasen lassen.

Darüber hinaus erlaubt die breite Struktur einen stabilen Betrieb sowohl auf Schnee- als auch auf Wasseroberflächen. Die Drohnen sind außerdem äußerst zuverlässig, da bis zu zwei Kammern platzen können, ohne den Flug zu beeinträchtigen.
Im Juli erfolgt die Namensänderung der Firma zu DIODON Drone Technology. Angeboten werden das 1,6 kg schwere Modell DIODON SP20, das entfaltet 55 x 45 x 19 cm mißt (gefaltet: 20 x 28 x 10 cm), eine Höchstgeschwindigkeit von 60 km/h erreicht und bei einer Reichweite von 2 km eine GoPro-Kamera bis zu 20 Minuten lang tragen kann, sowie das 5 kg wiegende Modell DIODON MP40 mit den Maßen 75 x 65 x 20 cm (28 x 40 x 12) und der Fähigkeit, bis zu 30 Minuten lang eine Kompaktkamera mit Gimbal zu tragen. Und natürlich lassen sich auch andere Nutzlasten installieren.
Angekündigt wird zudem ein Modell HP150, das 150 x 150 x 20 cm groß ist und eine stabilisierte, 1,5 kg schwere Kamera bis zu 35 Minuten lang tragen kann. Die Preise der Drohnen werden nicht veröffentlicht. Der Name DIODON bezieht sich im übrigen auf eine exotische Fischart, die in der Lage ist, ihre Aggressoren zu erschrecken.

Bei meiner Recherche stellte sich allerdings heraus, daß es schon früher
aufblasbare Drohnen gegeben hat. Auf der Tianjin International UAV
and Model Aircraft Technology Exhibition im September 2014 in
China stellte ein chinesischer Hersteller zum Beispiel verschiedene
aufblasbare UAVs vor, die Flüge mit niedriger Geschwindigkeit und in
geringer Höhe ausgelegt sind, wie zum Beispiel für Luftaufnahmen, Fernerkundung
und Aufklärung.
Angetrieben von einem hinten in der Mitte montierten Elektromotor, enthält das Einflügel-Design zwei separat aufgeblasene horizontale Querruder mit Aktuatoren zur Verbesserung der Manövrierfähigkeit. Wird die Drohne mit Helium oder Wasserstoff gefüllt, erhöht sich zudem ihre Nutzlast und Reichweite. Weitere Details über diese UAVs oder ihren Hersteller habe ich noch nicht herausfinden können.
Im Mai bewirbt das israelische Unternehmen ParaZero aus
Kiryat Ono auf der Drohnenmesse AUVSI XPONENTIAL
2017 in Dallas erstmals
seine innovativen Drohnen-Fallschirme, die der Firma zufolge so selbstverständlich
werden sollten, wie Airbags in Autos. Im Gegensatz zu den bisherigen
Fallschirm-Systemen, die bei einem Absturz auf die ‚natürliche‘ Entfaltung
der Schirme setzen, nutzt das neue System einen pyrotechnischen Mikrogasgenerator
und Gewichte.
Wie bei einem Airbag sprengt der Mikrogasgenerator des SafeAir Drohnen-Sicherheitssystem den Fallschirm auf, in dessen Rand die Gewichte eingenäht sind, worauf die 2014 gegründete Firma nach eigenen Angaben ein Patent hat. Diese Gewichte sorgen dafür, daß sich der Fallschirm nicht verheddert, sondern sich gleichmäßig in alle Richtungen öffnet. Dabei dauert das Öffnen nur den Bruchteil einer Sekunde (genau: 0,0207 sec), womit der Schirm auch bei einer geringen Fallhöhe Wirkung entfalten kann.
Die Auslösung des Fallschirms kann zudem nicht nur bei einem plötzlichen Verlust an Höhe erfolgen, sondern auch wenn ein Motor der Flugdrohne stoppt, der Akku zur Neige geht, die Lage der Drohne kritisch wird, ein Hacking erkannt oder das Funksignal gestört wird, extreme Windbedingungen die Steuerung unmöglich manchen oder die Drohne in einen Bereich vordringt, in dem sie gar nicht fliegen darf. Letzteres ist besonders für Behörden interessant, die Drohnen von Regierungseinrichtungen oder Flughäfen fernhalten möchten.
Nach Auslösung des Fallschirms werden akustische und optische Warnsignale abgegeben, um Menschen am Boden zu warnen. Beim aktuellen Update Mitte 2018 nennt das Unternehmen knapp 1.500 verkaufte Systeme, die sich auf verschiedenen Drohnen-Gewichtsklassen erstrecken.

Firma Drone Rescue
Im Oktober 2018 folgen weitere Fallschirme, die von
der österreichische Firma Drone Rescue auf der Intergeo
2018 in Frankfurt öffentlich vorgeführt werden. Die Fallschirmmodule DRS-5 und DRS-10 sind
für Drohnen unterschiedlicher Größe gebaut, wobei der DRS-5 Drohnen mit
einem Gewicht von bis zu 8 kg tragen kann, während der DRS-10 für Drohnen
mit einem Gewicht von 5 – 20 kg gebaut wird.
Obwohl die Fallschirme nach Angaben des Unternehmens zum ersten Mal vorgeführt werden, sind sie seit über einem Jahr auf dem YouTube-Kanal und der Facebook-Seite von Drone Rescue zu sehen. Beide Modelle bestehen aus einem Kohlenstoffkäfig, in dem der Fallschirm sowie Sensoren und Steuerungen untergebracht sind, die unabhängig von der Drohne arbeiten. Zudem kommt das System ganz ohne explosive pyrotechnische Lösungen aus.
Die Technologie kann erkennen, wenn eine Drohne in Schwierigkeiten ist, und den Fallschirm innerhalb von Millisekunden nach Auftreten eines Problems elektronisch auslösen – z.B. wenn der Pilot den Funkkontakt zur Drohne verloren hat. Beim Auswurf werden außerdem die Motoren der Drohne gestoppt, um sicherzustellen, daß die Rotoren nicht die Leinen des Fallschirms durchschneiden oder bei der Notlandung jemanden verletzen.
Das System umfaßt außerdem einen Black Box-Flugdatenschreiber, der sowohl GPS-Daten als auch die Höhe und die Beschleunigung der Drohne überwacht. Die Daten werden über einen Online-Dienst von Drone Rescue zur Verfügung gestellt, das als Hauptanwendung für die Black Box und ihre Daten einen möglichen Versicherungsanspruch nennt. Die Fallschirme sollen Ende des Jahres an die ersten Kunden ausgeliefert werden.
Ebenfalls im Mai 2017 ist zu erfahren, daß Forscher
des Langley Research Center der NASA in Virginia ein
System entwickelt haben, das einer Drohne bei der Fehlersuche helfen
kann: Kleine UAVs können damit eigenständig bestimmen, wann sie nicht
richtig funktionieren, um umgehend einen sicheren Landeplatz zu suchen.
Das von Trish und Lou Glaab erfundene System namens Safe2Ditch ist für vollständig autonome Fluggeräte entwickelt worden und nutzt Softwarealgorithmen, um während des Fluges kontinuierlich selbstdiagnostische Überprüfungen durchzuführen und Batterie- oder Motorprobleme, Oberflächen- oder Strukturfehler und sogar Ladungsverschiebungen zu erkennen, die das Fluggleichgewicht stören können.
Der Prototyp besteht aus einer kleinen Platine, die per Kabel mit dem Autopilot und der Kamera der Testdrohnen verbunden ist und die Hardware der Drohne verwenden kann, um die Landezone zu beurteilen. Werden irgendwelche Probleme entdeckt, schätzt das System ab, wie viel länger das Fluggerät in der Luft bleiben kann – und kann auch die Art und Weise anpassen, wie die Drohne fliegt, so daß diese ein wenig länger ‚hinken‘ kann.
Das System durchsucht zusätzlich eine Datenbank nach Orten wie Feldern, Parkplätzen oder Parks, welche die Drohne innerhalb dieser Zeit erreichen und wo sie sicher landen könnte. Basierend auf diesen Informationen würde das Fluggerät dann autonom eine Landung an dem nächstliegenden Ort durchführen, wobei Sensoren verwendet werden, um zu bestätigen, daß niemand darunter steht.
Im gleichen Monat wird berichtet, daß Forscher des Georgia Institute
of Technology (Georgia Tech) um Magnus Egerstedt Maßnahmen
zur Kollisionsvermeidung unter autonomen Luftfahrzeugen
entwickeln. Im Gegensatz zu Bodenrobotern, die eingebaute Sicherheitszonen
um sie herum haben, um Zusammenstöße zu verhindern, müssen Quadrokopter
einen zylindrischen ‚Nicht berühren‘-Bereich besitzen, um zu vermeiden,
daß sie durch den Luftstrom anderer Drohnen in Mitleidenschaft gezogen
werden. Die Drohnen des Georgia Tech tragen deshalb grundsätzlich ‚virtuelle
Zylinder‘.

