Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2021 (C)
Im Januar 2021 veröffentlicht ein Team der ETH
Zürich und der niederländischen Delft University of
Technology den Bericht über die Entwicklung einer Technik,
die es beschädigten Quadrokoptern ermöglicht, mit nur drei
Motoren weiter zu fliegen (‚Autonomous Quadrotor Flight Despite
Rotor Failure With Onboard Vision Sensors: Frames vs. Events‘).

Üblicherweise fängt eine Drohne an, sich schnell zu drehen und die Orientierung im dreidimensionalen Raum zu verlieren, wenn einer ihrer vier Motoren ausfällt. Es gibt zwar Systeme, die mit Hilfe von GPS-Daten die Orientierung wiederherstellen können, aber GPS-Signale sind nicht immer verfügbar – vor allem, wenn die Drohne in geschlossenen Räumen fliegt.
Auf der Suche nach einer Alternative rüsten die Wissenschaftler einen kleinen Quadrokopter mit zwei winzigen Onboard-Kameras aus. Bei der einen handelte es sich um eine normale optische Kamera, bei der anderen um eine sogenannte Ereigniskamera (event camera). Letztere verfügt über Pixel, die unabhängig voneinander auf auftretende Helligkeitsveränderungen reagieren. Als sich der Kopter nach dem Entfernen eines Propellers zu drehen beginnt, werden spezielle Algorithmen verwendet, um eine Echtzeitanalyse der Daten der beiden Kameras durchzuführen.
Indem sie verfolgen, wie sich die Position bestimmter visueller Referenzpunkte von einem Videobild zum nächsten verändert, können diese Algorithmen berechnen, wie sich die Position des Fluggeräts verändert. Die Drohne ist damit in der Lage, diese Veränderungen zu kompensieren, so daß sie ihre Position beibehalten kann, während sie sich weiter dreht – und kann sogar eine vorprogrammierte Flugbahn absolvieren.
Bei der alleinigen Verwendung der optischen Kamera werden die Videos bei schlechten Lichtverhältnissen allerdings zu unscharf, was zum Absturz des Quadrokopters führt. Durch die Hinzunahme der empfindlicheren Ereigniskamera stehen jedoch genügend visuelle Daten zur Verfügung, um die Drohne auch bei schwachem Licht in der Luft zu halten.
Zur Erinnerung: An der ETH Zürich war bereits im Jahr 2013 ein System entwickelt worden, das es Quadrokoptern ermöglicht, auch dann sicher zu landen, wenn bis zu drei ihrer Motoren ausfallen (s.d.).

(Grafik)
Im gleichen Monat erscheinen Berichte über Forscher der chinesischen Universität
Nanjing, denen es gelungen ist, verschränkte Photonen zwischen
zwei Drohnen auszutauschen. Die Entwicklung wird als Durchbruch auf dem
Weg zum Quanten-Internet beschrieben, das komplett abhörsicher wäre.
Nachdem ein Team aus den USA Ende des Vorjahres ein sogenanntes Qubit (Quantenbit) als Lichtquant durch eine 44 km lange Glasfaserleitung geschickt hat, während bei anderen Versuchen verschränkte Photonen zwischen einem Satelliten und zwei 1.200 km voneinander entfernten Bodenstationen transportiert wurden, können Zhenda Xie und seine Kollegen nun zeigen, daß Verbindungen über kürzere Distanzen auch mit relativ kostengünstiger Hardware möglich sind.
Es ist auch das erste Mal, daß verschränkte Photonen zwischen zwei beweglichen Geräten übertragen werden. Im Einzelnen sieht dies so aus, daß ein Laser an Bord einer der beiden 35 kg schweren Drohnen ein Paar verschränkter Infrarot-Photonen erzeugt, indem er ein einzelnes Photon mit einem Kristall aufspaltet. Ein Photon wird dann direkt an eine Bodenstation und das andere über eine Relaisdrohne an eine zweite, einen Kilometer entfernte Drohne gesendet.

Die Steuerungsvorrichtungen auf jeder der Drohnen stellen sicher, daß die Sender-Empfänger-Kette immer linear in einer Reihe fliegt, und die Photonen werden fokussiert und auch noch durch ein kurzes Stück Glasfaserkabel in der Relaisdrohne geleitet. Dann werden die Zustände jedes der beiden abgesandten Photonen in der Bodenstation gemessen, wobei die Ergebnisse belegen, daß die durch Aufspaltung erzeugten Photonen verschränkt geblieben waren.
Die Drohnen sind etwa 200 m voneinander entfernt, und jede ist 400 m von der Station entfernt, an die sie die Photonen weiterleitet, was bedeutet, daß die Nachricht insgesamt 1 km zurücklegt.
Die Wissenschaftler hoffen nun, daß Verbindungen von über 300 km durch fortschrittlichere Drohnen in großer Höhe und damit frei von störenden Einflüssen durch Verschmutzung und Witterungserscheinungen erreicht werden können und daß kleinere, kostengünstigere Drohnen für lokale Verbindungen, vielleicht sogar zu erdgebundenen Fahrzeugen, entwickelt werden könnten. Alle diese Geräte könnten sich dann sogar für eine globale Übertragung mit Satelliten verbinden.
Im Februar 2021 veröffentlichen Ingenieure der Duke
University in Durham, North Carolina, einen Bericht über die
Entwicklung eines elektronikfreien und autonomen weichen Roboters, der
wie eine Libelle geformt ist. Der DraBot genannte Roboter
soll das Wasser überfliegen, um Änderungen der Umgebung wie steigende
pH-Werte, Temperatur oder Ölverschmutzungen anzuzeigen – und dies ohne
jegliche Elektronik an Bord.

Der nur 5,7 cm lange und 3,5 cm breite DraBot verfügt über ein Netz von Mikrokanälen im Inneren, die mit flexiblen Silikonschläuchen verbunden sind, durch welche Luft in die Flügel gepumpt wird, die durch Löcher auf der Rückseite entweicht und den Roboter über das Wasser treibt. Mit Hilfe von aufblasbaren Aktuatoren können diese hinteren Flügel abgesenkt werden, wodurch der Luftstrom blockiert wird und der DraBot stillsteht. Auf diese Weise kann das Team steuern, welche Flügel oben und unten sind, und somit die Richtung, in die sich der Roboter bewegt.
Um den Roboter für die Umweltüberwachung auszurüsten, greift das Team auf ein selbstheilendes Hydrogel zurück, das in einem früheren Forschungsprojekt entwickelt worden war. Das Material reagiert auf Veränderungen des Säuregehalts, indem es in sich selbst neue Bindungen bildet, die sich wieder auflösen, wenn sich der pH-Wert wieder normalisiert. Das Team beschichtet zwei der Flügel des DraBot mit dem Hydrogel, so daß ein Vorder- und ein Hinterflügel miteinander verschmelzen, wenn er in stark saures Wasser eintaucht.
Dadurch dreht sich der DraBot bei höheren pH-Werten im Kreis, anstatt sich in einer geraden Linie zu bewegen. Wenn sich diese pH-Werte normalisieren, trennen sich die verschmolzenen Flügel und der Flugroboter kann wieder normal gesteuert werden. Daneben werden auch Schwämme in den DraBot eingebaut und dessen Flügel mit temperaturabhängigen Materialien dotiert. Wenn sich der Roboter durch das Wasser bewegt und auf Öl an der Oberfläche stößt, saugen die Schwämme das Öl auf und verändern ihre Farbe. Auch wenn die Wassertemperatur ungewöhnlich hoch ist, verfärben sich die Flügel von rot nach gelb.
Das Team will nun eine Reihe von Verbesserungen am DraBot vornehmen. So würde die Ausstattung mit einem eingebauten Treibstoff die Silikonschläuche überflüssig machen, während das Hinzuzufügen von Kameras und Sensoren die Umweltüberwachungsfähigkeiten stark erweitern würde. Zudem soll eine Art synthetische Biologie verwendet werden, die Energie erzeugt.
Ebenfalls im Februar 2021 präsentieren Forscher der Zhejiang
University im chinesischen Hangzhou einen neuen Navigationsalgorithmus,
mit dem Flugroboter geschickt und unfallfrei automatisiert durch enge
Räume wie einen Wald voller Bäume steuern können, sogar als ganzer Schwarm.
Die autonome Navigationstechnik namens EGO-SWARM verfolgt
einen dezentralen wie asynchronen Ansatz. Die relevanten Daten werden
im Schwarm dennoch intelligent ausgetauscht, ausgewertet und umgesetzt.
Die übliche Technik, mit der einzelne Drohnen Kollisionen vermeiden, ist die rasche Kartierung der in der Nähe befindlichen Hindernisse mittels eingebauter Kamera und Auswertungsrechner, um dann zu reagieren. Diese Daten kombiniert das Entwicklerteam über ein drahtloses Netzwerk, über das die Drohnen ihre Flugrouten miteinander teilen. Die Flugroute wird in Echtzeit angepaßt und die Drohnen bleiben trotzdem in Formation.
Zu diesem Zweck werden die Drohnen so programmiert, daß ein Kollisionsrisiko als ‚Penalty‘ eines nichtlinearen Optimierungsproblems aufgefaßt wird. Entsprechend versucht die Systeme, einen Aufprall in jedem Fall zu vermeiden. Diese Technik erfordert wenig Rechenleistung und soll sogar dann funktionieren, wenn die drahtlose Verbindung schwächelt. In Simulationen ist es jedenfalls bis zu zehn virtuellen Drohnen möglich, kollisionsfrei und formationstreu durch dichtbewachsene Wälder zu schwärmen.
Zudem wird die Robustheit und Funktionsweise der Technik auch an je drei realen Drohnen getestet, sowohl in Innenräumen, die mit vielfältigen Hindernissen ausgestattet sind, als auch in einem tatsächlichen Wald, in dem Bäume allerdings etwa 2 m Abstand zueinander haben. Die Höchstgeschwindigkeit der Drohnen beträgt bei diesen realen Experimenten 1,5 m pro Sekunde.
Eine Weiterentwicklung der Technik soll die Beobachtungen der anderen Drohnen optimieren und ihre Fähigkeit verbessern, sich bewegende Objekte besser vorherzusehen. Dann könnten die Drohnen auch dynamischen Hindernissen im Schwarm flexibel ausweichen. Der Quellcode des Verfahrens wurde übrigens freigegeben.
Um im Kontext zu bleiben: Im Juni veröffentlicht ein Team der Schweizer École
Polytechnique Fédérale de Lausanne (EPFL) eine im Netz einsehbare
Studie über ein Vorhersagemodell, das die Geschwindigkeit,
die Ordnung und die Sicherheit eines Drohnen-Schwarms verbessert, der
in unübersichtlichen Umgebungen der realen Welt fliegt, z.B. in Wäldern
und städtischen Gebieten (‚Predictive control of aerial swarms in cluttered
environments’).

