Buch der Synergie
| Blättern |
 TEIL
C
TEIL
C
Elektro- und SolarfluggerÄte
2023 (C)
Technologische
Entwicklungen
Im Januar 2023 berichten Forscher der chinesischen Northwestern Polytechnical University (NPU) in Xianyang über ihre Versuche, ein fliegendes Gerät mit Strom zu versorgen, während es sich fortbewegt - wozu sie einen Laser nutzen. An der Unterseite der Drohne befindet sich ein photoelektrischer Wandler, der das Laserlicht in Strom umwandelt und das Fluggerät so mit genügend Energie versorgt, um in der Luft zu bleiben.

Am Boden befindet sich ein adaptiver Zielverfolgungslaser, der an einer kardanischen Aufhängung befestigt ist, um sich als Tracker flüssig und so gut wie ruckelfrei zu bewegen. Ein visueller Verfolgungsalgorithmus sorgt dafür, daß der Laserstrahl dem Fluggerät folgt, außerdem gibt es eine automatische Hinderniserkennung. Um die Absorption durch die Atmosphäre, etwa durch leichten Nebel, auszugleichen, modifizierten die Forscher die Laserenergie. Gleichzeitig verhindert dies die Verschwendung von Energie. Befindet sich die Drohne nahe der Laserquelle, reduziert sich die Leistung. Und gerät ein Hindernis in den Strahl, verringert sich die Laserenergie auf null, um Schäden zu vermeiden. Erkannt wird dies, indem der Strahl teilweise reflektiert wird.
Das NPU-Team testet das System mit einem kleinen Quadrokopter erfolgreich in Innenräumen mit und ohne Licht, ebenso wie draußen bei Tageslicht, nachts und bei bewölktem Himmel. In dem veröffentlichten Video fliegt die Drohne dabei in ca. 10 m Höhe.
Zwar liegt der Wirkungsgrad bei der drahtlosen Energieübertragung am Sender zwischen 50 % und 85 %, und die Empfangsseite verliert noch einmal ungefähr 50 %, doch im Gegenzug muß die Drohne niemals landen, es sei denn für die technische Wartung und bei Defekten. Und da Laser eine enorme Reichweite haben, funktioniert das System vermutlich auch bei Flügen in großen Höhen. Damit könnten eines Tages Lufttaxis und Elektroflugzeuge aufgeladen und so ihre Reichweite deutlich verlängert werden, ebenso wie sich luftgestützte Kommunikations-Plattformen errichten ließen, als eine äußerst günstige Unterstufe von Satelliten.
Es gibt bereits diverse Vorläufer, die sich mit der Stromversorgung durch Laser befassen. So haben beispielsweise Forscher des Marshall Space Flight Center der NASA bereits im Oktober 2003 den erfolgreichen Testflug eines 300 g leichten Modellflugzeugs gemeldet; im März 2006 war an der japanischen Kinki University ein 800 g schwerer Flieger mit einem Laserstrahl betrieben worden; und 2009 wurde über entsprechende Arbeiten am Rensselaer Polytechnic Institute in New York berichtet. Im Jahr 2010 folgte die Firma LaserMotive, die 2012 ihre laserbetriebene Stalker-Drohne vorführte.
Ähnliche Technologien werden auch anderswo verfolgt. So stellen Entwickler
der University of Colorado Boulder (CU Boulder)
im Juli 2023 ein neuartiges, widerstandsfähiges photomechanisches
Material vor, das Lichtenergie in mechanische Arbeit umwandelt,
ohne daß als nutzloses Nebenprodukt Wärme entsteht. Den Wissenschaftlern
nach stellt dies eine Alternative zu elektrisch angetriebenen Aktuatoren
dar, denn das Material läßt sich z.B. nutzen, um Objekte aus der
Ferne mit Antriebsenergie zu versorgen, etwa eine Drohne, deren Rotoren
von einem Laserstrahl angetrieben werden.
Die Direktumwandlung von Licht in mechanische Verformung erfolgt durch winzige organische Kristalle, die in ein Polymermaterial eingebettet sind, das aufgrund seiner ebenso winzigen Löcher einem Schwamm ähnelt. Die Ausrichtung der Kristalle ermöglicht es diesen, bei Lichteinwirkung Aufgaben auszuführen, wie etwa das Anheben von Gegenständen. Dabei können die Kristalle Objekte bewegen, die viel größer und schwerer sind als sie selbst. So hebt ein Kristallstreifen mit einem Gewicht von 0,02 mg beispielsweise eine 20 mg Nylonkugel an, also das 10.000-Fache seiner eigenen Masse.
Als nächstes will das Team die Kontrolle über die Bewegung des Materials verbessern, das sich derzeit durch Licht nur Verbiegen läßt - und in den ursprünglichen Zustand zurückkehrt, wenn die Lichtquelle versiegt. Zudem soll die Menge an erzeugter mechanischer Energie im Vergleich zur Lichtenergie maximiert werden. Der aktuelle Bericht der CU Boulder trägt den Titel ,Photo-actuators via epitaxial growth of microcrystal arrays in polymer membranes’.
Ebenso interessant ist, daß die zum US-Militär gehörende Forschungsbehörde DARPA im September 2023 ein neues Programm namens Persistent Optical Wireless Energy Relay (POWER) ankündigt, das die Nutzung von Lasern vorsieht, die von luftgestützten Plattformen weitergeleitet werden, um Maschinen in Tausenden von Kilometern Entfernung mit Strom zu versorgen. Zu den Zielen dieses Projekts gehört der Aufbau belastbarer und lichtschneller Energienetze durch die Entwicklung sogenannter Power-Beaming-Relais.

(Grafik)
Die Technologie soll dabei helfen, Energie aus verschiedenen Quellen, auch aus dem Weltraum, zu erschließen und für Verbraucher nutzbar zu machen. Durch die an Flugobjekten angebrachten Power-Beaming-Relais soll die Energieübertragung zudem in große Höhen verlagert werden, wodurch diese weitaus effizienter erfolgen soll, als in der dichten und turbulenten unteren Atmosphäre.
Die Behörde hebt dabei auch die Rolle Flugverkehrs hervor, der zugleich davon profitieren soll: Da die neuartigen Energieübertragungs-Relais von Flugobjekten getragen werden, könnten diese für ihren Betrieb selber einen Teil der Energie nutzen. Das Projekt ist insgesamt in drei Phasen unterteilt, wovon die erste voraussichtlich in 20 Monaten abgeschlossen sein soll. Dabei wird eine Übertragung von 10 kW an optischer Energie zwischen zwei Stationen auf dem Erdboden angestrebt, die 200 km voneinander entfernt sind.