Sicherheit mag an erster Stelle stehen, aber es ist nicht die einzige Sorge: Wenn Roboter nämlich angewiesen werden, sich zu konservativ zu verhalten, werden sie letztendlich entscheiden, daß die sicherste Vorgehensweise darin besteht, sich überhaupt nicht zu bewegen. Es muß daher ein Gleichgewicht zwischen Sicherheit und Effizienz herrschen, weshalb die Forscher den minimalen sicheren vertikalen Abstand zwischen den Drohnen auf 60 cm festlegen und dann Algorithmen entwickeln, die diesen dabei helfen, ihre Flugform anzupassen, ohne daß die ‚Zylinder‘ aneinander stoßen.
Doch so autark sie auch werden mögen, es wird immer Zeiten geben, in denen Menschen und Drohnen interagieren müssen. Hierfür könnte ein autonomer Blimp, der langsam, sicher und mit Gesten- und Gesichtserkennung ausgestattet ist, die besser passende Variante sein. Schließlich bringt es eine Menge Probleme mit sich, eine normale Drohne in der Nähe von Menschen zu fliegen. Demgegenüber nähern sich die Menschen viel eher einem sich langsam bewegenden Blimp, der wie ein Spielzeug aussieht.
Die Blimps bestehen aus einem 3D-gedruckten Rahmen, der an einem heliumgefüllten Ballon mit einem Durchmesser von 46 cm oder 91 cm befestigt ist. Um Gesichter und Gesten zu erkennen, sind in die Rahmen Sensoren und eine Kamera eingepaßt. Da sie auch in Innenräumen relativ sicher fliegen, könnten diese ,intelligenten Flugkörper‘ zu perfekten Helfern in Geschäften oder an anderen öffentlichen Orten werden. Mehr über LTA-Drohnen findet sich im Kapitelteil Solar-Luftschiffe und Solar-Ballone (s.d.).
Und noch eine weitere technische Entwicklung wird im Mai 2017 bekannt,
als die ETH Zürich ein entsprechendes YouTube-Video
veröffentlicht. Der Beitrag selbst war schon im vergangenen Jahr auf
der IEEE International Conference on Robotics and Automation (ICRA) in
Stockholm vorgestellt worden (‚Design, Modeling and Control of an Omni-Directional
Aerial Vehicle‘).
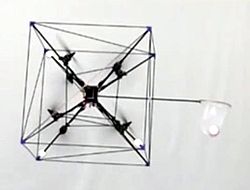
Das schon mehrfach erwähnte Team um die Forscher Dario Brescianini und Raffaello D’Andrea, das Anwendungen erforscht, in denen Drohnen physisch mit ihrer Umgebung interagieren, Objekte manipulieren oder Strukturen aufbauen, zeigen mit ihrem neuen Fetching Omnicopter ein Design, bei dem die Rotoren in unterschiedlichen Winkeln positioniert sind.
Dies ermöglicht es der Drohne, ihren Schub in drei Dimensionen unabhängig voneinander zu steuern, so daß sie in jeder Ausrichtung fliegen kann. Bei herkömmlichen Multirotor-Drohnen, deren Rotoren auf derselben horizontalen Ebene positioniert sind, begrenzt diese mechanische Einfachheit den Schubvektor in eine Richtung. Um das Potential des Designs zu demonstrieren, zeigt ein Prototyp seine Fähigkeit, ihm zugeworfene Bälle mit einem kleinen, an einen Arm befestigten Fangnetz regelrecht elegant aus der Luft zu pflücken.
Zur präzisen Steuerung der Drohne wird ein speziell entwickelter Trajektoriengenerator-Algorithmus eingesetzt, der in der Lage ist, rund 500.000 Flugbahnen pro Sekunde zu generieren, die die Drohne in einem bestimmten Zeitraum von ihrer Ausgangsposition zur gewünschten Endposition führen. Damit sagt der Algorithmus die Flugbahn des Balls voraus, sobald er die Hand des Werfers verläßt, und wählt in nur 20 Millisekunden den weichsten, dem die Drohne folgt, um den Ball im Netz zu fangen.

Interessanterweise wird schon Anfang Juni 2017 von einem
außergewöhnlichen Hexakopter namens Voliro berichtet,
an dem elf Studenten der ETH Zürich neun Monate lang
gearbeitet haben. Die Drohne, die überall hinkommt, wird von sechs frei
drehbaren Rotoren angetrieben, existiert bislang aber nur nur ein Prototyp.
Jeder der sechs an Bord befindlichen Rotoren läßt sich um 360° drehen, womit Flugkunststücke möglich sind, die bisher noch nicht realisiert werden konnten. Die Drohne kann beispielsweise über Kopf, im 45°-Winkel oder vertikal geflogen werden, wobei sich der Hexakopter in jeder Lage exakt steuern läßt.
Das Einsatzspektrum ist vielfältiger Natur. So kann die neuartige Drohne prinzipiell für Wartungs-, Inspektions- oder Sichtungsarbeiten Verwendung finden und dabei Wände auch in aufrechter Position abfliegen. Eine kommerzielle Produktion ist bereits geplant, scheint aber bis Ende 2018 nicht realisiert worden zu sein.

Im Jahr 2019 wird von Mina Kamel und Timo Müller die Firma Voliro AG als Spin-off der ETH gegründet und bringt eine weiterentwickelte Version des Flugroboters auf den Markt, der speziell für industrielle Inspektionen geeignet ist und den Namen Voliro T trägt. Durch die Kipprotor-Technik kann die Drohne auch kopfüber eingesetzt werde, ebenso wie sie problemlos Oberflächen berühren kann.
Im April 2020 stellt die ETH eine weitere Kipprotor-Drohne mit diesmal zwölf koaxialen Rotoren vor, wobei jedes Rotorenpaar an einem Arm befestigt ist, der sich um 360° drehen kann. Auch dieses Modell kann in jeder Lage fliegen und schweben. Interessant ist, daß Mina Kamel auch an diesem Projekt beteiligt ist.
Ebenfalls im Mai 2017 informieren Forscher des US
Naval Research Laboratory (NRL) darüber, daß sie an einem unbemannten
Luftfahrzeug arbeiten, das die eine Bord-Photovoltaik-Anlage mit einem thermischen
Suchalgorithmus kombiniert, um lang andauernde, autonome Langstrecken-Segelflüge
zu ermöglichen. Dies geschieht durch das aktive Aufspüren und Umkreisen
von in der Nähe befindlichen Aufwinden, um Höhe zu gewinnen, die dann
verwendet wird, um zu einer anderen Auftriebsquelle zu gleiten, wo der
Prozeß wiederholt wird.