für Drohnenschwarm
Der Ansatz ist unabhängig von der Gestaltung der Umgebung und in Bezug auf die Schwarmgeschwindigkeit und den Abstand zwischen den Drohnen skalierbar. Er wird mit einem Schwarm aus fünf autonomen Crazyflie-Quadrokoptern validiert, die erfolgreich in einer realen Innenraumumgebung mit Hindernissen navigieren, einem künstlichen Wald in der Größe eines Schlafzimmers. Als ‚Bäume‘ dient ein Gitter aus acht grünen, faltbaren Kinderspieltunneln von Ikea, die aus einem weichen Stoff bestehen, so daß die Drohnen nicht kaputt gehen, selbst wenn sie dagegen fliegen.
Autonome Schwärme werden in der Regel reaktiv gesteuert, d.h. auf der Grundlage ihres aktuellen Abstands zu Dingen, die sie nicht treffen sollten. Wenn die Drohnen zu weit voneinander entfernt sind, rücken sie näher zusammen; wenn sie sich einem Hindernis nähern, werden sie langsamer und entfernen sich voneinander. Diese Fehlerkorrektur ist zwar sinnvoll, aber die Zeit, die benötigt wird, um diese Korrekturen zu erkennen, zu berechnen und vorzunehmen, verlangsamt die gesamte Gruppe.
Der neue Autopilot-Algorithmus vermeidet die Verlangsamungen durch bessere Planung, indem er auf einer ‚vorausschauenden Steuerung‘ basiert: Die Drohnen kommunizieren miteinander und interpretieren Echtzeit-Bewegungserfassungsdaten, um vorherzusagen, wohin sich andere Drohnen in der Nähe bewegen werden. Indem sie eine künftige Verlangsamung ihrer Nachbarn vorhersehen, können sie die negativen Auswirkungen dieser Verlangsamung auf den Flug in Echtzeit reduzieren.
Anhand einer Computersimulation sowie der Demonstration des künstlichen Waldes kann das Team zeigen, daß ihre Drohnen 57 % schneller durch die Hindernisse fliegen als ‚reaktive‘ Steuerungen, die keine Vorhersage beinhalten.
Nur einen Monat später folgt eine Veröffentlichung der von Prof. Davide
Scaramuzza geleiteten Forschungsgruppe an der Universität
Zürich (UZH), die einen Algorithmus entwickelt
hat, der die schnellste Flugbahn finden kann, um einen Quadrokopter durch
mehrere Wegpunkte auf einem Rundkurs zu führen (‚Time-optimal planning
for quadrotor waypoint flight‘). Dieser Algorithmus ist der erste, der
die schnellstmöglichen Flugbahnen generiert und gleichzeitig die Begrenztheit
einer Drohne wirklich berücksichtigt.
Scaramuzza und sein Team hatten bereits 2016 eine Software entwickelt, mit welcher Drohnen Waldwege erkennen und ihnen selbständig folgen können – sowie im März 2020 einen mit einer Ereigniskamera und mit Algorithmen ausgerüsteten Quadrokopter vorgestellt, dessen Reaktionszeit auf wenige Millisekunden reduziert ist, wodurch er einem aus geringer Distanz geworfenen Ball auszuweichen vermag (s.d.).
Die Schlüsselidee der neuen Entwicklung ist, daß der Algorithmus der Drohne nur sagt, daß sie alle Wegpunkte durchfliegen soll – aber nicht, wie oder wann sie das tun soll. Als die Forscher den Algorithmus und zwei menschliche Piloten denselben Quadrokopter durch eine Rennstrecke fliegen lassen, gewinnt der Algorithmus: Alle seine Runden sind schneller als die der Menschen. Zudem bleibt die Leistung konstant: Hat der Algorithmus einmal die beste Flugbahn gefunden, kann er sie im Gegensatz zu menschlichen Piloten viele Male identisch reproduzieren.
Obwohl es das erste Mal ist, bei dem ein autonom fliegender Quadrokopter in einem Rennen zwei menschliche Profi-Dronenpiloten übertrifft, muß der Algorithmus vor einem kommerziellen Einsatz noch vereinfacht werden, da der Computer derzeit bis zu einer Stunde braucht, um die schnellstmögliche Flugbahn zu berechnen. Außerdem ist die Drohne für die Berechnung des eigenen Standorts noch auf externe Kameras angewiesen, weshalb die Wissenschaftler in Zukunft Onboard-Kameras einsetzen wollen.
Tatsächlich veröffentlicht das UZH-Team bereits im Oktober einen Bericht über eine weiterentwickelte Drohne, die ihren Flug ausschließlich mit Hilfe der Sensoren und Berechnungen an Bord kontrolliert – und dabei selbst in unbekannten, unübersichtlichen Umgebungen wie einem dicht bewachsenem Wald Geschwindigkeiten bis zu 40 km/h erreicht, ohne mit einem Hindernis zu kollidieren (‚Learning high-speed flight in the wild‘).
Die Drohne verdankt ihre Wendigkeit einem Training in simulierten Umgebungen, bei dem ihr neuronales Netz das Flugverhalten lernt, das sie dann auch in realen Umgebungen umsetzt. Um die Reaktionszeit zu verkürzen, verzichten die Forscher zudem auf das gängige Verfahren, zunächst eine Umgebungskarte zu erstellen und darin eine optimale Flugbahn zu ermitteln. Stattdessen werden die Sensordaten unmittelbar in kollisionsfreie Manöver umgesetzt.
Neben Wäldern wird das Verfahren auch in Gebäuden, Ruinen, bei Unfallszenarien sowie in verschneiten Landschaften mit wenig Orientierungspunkten getestet. Bei einer Geschwindigkeit von 7 m/s kommt es bei zwei von insgesamt zehn Flügen zu Kollisionen, als die Drohne enge Kurven fliegt und die im Weg stehenden Baumstämme dadurch erst spät wahrnimmt. Und selbst bei 10 m/s verlaufen noch 60 % aller Flüge störungsfrei.
Die Forscher wollen nun ihr Verfahren weiter verbessern, u.a. durch eine realistischere Simulation der Drohne selbst, insbesondere von deren aerodynamischen Eigenschaften, Motorlatenzen und den Effekten nachlassender Akkuleistung. Zudem sollen schnellere Sensoren entwickelt werden, die in kürzerer Zeit mehr Umgebungsinformationen liefern, damit die Drohne auch bei Geschwindigkeiten über 40 km/h sicher fliegt.
der Zhejiang University
Weitere erwähnenswerte Entwicklungen spezieller Algorithmen gehen auf ein von Chao Xu und Fei Gao geleitetes Forschungsteam an der chinesischen Zhejiang University zurück, die im Mai 2022 beschreiben, wie sie von Vögeln inspirierte Algorithmen entwickelt haben, die Flugbahnen für Drohnen im Voraus planen – statt kurzfristig auf Hindernisse zu reagieren.
Eine besondere Herausforderung ist, die dafür erforderliche Sensorik und Rechenleistung auf den knapp 300 g schweren Quadrokoptern unterzubringen, da der Drohnenschwarm keinerlei externe Infrastruktur wie Satellitennavigation nutzt. Pfadplanung, Kollisionsvermeidung und die Abstimmung der Drohnen untereinander erfolgen dezentral und ausschließlich mit Hilfe der bordeigenen Tiefenkameras, Ultrabreitbandsensoren und Computer.
Im Experiment fliegen zehn etwa handtellergroße Drohnen durch einen dichten Bambuswald und weichen nicht nur jedem Hindernis sicher aus, sondern bleiben auf der schwierigen, 65 m langen Strecke auch als Schwarm zusammen ohne miteinander zu kollidieren. Der im Netz einsehbare und mit vielen Videos unterlegte Bericht trägt den Titel ‚Swarm of micro flying robots in the wild‘. Dort ist auch zu sehen, wie der Drohnenschwarm trotz unvorhergesehener Hindernisse immer wieder zu einer vorgegebenen Formation zurückfindet, oder wie vier Drohnen einem Menschen folgen, obwohl er zeitweise durch Hindernisse verdeckt ist.
Im gleichen Monat stellen Entwickler des California Institute
of Technology (Caltech) um Soon-Jo Chung eine
selbstlernende Steuersoftware vor, die bei steifen Brisen
von bis zu Windstärke 6 in Echtzeit den Kurs halten soll – und damit
das Problem löst, daß Flugdrohnen bei etwas stärkeren Windböen leicht
von ihren Flugbahnen abkommen und sich nur noch schwierig manövrieren
lassen. Mit der Entwicklung namens Neural-Fly wären
vor allem Lieferdienste per Drohne nicht mehr ein reiner Schönwetter-Service.
Durch die Kombination aus Deep Learning und adaptiver Kontrolle kann eine Flugdrohne mit jedem Flug lernen, wie sie am besten auf neue Bedingungen reagiert und damit einen stabilen Flug bewältigt. Grundlage dieses maschinellen Lernens bilden die vielfältigen Sensoren der Drohne, die Daten zur Position, Geschwindigkeit und etwaige Kippwinkel entlang der drei Raumachsen bereitstellen.
Zum Training der Algorithmen fliegt ein Quadrokopter in einen Windkanal am Caltech, in welchem 1.200 kleine Propeller unterschiedlich gerichtete Windböen mit Geschwindigkeiten von etwa 43 km/h, entsprechend Windstärke 6, erzeugen. Um die selbstlernende Software zu trainieren reicht ein kurzer Flug von zwölf Minuten Dauer auf einer Flugbahn entlang einer gekippten Acht. Auch diese Studie unter dem Titel ‚Neural-Fly enables rapid learning for agile flight in strong winds‘ ist im Netz einsehbar.
Im Dezember 2022 folgt übrigens eine weitere Studie
des Caltech mit dem Titel ‚Machine learning for flow-informed aerodynamic
control in turbulent wind conditions‘, in der Peter I. Renn und Morteza
Gharib zeigen, wie Methoden des verstärkenden Lernens eine
effektive aerodynamische Steuerung in einer hochturbulenten Umgebung
erreichen können. Auch diese Algorithmen werden mit verschiedenen neuronalen
Netzwerkstrukturen trainiert.
Im weiteren Verlauf der Chronologie ist eine im Februar 2021 erschienene
Studie des Imperial College London zu erwähnen, die
sich mit dem Selbstaufrichtungsmechanismus von Libellen
befaßt und ebenfalls im Netz einsehbar ist (‚Dragondrop: a novel passive
mechanism for aerial righting in the dragonfly‘).
Die Ergebnisse der Studie könnten Ingenieuren helfen, passive Stabilitätsmechanismen in die Flügelstruktur von Starrflügeldrohnen einzubauen, die das Fluggerät – sollte es sich versehentlich auf den Kopf drehen – automatisch wieder umdrehen, um einen Absturz zu vermeiden.