Die zweite Phase beginnt Anfang 2025 mit einer offenen Ausschreibung und wird sich auf die Integration der Relaistechnologien in eine bestehende Plattform für eine luftgestützte Demonstration mit geringer Leistung konzentrieren. Wann diese enden und die dritte Phase starten werden, ist bislang nicht bekannt.
Ebenfalls im Januar 2023 berichten die Fachblogs über
verschiedene Forschungsvorhaben und Projekte im Zusammenhang mit sicheren
Drohnenflügen. So entwickeln Forscher verschiedener Fraunhofer-Institute in
Zusammenarbeit mit IT-Sicherheitsexperten der Firmen esc Aerospace und ESG
Elektroniksystem- und Logistik-GmbH im Projekt AKIRA (0.
AKIRA-UTM) eine bodengestützte Radarplattform zur Detektion von Drohnen
und anderen unbemannten Flugobjekten im urbanen Raum. Ziel ist die
zuverlässige permanente Überwachung aller kooperativen und nicht-kooperativen
Flugobjekte bis zu einer Flughöhe von 100 m.
Zeitgleich startet das Forschungsvorhaben IDEALS (Intelligente Drohnenkoordination für effiziente automatisierte Luftlogistik) mit einer Laufzeit von zwölf Monaten, bei dem intelligente Netze multipler, heterogener und autonomer Transportdrohnen für den Start- und Landebetrieb an den Vertiports von Logistikzentren untersucht wird. Konsortialführer des Forschungsvorhabens ist das Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme (IVI), als Partner fungiert die Technische Hochschule Ingolstadt (THI).
Das Fraunhofer-Institut für Nachrichtentechnik, Heinrich-Hertz-Institut (HHI) erforscht wiederum neue Kommunikationsprotokolle für einen stabilen Datenfluß zwischen Drohnen und Steuerungssystemen am Boden. Im Rahmen des Kooperationsprojekts SUCOM wollen die Forscher gemeinsam mit dem Drohnenhersteller Wingcopter, der Emqopter GmbH und der CiS GmbH neue Kommunikationsprotokolle entwickeln, die gegenüber ruckelnden Datenströmen unempfindlich sind.
Kontextbezogen sei auf ein neues System des Massachusetts Institute of Technology (MIT) verwiesen, das auf eine Verzögerungstaktik setzt, um Drohnenkollisionen zu verhindern. Die Software namens MADER, die im März 2023 vorgestellt wird, verhindert in Kombination mit einem Navigations- und Kommunikationssystem effektiv unbeabsichtigte Zusammenstöße, indem jedes im Schwarm operierende Fluggerät die anderen Mitglieder ständig über den gerade eingeschlagen Kurs informiert. Sowohl in Simulationen als auch bei Flugexperimenten mit echten Drohnen wird eine 100 %-ige Erfolgsquote bei der Vermeidung von Kollisionen erreicht.
Im Mai folgt der Bericht über ein Team der Technischen Universität München um Prof. Stefan Leutenegger, das Algorithmen und Software entwickelt, die es Drohnen ermöglichen, unter Verarbeitung von Sensordaten die 3D-Struktur ihrer Umgebung zu erfassen - und damit eine räumliche KI zu entwickeln, wie sie bei Menschen von Natur aus besteht.
In diesem Kontext soll hier auch das im November gestartete Forschungsvorhaben ADAM (Advanced Air Space Mapping) mit einer Laufzeit von 36 Monaten erwähnt werden, das mit Hilfe neuer Kartierungsmethoden die Umfelderfassung im unteren Luftraum verbessern und so die Sicherheit beim autonomen Fliegen in der Stadt erhöhen soll. Das Vorhaben wird mit 2,92 Mio. € durch das Bundesministerium für Digitales und Verkehr (BMDV) gefördert und von neun Partnern unter der Federführung des Fraunhofer-Instituts für Verkehrs- und Infrastruktursysteme (IVI) durchgeführt.
Eine weitere Meldung im Januar 2023 betrifft ein Team, das am Lincoln Laboratory des Massachusetts Institute of Technology (MIT) an einem geräuscharmen Flugzeug mit Ionenantrieb arbeitet, über das ausführlich in der Jahresübersicht 2018 berichtet wurde.

Schleifenpropellern
Die Wissenschaftler hatten sich in den vergangenen Jahren auch mit der Frage beschäftigt, ob der störende Lärm von Multirotoren durch anders geformte Propeller gemildert werden könnte. Dieser Lärm wird oft als ,heulend’ beschrieben, weil er größtenteils im gleichen Frequenzbereich liegt wie das Schreien eines Babys. Und daß der Mensch am empfindlichsten auf Geräusche zwischen 100 Hz und 5 kHz reagiert, ist evolutionär sinnvoll, denn in diesem Bereich hören wir die Vokallaute, die für die verbale Kommunikation entscheidend sind.
Inspiriert von Ideen aus den frühen 1900er Jahren und während des Zweiten Weltkriegs für Flugzeuge mit Ringflügeln werden mit 3D-Druckern eine Reihe von Propeller-Iterationen erstellt, und nach einigen Versuchen findet das Team tatsächlich ein Design, das nicht nur den Gesamtlärmpegel, sondern insbesondere den Lärm im Bereich von 1 - 5 kHz reduziert und eher wie eine rauschende Brise als ein Propeller klingt.
Darüber hinaus erhöht die Schleifenform nicht nur die strukturelle Stabilität, sondern verringert auch die Gefahr, daß die Propeller abscheren, brechen oder an Gegenständen hängen bleiben, auf die sie treffen. Allerdings handelt es sich um ziemlich komplexe Formen, die viel schwieriger herzustellen sind als Standardpropeller, die billig und einfach im Spritzgußverfahren produziert werden.
Zum jetzigen Zeitpunkt ist unklar, ob derartige Konstruktionen in größerem Maßstab relevant sein könnten, um herkömmliche Propeller an Starrflüglern oder sogar an elektrischen VTOL-Lufttaxis zu ersetzen. Die Frage dabei ist, welche Frequenzen diese größeren Propeller im Audiospektrum besetzen werden. Experimentieren kann man auch selbst, denn im Februar erscheinen auf printables.com Videos sowie downloadbare Vorlagen für den 3D-Drucker von dem User Ashton alias STRIKING FPV.
Der neuartigen Propeller, der in Wirklichkeit eine ,alte Kamelle’ ist, die unter dem Namen Toroidalpropeller seit über 100 Jahren bekannt ist (ich könnte ein komplettes, eigenes Kapitel darüber schreiben) wird auch im maritimen Bereich eingesetzt, worüber ich in der Jahresübersicht 2023 der Elektro- und Solarschiffe berichte (s.d.).