Moderne Hochleistungssegler können auf diese Weise an einem einzigen Tag weit über 2.000 km zurücklegen, und dies – abgesehen von einem kurzen Start mit einem Hilfsmotor oder einem Flugzeugschlepper – ausschließlich mit Solarenergie als Quelle des Auftriebs. Die Herausforderung war nun, die dabei umgesetzte Technik des menschlichen Piloten in ein autonomes, unbemanntes Flugzeug zu übersetzen und dieses Tag und Nacht am Laufen zu halten.
Die praktische Verwirklichung erfolgt mit einem SB-XC Segelflugzeug der Firma RnR als Plattform, dessen auswechselbare Flügel zwei verschiedenen PV-Systeme zum Vergleich tragen. Im Oktober 2016 wird ein Testflug mit SunPower-Solarzellen durchgeführt, bei dem das UAV für 10 Stunden und 50 Minuten in der Luft bleibt. Dabei können 40 % des Fluges mit ausgeschaltetem Motor verbracht werden. In einem anderen Test, der nur minimal länger verläuft, werden von Alta Devices entwickelte Solarzellen verwendet.
Das sogenannte ‚Solar Photovoltaic and Autonomous Soaring Base‘-Projekt wird vom Expeditionary Energy Office (E2O) des Marine Corps unterstützt.
Interessanterweise wird im August 2017 gemeldet, daß
auch Microsoft daran arbeitet, einer KI beizubringen
wie man ein autonomes Flugzeug steuert, das ausschließlich von dem Naturphänomen
der aufsteigenden Thermik angetrieben wird. Mit Daten
von Sensoren, die Lufttemperatur, Windrichtung, Höhe und andere Meßwerte
überwachen (zusätzlich zu den Geschwindigkeits- und Standortdaten von
GPS), kann der KI-Pilot erkennen, wenn das Segelflugzeug plötzlich an
Höhe gewinnt und anzeigt, daß es eine steigende Temperatur gefunden hat.
Der hierbei genutzte Modellsegeler mit einer Spannweite von 5 m, der als ‚unendliche Segelflugmaschine‘ bezeichnet wird, hat allerdings keinen PV-Range-Externder, wie das Modell des NRL. Und er ist immer noch auf einen Elektromotor angewiesen, um überhaupt vom Boden zu kommen. Zudem werden die Servos, welche die Klappen und das Querruder so bewegen, daß sie das Segelflugzeug in Richtung auf eine Thermik lenken und dort kreisen lassen, alle von einer Bordbatterie angetrieben.
Aus diesem Grund sind auch hier Solarzellen auf den Flügeln angedacht, ebenso wie in den Rumpf integrierten Windgeneratoren, um die gesamte benötigte Leistung bereitzustellen.
Ende Mai 2017 zeigen Wissenschaftler des Charles
Stark Draper Laboratory und des Howard Hughes Medical
Institute (HHMI) in einem Video mit winzigen elektronischen
Rucksäcken bestückte Cyborg-Libellen, die sich damit
fernsteuern lassen. Im Fall der DragonflEye wird das Insekt durch Lichtimpulse gesteuert,
die in bestimmte Neuronen im Gehirn des Flugkäfers geleitet werden, so
daß ein menschlicher Pilot es wie eine Drohne steuern kann. Bei einer
späteren Recherche stellt sich heraus, daß die ersten Berichte darüber
bereits im Januar erschienen sind.

Das letztendliche Ziel des Teams besteht darin, die winzigen Cyborgs zu nutzen, um die Bestäubung zu steuern, winzige Nutzlasten zu liefern oder unsichere Gebiete zu erkunden. Denn je kleiner eine Drohne ist, desto mehr Orte können leicht angeflogen werden. Für ihre Einsätze ist die Libelle daher mit einer Sammlung winziger Sensoren ausgestattet, die es ermöglichen, Daten zu sammeln oder Aufnahmen an Orten durchzuführen, zu denen Menschen nicht sicher hingehen können.
Die größte Hürde beim Bau von winzigen Drohnen ist jedoch, sie mit Energie zu versorgen. Ein kleines Fluggerät ist nur stark genug, um eine kleine Batterie zu tragen, was seine Flugzeit dramatisch begrenzt. Mücken und anderen Insekten können dagegen stundenlang herumfliegen, bevor sie wieder auftanken müssen. Und die Elektronik der DragonflEye wird durch winzige integrierte Solarzellen versorgt.
In dem Video ist zu sehen, wie die solarbetriebenen Rucksäcke an den Insekten befestigt werden – und wie die ferngesteuerte Drohne, die auf einer lebenden Libelle basiert, zum ersten Mal einen Flug macht, wenn auch in einer geraden Linie, da die Forscher ihr Kontrollsystem noch perfektionieren müssen, bevor die Cyborgs zum ultimativen Spionage-Werkzeug werden und verwirklichen, was die CIA bereits in den 1970er Jahren mit einem Mini-Roboter erfolglos versucht hatte. Ich habe darüber in der Jahresübersicht 2011 berichtet (s.d.).
Im Juni 2017 werden während der internationalen Commercial
UAV Expo Europe in Brüssel die Gewinner des diesjährigen Wettbewerbs Drone
Hero Europe bekanntgegeben. Der erste Platz geht diesmal an
das Projekt Droneradar von Pawel Korzec aus
Polen, während der uns bereits bekannte Massoud Hassani für
seine Minen-Drohne Mine Kafon den zweiten Platz belegt.
Ebenfalls im Juni 2017 berichten die Fachblogs über
ein neu entwickeltes Navigationssystem des
GPU-Herstellers Nvidia, das auf visueller Erkennung und Computerlernen
beruht, um sicherzustellen, daß sich Drohnen nicht im Wald verfliegen.
An dem Jet Learning-Modul Jetson TX, das mit visuellen
Daten von zwei Kameras gespeist wird, arbeitet das Unternehmen bereits
seit mehreren Jahres, es wurde im November 2015 erstmals
öffentlich präsentiert und war ursprünglich darauf ausgelegt, bei Rettungseinsätzen
Waldwegen zu folgen, um z.B. auf gefallene Wanderer oder Sturmschäden
zu achten.
Damals hatte die kommerzielle Drohnenfirma Kespry aus Silicon Valley eine Prototyp-Drohne demonstriert, welche die Nvidia-Technologie zur künstlichen Intelligenz nutzt, um Objekte zu erkennen und mehr über ihre Umgebung zu erfahren.
Inzwischen glaubt das Nvidia-Team jedoch, daß die Tiefflug-Drohne ihren Anwendungsbereich überall dort ausweiten könnte, wo GPS weniger zuverlässig oder überhaupt nicht verfügbar ist, einschließlich Canyons und überfüllter Stadtlandschaften, oder auch zur Überprüfung von Bahngleisen bis hin zu Lagerbeständen in einem Lagerhaus. Das System könnte sogar angepaßt werden, um unter Wasser beschädigte Kabel zu suchen. Alles, was die Drohne braucht, ist ein Weg oder Verlauf, den sie visuell erkennen kann.
Langfristiges Ziel des Projekts ist es, Koordinaten in das kamerabasierte Navigationssystem eines Bot zu programmieren und es dann selbständig agieren zu lassen. Aktuell wird Software entwickelt, die Roboterhersteller herunterladen und verwenden können, um ihre eigenen Kreationen zu konstruierten, die ausschließlich mit visuellen Daten navigieren.

des MIT
Einen anderen Ansatz, über den ebenfalls im Juni berichtet wird, verfolgt
ein Team des Labors für Informatik und Künstliche Intelligenz (CSAIL)
am MIT, das einen ‚Schwarm‘ autonomer Drohnen entwickelt,
die sowohl auf dem Boden fahren als auch in der Luft fliegen können.
Zwar sind Flugdrohnen schnell und lassen sich nicht von unebenem Gelände
stören, doch zum einen benötigt bodenbasiertes Reisen viel weniger
Energie als ein Flug, und zum anderen können kleine Radfahrzeuge auch
in engsten Räumen manövrieren.
Unter der Leitung der CSAIL-Direktorin Daniela Rus und des Doktoranden Brandon Araki bauen die Forscher acht Quadrokopter, die zusätzlich mit angetriebenen Rädern ausgestattet sind. Obwohl das zusätzliche Gewicht der Räder ihre maximale Flugreichweite um 14 % verringert, wird dies als lohnender Kompromiß für die Effizienz betrachtet, welche die Drohnen durch die Fähigkeit, sich auf dem Boden zu bewegen, gewinnen würden.
Um sie zu testen, werden die Drohnen in eine Miniatur-Modellstadt gebracht und mit der Aufgabe beauftragt, von einem Parkplatz in einem Gebiet zu einem entfernten anderem zu reisen. Zwischen den beiden Punkten befinden sich Straßen, zusammen mit einer Lücke, die überflogen werden muß, sowie spezifizierte Flugverbotszonen. Von einem Computer mit Pfadplanungsalgorithmen gesteuert können alle acht Drohnen ihre Fahrten gleichzeitig durchführen, ohne auf dem Boden oder in der Luft miteinander zu kollidieren.

vor dem Start
Passend zu dieser Meldung demonstriert die staatseigene China
Electronics Technology Group Corp. (CETC) im Juni 2017 ein
Manöver mit einem Schwarm aus 119 Starrflügel-Drohnen des
Typs Skywalker X6, das als die bislang weltweit größte
Drohnenschwarm-Übung gilt. Damit wird auch der bisherige Weltrekord (desselben
Unternehmens) im vergangenen Jahr mit 67 Drohnen gebrochen. Bis 2015 waren
noch die USA in der Drohnenschwarm-Technologie führend.
Der Zweck dieser Flüge ist es, Schwarmintelligenz oder synchronisierte Kommunikation zwischen den Drohnen zu erforschen. Starrflügel-Drohnen haben wiederum die Fähigkeit, längere Strecken zu fliegen als ein durchschnittlicher Quadrokopter, da sie dank ihrer Gleitfähigkeit auch länger in der Luft bleiben können.
Im Gegensatz zu den o.e. Drohnen-Schwärmen von Intel, die von einem Computer gesteuert – quasi blind – vorprogrammierte, synchronisierte Flugbahnen fliegen, können die 119 CETC-Drohnen zwar auch von einer Person gesteuert werden, doch sie agierten mehr wie ein Vogelschwarm, indem sie Software nutzen, um miteinander zu kommunizieren. Zudem haben sie die Fähigkeit, sich gegenseitig zu spüren und zu meiden.
Eine große Menge an koordinierten Drohnen kann für viele verschiedene Anwendungen verwendet werden. Normalerweise kann ein allgemeiner Befehl wie ‚Suche in einem bestimmten Bereich‘ eingegeben werden. Sobald die Anweisung empfangen wird, koordiniert sich der Drohnen-Schwarm selbständig miteinander, um das vorgegebene Ziel zu erreichen.