Forscher der University of South Australia (UniSA) um
Prof. Javaan Chahl nehmen sich die Libellen wiederum
zum Vorbild, um eine „völlig neue Generation von Drohnen“ zu
entwickeln, wie im April 2021 bekannt wird. Grund dafür
sind die äußerst effizienten Flugfähigkeiten dieser Insekten, die sich
über Millionen von Jahren entwickelt haben: Sie können mühelos in der
Luft stehen, aber auch mit hoher Geschwindigkeit abheben und sich drehen,
während sie mehr als das Dreifache ihres eigenen Körpergewichts tragen.
Damit sind sie die perfekte Vorlage für innovative Drohnen.
Tatsächlich sind entsprechende Ansätze mindestens bis 2011 zurückzuverfolgen, als im Auftrag der CIA ein libellenförmiger Insectohopter entwickelt wurde – bzw. bis zu dem Libellen-Roboter des Georgia Institute of Technology im Jahr 2012.
Das UniSA-Team beginnt damit, die Flügelgeometrie von 75 verschiedenen Libellenarten aus Glasvitrinen in Museumssammlungen zu fotografieren, was erheblich einfacher ist, als die Libellen in der Natur unbeschädigt zu fangen. Im nächsten Schritt konstruieren sie 3D-Bilder der Flügel und vergleichen die Unterschiede zwischen den einzelnen Arten. Doch neben den Flügeln spielt auch der langer Hinterleib, der etwa 35 % des Körpergewichts ausmacht, eine entscheidende Rolle bei der Balance, Stabilität und Manövrierfähigkeit.
Für die neue Schlagflügel-Drohne will das Team daher auch diese besondere Körperform nachahmen und dadurch versuchen, die aerodynamischen Eigenschaften der Insekten auf künstliche Drohnen zu übertragen. Bevor diese aber ihre Einsätze fliegen können, müssen die Wissenschaftler den Prototypen auch noch so gestalten, daß er sich in Serie produzieren läßt.