Das MIT-Team bekommt trotzdem ein Patent für das Design, was wohl ein Beleg dafür ist, wie schlampig die Recherchen der zuständigen Behörden sind. Als Beweis nenne ich hier Charles Myers aus Manchester, der den Propeller Anfang der 1890er Jahre erfunden und erfolgreich auf mehreren englischen Dampfschleppern und Passagierfähren erprobt hat, sowie in den 1930er Jahren Friedrich Honerkamp, der einen Toroidventilator, bzw. Rene Louis Marlet, der einen toroidalen Flugzeugpropeller patentiert hat. Und auch danach lassen sich Dutzende von Versuchen, Designs und erfolgreichen Umsetzungen finden.
Aero-Robot
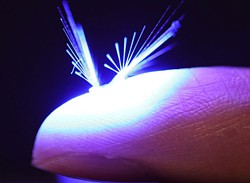
Aus Finnland wird in diesem Monat über einen neuen Bestäubungs-Roboter berichtet, der einen Pollen-Transport per Wind und eine Steuerung per Licht ermöglicht. Der von Wissenschaftlern der Universität Tampere entwickelte Flying Aero-Robot, der von Löwenzahnsamen inspiriert ist, ist winzig, hoch porös und wiegt gerade einmal 1,2 mg. Er besteht aus einem lichtempfindlichen flüssigkristallinen Elastomer, das bei Anregung durch einen Laserstrahl oder LED-Licht seine Form verändert und sich so in einem gewissen Rahmen lenken läßt, zumindest aber seine Geschwindigkeit ändert.
Die Machbarkeits-Experimente des finnischen Teams zeigen, daß der Roboter ein wichtiger Schritt in Richtung realistischer Anwendungen darstellt, obwohl noch viele Probleme gelöst werden müssen, wie sich z.B. der anvisierte Landeplatz präzise ansteuern läßt und wie man die Geräte wiederverwendbar oder biologisch abbaubar macht. Im Erfolgsfall sollen in Zukunft Millionen davon Pollen tragen und nur durch Licht in Plantagen mit Obstbäumen gesteuert werden.
Das Projekt läuft unter dem Namen ,FAIRY – Flying Aero-robots based on Light Responsive Materials Assembly’, der Artikel darüber unter dem Titel ,Dandelion-Inspired, Wind-Dispersed Polymer-Assembly Controlled by Light’ war bereits im Dezember 2022 veröffentlicht worden und ist im Netz einsehbar.

der EPFL
Die Eidgenössische Technische Hochschule Lausanne (EPFL) stellt im Januar eine Crazyflie genannte Drohne vor, die sich wie eine Fledermaus per Schall orientiert. Die Drohne ist mit einem piezoelektrischen Summer ausgestattet, der im Zentrum des Flugobjekts montiert ist, während am Ende der vier Arme mit den Antriebsmotoren kostengünstige MEMS-Mikrofone installiert sind, die die Reflexe der Summgeräusche aufnehmen, die mit kurzen Unterbrechungen abgestrahlt werden.
Daraus entwirft der an Bord befindliche Mikrocontroller ein Bild der Umgebung, so daß die Drohne durch einen dreidimensionalen Parcours fliegen kann, ohne hierfür Kamera, LiDAR oder Radar zu benötigen. Wenn ein starker Reflektor wie eine Wand in der Nähe ist, wird der Schall reflektiert und interagiert mit dem direkten Schall an jedem Mikrofon. Je nach Entfernung und Frequenz, schwächen oder verstärken sich diese beiden Signale gegenseitig. Daraus ermittelt der Controller die Entfernung des Hindernisses. Da es mehrere Mikrofone gibt, läßt sich auch der Winkel bestimmen, unter dem sich der Reflektor in Bezug auf die Drohne befindet.

(Montage)
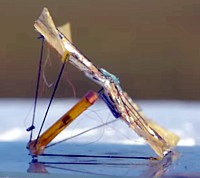
Der Einsatz von Drohnen für die Aussaat aus der Luft, wie er in den bisherigen Jahresübersichten schon mehrfach dargestellt wurde, ist eine gute Idee - aber die Samen könnten leicht weggeweht werden, wenn sie an der Oberfläche des Bodens bleiben. Im Februar 2023 stellt ein Team der Carnegie Mellon University als Lösung einen Samenträger vor, der seine Saatgutladung mit einer Art Korkenzieher in den Boden befördert und von der Pflanzengattung Erodium inspiriert ist, die eine einzigartige Strategie zum Überleben in trockenen Klimazonen entwickelt hat.
Bei diesen Pflanzen befinden sich die Samen in einem dünnen Stengel, der sich von der Hauptpflanze ablöst und auf den Boden fällt. Wenn er durch Regen oder hohe Luftfeuchtigkeit befeuchtet wird, entfaltet er seinen Sporn, um sich zunächst aufzurichten und dann sich selbst und seinen Samen in den Boden zu bohren.
Das E-seed genannte Konstrukt funktioniert auf gleiche Weise, ist allerdings aus feuchtigkeitsempfindlichem Weißeichenfurnier gefertigt. Es unterscheidet sich vom Erodium-Samenstengel auch dadurch, daß es nicht nur einen, sondern drei Sporne hat, die ihm dabei helfen, auf relativ flachem Boden in eine aufrechte Position zu gelangen. Die Technologie wurde in Feldversuchen auch zur Ausbringung von Nicht-Saatgut wie Dünger und Nematodenwürmern eingesetzt, die Schadinsekten abtöten.
Die Herstellung des Samenträgers ist derzeit ein fünfstufiger Prozeß, der chemisches Waschen und mechanisches Formen umfaßt, doch die Wissenschaftler arbeiten bereits daran, ihn für den Einsatz im industriellen Maßstab anzupassen. Das E-Saatgut könnte dann mit Hilfe von Drohnen an schwer zugänglichen Stellen ausgebracht werden, etwa auf abgelegenen Feldern oder in Gebieten mit Erdrutschen, die stabilisiert werden müssen. Die aktuelle Studie trägt den Titel ,Autonomous self-burying seed carriers for aerial seeding’.
In ähnlichem Zusammenhang: Ebenfalls nach biologischem Vorbild gestaltet sind die Bio-Gleiter, die an der Eidgenössischen Materialprüfungs- und Forschungsanstalt (Empa) entwickelt wurden und über die im Mai 2023 berichtet wird. Dabei handelt es sich um kostengünstige und nachhaltige Sensoren und Fluggeräte, die energiesparend, engmaschig und autonom auch in unzugänglichen Gebieten wichtige Umweltdaten ohne Risiko aufzeichnen können.