(Modell)
Ebenfalls im Juni 2017 verbreiten die Blogs Bilder und
Informationen über eine ganz besondere Drohne, die ein Team kanadischer
Wissenschaftler am Createk Design Lab der Université de Sherbrooke in
Quebec entwickelt hat.
Im Vergleich zu Multikoptern können Starrflügler dank ihrer effizienteren Form in der Luft sehr lange Strecken zurücklegen. Ein Nachteil dieser Drohnenform ist jedoch der Platz, der benötigt wird, um sie zu starten, zusammen mit einer Art Mechanismus – meist einem Katapult –, um dies zu bewerkstelligen.
Als Lösung hatten die Wissenschaftler bereits im April eine Drohne präsentiert, die auf dem Wasser landen und von dort aus auch wieder starten kann, wobei sie sich zwischen den Flügen mit Solarenergie auflädt.
(Grafik)
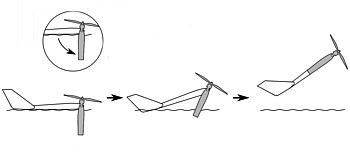
Tests mit dem aus Polystyrol und Kohlefaser gefertigten SUWAVE (Sherbrooke University Water-Air Vehicle) im Sommer 2016 hatten gezeigt, daß es die Stöße einer Wasserlandung aushalten kann, ebenso wie der clevere Mechanismus funktioniert, den die Drohne verwendet, um sich wieder in die Luft zu katapultieren.
Der Schlüssel dafür ist ein beweglicher, wasserdichter Mittelkörper, der die Batterie und den Motor enthält und am Propeller festgemacht ist. Bei der horizontal auf dem Wasser liegenden Drohne wird diese Komponente ausgehakt, wodurch sie aufgrund ihres Gewichts senkrecht im Wasser hängt. Sobald das Fluggerät bereit ist, wieder zu fliegen, wird Schub angewandt, der das Flugzeug aufwärts und vorwärts zieht. Der Mittelkörper schwingt dann passiv in seine Ruheposition zwischen den Flügeln zurück und erlaubt der Drohne, wie ein normaler Starrflügler weiterzufliegen. Die Reihenfolge des vertikalen Starts ähnelt damit der von Stockenten.

Die Motivation hinter dem SUWAVE besteht lediglich darin, die Reichweite von Starrflügler-Drohnen durch die Verwendung von Seen als Boxenstopps zu erweitern. Immerhin sind ungefähr 9 % von Kanadas 10 Mio. km2 mit Seen bedeckt, und die Forscher berechnen, daß ihre 584 g schwere Drohne das ganze Land von Nord nach Süd durchqueren könnte, mit einer Reichweite von nur 20 km.
Das Projekt befindet sich noch im Prototypenstadium. Nach dem erfolgreichen Test der Start- und Landefähigkeiten umfassen die nächsten Schritte die Entwicklung einer autonomen Flugsteuerung und den Einbau von Solarzellen, wie sie auf dem abgebildeten Modell bereits zu sehen sind, damit die Drohne in Bewegung bleiben kann. Die Anwendungen erstrecken sich auf die Überwachung von Waldbränden, Such- und Rettungseinsätze oder das Sammeln von Wasserproben.
Im Juli 2017 stellen Wissenschaftler des Schweizer
Forschungszentrums Empa eine
neue Technologie vor, die auf einer anderen Art von Gesten-Steuerung basiert,
als die bisherigen Systeme, die hauptsächlich auf visuellen Sensoren
(Kameras) beruhen. Ein Team um Frank Clemens hat statt
dessen einen Sensor aus piezoresistiven Fasern entwickelt und ihn in
ein Uhren-Armband integriert, das, am Handgelenk getragen, feinste Bewegungen
der Hand registriert.
Die in einem 3-D-Drucker gedruckte piezoresistive Faser ist elektrisch leitend, erkennt eine Deformation, mißt die leichteste Bewegung am Handgelenk und wandelt sie in ein elektrisches Signal um, das dann von einem Endgerät ausgelesen wird. In Zusammenarbeit mit den Firmen STBL Medical Research AG und Idezo gelingt es dem Team, den Sensor so zu programmieren, daß sich damit eine Drohne mit nichts weiter als Handbewegungen steuern läßt: Ein Wink nach links, die Drohne schwenkt nach links. Ein Wink nach rechts, sie steuert nach rechts. Mit der Hand eine Faust formen, und sie landet sanft auf dem Tisch.
Der Algorithmus, der die Übersetzungsarbeit zwischen Sensorik und Drohnensteuerung übernimmt, wird derzeit im Rahmen einer Bachelorarbeit an der Fachhochschule Bern unter der Leitung von Stampfli Marx weiter verfeinert, um auf noch einfachere Gestik reagieren und auch ganze Bewegungsfolgen erkennen zu können. Zweimal kurz hintereinander die Faust ballen würde dann ein anderes Kommando auslösen als einmal kurz und einmal lang.
Zudem untersucht eine ETH-Studentin in ihrer Semesterarbeit die Möglichkeit, den piezoresistiven Sensor in ein Pflaster zu integrieren. Es bräuchte dann nicht einmal mehr ein Armband, sondern nur noch ein kaum sichtbares Pflaster am Handgelenk, um diverse Interaktionen mit technischen Geräten und Robotern durchzuführen.

Telekinetic Drone
Interessanterweise wird bereits im November von KD Interactive die
Spielzeugdrohne KD Aura Interactive Gesture Drone (o.
Aura Telekinetic Drone) auf den Markt gebracht, die mittels einer Handschuh-Gestensteuerung
geflogen wird. Die Bedienung des Handschuhcontrollers GestureBotics soll
sanft und intuitiv sein und ermöglichen, die Drohne in der Luft einfach „zu
schieben und zu ziehen“.
Die Drohne, deren patentierte Technologie von LocoRobo Innovations entwickelt wurde, wird später nicht mehr hergestellt, dafür gibt es andere günstige Modelle, deren Preis bei ca. 40 € liegen (Stand 2021).
Anfang Juni 2017 erscheinen in der Presse Berichte
über eine große chinesischen Solar-Drohne, die für Monate, wenn nicht
gar Jahre in der Luft bleiben könnte. Das Flugzeug namens Caihong
T4 (CH-T4 o. Rainbow T-4), das wie ein riesiger fliegender
Flügel aussieht, wird als eines der modernsten unbemannten Flugzeuge
seines Typs beschrieben.
Während eines Testfluges auf einem nicht genannten Flughafen in Nordwestchina erreicht die von der China Academy of Aerospace Aerodynamics (CAAA) entwickelte solarbetriebene Drohne eine Höhe von 65.000 Fuß (> 20.000 m), was einem inländischen Rekord entspricht. Sie startet am Morgen und kehrt spätabends zum Flughafen zurück.