Kontextbezogen sei hier auf einen weiteren Schlagflügelantrieb verwiesen, den ein Team von Wissenschaftlern der University of Bristol um Prof. Jonathan Rossiter und den Ingenieur Tim Helps entwickelt hat. Die im Netz einsehbare Studie trägt den Titel ‚Liquid-amplified zipping actuators for micro-air vehicles with transmission-free flapping‘.
Der LAZA (Liquid-amplified Zipping Actuator) genannte Antrieb für Insektenroboter benötigt keine Motoren und komplexe Mechanik, sondern basiert auf Elektrostatik. Es nutzt die Anziehungskraft entgegengesetzter Ladungen aus, um so eine Bewegung zweier Kunststoff-Flügel zu erzeugen. Diese sind zwischen zwei Elektrodenplatten eingebettet, die mit einem Isolator voneinander getrennt am Gelenk zusammenkommen. Durch Auf- und Entladen der Elektroden flattern die Flügel hin und her.
(in Funktion)
Dem Forscherteam zufolge funktioniert LAZA besser als frühere elektrostatische Aktuatoren und besitzt bei gleichem Gewicht sogar mehr Kraft als das entsprechende Muskelstück eines Insekts oder eines Säugetiers. Um das zu erreichen, wird dort, wo die Kraft am höchsten ist, etwas Öl aufgebracht. Dies erhöht die Kräfte und die Dichte des elektrischen Feldes, weil es ein guter Isolator ist, und dadurch ist es möglich, etwa eine Million Schlagzyklen zu erreichen, ohne daß das System an Leistung einbüßt.
Der Prototyp der Flügel mit einer Spannweite von 150 mm, die einem Glühwürmchen nachempfunden sind, ist in einem einfachen Rahmen eingebaut, der an Führungsfäden aus Nylon entlanggleiten kann, die im Labor gespannt sind. Dabei entwickelt der Prototyp bei einer angelegten elektrischen Leistung von 243 mW einen Vorwärtsschub von 5,73 mN, wodurch er mit einer Maximalgeschwindigkeit von 0,71 m/s, umgerechnet knapp 2,6 km/h, durch den Raum segelt. Im nächsten Schritt wollen die Wissenschaftler das LAZA-System mit einem ausgefeilteren Körper ausstatten.
Ebenfalls im April 2021 erzielt eine Quadrokopter-Drohne
von Xiang Bo und Wang Yang aus China
den Guiness-Rekord für die längste Flugdauer eines elektrisch
angetriebenen UAV-Rotorflugzeugs mit einem Gewicht von 5 kg oder weniger.
Der in Xichang, Sichuan, aufgestellte Rekord beträgt 2
Stunden, 3 Minuten und 11 Sekunden.
Weitere bionische Übernahmen aus der Insektenwelt, über die in diesem
Jahr berichtet wird, sind z.B. im Juni die Studien von Prof. Fritz-Olaf
Lehmann und seinem Team an der Universität Rostock,
die zeigen, daß die Essigfliege die Energie von Luftwirbeln,
die im Flug durch die Flügelbewegung gebildet werden, aus der Umgebungsluft
wieder zurückgewinnen kann. Dies reduziert die für das Fliegen notwendige
Muskelleistung und macht den Antrieb effizienter. Eine ähnliche Art des
Energierecyclings wurde bereits zuvor bei Fischen beobachtet, die Wasserwirbel
hinter Steinen für die Fortbewegung nutzen.
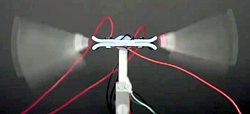
Für ihre Untersuchungen messen die Forscher im Laborversuch die Luftströmungen und Flügeldeformation bei der Flügelschlagumkehr mittels eines Hochgeschwindigkeitslasers und einer Videokamera mit 10.000 Bildern pro Sekunde. Die Wissenschaftler sind überzeugt, daß die neuen Erkenntnisse hilfreich für die Entwicklung von Kleinstrobotern sind, die Aufgaben übernehmen könnten, zu denen größere Fluggeräte nicht fähig sind.
der Haifischhaut
Im Mai 2021 stellten die Lufthansa Technik und
der Unternehmensbereich Coatings der BASF die gemeinsam
zur Serienreife entwickelte kostengünstige Folie AeroSHARK vor,
mit der ab dem Folgejahr die B777 Frachter von Lufthansa Cargo ausgerüstet
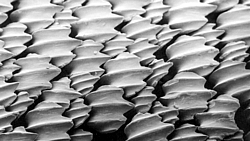
werden sollen. Die Oberflächenstruktur der Haifischhaut,
wie sie oft genannt wird, weist 50 µm große, Riblets genannte
Rippen auf. Die auch als Placoidschuppen bezeichneten mikroskopischen,
zahnförmigen Plättchen bedecken den Körper der Tiere wie Pailletten,
verringern den Strömungswiderstand und verhindern, daß Seepocken haften
bleiben.
Ihre Nachahmung und technische Nutzung wird seit Beginn der 1980er Jahre mit dem Ziel untersucht, den Treibstoffverbrauch von Schiffen und Langstreckenflugzeugen zu vermindern. Ende der Dekade gelingt es dem Ingenieur Dietrich Bechert an der TU Berlin, das Prinzip auf die Luftfahrt zu übertragen. Zusammen mit dem Technologiekonzern 3M entwickelt er eine selbstklebende Folie, deren Wirksamkeit an einem Airbus A340 getestet wird. Die allgemeine Anwendung scheitert jedoch an der Haltbarkeit des Materials bzw. der Automatisierung des Herstellungsprozesses.
Es gibt aber noch diverse andere Anwendungsbereiche. So wird beispielsweise 2009 unter der Leitung des Fraunhofer-Instituts für Fertigungstechnik und Angewandte Materialforschung (IFAM) bei der Hamburgischen Schiffbau-Versuchsanstalt GmbH (HSVA) ein praktischer Versuch durchgeführt, um die Wirksamkeit der Riblet-Strukturen im Bereich der Windenergie zu untersuchen. Das im des Verbundprojektes HAI-TECH durchgeführte Experiment führt zu einem positiven Ergebnis und belegt, daß Haifischhaut-Strukturen den Strömungswiderstand meßbar reduzieren, indem sie Turbulenzen vermindern.
Die im selben Jahr erfolgenden Versuche mit Schiffsrümpfen belegen, daß die geriffelten Lackschichten den Reibungswiderstand um über 5 % verringern.

Haifischhaut
Interessanterweise berichtet der Prof. George Lauder von der Harvard University im Februar 2012, daß die bisherige Nachahmung einen wesentlichen Aspekt der Haifischhaut offenbar übersehen hat, denn kann sich die gezahnte Oberfläche bewegen, spart sie noch viel mehr Energie als einfach auf starre Oberflächen aufgeklebt. Im wirklichen Leben krümmt und bewegt sich die Haut nämlich bei jedem Flossenschlag, weshalb Lauder und sein Team erstmals bewegte Haifischhaut im Strömungskanal analysieren.
Dabei finden sie heraus, daß die Oberflächenstruktur der Haie das Schwimmtempo um durchschnittlich 12 % steigert, allerdings nur, wenn sie sich auf natürliche Art krümmen und bewegen kann. Die Wissenschaftler glauben daher, daß die Haut nicht nur den Strömungswiderstand verringert, sondern zusätzlich Schub erzeugt, indem sie durch Wirbel den Sog vergrößert.
Mit Hilfe von Laserlicht kann sichtbar gemacht werden, wie genau das Wasser die flexible Haihaut umströmt. Demnach bildet sich an der Vorderkante der bewegten Hautstücke ein kleiner Wasserwirbel, wobei sich dieser Wirbel bei sandgestrahlter Haut deutlich weiter entfernt bildet als bei intaktem Gewebe. Die Mikrostrukturen auf der Oberfläche bewirken also, daß sich nah am Körper eine Region mit niedrigem Wasserdruck ausbildet.
Berichten vom Mai 2014 zufolge hat das Harvard-Team zwischenzeitlich mit Hilfe von 3D-Scans sowie 3D-Druckern eine künstliche Haifischhaut hergestellt, die Aufgrund der Beschränkungen des 3D-Drucks etwa 10-mal größer als die originalen Zähnchen des Makohais produziert werden, die als Vorlage dienten.

Bei den anschließenden Versuchen in einen Wassertank wird herausgefunden, daß die künstliche (starre) Haut bei der niedrigsten Strömungsgeschwindigkeiten den Strömungswiderstand um 8,7 % reduziert – bei der höchsten Strömungsgeschwindigkeit aber um 15 % mehr Widerstand produziert als eine glatte Fläche. Als jedoch begonnen wird, die Haut im Wasser zu bewegen, verbessert sich die Schwimmgeschwindigkeit um 6,6 %, wobei sich der Energiebedarf um 5,9 % reduziert.
Die im Netz einsehbare Studie von Lauder und seiner Kollegin Molly K. Gabler-Smith, die im August 2022 veröffentlicht wird, trägt den Titel ‚Ridges and riblets: Shark skin surfaces versus biomimetic models‘. Vergleichbare Strömungsphänomene sind aber auch von Vogel– und Insektenflügeln bekannt, was uns wieder zu den Flugzeugen zurückbringt.
Ende November 2019 ist klar, daß die Riblet-Folie der LH und der BASF auch unter realen Einsatzbedingungen hält, was sie verspricht. Eine Lufthansa Boeing 747-400 Passagiermaschine war im unteren Rumpfbereich mit der Folie ausgestattet worden und hatte im Liniendienst 1.500 Flugstunden absolviert, wobei die Emissionen des Flugzeugs durch den Einsatz der 500 m2 großen Folienfläche um 0,8 % gesenkt werden konnten.
Zudem wird im Sommer 2021 ein Boeing 777-Flügel der Fluggesellschaft SWISS, die die Lufthansa Technik und BASF bereits in der Entwicklungsphase von AeroSHARK unterstützt, über die gesamte Dauer eines Linienfluges zwischen Zürich und San Francisco präzise vermessen. Mit den gesammelten Daten können anschließend hochgenaue 3D-Modelle für Strömungssimulationen erstellt werden, auf deren Basis die Modifikation auf weitere Flugzeuge ausgeweitet werden kann.