der Empa
Inspiriert sind die biologisch abbaubaren Gleiter von der Javagurke (Alsomitra macrocarpa), einer asiatischen Liane, die ihre Samen mit transparenten Flügeln vom Wind verbreiten läßt. Die Inspiration betrifft einerseits das Design der Drohnen, andererseits aber auch ihre Fähigkeit, sich nach ihrem Lebensende biologisch abzubauen. Für ihre Arbeit sind die Gleiter mit intelligenten Sensoren ausgestattet, die wichtige Ökoparameter in Echtzeit erfassen, darunter Informationen über die Bodenfeuchtigkeit, den Säuregehalt und andere Umweltfaktoren.
Die Gleiter bestehen aus Kartoffelstärke, etwas Holzabfall und eine Färberflechte - und lassen sich recht einfach in die Form der Gurkensamen bringen. Mit einer Flügelspannweite von 14 cm und einem Gewicht von nur 1,5 g – inklusive der Sensoren – können die Gleiter besonders langsam fliegen, um die optimale Datenmenge zu sammeln.
Die Sensorik der Gleiter, die durch eine Schicht aus nanofibrillierter Zellulose geschützt wird, reagiert auf die Feuchtigkeit in der Atmosphäre. Sobald es regnet, öffnet sich der Schutzfilm wie bei einer Blume und der Sensor beginnt mit dem Datensammeln. Ist dieser Vorgang abgeschlossen, zersetzt sich der Gleiter innerhalb weniger Wochen. Ob dies auch für die Bestandteile der Sensoren gilt, geht aus den Berichten nicht hervor, ebenso wenig wie etwas über ihre Energieversorgung, die zur Übermittlung der gesammelten Daten erforderlich ist.
Bei der aktuellen Recherche zeigte sich, daß ein Forschungsteam der University of Washington (UW) bereits im März 2022 eine Studie darüber veröffentlicht hat, wie Pusteblumen - d.h. Löwenzahn (Taraxacum sect. Ruderalia) im Fortpflanzungsmodus - als Vorbild für die Fernerkundung in der Landwirtschaft genommen werden kann. Um schnell und unkompliziert ganze Netzwerke aus Sensoren aufbauen zu können, hat das Team Umweltsensoren entwickelt, die in Nachahmung der haarigen Flugschirme (Pappus) über ein weites Gebiet in den Wind gestreut werden können.

Da die Sensoren etwa 30-mal schwerer sind als die nur ein 1 mg leichten Samen der Pusteblume, muß der Pappus größer und steifer sein. Um das Gewicht der kleinen Flugkörper gering zu halten, experimentiert das Team mit über 75 verschiedenen Designs. Mit den besten Varianten können die Sensoren selbst bei einer leichten Brise bis zu 100 m weit von ihrem Auslösepunkt entfernt schweben, wie Tests auf dem Universitätscampus zeigen.
Um schnell ein Sensornetz über große Flächen aufzubauen, könnten Drohne verwendet werden, die bei einem einzigen Flug Tausende dieser Geräte freisetzen, die alle ein wenig anders vom Wind getragen werden. Einmal auf dem Boden, aktivieren sich die bis zu vier einzelnen Sensoren, um Informationen über Temperatur, Luftfeuchtigkeit, Druck und Licht aus einem Umkreis von 60 m zu sammeln und dann drahtlos zurückzusenden.
Die Sensoren benötigen keine Batterien, sondern werden durch kleine, leichte Solarzellen betrieben, was die Herausforderungen mit sich bringt, daß das Gerät richtig herum aufgestellt werden muß, um den Kondensator aufzuladen, damit die Sensoren auch nachts funktionieren. Den Forschern gelingt es, diese so zu konstruieren, daß sie sich zumindest in 95 % aller Fälle in die richtige Richtung drehen. Irgendwann könnte es sogar möglich sein, Sensoren zu entwickeln, die sich nach dem Auftreffen auf dem Boden bewegen, so daß sie sich bestimmten Bereichen, die von besonderem Interesse sind, noch weiter nähern können.
Ein Nachteil ist, daß es bei einer so großen Anzahl von Sensoren, die über ein weites Gebiet verteilt sind, es fast unmöglich ist, sie alle wieder einzusammeln – weshalb auch dieses Team daran arbeitet, biologisch abbaubare Sensoren zu entwickeln.
Von der UW folgt ein weiterer Bericht im September 2023. Hier wird inzwischen an Mikrodrohnen gearbeitet, die in der Luft ihre Form wechseln und so unterschiedliche Flugeigenschaften ausnutzen können. Mittels Origami-Falttechnik und einem integrierten Mechanismus wechseln die 414 mg schweren Roboter, die ohne Batterie und eigenen Antrieb funktionieren, von dem Flugmodus in einen Fallschirmmodus. Ziel ist es, diese winzigen Fluggeräte wie Blätter eines Baumes von Trägerdrohnen abzuwerfen und sie vom Wind weiter tragen zu lassen.
Die Microflier genannten Roboter sind etwa so groß wie eine Briefmarke und bestehen hauptsächlich aus einer flachen und faltbaren Platine, einem Aktuator, der mit nur 200 Millinewton Kraft eine Drohne in 25 Millisekunden transformiert, einem Drucksensor sowie einem Controller mit Bluetooth-Chip, der über Sonnenenergie angetrieben wird. Sie sollen in Massen abgeworfen werden, um nach dem Zufallsprinzip drahtlose Netzwerke zu bilden und Sensordaten an ein Edge-Gateway zu übertragen.
Auch bei diesen Ausfertigungen soll bereits eine leichte Brise ausreichen, um die Roboter bis zu 100 m weit durch die Lüfte zu tragen, wenn er aus einer Höhe von 40 m fällt. Dazu werden sie in den flachen Blatt-Modus versetzt, der für Fortbewegung und Auftrieb geeignet ist. Im Fallschirmmodus falten sich die Platinen zu einer konkaven Form und die Roboter segeln langsam zu Boden.
Die derzeitigen Prototypen sind nicht biologisch abbaubar, weshalb auch in diesem Fall an der Entwicklung von Mikrofliegern gearbeitet, die sich nach ihrem Einsatz umweltfreundlich zersetzen. Die aktuelle Studie mit dem Titel ,Solar-powered shape-changing origami microfliers’ ist im Netz einsehbar.