Den mit 29.524 m noch immer gültigen Höhenrekord für eine solarbetriebene Drohne hält der von AeroVironment Inc. entwickelte Prototyp Helios seit dem August 2001 (s.d.).
Die Flügelspannweite der chinesischen Drohne, deren Hauptkomponenten aus Kohlefaser und Kunststoff gefertigt sind, beträgt 40 m, das maximale Abfluggewicht 450 kg. Mit ihren acht Propellern soll sie eine Fluggeschwindigkeit von bis zu 200 km/h erreichen. Um die Wichtigkeit der Entwicklung zu betonen, weisen die Konstrukteure darauf hin, daß eine brennstoffbetriebene Militärdrohne normalerweise bis zu einer maximalen Höhe von 8.000 m fliegen kann, während nur eine Handvoll der besten Überwachungsdrohnen eine Höhe von 18.000 m erreichen kann.
Die Konstrukteure und Ingenieure werden aber noch mehrere Jahre brauchen, um das Flugzeug zu verbessern und zu testen, bevor es an die Benutzer ausgeliefert wird. Potentielle Käufer sind vor allem Regierungsbehörden sowie Unternehmen, die in den Bereichen Kommunikation, Internet, Erdbeobachtung, Notfallhilfe und Meeresüberwachung tätig sind.
Während der Konferenz ‚Robotics: Science and Systems‘ Ende Juni 2017 in
Pittsburgh berichtet ein weiteres MIT-Team um die Professoren Sertac
Karaman und Vivienne Sze über die Entwicklung
eines neuen, winzigen Computerchips, der in einer Drohne
in der Größe einer Flaschenkapsel installiert werden kann, aber Bilder
aufnehmen und das Gerät mit einem Minimum an Energie navigieren kann.
Die heutigen durchschnittliche Chip sind dagegen noch immer Daumennagel-groß
und verbrauchen bis zu 30 W Strom.
Anstelle des herkömmlichen Ansatzes, den Chip zuerst und die Algorithmen danach zu entwickeln, folgt das Team einen Ansatz namens Navion, bei dem die Algorithmen für den Chip und der Chip selbst gemeinsam entworfen werden. Ein Aspekt dabei bestand darin, einen existierenden Algorithmus zu zerlegen, der für die Bestimmung der Position der Drohne im Raum verantwortlich ist (ego-motion). Verschiedene Versionen dieses Algorithmus wurden in einem sehr einfachen programmierbaren Chip namens Field-Programmable Gate Array (FPGA) installiert, was es den Chipentwicklern ermöglichte, den effizientesten Prototyp zu finden, der unter Beibehaltung eines akzeptablen Genauigkeitsniveaus die Anzahl der Gatter und damit die benötigte Leistung reduziert.
Mit der Hilfe von Simulationen aus aufgezeichneten Drohendaten sowie von Flügen mit Bewegungssteuerung wird letztlich ein Chip hergestellt, der Strom spart, indem er den externen Speicher eliminiert und die Daten so verarbeitet, daß gespeicherten Informationen sofort gelöscht werden können, wenn sie nicht mehr benötigt werden. Das Ergebnis ist ein Chip, der 20 Bilder pro Minute verarbeiten kann, während er die Drohne im Raum ausrichtet, und dabei nur 2 W Leistung und zwei MB Speicher benötigt.
Das Team hofft, den Stromverbrauch in Zukunft mittels verbesserter Algorithmen und einer ‚anwendungsspezifischen integrierten Schaltung‘ auf einige Hundert Milliwatt reduzieren zu können, wodurch ein solcher Chip eines Tages dazu dienen könnte, Drohnen in Insektengröße für Such- und Rettungseinsätze sowie andere Anwendungen herzustellen.

Im Juli stellen Studenten der Singapore University of Technology
and Design (SUTD) den Prototyp eines hybriden Fluggeräts vor,
das insofern einigen Vorgängern ähnelt, da es senkrecht starten, schweben
und auch wie ein Starrflügler fliegen kann. Es sollte nicht mit der von
Airbus im Mai 2016 vorgestellten gleichnamigen Drohne
verwechselt werden.
Die Besonderheit der Drohne namens THOR (Transformable HOvering Rotorcraft) ist, daß ihr Design auf dem bereits 1913 vorgestellten Konzept des Monokopters basiert, welches zwar strukturell effizient ist, da der gesamte Rahmen genutzt wird, um Auftrieb zu erzeugen, sich in der tatsächlichen Umsetzung aber als ziemlich unpraktisch erwies, da das Fehlen von Gegenrotationssystemen bedeutet, daß sich der Pilot und die Fracht mit dem Rest des Flugzeugs drehen müßten.
Bei kleinen Drohnen sieht die Sache jedoch anders aus, und das STUD-Team läßt sich von fliegenden Samara-Samen inspirieren – ganz ähnlich wie die US-Firma Lockheed Martin, die schon 2006 mit der Entwicklung eines UAV-Monokopter-Modells namens Samarai begonnen hat, über die ich in der Jahresübersicht 2009 berichtet habe, als es um ein ähnliches Konzept der University of Maryland ging (s.u.).
Im Gegensatz zu jener Einzelflügel-Variante, nutzt das Modell der STUD eine zweiflügelige Version, bei der die gegenüberliegenden Flügel im rechten Winkel zueinander montiert sind und deren Ausrichtung sich beim Übergang vom Helikopter-Schwebeflug zum Starrflügler-Flug dreht.
Die Studenten entwickeln zudem ein passives System, um basierend auf dem Flugmodus das Gewicht zu verschieben. Beim Wechsel vom Schweben zum Horizontalflug oder umgekehrt, wird die Zentrifugalkraft, die an dem Wechsel beteiligt ist, dazu verwendet, den Ballast in eine Position zu bewegen, die das Fluggerät im Gleichgewicht hält.

Vielleicht noch interessanter ist eine Drohne, die ebenfalls im Juli
in den Blogs erscheint und auf den Entwickler Dirk Brunner aus
München zurückgeht - was man schon aufgrund der Farbgebung erkennen
kann -, der im Februar 2016 einen
Guiness-notierten Weltrekord aufstellte, als er seinen Quadrokopter
in weniger als 4 Sekunden um 100 m steigen ließ (s.d.).
Brunners neuer Streich ist ein Fluggerät, das mit lediglich zwei Motoren, die je ein Rotorblatt bewegen, komplett steuerbar ist. Dahinter steckt eine verblüffend einfache Idee – aber auch jede Menge aufwendige Regelungstechnik. Konventionelle Quadrokopter bleiben auf der Stelle und variieren nur die Höhe, wenn die vier Rotoren mit gleicher Drehzahl laufen, und über abweichenden Schub einzelner Motoren kippt das Gerät und nimmt Fahrt in der Horizontalen auf.
Bei dem neuen DuoCopter sind die beiden Rotoren übereinander angebracht und haben jeweils nur ein Rotorblatt. Für die Stabilisierung und Steuerung wird deren Geschwindigkeit im Verlauf einer Drehung fein dosiert variiert, während ein Ausgleichsgewicht dabei die Unwucht verhindert. Die Herausforderung bei der Entwicklung bestand dem Erfinder zufolge vor allem darin, den reichlich komplexen Regelungsalgorithmus in Echtzeit auf Standard-Komponenten zum Laufen zu bringen.
Die ungewöhnliche Auslegung der Flugmaschine bietet viele Vorteile, so z.B., daß die von den Rotoren bewegte Luft ungehindert nach unten strömen kann, da ja keine Arme im Weg sind, an deren Ende Motoren sitzen, wie bei klassischen Quadrokoptern. Da dem Regelungsalgorithmus zudem stets die Positionen der Rotorblätter bekannt sind, kann eine Kamera, die durch den Propellerkreis zielt, so synchronisiert werden, daß sie bei jedem einzelnen Bild freie Sicht hat.
Nicht zuletzt soll es sogar möglich sein, die Bremsenergie der beiden Motoren, die durch die Regelung pro Umdrehung anfällt, über einen modifizierten Motor-Controller wieder in den Akku zurückzuspeisen. Und denkt man die Technik weiter, lassen sich wahrscheinlich sogar Fluggeräte mit nur einem Motor und einem Rotorblatt bauen. Auf der Seite research-drone.com ist eine ausführlichere Funktionsbeschreibung zu finden – und unter dem Stichwort DuoCopter gibt es im Netz YouTube-Videos kurzer Testflüge zu sehen.
An dieser Stelle soll aber auch auf die Seite von Brunners Ingenieurbüro hingewiesen werden, wo sich u.a. ein bemerkenswerten Artikel über Gefährdung, Risiko und Verletzungen bei unsachgemäßen Drohnenbetrieb befindet (Link).