Nachdem die Haifischhaut-Folie an die herausfordernden Temperatur- und Druckschwankungen in unterschiedlichen Höhen und die UV-Strahlung angepaßt und so konstruiert wurde, daß Schäden leicht ausgebessert werden können, soll sie nun an strömungsrelevanten Stellen der zehn LH-Frachtflugzeuge angebracht werden, um die Reibung um etwa 1 % zu vermindern und pro Jahr rund 3.700 Tonnen Treibstoff einzusparen. Es wird erwartet, daß die Folie etwa vier Jahre hält.
Im Februar 2022 gibt auch die Schweizer Luftfahrtgesellschaft Swiss International Air Lines (SWISS) bekannt, daß sie die AeroShark-Folie ab Jahresmitte schrittweise auf allen ihren zwölf 777-300ER-Maschinen aufbringen wird, nachdem die Ingenieure errechnet haben, daß 950 m2 auf einer Boeing 777 ausreichen, um den Luftwiderstand und den Treibstoffverbrauch um 1,1 % zu senken, was eine Einsparung von 4.800 Tonnen Kerosin pro Jahr bedeutet.
Die Partner Lufthansa und BASF arbeiten derweil daran, die AeroShark-Technologie weiterzuentwickeln und gehen davon aus, damit den Treibstoffverbrauch schließlich um bis zu 3 % gegenüber bestehenden Flugzeugen senken zu können. Und Anfang Februar 2023 hebt das weltweit erste Frachtflugzeug, eine Boeing 777 der Lufthansa Cargo, mit der AeroSHARK-Folie ab.
Die Idee, Riblets direkt in den Lack einzubringen, wird
ebenfalls weiterverfolgt – vom Flugzeuglackhersteller Mankiewicz und
dem Laserspezialisten 4JET. Die Unternehmen hatten 2019 einen
neuen Prozeß namens Laser Enhanced Air Flow (LEAF) vorgestellt,
bei dem ein Laserstrahl so modifiziert wird, daß bereits im Strahlfleck
des Lasers die gewünschte Struktur entsteht und pro Laserüberfahrt Hunderte
Riblets hergestellt werden können. Bis zur Serienreife soll es aber noch
drei bis vier Jahre dauern.
Und auch in den Triebwerken selbst könnte die Haifischhaut künftig Anwendung finden. Ein Forscherteam der TU Graz erprobt 2021 erstmals eine Riblet-Beschichtung im Übergangskanal zwischen Hoch- und Niederdruckturbine. Dabei kommen selbstklebende Kunststoff-Folien der Firma Bionic Surface Technologies aus Graz zum Einsatz – und auch hier kann eine Erhöhung des Wirkungsgrads nachgewiesen werden.
Im Juli folgt 2021 eine Studie von Wissenschaftlern der belgischen Universität
Gent, des Von Karman Institut für Strömungsmechanik (VKI),
der Katholieke Universiteit Leuven, des Königlichen
Belgischen Instituts für Naturwissenschaften und der Northwestern
University in Illinois, die nahe legt, daß mehrere Seevogelarten
dunkle Flügel entwickelt haben, um länger in der Luft bleiben zu können
(‚The evolution of darker wings in seabirds in relation to temperature-dependent
flight efficiency‘). Die Studie ist im Netz einsehbar.
Im Experiment werden mehrere Arten von Schwarzflügel-Seevögeln in einem Windkanal plaziert, wo ihre schwarzen Flügelfedern durch Strahlungswärme auf die gleiche Art erwärmt wurden wie auf natürliche Weise durch die Sonne. Dabei wird festgestellt, daß die Flugeffizienz der Vögel umso besser ist, je wärmer die Federn sind, wobei sich ihre Fähigkeit, ohne großen Höhenverlust zu gleiten, um bis zu 20 % verbessert.
Die Wissenschaftler stellen ferner fest, daß die zunehmende Menge an dem dunklen Pigment Melanin in den Flügeln von Seevögeln im Laufe der Zeit einer ähnlichen evolutionären Entwicklung folgte wie andere Merkmale, die mit einer verbesserten Flugeffizienz einhergehen.
Das Ergebnis stützt frühere Forschungsarbeiten, die gezeigt haben, daß die Erwärmung einer Tragfläche das Verhältnis von Auftrieb zu Widerstand erhöht. Die Erkenntnisse könnten daher als Leitfaden für bioinspirierte Innovationen in der Luftfahrt dienen, insbesondere im Niedriggeschwindigkeitsbereich, wo es eines Tages vielleicht eine zunehmende Anzahl von Fluggeräten mit schwarzen Flügeln geben wird.

Zurück zur allgemeinen Chronologie: Ebenfalls im Februar 2021 stellt
das internationale Design- und Innovationsstudio CRA-Carlo
Ratti Associati (CRA) gemeinsam mit dem Projekt Flyfire den
Prototyp für ein neues System zur Verbindung und Verwaltung großer Drohnenschwärme vor.
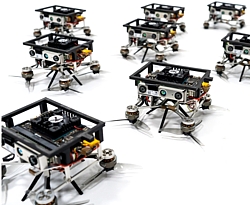
Flyfire ist ursprünglich ein vom SENSEable City Lab und dem Aerospace Robotics and Embedded Systems Laboratory (ARES Lab) des MIT im Jahr 2010 initiiertes Projekt, das darauf abzielt, jeden gewöhnlichen Raum in eine hochgradig immersive und interaktive Anzeigeumgebung zu verwandeln. Es verwendet eine große Anzahl von ferngesteuerten, sich selbst organisierenden Mikrohubschraubern, von denen jeder kleine farbige LEDs enthält und als intelligenter Pixel fungiert.
Durch digital gesteuerte Bewegungen führen die Hubschrauber synchronisierte Choreografien aus und werden zu einem immersiven, elastischen 3D-Display, das aus allen Richtungen erlebt werden kann. Es läßt sich aber nicht belegen, daß das Projekt damals auch praktisch umgesetzt worden ist – die zwischenzeitlich gegründete Firma Flyfire s.r.l. in Turin vertreibt aber ein hochmodernes und meistverkauftes Drohnensystem für Lichtshows, das auf der Kaiken Drohne basiert und mit der Drone Show Software kompatibel ist.

(Grafik)
Im Mittelpunkt des neuen Prototyps steht ein Netz namens Flying Drone Blanket, das in einem Koffer transportiert wird und mit dem Flotten von autonomen Quadrokoptern gleichzeitig starten können. Jede ‚Decke‘ hat die Form eines zusammengefalteten, halbstarren Lakens, das dann herausgezogen, entfaltet und flach auf den Boden gelegt wird. Anschließend können bis zu 16 systemeigene Quadrokopter-Drohnen in den quadratischen Aufnahmen der Decke befestigt werden, wobei alle Kopter gleichzeitig ihre Batterien über eine verbundene Stromquelle aufladen.
Die Decke ist modular aufgebaut, und mehrere davon können miteinander verbunden werden, um immer breitere Startbereiche zu schaffen, so daß bis zu 10.000 Drohnen gleichzeitig aufgeladen und gestartet werden können.Dies erlaubt eine breite Palette von Anwendungen, von Lichtshows über die Kartierung von Gebäuden mit 3D-Scans bis hin zur Erfassung der Luft- und Wasserqualität. Die Drohnen selbst verfügen über ein elegantes, schlankes Design, das eine Vielzahl von Funktionen unterstützt. Elementar ist dabei das ultrahelle mehrfarbige LED-Paneel auf der Unterseite.
Hinweis: Das Projekt Flyfire ist nicht zu verwechseln mit der 2018 gegründeten chinesischen Firma Harbin Flyfire Technology Co. Ltd., die auf die Herstellung von Rettungsfallschirmen für verschiedene Drohnenmodelle spezialisiert ist.
Das Deutsche Zentrum für Luft- und Raumfahrt DLR e.V. eröffnet
im März 2021 das Nationale Erprobungszentrum
für Unbemannte Luftfahrtsysteme in Cochstedt (Hecklingen), rund
35 km südlich von Magdeburg in Sachsen-Anhalt. Die feierliche Eröffnung
sollte eigentlich schon im letzten Jahr erfolgen, wurde wegen der Einschränkungen
der Pandemie aber als virtueller Event auf dieses Jahr verschoben.