Kontextbezogen ist auf eine Veröffentlichung vom November zu verweisen, in der eine andere Form der Zusammenarbeit zwischen Drohnen und künstlichen Samen beschrieben wird. Dabei geht es um Umweltsensoren, die nach dem Vorbild des Ahornsamens konstruiert sind und ebenfalls großflächig Umweltdaten auf der Erdoberfläche sammeln sollen.
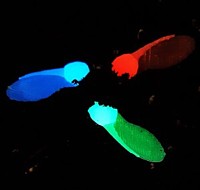
Samen
Der künstliche Samen ahmt das aerodynamische Verhalten des Feldahornsamens nach: Ist dieser reif, löst er sich von der Pflanze und wird vom Wind über große Flächen verteilt. Aufgrund seines einflügeligen, besonderes aerodynamischen Designs fällt er nicht gleich zu Boden, sondern rotiert beim Fallen. Diese Autorotation verringert die Sinkgeschwindigkeit und läßt ihn länger in der Luft bleiben, wodurch sich die Wahrscheinlichkeit einer großflächigen Ausbreitung erhöht.
Die von Forschern des Istituto Italiano di Tecnologia (IIT) in Genua und des Leibniz-Instituts für Neue Materialien gGmbH (INM) mit Sitz in Saarbrücken entwickelten künstlichen Samen basieren auf ungiftigen, temperaturempfindlichen und fluoreszierenden Lanthanoidpartikeln, die in ein biokompatibles und kompostierbares Material auf Basis von Polymilchsäure eingebettet sind. Hergestellt werden sie per 3D-Drucker.
Die Sensor-Samen, die von Drohnen ausgesetzt werden sollen, reagieren auf Temperatur, Luftfeuchtigkeit, CO2 oder Schadstoffwerte, indem sie fluoreszieren. Beispielsweise können sie anfangen, rotes Licht abzustrahlen, wenn die Bodentemperatur in die Nähe des Nullpunktes kommt. Die Signale der leuchtenden Partikel werden dann von den selben Drohnen mit Kameras und fLiDAR (fluorescence Light Detection and Ranging) eingefangen und dokumentiert.
Durch die Verlagerung der Sensorik in das Material selbst entfallen Stromversorgung und Elektronik, was diese Sensoren besonders umweltfreundlich macht. Die entsprechende Studie mit dem Titel ,A printed luminescent flier inspired by plant seeds for eco-friendly physical sensing’ ist im Netz vollständig einsehbar.
In Zusammenhang mit der Nachahmung von Ahornsamen ist zu ergänzen, daß bereits im Mai 2023 über eine Technologie berichtet wurde, die von einem Team aus rund 40 Studierenden der Julius-Maximilians-Universität Würzburg (JMU), die sich im Verein WüSpace e.V. organisiert haben, entwickelt worden ist. Die sogenannten SpaceSeeds sollen einmal Fallschirme bei Landekörpern aus dem Weltraum ersetzen, indem sie genau wie ihr natürliches Vorbild das Prinzip der Autorotation nutzen, um sanft zur Erde zu gleiten.

Die Arbeiten erfolgen im Rahmen des REXUS/BEXUS-Programms, das Raketen- (REXUS) und Ballonexperimente (BEXUS) von Studierenden fördert. An dem Zusammenschluß mehrerer europäischer Raumfahrtorganisationen sind neben dem Deutschen Zentrum für Luft- und Raumfahrt (DLR) auch die Schwedischen Nationalen Raumfahrtbehörde (SNSA) und die Europäische Weltraumorganisation (ESA) beteiligt.
Der WüSpace e.V. war aus dem ursprünglichen, im Sommer 2018 begonnen Projekt Daedalus 1 entstanden, bei dem insgesamt 24 Studenten der JMU und der TU Wien neue Landemechanismen für die Raumfahrt entwickelt haben. Das Projekt erreichte im März 2019 seinen Zenit, als zwei SpaceSeeds an Bord einer Rakete auf eine Höhe von 75 km gebracht und dort freigesetzt wurden, bevor sie am Ende sicher wieder auf der Erde landeten. Die Landekapseln besitzen vier ausfaltbare Blätter mit konventioneller Bauform.
Ende des Jahres wird das Team Daedalus 2 ausgewählt, um dem Beispiel des Vorgängerprojekts zu folgen und zwei weitere Prototypen in einem realistischen Szenario zu erproben. Die SpaceSeed v2 starten Anfang April 2023 an Bord einer REXUS-Rakete vom Esrange Space Center in Nordschweden, werden in 80 km Höhe ausgeworfen und sammeln während ihres kontrollierten Falls eine Vielzahl von Daten. Die aktive Regelung des Anstellwinkels stellt die wichtigste Weiterentwicklung im Vergleich zum ersten Projekt dar.
Hinweis: Unter dem Namen Projekt Daedalus sind verschiedene Arbeiten und Umsetzungen bekannt, die jedoch nichts mit der erwähnten Technologie des WüSpace e.V. zu tun haben, wie z.B. die in den 1970er durchgeführte Studie der British Interplanetary Society (BIS) mit dem Ziel eines interstellaren unbemannten Raumfahrzeugs; das zwischen 1986 und 1988 entworfene und gebaute Muskelkraft-Flugzeug des Massachusetts Institute of Technology (MIT), das sich hier in der entsprechenden Übersicht finden läßt; oder das energieautarke Robotik-Trackingsystem, das bis 2017 vom Deutschen Forschungszentrum für Künstliche Intelligenz GmbH und dem Fraunhofer-Institut für Integrierte Schaltungen (IIS) entwickelt wurde... um nur einige zu nennen.
Und unter dem Namen Space-Seeds 2.0 läuft während der Schuljahre 2018/2019 und 2022/2023 ein bundesweites Schul- und Jugendprojekt der DLR, bei dem Grundschüler der 3. und 4. Klasse mit Wildblumensamen experimentieren, die zeitweilig auf der Internationalen Raumstation ISS waren. Dies nur als Hinweis, um Namensverwechslungen zu vermeiden.
Im Februar 2023 präsentieren Forscher der Universität Tokio eine Anzahl von Flugroboter-Prototypen, die in der Lage sind, ihre strukturelle Form in der Luft zu verändern, was ihnen nie dagewesene Fähigkeiten verleiht. Einige davon wurden bereits in der Übersicht 2018 vorgestellt, denn so neu sind sie nicht.
Die Formwandler-Bots sind in Segmente unterteilt, und jedes Segment verfügt über einen eigenen Multikopter-Antrieb, der dank eines mehrachsigen Kardansystems den Schub in jede Richtung lenken kann. Die Segmente sind miteinander verbunden, können sich aber in verschiedene Richtungen bewegen. Das Konzept wurde durch fliegende Drachen und die Art und Weise inspiriert, wie diese mythischen Tiere ihre Körper in der Luft sanft wellenförmig bewegen.