Alexis Lussier Desbiens, dessen Team an der Stanford
University bereits im Januar 2010 ein
Fluggerät präsentiert hatte, das auf ausreichend rauhen senkrechten
Flächen landen und von dort auch wieder starten kann (s.d.), scheint
selbst inzwischen an der Université
de Sherbrooke im kanadischen Quebec gelandet
zu sein, denn auf der Konferenz Living Machine
2017 im August stellt er mit einem neuen Team das haargenaue
gleiche Modell erneut vor.
Die alte Drohne mit dem neuen Namen S-MAD (Sherbrookes Multimodale Autonome Drohne) gewinnt diesmal sogar den ‚Best Robotics Paper Award‘. Und immerhin gib es jetzt eine detailliertere Abbildung davon, sowie einige technische Details.
Demnach fliegt die Drohne mit einer Geschwindigkeit von 7 – 9 m/s pro Sekunde horizontal auf die als Landezone ausgewählte Wand zu. Ein Lasersensor erkennt die Wand, und die Rückkopplungssteuerung verlangsamt das Flugzeug auf 1 – 3 m/s, während die Drohne nach oben kippt. Der Schub erhöht sich währenddessen, um eine vertikale Position zu halten, wenn sie sich der Wand nähert. Dort rasten dann Mikrofaserfüße ein und eine Aufhängung absorbiert die kinetische Energie des Aufpralls.
Bei aller Begeisterung für diese Technologie darf nicht vergessen werden, daß sie gegenwärtig nur mit extrem leichten Fluggeräten funktioniert.

(Grafik)
Von dem S-MAD Prototypen inspiriert ist das Konzept der Aufklärungsdrohne Whisper,
die im Oktober 2018 von Charles Bombardier erdacht
und von Ashish Thulkar, einem indischen Industriedesigner
aus Bangalore, entworfen wird. Der kleine und leichte Whisper ist mit
einem Sensor ausgestattet, der eine vertikale Fläche erkennt – woraufhin
der Robot-Vogel vom Bordcomputer so gesteuert wird, daß er sanft auf
ihr landet.
Während der Whisper an der Wand sitzt, kann er die auf seinem Rücken angebrachten Onboard-Kameras verwenden, um einen Überblick über das Gebiet zu erhalten. Damit soll er zur Luftüberwachung bei Katastropheneinsätzen, zur Inspektion schwer zugänglicher Infrastruktur und zur Überwachung von Wildtieren in abgelegenen Gebieten eingesetzt werden.
Der Whisper kann auch in Schwärmen eingesetzt werden, um mehrere Feedback-Quellen zu nutzen. In einer solchen Konfiguration können zusätzliche Funktionen wie 3D-Imaging, die Erweiterung eines Peer-to-Peer-Wi-Fi-Dienstes oder der Einsatz mehrerer unterschiedlicher Sensoren (jede Drohne hat einen anderen) erreicht werden.
Abgesehen davon, daß die Drohne keine Energie benötigt, um sich mit Mikrogriffen oder kleinen Haken bzw. kleinen Elektromagneten im Fall von metallischen Oberflächen auf Position zu alten, könnte eine fortgeschrittene Version auch nach Windquellen suchen (z.B. Abluftkanäle von Gebäuden), um ihren Akku durch den Propeller aufzuladen. Oder sie nutzt dafür die Kraft leichter Winde, die um Ecken und Kanten wehen.

Die kalifornische Firma VTOL Aerospace (früher: Elytron
Aircraft LLC) von Oliver Garrow entwickelt seit einigen
Jahren ein Passagier-Kipprotorflugzeug mit geschlossenem, 8,5 m weitem
Flügel, das den Senkrechtstart eines Hubschraubers mit der Reichweite
und Effizienz eines Starrflüglers kombiniert. Das Konzept des 2S
Tiltrotor war erstmals auf der AirVenture Oshkosh 2014 gezeigt
worden, ein Demonstrator des Zweisitzers dann auf der Hai-Helo Expo in
Orlando, Florida, im März 2015. Ich habe darüber nicht
berichtet, weil das Unternehmen plant, als Antrieb einen Brennstoff-betriebenen
450 PS Turbo-Rennmotor zu installieren.
Nun, im August 2017, stellt das im Silicon Valley ansässige Startup eine kleinere, unbemannte Version namens Converticopter vor, um den wachsenden Markt für UAVs zu erschließen. Das Produkt wird für Regierungs- oder kommerzielle Organisationen entwickelt, die in Aktivitäten wie Suche und Rettung, Grenzpatrouillen oder Öl- und Gasinspektionen involviert sind. Der als YouTube-Clip dokumentierte Jungfernflug des Prototyps Proto12 erfolgte im Monat zuvor.
Mit demselben geschlossenen Kasten-Design und zwei Kipprotoren hat das verkleinerte Fluggerät eine Spannweite von etwa 2,4 m, und kann mit seiner 20 Ah Batterie bis zu 1,5 Stunden in der Luft bleiben, was sich mit einem elektrischen Hybridkraftwerk auf mehr als fünf Stunden verlängern läßt. Das anfängliche Modell CVC 96 kann eine Nutzlast von bis zu 2,2 kg tragen, doch das Unternehmen spricht auch von Modellen mit einer Spannweite von bis zu 12,1 m, die mit einer größeren Stromquelle längere Flugzeiten und erhöhte Nutzlastgrößen bieten.

im Vergleich
Im September zeigt DJI auf der IFA die Drohne Mavic
Pro Platinum, eine neue Version des zusammenklappbaren QuadroKopters Mavic
Pro, die durch neue Rotoren um 60 % leiser ist
und dabei 11 % länger fliegen kann, womit eine Flugzeit von 30 Minuten
erreicht wird.
Große bauliche Änderungen hat der Hersteller dafür nicht vorgenommen. Es wurden nur die Electronic Speed Controllers (ESCs) neu gestaltet – und die Propeller haben nun nach hinten abgewinkelte Wing-Tips, die für das verblüffende Ergebnis sorgen, daß das Drohnen-typische Surren wie abgeschaltet wirkt und man stattdessen nur noch die Luftströmungen hört. Laut Hersteller soll die 1.300 € kostende Drohne im September ausgeliefert werden.
Alle Besitzer der bisher verkauften Version können die neuen Rotoren namens 8331 im DJI-eigenen Onlinestore für 10 € als Ersatzteil nachkauften, da sie auch mit dem älteren Modell kompatibel sind.
Im gleichen Monat wird auch eine weitere amphibische Drohne vorgestellt,
die diesmal von einem Team der Johns Hopkins University entwickelt
wurde und in der Lage ist, sowohl durch die Luft zu fliegen als auch
unter Wasser zu schwimmen. Eine tauchfähige Drohne namens CRACUNS hatte
das Team bereits im März 2016 präsentiert,
nachdem im Monat zuvor die Oakland University den fast
gleichartigen Loon Copter gezeigt hatte.
Benannt nach der Kreatur, die ihn inspiriert hat, ist der Flying Fish das Ergebnis von zweieinhalb Jahren Arbeit der Robotikforscher Joe Moore, Eddie Tunstel und Robert Osiander. Er wird in der Luft und unter Wasser von ein und demselben Motor/Propeller bewegt, der sich schnell dreht, während das UAAV (unmanned aerial-aquatic vehicle) in der Luft ist, und sich auf eine geringere Geschwindigkeit verlangsamt, wenn es unter die Wasseroberfläche taucht. Will das Fahrzeug in die Luft zurückkehren, entwickelt der Motor/Propeller genügend Schub, um es zu beschleunigen und aus dem Wasser zu heben.
Die Idee dahinter ist, daß der Flying Fish mit 48 km/h autonom zu einem Binnengewässer fliegt, dort Umweltdaten sammelt oder mit Hilfe von On-Board-Sensoren und einer Kamera Erkundungen durchführt und dann wieder zur Operationsbasis zurückfliegt. Eine sehr ähnliche amphibische Drohne namens AquaMav war übrigens schon im Dezember 2016 von Forschen des Imperial College London vorgestellt worden (s.d.).