(Montage)
Der ehemalige Flugplatz der Sowjets soll zukünftig als Freiraumlabor für Unternehmen dienen, die ihre Entwicklungen dort testen wollen, aber auch als Schmelztiegel für die 18 DLR-Institute, die in ganz Deutschland zum Thema der neuen Luftmobilität forschen. Neben der Entwicklung der Technologie sollen in Cochstedt auch Drohnen zertifiziert werden.
Da ab Mitte 2021 auch wieder Verkehrsflugzeuge landen sollen, eröffnet sich der Forschung ein Bereich, der sich nur selten unter Realbedingungen untersuchen läßt: Der Parallelbetrieb von tief und eher langsam fliegenden Drohnen und schnell und hochfliegenden Düsenjets. Insgesamt fließen 82 Mio. € an staatlicher Gesamtförderung in das Projekt, die zu 90 % der Bund bezahlt, wobei in einem ersten Schritt bis Ende 2022 rund 15 Mio. € für den Aufbau wissenschaftlicher sowie betrieblicher Infrastrukturen investiert werden.
Ebenfalls im März legt das Bundesministerium für Digitales und
Verkehr (BMDV) ein neues Förderprogramm auf,
das Start-Up-Firmen und Kommunen dabei unterstützen soll, innovative
Anwendungen und Konzepte für die unbemannte Luftfahrt voranbringen
und Ideen umzusetzen. Für das neue Förderprogramm stehen mehr als 11
Mio. € bereit.
Zudem wird im Mai dem Bundeskabinett der Aktionsplan der Bundesregierung für unbemannte Luftfahrtsysteme und innovative Luftfahrtkonzepte mitsamt Rechtsrahmen vorgelegt, mit dem Drohnen schon in wenigen Jahren als alltägliche Verkehrsträger etabliert werden sollen. Dies soll zukünftig in vier Modellregionen ausprobiert werden, zu denen neben Hamburg auch Aachen, Ingolstadt und der Norden von Hessen gehören.
Das 2019 gegründete Gemeinschaftsunternehmen Droniq GmbH, eine Kooperation der staatliche Deutschen Flugsicherung (DFS) und der Deutschen Telekom, welches das Projekt koordiniert, informiert Mitte September darüber, daß der Hamburger Hafen nun als Drohnen-Testgebiet genutzt wird. Auf über 30 m2 im Luftraum über dem größten deutschen Seehafens soll in mehreren Flugszenarien u.a. das sichere und koordinierte Zusammenspiel von bemanntem und unbemanntem Flugverkehr simuliert werden.
In dem dafür eingerichteten U-Space – einem räumlich abgegrenzter Luftraum, in dem spezielle Regeln und Verfahren den Drohnenverkehr koordinieren – starten umgehend die ersten Testflüge, auch außerhalb der Sichtweite des Drohnenpiloten. Nach dem Ende der Testflugphase sind im Herbst Flugwochen mit praktischen Vorführungen geplant. Das Verkehrsministerium fördert das Vorhaben mit einer knappen halben Million Euro.
Nur einen Monat später wird zudem am Deutschen Rettungsrobotik Zentrum (DRZ) in Dortmund ein zentrales Testlabor für Rettungsroboter eröffnet, das auch Trainingsmöglichkeiten für Drohnen bietet.
Im Februar 2022 veröffentlichen die Droniq GmbH und die DFS ihre Handlungsempfehlungen für die Einrichtung von U-Space Gebieten, die ab 2023 durch das Bundesministerium für Digitales und Verkehr (BMDV) eingeführt werden sollen.
Im Mai 2021 stellt DJI die programmierbaren
Drohne Tello Talent (o. RoboMaster TT) vor, als
Teil der Bildungsabteilung DJI Education. Das Unternehmen will mit dem
Paket, das eine winzige Drohne, eine intuitive mobile App und einen exklusiven
Lehrplan umfaßt, das Erlernen von Robotik und KI-Technologien fördern.
Die pädagogische Drohne soll zudem die Neugier und das
Selbstbewußtsein der Schüler fördern, um ihnen den Einstieg in Wissenschaft
und Technik zu erleichtern.