Indem alle Antriebssysteme in Echtzeit koordiniert werden, selbst wenn die Struktur während des Flugs ihre Form verändert, lassen sich Roboter als fliegende menschliche Arme vorstellen, die in der Luft Manipulationen vornehmen können. Ein solche mehrsegmentige Drohne kann eine Lampe wechseln oder eine Tür öffnen - oder sich in eine Schlange verwandeln, um sehr enge Räume zu erkunden.
In einem Video ist der Roboter Dragon zu sehen, an dem das Team schon seit einigen Jahren arbeitet, und der inzwischen Aufgaben wie das Schieben und Ziehen von Objekten bewältigt und sich um sich selbst dreht, um einen fliegenden Greifring zu schaffen, der in der Lage ist, Objekte mit einem Gewicht von bis zu 1 kg zu greifen, auszubalancieren, zu bewegen und wieder loszulassen. Ein anderes Video zeigt, wie der Dragon mit stiftähnlichen Aufsätzen große Ventile öffnet und schließt.
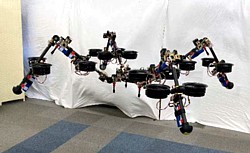
Jetzt stellt das Team eine weitere Version namens SPIDAR vor (SPherIcally vectorable and Distributed rotors assisted Air-ground amphibious quadruped Robot), einen 15 kg schweren vierfüßigen Roboter, der mit seiner Kombination aus Beinen und Propellern sowohl gehen als auch fliegen kann. Um die Bewegung zu unterstützen, besitzt er schwach motorisierte Gelenke an der Hüfte und am Knie jedes Beins.
Das Ergebnis ist ein extrem langsamer und lauter Spinnenroboter, der in diesem Stadium schwach und wackelig aussieht, doch mit etwas mehr Entwicklungsarbeit soll daraus ein fliegender Vier-Punkt-Greifer werden, der zwei Objekte gleichzeitig halten und manipulieren kann, z.B. den Deckel eines Glases abnehmen oder eine Schachtel halten, während er etwas aufhebt und hineinlegt.
Im Juli folgen Berichte über die Firma Revolute Robotics, die ebenfalls einen Hightech-Roboter entwickelt und gebaut hat, der sowohl rollen als auch fliegen kann. Der Hybrid Mobility Robot (HMR) rollt dank seinem kugelförmigem Exoskelett durchs Gelände, auch unwegsames. Ist das Hindernis allerdings zu hoch oder der Anstieg zu steil, beginnt er zu fliegen, desgleichen wenn z.B. Menschen sich ihm in den Weg stellen.

Das von zwei Absolventen der University of Arizona im Jahr 2021 gegründete Unternehmen hatte im Oktober des Vorjahres mit Finanzierung der Universität den ersten Prototypen bauen und das erste Patent einreichen können. Dem folgen diverse Preise und Auszeichnungen sowie im Juni 2023 eine Finanzierung durch die U.S. Army, was möglicherweise der Grund für das aktuelle Erscheinen in der Presse ist.
Das leichte kugelförmige Exoskelett des HMR kann sich bis zu einem gewissen Grad verformen. So wirkt es wie ein Stoßdämpfer und trägt dazu bei, die Elektronik im Inneren des Käfigs nahezu erschütterungsfrei zu halten, wenn er über holprigen Untergrund rollt. Die Gitterkugel schützt auch die vier Rotoren im Inneren, die den HMR über Hindernisse tragen. Dieser bewegt sich in der Regel autonom, wobei er den Roll- dem Flugmodus stets vorzieht, weil er fünfmal so viel Energie verbraucht, wenn er sich in die Luft erhebt.
Die Drohne ist vor allem für Inspektionen und natürlich Such- und Rettungseinsätze gedacht, wozu sie mit Kameras oder anderen Sensoren ausgestattet wird. Der HMR soll aber auch das Militär als Aufklärer unterstützen. Dazu sollen gleich mehrere Geräte eingesetzt werden, die zusammenarbeiten, um ein Ziel aus mehreren Perspektiven darzustellen.
Der HMR ähnelt im übrigen sehr der GimBall-Drohne der Technischen Hochschule Lausanne (EPFL), die dann von der Ausgründung Flyability weiterentwickelt und bereits vor vielen Jahren kommerzialisiert wurde. Sie wird ausführlich in der Jahresübersicht 2015 präsentiert (s.d.).
Weiter mit der allgemeinen Chronologie: Im März 2023 wird
der Firma Ford Motor Co. das Patent für
ein System erteilt, das Elektromobil-Fahrer, die mit leeren Batterien
gestrandet sind, mittels Drohnen rettet, die ihnen Starthilfe geben
(US-Nr. 11.614.063, angemeldet 2017). Das Patent beschreibt
eine Reihe von Szenarien, in denen die Fahrer einen Hilferuf absetzen
und darauf warten, daß Drohnen sich auf den Weg machen, um mit ihren
eigenen Batterien das liegengebliebene Auto aufzuladen.
Im Juni folgt die Veröffentlichung einer Patentanmeldung, die eine Schiebedach-Zusatzplatte für Fahrzeuge beschreibt, die es Fahrern erlauben würde, ihre Drohnen vom Dach eines mit einem Schiebedach ausgestatteten Autos oder Lastwagens zu starten und zu landen, während sie entweder parken oder unterwegs sind (US-Nr. 20230174233, beantragt 2021).

VTOL
Im April 2023 stellt die Firma Hood Tech (Hood Tech Corp. Mechanical Inc.) aus Hood River in Oregon auf der Sea-Air-Space Exhibition in National Harbor, Maryland, ein unbemanntes Fluggerät namens Integrator VTOL vor, das vertikal auf Schiffen oder an Land startet, um Starrflügler-Drohnen auf eine vorgegebene Flughöhe zu bringen, von der aus sie losfliegen, ohne daß ihre Nutzlastkapazität oder Ausdauer durch einen energieaufwendigen Bodenstart beeinträchtigt werden.
Das System besteht aus zwei Teilen, dem von Hood Tech entwickelten Flying Launch and Recovery System (FLARES) sowie einem Luftfahrzeug der Boeing-Tochter Insitu Pacific, die mit ihrer ScanEagle Drohne bereits in der Jahresübersicht 2015 vorgestellt wurde. FLARES ist eine Multikopter-Drohne mit vier Doppelpropellern, die an der Unterseite einen Mechanismus besitzt, an dem eine Starrflügler-Drohne eines Drittanbieters angekoppelt wird.