Auch militärische Neuigkeiten gibt es in diesem Monat, als Lockheed
Martin auf der Defence and Security Equipment International
(DSEI) in London eine neue faltbare Kanister-Drohne vorstellt. Das leichte,
von Kanistern aus gestartete unbemannte UAV namens Outrider ist
nur 10 cm breit und wiegt nur 1,7 kg, kann aber Geschwindigkeiten von
bis zu 93 km/h erreichen. Zudem sei die Ausdauer- und Nutzlastkapazität
größer als vergleichbare Drohnen.
Entwickelt wurde der Outrider in Zusammenarbeit mit dem Verbundwerkstoffhersteller Wirth Research, doch technische Spezifikationen werden noch keine herausgegeben. Bekannt wird nur, daß der Outrider mit einem einzigen Tastendruck gestartet werden kann und entweder autonom oder ferngesteuert von einem Operator betrieben werden kann. Die auch für zivile Anwendungen gedachte Drohne wird sowohl in Großbritannien als auch im Ausland vermarktet.
Vom Aufbau her sieht die neue Drohne dem UAV Coyote der Firma Advanced Ceramics Research Inc. (ACR) aus Tucson sehr ähnlich, das im Rahmen des Low-Cost UAV Swarming Technology (Locust) Systems der US-Navy genutzt wird (s.u. 2015).

der UATC
Ein weiteres unbemanntes Fluggerät mit Kipprotoren zeigt die erst im November 2016 gegründete Firma Unique (Yin Chuan) Aero-Tech Corp. (UATC) im September auf der ‚TM Forum Smart City In Focus‘ Konferenz im chinesischen Yinchuan, wo das Unternehmen auch angesiedelt ist.
Die Drohne ist speziell für die die städtische Luft- und Verkehrsüberwachung entwickelt worden, die als ein entscheidendes Element im Informationsmosaik jeder ‚intelligenten Stadt‘ der Zukunft betrachtet wird. Hierfür ist die Kombination aus Effizienz und Geschwindigkeit eines Starrflüglers mit den Vorzügen eines Hubschraubers, an einem bestimmten Ort zu schweben und diesen zu überwachen, natürlich besonders gut geeignet.
Die gegenwärtig einzigen funktionierenden unbemannten Flugzeug mit Kipprotoren sind der Firma zufolge die experimentellen UAVs des Korea Aerospace Research Institute (KARI) mit den Modellnamen TR-100 und TR-60, die allerdings erheblich größer und Brennstoff-betrieben sind. Die Entwicklung der VTOL-UAVs am KARI ist seit 2002 im Gange, und die neueste Version TR-60, die ihre Testflüge im Juli 2017 beendet, hat ein Höchstabfluggewicht von 995 kg, kann eine Nutzlast von bis zu 90 kg transportieren und erreicht eine Höchstgeschwindigkeit von 500 km/h.

(Detail)
Daneben gibt es zwar weltweit mehrere kleine Kipprotor-Multikopter-UAVs, von denen einige in dieser Übersicht aufgeführt worden sind, doch diese haben nicht die Ausdauer und die Nutzlastkapazität, um allzu viel mehr als Spielzeug zu sein, zumindest solange, bis die Batteriedichte um eine Größenordnung weiter gereift ist.
Der technische Durchbruch im Flugzeugdesign, der es dem neuen UAV der Firma UATC ermöglicht hat, in weniger als einem Jahr vom Konzept zur Kommerzialisierung überzugehen, beinhaltet die Entwicklung von kleinen Propellern unterhalb der Nase und des Hecks des Flugzeugs, die es bei Start, Landung und Übergang zwischen Horizontal- und Vertikalflug stabilisieren.
Wirtschaftlich war es wiederum die technischen Zusammenarbeit und die finanzielle Unterstützung der Regierung von Yinchuan und des lokalen Telekommunikationsgiganten ZTE, der so schnelle Fortschritte erlaubt hat. Beide Organisationen sind der Smart City-Initiative in Yinchuan verpflichtet, wobei die nordchinesische Stadt als Testumgebung und Bauplan für weitere 100 Smart Cities in ganz China genutzt wird. Die UATC ist eine der ersten kommerziellen Ausgründungen der Yinchuan Smart City-Initiative.
Die Firma bietet den aus Kohlefaser hergestellten Kipprotor-Flieger nun mit einem batterieelektrischen oder einem Wasserstoff/Brennstoffzellen-Antriebssystem an. Das 120.000 $ teure Fluggerät wiegt in beiden Fällen 17 kg, ist gut 2 m lang, hat eine Spannweite von 2,6 m und kann eine Nutzlast von 6 kg tragen. Die Brennstoffzellen-Version erreicht eine Höchstgeschwindigkeit 120 km/h und eine Flugzeit von sechs Stunden, die sich im Fall eines Schwebeflugs allerdings auf zwei verkürzen.
Das Gerät wird bereits verwendet, um mit acht verschiedenen Sensoren an Bord die Luftqualität in Yinchuan zu messen und diese zusammen mit den GPS-Koordinaten des Flugzeugs in Echtzeit zu übertragen, was die Lokalregierung als ‚Umweltforensik‘ bezeichnet. Es ist daher etwas überraschend, daß sich beim aktuellen Update Mitte 2018 nichts mehr über das Unternehmen finden läßt.

Ein wesentlich energieeffizienterer Schwebeflug läßt sich bekanntermaßen
mit Leichter-als-Luft-Systemen bewerkstelligen, von denen es in dieser
Übersicht schon einige gegeben hat.
Mitte September 2017 zeigt die Firma Egan Airships Inc. aus Seattle die Kreuzung eines Flugzeugs mit einem Luftschiff, die folgerichtig PLIMP heißt (aus plane und blimp). Das unbemannte und 8,5 m lange große Fluggerät verfügt über eine mit Helium gefüllte Hülle, die einen passiven Auftrieb bietet, während es der geflügelte, steife Körper erlaubt, fast so schnell wie eine konventionelle Drohne zu fliegen. Die Vorwärtsgeschwindigkeit wird mit mehr als 64 km/h angegeben, die Flugzeit, je nach Nutzlast, mit mindestens einer Stunde.
Sollten die Motoren ausfallen, wird der 25 kg schwere PLIMP nicht vom Himmel fallen, sondern Dank des Auftriebs seiner Hülle und seiner Flügel mit einer Geschwindigkeit von 14 km/h nach unten gleiten. Anderen Quellen zufolge kann die Plimp-Drohne eine Stunde lang mit einer Geschwindigkeit von 50 km/h und einer Nutzlast von 2,2 kg über eine Entfernung von 30 km fliegen.
Die Zwillingsbrüder Joel und James Egan, ein Architekt und ein Anwalt, die das Fluggerät entworfen hatten, als sie noch Kinder waren, erwarteten eigentlich, daß jemand in den 1980er oder 1990er Jahren ein mittelgroßes Luftfahrzeug wie den PLIMP entwickeln würde, doch niemand tat es. Also beschließen sie, die Idee selbst zu verfolgen und stellen 1999 einen Ingenieur ein, der die Möglichkeit prüfen soll, das Fluggerät zu bauen.
Leider kommt der Bericht zu dem Schluß, daß eine Umsetzung unmöglich ist, weil das Gewicht der Komponenten zu schwer ist, die Avioniksysteme nicht leistungsfähig genug sind und die Computertechnik die Luftströmungen nicht digital vorhersagen kann. Als Ergebnis wird die Idee auf Eis gelegt – bis 2012 ein weiterer Bericht angefordert wurde, der diesmal zu dem Schluß kommt, daß die Idee in drei bis sechs Jahren tragfähig sein könnte.

(Grafik)
Die Egans beginnen 2014, an ihrem Konzept zu arbeiten, gründen später die gleichnamige Firma PLIMP und entwickeln bis 2017 den auch schon patentierten Flugzeug/Blimp-Hybrid. Zu den positiven Nebeneffekten dessen großer Hülle gehört die gute Sichtbarkeit für Piloten anderer Flugzeuge, die somit nicht mit der Drohne kollidieren. Darüber hinaus ermöglicht die Größe dem bodengebundenen Bediener, sie in einer Entfernung von bis zu 5 km in Sichtweite zu halten. Die Pläne sehen vor, daß das Fluggerät im ersten Quartal 2018 kommerziell erhältlich sein wird. Zudem gibt es Hoffnungen auf eine größere Passagierversion.
Die Proof-of-Concept-Drohne wird auf der InterDrone 2018 Expo im September in Las Vegas vorgeführt, und Ende des Jahres sucht der Luftschiffhersteller Käufer, um die Entwicklung der größeren Version Modell J zu unterstützen, die bis zu zehn Personen, d.h. acht Passagiere und zwei Piloten befördern soll. Der Verkaufspreis beträgt 4 Mio. $, die über einen Zeitraum von vier Jahren zu zahlen wäre.
Die Leistungsschätzungen für das 51 m lange Modell J hängen weitgehend von seinen Nutzlasten ab. Bei voller Kapazität (900 kg) ist das Fluggerät auf eine Reisegeschwindigkeit von 130 km/h über fünf Stunden bei einer Reichweite von 510 km beschränkt. Mit weniger Gewicht kann es 150 km/h erreichen und bis zu 2.000 km zurücklegen.