DJI Education war im vergangenen Jahr zunächst in Australien eingeführt worden und expandiert nun weltweit, um Schülern aller Leistungsstufen praktische Lernmöglichkeiten in den Bereichen Robotik und Programmierung zu bieten und gleichzeitig Lehrkräften die Werkzeuge an die Hand zu geben, die sie zur Unterstützung des Lernprozesses benötigen. Im Vorfeld hatte DJI bereits 2019 die auf Bildung ausgerichtete Tello EDU Drohne und den RoboMaster S1 Rover mit vier Rädern auf den Markt gebracht.
Jetzt wird die Bildungsplattform durch den kleinen, auf Open-Source-Technologie basierende RoboMaster TT ergänzt, der 98 x 92,5 x 41 mm mißt, nur 87 g wiegt und ein Upgrade des Tello EDU darstellt. Er ist mit vier Rotoren und äußeren Stoßfängern ausgestattet, hat Wi-Fi an Bord und verfügt über eine 5-MP-Kamera für Bilder und Videos. Der herausnehmbare Akku bietet eine Flugzeit von bis zu 13 Minuten pro Ladung.
Die Drohne verfügt über eine neue Erweiterungsplatine, die mehr KI-Anwendungen ermöglicht, als dies mit der bisherigen Hardware möglich war; es gibt einen Mikrocontroller, der Arduino, MicroPython und Scratch-Offline-Coding unterstützt; und die Schülerinnen und Schüler können auf dem 8x8-LED-Punktmatrix-Bildschirm-Modul Animationen erstellen, Buchstaben scrollen oder das RGB-Licht mit 256 LEDs dazu bringen, schnell oder langsam in verschiedenen Farben zu blinken. Außerdem enthält das Paket eine neue Schwarm-Software, die es erlaubt, mehrere Drohnen in Formation zu fliegen oder eigene Manöver zu erstellen. Der RoboMaster TT ist für 239 $ erhältlich.
(Entwurf)
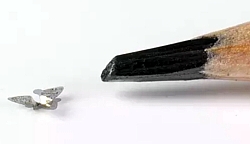
Im September 2021 berichten Wissenschaftler der Northwestern
University in Chicago über die Entwicklung des „kleinsten
menschengemachten Flugobjekts der Welt“. Ihr Ziel ist es, kleine
elektronische Systeme mit Flügeln auszustatten, um Umweltveränderungen
messen zu können. Als Inspiration für die mobilen Sensoren, dienen u.a.
die Propeller-Samen des Ahornbaums, die vom Wind getragen auf ihrem Flügel
durch die Luft segeln.
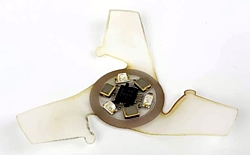
In ihrer Studie (‚Three-dimensional electronic microfliers inspired by wind-dispersed seeds‘), die dem Fachgebiet der Bioelektronik zuzuordnen ist, beschreiben die Experten um den Materialforscher John A. Rogers ihren Mikroflieger im Detail, der in etwa so groß wie ein Sandkorn sind. Er besteht demnach aus zwei Teilen: den millimetergroßen elektronischen Funktionskomponenten und den drei Flügeln. Einen Motor oder irgendeinen sonstigen maschinellen Antrieb gibt es nicht.
Die Ahorn-Aerodynamik stellt sicher, daß die Mini-Sensoren aus großer Höhe sehr langsam und kontrolliert nach unten segeln, um während der langen Flugzeit Daten zu sammeln. Tatsächlich fallen die künstlichen Flugsamen, die neben den Sensoren auch eine Energiequelle, eingebettete Datenspeicher und Mini-Antennen zur drahtlosen Kommunikation an Bord haben, noch langsamer als die natürlichen. Um zu verhindern, daß er die Kontrolle verliert und zu Boden stürzt, ist das Gewicht der Elektronik in der Mitte des Microfliers konzentriert.
Die künstlichen Flugsamen sollen in Zukunft hundert- oder tausendfach von Flugzeugen, Ballons oder Drohnen in großer Höhe abgeworfen werden, um mit einer Art Sensorennetz engmaschig Informationen etwa zur Feinstaubbelastung in bestimmten Regionen zu sammeln. In ersten Tests werden Sensoren eingesetzt, die Partikel in der Luft erkennen, außerdem pH-Sensoren zur Überwachung der Wasserqualität und Fotodetektoren zur Messung der Sonneneinstrahlung bei verschiedenen Wellenlängen.
Auch der Herstellungsprozeß ist günstig: Die Forscher stellen zunächst ein Vorprodukt für die fliegende Struktur in einer flachen Geometrie her. Dann kleben sie dieses auf ein leicht gedehntes Gummisubstrat. Sobald sich das gedehnte Substrat entspannt, kommt es zu einem kontrollierten Mikroprozeß, durch den die Flügel in genau definierte dreidimensionale Formen aufklappen. Um die Umwelt ihrerseits nicht zu belasten, wollen die Forscher für die Miniflieger zukünftig abbaubare Polymere, kompostierbare Leiter und auflösbare integrierte Schaltkreise einsetzen. Die entsprechenden Bioplastik-Rotoren und Sensoren lösen sich dann von selbst auf, sobald sie mit Wasser in Berührung kommen.
Im September 2021 gewinnt ein als Team CERBERUS (CollaborativE
walking and flying RoBots for autonomous ExploRation in Underground Settings)
bekanntes Konsortium die Subterranean Challenge (SubT
Challenge), einem Wettbewerb der Defense Advanced Research Projects Agency
(DARPA) des US-Verteidigungsministeriums, bei dem Teams aus Universitäten
und Unternehmen aus der ganzen Welt mit Robotern unterirdische Umgebungen
erkunden müssen.
![]()
(Grafik)
Diese Umgebungen bieten große Herausforderungen, wie z.B. fehlende Beleuchtung, fehlende GPS-Funktionen, tropfendes Wasser, dichter Rauch und ein unübersichtliches oder unregelmäßig geformtes Environment.
Zum Hintergrund: Die im September 2018 gestartete Challenge besteht aus einem Systemwettbewerb, bei dem die Teams mit physischen Robotern antreten, und einem virtuellen Wettbewerb in einer virtuellen Umgebung. Dabei gibt es vier Runden: den Tunnel Circuit (August 2019), der in einem Versuchsbergwerk in Pittsburgh, Pennsylvania, stattfindet; den Urban Circuit (Februar 2020) in einem verlassenen Kernkraftwerk in Elma, Washington; den Cave Circuit (November 2020, aufgrund COVID-19 nur virtuell); sowie die aktuelle Finalveranstaltung im September 2021, die Elemente aus allen drei Bereichen (Tunnel, urbaner Untergrund und natürliche Höhlennetzwerke) enthält und im Mega Cavern Komplex stattfindet, einer ehemaligen Kohlemine in Louisville, Kentucky.
Das Siegerteam CERBERUS, das sich den mit 2 Mio. $ dotierten Hauptpreis mit einer Multikopter/Vierbeiner-Kombination sichern kann, basiert auf der Zusammenarbeit zwischen der University of Nevada, Reno, der Norwegischen Universität für Wissenschaft und Technologie (NTNU), der ETH Zürich, der University of California, Berkeley, der University of Oxford sowie der Firma Sierra Nevada Corp. und dem Drohnenhersteller Flyability, dessen Spezialdrohnen bereits in der Übersicht 2015 präsentiert wurden.
CERBERUS gewinnt den Wettbewerb, indem es 23 von 40 Artefakten, die in den verschiedenen Bereichen plaziert worden waren, erfolgreich aufspürt. Neben den Multicopter-Drohnen werden vier bodengestützte, vierbeinige ANYmal C-Roboter eingesetzt, die vom ETH-Spin-off ANYbotics hergestellt wurden. Die einzelnen Einsätze lassen sich auf der Homepage subt-cerberus.org in Form von YouTube-Videos anschauen. Außerdem veröffentlicht das Team eine Reihe von Open-Source-Paketen, die auch dem Wettbewerb hervorgegangen sind.
Gewinner des mit 750.000 $ dotierten ersten Preises beim virtuellen Wettbewerb ist das Team Dynamo, über das es aber keine weiteren Informationen gibt.
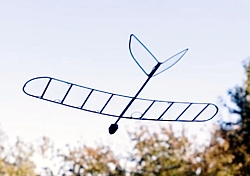
Im November 2021 zeigen die Blogs ein auf Kunststoffbasis 3D-gedrucktes Segelflugzeug, das mit Hilfe von Wasser und Seife funktioniert – und damit zu den technologischen Entwicklungen zählt, auch wenn die Innovation nicht in Richtung leistungsstarker Motoren und hocheffizienter Techniken geht, sondern eher zum Nachdenken darüber anregt, wie auch ganz einfache Dinge einen großen Unterschied machen können.
Das Konzept und drei verschiedene Segelflugzeugdesigns waren erst im Vormonat vom ViralVideoLab erfunden, konstruiert und umgehend auch als Videos gezeigt worden, darunter ein historisches Vorbild, das auf dem 1938 entwickelten DFS SG 38 Schulgleiter basiert. Das Selbstbauprojekt ist zwar eher ein Spielzeug für den Physikunterricht, aber seine Herstellung durch den 3D-Druck und seine beträchtliche Flugreichweite machen es zu mehr als nur einem Experiment.
Wenn der Rahmen des kleinen Plastikflugzeugs mit Flügeln und einem großen Heck mit breiten Öffnungen in eine Mischung aus Wasser und Waschmittel getaucht wird, entsteht in den Öffnungen ein dünner Film mit einer Schichtdicke von weniger als 1 µm, ähnlich wie bei einer Seifenblase, der es dieser ultradünnen Kreation ermöglicht, über eine ziemlich lange Strecke zu fliegen, ohne zu versagen. Das Interessante ist die Oberflächenspannung des Wassers, die so groß ist, daß sie zum Abdecken eines Flügels verwendet werden kann, wobei die Oberflächenspannung durch die Zugabe von Spülmittel sogar etwas herabgesetzt werden muß, damit sich ein stabiler Film bilden kann.
Die 2007 gegründete chinesische Firma XAG (anfangs:
XAIRCRAFT), die ab 2014 insbesondere Multirotor-Drohnen
für landwirtschaftliche Zwecke entwickelt und vertreibt, erweitert ihr
Angebot im November 2021 um die modulare V40 Agrar-Drohne,
die zwei kippbare Rotoren verwendet, um die Reichweite und die Sprüheffizienz
zu verbessern.