Obwohl das System in einer Vielzahl von Szenarien eingesetzt werden kann, ist es hauptsächlich für den Einsatz auf Schiffsdecks konzipiert, wo es auch bei rauher See funktioniert. Es lassen sich aber keine spezifischen Details zum Antrieb des Integrators finden - die Flugdauer von mehr als 16 Stunden mit einer Nutzlast von 18 kg läßt jedoch auf einen Brennstoff-Antrieb schließen, weshalb das System hier nicht weiter verfolgt werden soll - zumindest solange keine gegensätzlichen Informationen bekannt werden.
Ebenfalls im April präsentieren Forscher der Arizona State University (ASU) um Prof. Wenlong Zhang die erste Quadro-Drohne ihrer Art, die sowohl über einen aufblasbaren Rahmen verfügt, um Kollisionen unbeschadet zu überstehen, als auch über einen Greifer, der es dem Gerät ermöglicht, sich auf fast jede Oberfläche setzen zu können. Der Artikel trägt den Titel ,A Soft-Bodied Aerial Robot for Collision Resilience and Contact-Reactive Perching’.

An dem Soft-Bodied Aerial Robot (SoBar) ist alles außer der Technik aufblasbar, wobei der Rahmen aus hochfestem, polyurethanbeschichtetem Nylongewebe besteht und nicht einmal ein Zehntel dessen wiegt, was ein reguläres starres Drohnengerüst auf die Waage bringt. Im aufgeblasenen Zustand ragen die Arme über die Propeller hinaus und schützen sie so vor dem direkten Kontakt mit Hindernissen. Egal, wogegen die Drohne stößt, sie prallt locker davon ab und bleibt heil. Zudem ist sie damit schwimmfähig.
Um gleichermaßen auf vertikalen und horizontalen Flächen landen und sich festhalten zu können, und dann unbegrenzt an Ort und Stelle zu verharren, die Propeller auszuschalten und keinen Strom für einen Schwebeflug zu verbrauchen, besitzt die Drohne unten einen Greifer aus Stahlblattfedern, die sich in einer aufblasbaren Nylonhülle verstecken.
Preßt sich der Greifer gegen ein festes Objekt, springen die vorher flachen Federn auf und umklammern den Gegenstand, was ungefähr drei Millisekunden dauert. Da die Federn mechanisch stabil sind, benötigen sie ebenfalls keine Energie. Um sich wieder zu lösen, bläst ein Aktuator die Greifhülsen in weniger als drei Sekunden auf, so daß sie sich schließlich versteifen und die Federn wieder aufklappen.
Zur Erinnerung: Ein aufblasbarer Hexakopter wurde bereits 2017 von dem französischem Start-Up Airvada vorgestellt - nachdem in China schon drei Jahre zuvor eine aufblasbare Starrflügler-Drohne gezeigt wurde. Und auch diverse Greif- und Sitzmechanismen sind in früheren Übersichten dokumentiert worden, obwohl daraus bislang noch keine kommerziellen Produkte entstanden sind, wie es scheint. Als Beispiel sei der von Prof. Mirko Kovac entwickelte Sitzmechanismus genannt, der neben anderen in der Jahresübersicht 2010 beschrieben wird.
Im Mai 2023 berichten die Fachblogs über die Schweizer Firma Elythor SA, ein neu gegründetes Spin-Off der Eidgenössischen Technischen Hochschule Lausanne (EPFL), das eine spezielle VTOL- Inspektionsdrohne entwickelt hat, die im Vergleich zu konventionellen Fluggeräten um bis zu 85 % weniger Strom benötigt. Geflügelte Drohnen haben den Vorteil längerer Flugzeiten, während Quadrokopter eine bessere Manövrierfähigkeit haben - weshalb die Ingenieure des Unternehmens beides kombiniert und ein adaptives Flügelsystem hinzugefügt haben, das den Energiebedarf der Drohne noch weiter reduziert.
Die Gestaltwandler-Drohne namens Morpho hat einen aerodynamischen, kugelförmigen Körper mit vier Propellerarmen im Quadrokopter-Stil - sowie vier Flügel, die sich jeweils unabhängig vom Hauptkörper schwenken lassen. Vor dem Start steht sie in vertikaler Ausrichtung auf ihren vier Flügeln, die zu diesem Zweck nach unten weisen. Die Rotoren hieven die 2,5 kg schwere Drohne dann senkrecht in die Luft, woraufhin sich die Flügelform in Echtzeit an die jeweilige Aufgabe anpaßt.
Um in den Vorwärtsflug mit festen Flügeln überzugehen, kippt die Drohne in eine horizontale Ausrichtung und bringt ihre Flügel in eine doppeldeckerähnliche Konfiguration. Bewegt sie sich in die Richtung, in die der Wind weht, stellt sie ihre Flügel so ein, daß sie wie Segel den Wind einfangen, anstatt die Batterie zu verwenden, um Schubkraft zu erzeugen. Ansonsten fliegt die Drohne mit angelegten Flügeln.
Am Einsatzort angekommen, spreizen sich die Flügel, so daß Morpho bewegungslos in der Luft stehen oder langsam über die zu inspizierende Oberfläche fliegen kann. Dann verwandelt sich die Drohne wieder zurück, um schnell zum nächsten Einsatzort zu kommen, wo sich das Flügelspiel wiederholt. Das Flügelsteuerungssystem ist das Ergebnis mehrjähriger Forschung an der EPFL und umfaßt Sensoren, die mit einer Software zur Überwachung von Windrichtung und -geschwindigkeit verbunden sind.
Die von im Vorjahr gegründete Firma will in den kommenden Monaten die industrielle Produktion des Morpho vorbereiten, der bislang nur als funktionaler Prototyp mit den Maßen 63 x 120 x 16,2 cm (gefaltet) bzw. 150 x 120 x 16,2 cm (aufgefaltet) existiert. Die Markteinführung ist noch für Ende dieses Jahres geplant. Bislang läßt sich dies aber nicht bestätigen.
Da der Lärm von Fluggeräten noch immer beträchtlich ist, entwickelt ein anderes Team der o.e. Eidgenössischen Technischen Hochschule Lausanne (EPFL) eine Methode der plasmabasierten Geräuschunterdrückung, die Flugzeuge, aber auch Autos und Räume zum Schweigen bringen kann, wie im Mai 2023 berichtet wird. Das ultradünne aktive System, das zu 100 % wirksam sein soll, verwendet anstelle üblicher Lautsprecher mit Membranen zur Erzeugung von Schallwellen - d.h. Druckwellen in der Luft - einen Plasmaantrieb für ionisierte Luft.