(Grafik)
Im September 2017 veröffentlicht das britische, multinationale
Rüstungsunternehmen BAE Systems das Konzept eines sogenannten anpassungsfähigen
UAV (Adaptable UAV), das in Zusammenarbeit mit Studenten der
britischen Cranfield University entwickelt worden war
und für den Einsatz durch die Streitkräfte in den nächsten Jahrzehnten
vorgesehen ist.
Das gemeinsame Team hat die gut bekannte Idee des senkrechten Starts und des Wechsels zum schnelleren, effizienteren Starrflügelflug aufgegriffen – und ganz neu interpretiert. Die Drohne würde als Starrflügler mit beiden Motor/Propeller-Einheiten nach vorne fliegen. Bei Starts und Landungen würde sich jedoch eine dieser Einheiten rückwärts drehen, was dazu führt, daß sich das UAV in einen Drehflügelmodus umwandelt, in dem das gesamte Flugzeug auf der Stelle herumwirbelt, um dabei vertikal zu steigen oder zu sinken.
Wie in der abgebildeten Grafik zu sehen ist, haben die Drohnen auch ein großes Loch in der Mitte, das bei Starts und Landungen verwendet wird. Angedacht ist nämlich, ganze Schwärme des Fluggeräts auf mastenartigen Pfählen zu stapeln, die durch ihre Mitte verlaufen. Im Drehflügelmodus können die UAVs z.B.von Schlachtfeldern aus gestartet und nach ihrem Einsatz wieder geborgen werden. Diese Aufnahme-Stangen sollen wiederum gyroskopisch stabilisiert werden, so daß sie selbst bei ihrer Montage auf Schiffen in rauher See oder auf sich bewegenden Landfahrzeugen stabil und aufrecht bleiben.
Anfang September 2017 behauptet der chinesische Drohnenhersteller Foxtechhobby,
mit einem Flug von 3 Stunden den Weltrekord für
die längste Flugzeit einer Drohne aufgestellt zu haben. Dabei bewältigte
der GAIA 160-Hybrid Hexakopter von Foxtech eine Strecke
von 100 km, die über See von einem Boot in Changdao aus bis an die Küste
von Dalian verlief. Dabei wurde die Drohne von einer Yacht begleitet,
die sich stets in einem Umkreis von 500 m befand, um dem Piloten die
ständige Kontrolle über das Fluggerät zu ermöglichen.
Der Hybrid-Hexakopter, der für rund 14.200 $ angeboten wird, verfügt über einen integrierten, mit Brennstoff betriebenen 2.000 W Generator und einen 4 Liter Tank, um die sechs hocheffizienten Motoren mit Strom zu versorgen. Neben der Benzinvariante, die hier nicht behandelt wird, ist die Elektrohybrid-Kraftquelle gegenwärtig eine der wenigen Methoden, solch lange Flugzeiten zu erreichen.
Lange erfreuen kann sich Foxtech an dem Rekord allerdings nicht, denn nur wenige Tage später berichtet das 2014 gegründete kalifornische Startup Skyfront, daß seine Multirotor-Drohne Tailwind diesen mit einem Flug von 4 Stunden und 34 Minuten gebrochen habe. Als Beweis für die Legitimität des Anspruchs legt die Firma ein Zeitraffer-Video vor, das die Drohne in Aktion zeigt. Doch auch diesmal hält der Rekord nicht lange.

Im Dezember 2017 meldet das spanische Startup-Unternehmen Quaternium Technologies mit einem seiner HYBRiX.20 Quadrokopter einen weiteren Weltrekordflug, als dieser mit eigener Energieversorgung für 4 Stunden und 40 Minuten im Flugzustand verbleibt. Wie der Name vermuten läßt, ist auch dieses Fluggerät eine hybride benzin-elektrische Drohne. Der Langzeitflug findet übrigens am Weihnachtsabend in Valencia, Spanien, statt.
Die meisten Multikopter-Drohnen, die es von der Stange zu kaufen gibt, weisen Flugzeiten von 25 – 30 Minuten auf, obwohl einzelne kundenspezifische Multikopter weit länger fliegen können. Als Beispiel dafür gilt die Überquerung des englischen Kanals im Februar 2016, als der Enduro 1 Quadrokopter des britischen kommerziellen Drohnenoperators Ocuair die ca. 35 km lange Strecke in 72 Minuten überfliegt (s.d.).
Bislang verzeichnet Guinness als längsten Hybriddrohnen-Flug eine Zeit von 2 Stunden, 6 Minuten und 7 Sekunden, während in den o.g. Fällen, in denen die Drohnen länger geflogen sind, keine Guinness-Vertreter anwesend waren, um das Ereignis zu dokumentieren. Auch Quaternium kann als Beweis für die Legitimität seines Anspruchs nur ein Zeitraffer-Video vorweisen. Dieses zeigt den Quadrokopter des Unternehmens, der in der Luft schwebt, mit einer Uhr im Vordergrund, welche die Zeit herunterzählt.
Zum Vergleich: Im Oktober 2017 stellte Vanilla Aircraft mit seinem Starrflügel-Modell VA001 den Weltrekord für den längsten unbemannten Flug mit Verbrennungsmotor auf. Die dieselbetriebene Drohne mit einer Spannweite von 11 m bleibt 5 Tage, 1 Stunde und 24 Minuten in der Luft (= 121 Stunden und 24 Minuten). Und nachdem sie in einer kreisförmigen Flugbahn 11.265 km geflogen war, landete sie mit Treibstoff für weitere drei Tage in den Tanks.

Im April 2019 wiederum montiert das südkoreanische Unternehmen MetaVista Inc. eine 6-Liter-Flüssigwasserstoff-Flasche und ein 800 W Brennstoffzellen-Energiemodul von Intelligent Energy an eine Drohne und zeichnet den bislang längsten Hybrid-Multirotor-Flug auf – mit 12 Stunden, 7 Minuten und 5 Sekunden.
In einer anderen Klasse war es der bereits mehrfach erwähnten unbemannten und solarbetriebenen Flugdrohne Zephyr des britischen Rüstungskonzerns QinetiQ im Juli 2010 gelungen, während eines Testflugs über zwei Wochen lang durchgehend in der Luft zu bleiben (s.d.).
Im Oktober 2020 stellen die Blogs den Hybrid-Quadrokopter HYBRiX 2.1 vor, der den bisherigen Weltrekord gebrochen hat, indem eine experimentelle Version im Februar dieses Jahres in Valencia eine Flugzeit von 8 Stunden und 10 Minuten erreicht.
Im November wird der Rekord erneut gebrochen, indem er nach Angaben der Firma 10 Stunden und 14 Minuten in der Luft blieb. Möglich wurde dies durch mehrere Verbesserungen, vor allem durch einen überdimensionalen 16-Liter-Treibstofftank, der unter der Drohne angebracht ist, sowie durch den Einbau eines Einspritzsystems in den Zweitaktmotor des Quaternium-Quadrokopters.

In der Standardausführung wiegt die HYBRiX 2.1 genau 13 kg, kann bis zu 10 kg Fracht oder Zubehör transportieren und hat eine Reisegeschwindigkeit von 50 km/h mit einer Spitzengeschwindigkeit von 80 km/h.
Die o.e. Firma Skyfront beansprucht im März 2021 einen neuen Ausdauer-Weltrekord für ihre Multirotor-Drohne Perimeter 8, die jüngst 13 Stunden, 3 Minuten und 57 Sekunden lang in der Luft blieb und dabei 330 km zurücklegte. Sie hat eine Größe von 2 x 1,9 m und wird von einem Benzin/Elektro-Hybrid-Antriebsstrang angetrieben.
Da der serienmäßige Perimeter 8 ohne Nutzlast nur eine maximale Flugdauer von gut fünf Stunden und eine Reichweite von 177 km hat, war der Rekordbrecher mit einem Zusatztank ausgestattet worden, um die Flugzeit mehr als zu verdoppeln. Da aber keine Guinness-Beamten vor Ort waren, um diese Leistung zu dokumentieren, gibt es für den Rekord kein Zertifikat von Guinness.
Weiter mit den Elektro- und Solarfluggeräten...