Die üblichen Multirotor-Drohnen können sich vorwärts, rückwärts, links und rechts bewegen, indem sie die Verteilung des Schubs zwischen ihren vier oder mehr Rotoren mit festem Winkel verändern. Die V40 verfügt hingegen über zwei nach vorne und nach hinten kippbare Arme, von denen jeder oben einen Rotor (einen Satz von zwei Rotorblättern) und unten eine Sprühdüse hat. Laut XAG ist das neue System wesentlich energieeffizienter als herkömmliche Multikopter.
Mithilfe des eingebauten GPS und eines nach unten gerichteten Geländeradarmoduls überfliegt die V40 zunächst ein Feld und kartiert dessen Grenzen und geographische Merkmale. Anschließend nutzt sie diese Daten, um autonom Sprüh- oder Aussäh-Flüge durchzuführen. Hierfür ist sie mit einem 16-Liter-Flüssigkeitsbehälter für Herbizide/Pestizide ausgestattet. Zudem gibt es einem 25-Liter-Granulatbehälter für Saatgut.
Auf Wunsch kann der Benutzer über eine Funkfernbedienung die manuelle Steuerung übernehmen. Um eventuell auftauchende Hindernisse zu umgehen, wird ein zusätzliches, nach vorne gerichtetes Radarsystem einsetzt. Angaben zur Batteriereichweite macht das Unternehmen keine.
Eine ähnliche Drohne mit nur zwei statt vier Rotoren und einer Kipprotor-Technologie hatte die chinesische Firma Zero Zero Robotics Anfang 2020 auf den Markt gebracht. Der V-Coptr Falcon ist allerdings nur eine kleine Kamera-Drohne (s.u. 2016).
Über die kabellose Stromversorgung von Drohnen habe ich bereits mehrfach
berichtet: Die US-Firma LaserMotive macht dies per Laserstrahl (s. 2010, 2012);
an der University of Nebraska-Lincoln wird ein Induktionssystem namens
NIMBUS entwickelt (2012);
das Berliner Startup SkySense Inc. arbeitet mit einem aus Platten bestehenden
Induktions-Ladesystem (2013);
Forscher des Imperial College London lassen eine Drohne über einer Stromquelle
schweben und sie durch die Luft induktiv aufladen, ebenso wie die Firma
Global Energy Transmission Corp. (2016);
und auch Ingenieure der Washington University arbeiten daran, ihre winzige
RoboFly-Drohne mittels Laserstrahl zu versorgen (2018).
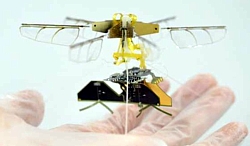
Im Dezember 2021 meldet die Fachpresse, daß nun auch Ingenieure des zentralen Forschungs- und Entwicklungslabors des Autoherstellers Toyota in Nagakute eine kleine Drohne entwickelt haben, die wie ein Insekt mit den Flügeln schlägt, um sich in der Luft fortzubewegen.
Da Fluggeräte dieser Größe normalerweise nicht allzu weit kommen, weil sie nicht in der Lage sind, schwere Batterien zu tragen, baut das Entwicklerteam um Takashi Ozaki der Drohne statt dessen einen Wandler ein, der ein äußeres hochfrequentes elektromagnetisches Feld in Strom für den Antriebsmotor und die Elektronik an Bord umwandelt.
Kernbauteile der gerade mal 1,8 g schweren Drohne sind ein Aktuator, der aus einem einkristallinen piezoelektrischen Material besteht, das nur wenig Energie verbraucht und die beiden Flügel flattern läßt (auf dem Foto sieht es aus, als hätte die Drohne mehr als zwei Flügel), sowie eine 5 GHz Dipolantenne, die die hochfrequente Energie einfängt. Wie weit sich das künstliche Insekt vom Hochfrequenz-Sender entfernen kann, ohne daß die Stromerzeugung leidet, haben die Entwickler bisher noch nicht mitgeteilt.
Die Drohne bekommt ihren Strom zwar drahtlos, doch die Steuerbefehle werden noch über ein hauchdünnes Kabel übertragen. Das soll in Zukunft durch einen Funkempfänger ersetzt werden.
Im Dezember 2021 wird eine Drohne vorgestellt, die
sowohl über Propeller als auch über Laufketten verfügt – und die im Rahmen
eines EU-Projekts unter der Leitung des polnischen Unternehmens Cervi
Robotics/Dronehub entwickelt wird. Weitere Partner sind die
LUT University (Finnland), Rectangle (Polen), Gina Software (Tschechische
Republik), Bladescape (Österreich), Brimatech Services (Österreich) und
NTT Data (Spanien).

Der ziemlich gebastelt aussehende Prototyp des HUUVER (für ‚Hybrid UAV-UGV for Efficient Relocation of Vessels‘), der durch die Luft fliegt und über den Boden rollt, wiegt 23 kg und ist 137 cm lang, 84 cm breit und 56 cm hoch. Bei Einsätzen am Boden nutzt er ein Paar verbundener Laufflächen, wobei die Ladung seiner Lithiumbatterie für bis zu zehn Stunden Betriebszeit ausreicht.
Wenn das Fahrzeug in die Luft gehen muß, startet es seine acht horizontalen Propeller, die bei Nichtgebrauch auf den Laufflächen ausgerichtet und von diesen umgeben sind. Anschließend ist er bis zu 20 Minuten lang flugfähig. Bediener können die Drohne fernsteuern und dabei in Echtzeit die Aufnahmen der kardanisch montierten 4K-Kameras und einer Wärmebildkameras betrachten. Mit einem LiDAR-Sensor und gesteuert von einem Galileo-Satellitenpositionierungssystem kann der HUUVER aber auch autonom fliegen.
Dem Bericht zufolge sei die Forschungs- und Entwicklungsphase des Projekts kürzlich zu Ende gegangen und nun habe die Kommerzialisierungsphase begonnen. Es gibt noch keine Informationen darüber, wann die hauptsächlich für industrielle, militärische und Such- und Rettungseinsätze bestimmte Drohne verfügbar sein wird – was auch durch die Grafiken auf der Projekt-Homepage bestätigt wird.
Zu Erinnerung: Ein strukturell identisches, aber für den Consumer-Markt gedachtes Modell mit dem Namen B-Unstoppable hatte Witold Mielniczek schon im Jahr 2013 über eine Kickstarter-Kampagne finanzieren wollen – leider erfolglos (s.d.). Trotzdem sind inzwischen online verschiedene Nachahmerprodukte zu finden, wie beispielsweise der X-Tankcopter, der für knapp 90 € angeboten wird (Stand 2023).

(mit Kamera)
Auch bei den Kameradrohnen bzw. deren Designs gibt es
in diesem Jahr einige interessante Neuigkeiten. So stellt Sony auf der
(diesmal) virtuellen CES
2021 Mitte Januar eine neue Profi-Drohne namens Airpeak
S1 vor, die mit einer Alpha-Vollformatkamera ausgestattet ist
und sich vor allem an Videoproduzenten aus dem Profi-Bereich richtet.
Der Quadrokopter besitzt zwei Landekufen, die sich nach dem Start nach
oben einklappen, um in den Videoaufnahmen nicht im Bild zu erscheinen.
Mit der Marke Airpeak steigt der japanische Unterhaltungs- und Elektronikkonzern in das umkämpfte Segment kleiner Flugdrohnen ein. Die Airpeak S1 wird tatsächlich ab Weihnachten ausgeliefert, ohne Kamera und Gimbal, dafür aber zum stolzen Preis von rund 9.000 $.
Die Drohne selbst wiegt ohne Akkus rund 3,1 km, das maximale Startgewicht beträgt rund 7 kg. Die maximale Flugzeit hängt stark von der Zuladung ab – ohne zusätzliches Gewicht beträgt sie maximal 22 Minuten, mit einer schweren Nutzlast wie einer Sony Alpha 7S III Kamera samt Objektiv und Gimbal nur noch 12 Minuten. Durch den Wechselakku ist die Unterbrechung der Flugzeit für den Austausch der Stromversorgung aber relativ kurz.

(Grafik)
Im Juli kursieren in den Blogs Berichte über ein beim World Intellectual Property Office (WIPO) eingereichte Patent des chinesischen Handyherstellers Vivo , das ein Smartphone mit einer eingebauten winzigen Kameradrohne zeigt, die sich auf Kommando daraus hervor schiebt und dann losfliegt, um Fotos zu schießen. Was in den Kommentaren u.a. als völlig absurd bezeichnet wird.
Jedenfalls paßt die Drohne, die über zwei Hochformatkameras auf der Oberseite und eine Hauptkamera auf der Vorderseite verfügt, genau in das Gehäuse des Telefons. Die faszinierende Idee hat den Industriedesigner Sarang Sheth, Chefredakteur von Yanko Design, veranlaßt, dieses einzigartige Vivo-Smartphone für LetsGoDigital in einer 3D-Visualisierung zum Leben zu erwecken, aus der auch die hier gezeigte Abbildung stammt.

(Grafik)
Auch nicht viel größer als ein Smartphone ist das Konzept Drone
1 der Designerin Maya Prokhorova, das im Oktober
mit dem Red Dot Concept Design Award 2021 ausgezeichnet wird.
Die faltbare Drohne für unterwegs verfügt über eine 4K-Kamera für Foto- und Videoaufnahmen in hoher Qualität, wiegt nur 200 g und ist mit allen fortschrittlichen Sensoren ausgestattet, um durch enge Räume zu navigieren oder den Wegpunkten über die App auf dem Handy zu folgen.
Um sie zu nutzen, reicht es, sie in zusammengeklapptem Zustand aus der Tasche oder dem Rucksack zu nehmen, die beiden Hälften mit einer Klickbewegung zu drehen – und schon ist die Drohne flugbereit. Eine Umsetzung ist bislang nicht erfolgt.
Weiter mit den Elektro- und Solarfluggeräten 2021 ...