Lautsprecher
Bei der aktiven Geräuschunterdrückung (Active noise cancellation, ANC) werden die Druckwellen mit einem Mikrofon gemessen, dann genau dieselben Druckwellen in umgekehrter Richtung erzeugt und über einen Lautsprecher wiedergegeben. Den positiven Druckspitzen wird Druck entzogen und den negativen Drucktälern wird Druck hinzugefügt, wobei die neue Welle die alte Welle mehr oder weniger auslöscht. ANC funktioniert gut in Kopfhörern und Autos, aber tieffrequente, langwellige Bässe auszulöschen erfordert eine Wand voller Lautsprecher.
Das EPFL-Team testet daher die schalldämpfenden Eigenschaften von plasmabasierten ionischen Lautsprechern, die dünn, leicht, einfach und billig zu bauen sind. Solcherart Lautsprecher funktionieren wie ionische Antriebssysteme, die ein elektrisches Feld nutzen, um die Umgebungsluft in ein Plasma zu ionisieren, wodurch positiv und negativ geladene Teilchen entstehen. Diese Ionen werden dann magnetisch beschleunigt und stoßen gegen die Umgebungsluft, um Druckwellen zu erzeugen.
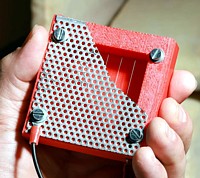
Im Oktober 2020 war dann ein Video veröffentlicht worden, das einen plasmabasierten Lautsprecher aus dem Jahr 2012 zeigt, der aus perforierten Metallplatten mit Drahtschleifen in kurzem Abstand dahinter besteht. Diese reagieren hervorragend auf Spannungsänderungen, da hier keine relativ schweren Lautsprechermembranen bewegt werden müssen.
Im Gegensatz dazu: So leicht wie Luft ist die Luft selbst. Daher wird zunächst die dünne Luftschicht zwischen den Elektroden ionisiert, die als plasmaakustische Metallschicht bezeichnet wird. Dieselben Luftteilchen, die nun elektrisch geladen sind, können sofort auf externe elektrische Feldbefehle reagieren und effektiv mit den Schallschwingungen in der Luft um das Gerät herum interagieren, um sie auszulöschen. Es zeigt sich, daß eine nur 17 mm dicke Schicht Geräusche mit einer Frequenz von 20 Hz genauso gut blockieren kann wie eine 4 m dicke Wand, denn „hundert Prozent der eintreffenden Schallintensität werden von der Metallschicht absorbiert und nichts wird zurück reflektiert.“
Die EPFL hat die plasmabasierte Technologie bereits an das Schweizer Unternehmen Sonexos lizenziert, das sie für eine breite Palette von Anwendungen vermarkten will, darunter auch Fahrzeug- und Flugzeugkabinen. Die Studie mit dem Titel ,Ultrabroadband sound control with deep-subwavelength plasmacoustic metalayers’ ist im Netz einsehbar.
Hinweis: Das Thema Ionenantriebe zum irdischen Fliegen wird in der Jahresübersicht 2018 behandelt, Anwendungen im All im Kapitelteil Alternative Antriebe in der Raumfahrt.
Im August 2023 berichtet die Presse, daß in Russland Schüler
zwischen 15 und 17 Jahren ab dem im September beginnenden neuen Schuljahr
die Steuerung von Drohnen lernen werden. In dem Fach Drohnenkunde wird
unterrichtet, die Drohnen selbst zu steuern, wie Drohnen militärisch
eingesetzt werden und wie gegnerische Drohnen abzuwehren sind. Der
Kurs gehört zum wiedereingeführten Militärunterricht des Landes.
Ebenfalls im August veröffentlichen Wissenschaftler der Yunnan
University und der Chinesischen Akademie der Wissenschaften eine
Studie, in welcher sie über ihre Arbeit mit dem sogenannten Edge
Computing berichten, das Drohnen zur Früherkennung von Bränden,
Verkehrszählung oder Auffindung von Verletzten nach Naturkatastrophen
künftig noch zuverlässiger machen wird.
Mit Edge Computing werden Daten wie Flughöhe, Geschwindigkeit und andere Parameter optimiert und gleichzeitig sichergestellt, daß die Fähigkeit, gesuchte Objekte sicher zu erkennen, auf dem höchsten Stand ist, Dabei werden die Daten nicht erst zur zentralen Verarbeitung auf einem Server weitergeleitet, sondern an Ort und Stelle verarbeitet. Die Studien trägt den Titel ,E3-UAV: An Edge-Based Energy-Efficient Object Detection System for Unmanned Aerial Vehicles’.
Im September 2023 veröffentlicht ein Team der brasilianischen Universidade Federal de Uberlândia und der Universidade Federal de Goiás eine Studie mit dem Titel ,AirQuality Lab-on-a-Drone: A Low-Cost 3D-Printed Analytical IoT Platform for Vertical Monitoring of Gaseous H2S’, in welcher sie ein Mini-Labor zur Analyse von Schadstoffen beschreiben, das sie speziell für den Einsatz an Bord von Drohnen entwickelt haben. Diese werden dann in Regionen geschickt, die im Verdacht stehen, die Umwelt zu belasten.

(Montage)
Das fliegende Labor nimmt Luftproben und ermittelt noch während des Fluges die darin enthaltenen Schadstoffe, was bisher erst nach Rückkehr der Drohne im Labor geschah. Die Daten werden in Echtzeit an ein Smartphone übermittelt, die neue Methode spart Zeit und die Lokalisierung von Emittenten vereinfacht sich.
Das 3D-gedruckte Gerät, das derzeit für den Nachweis von Schwefelwasserstoffgas ausgelegt ist, nutzt eine chemische Reaktion, bei der der grün leuchtende Farbstoff Fluorescein-Quecksilberacetat weniger hell leuchtet, wenn er dem Gas ausgesetzt ist. Eine blaue LED verstärkt diese Reaktion, so daß ein integrierter Lichtsensor die Abnahme der Fluoreszenzintensität und damit die Konzentration des Gases in der Umgebung präzise messen kann. Bisher werden Schadstoffe meist von Sensoren in Bodennähe gemessen, womit sich zwar die Existenz, nicht jedoch die Herkunft ermitteln läßt.
Das neue Flug-Labor wiegt nur 300 g und kostet etwa 50 $ in der Herstellung. Als nächstes wollen die brasilianischen Wissenschaftler weitere Labore entwickeln, die andere Schadstoffe detektieren und messen können.
Anfang Oktober 2023 stellen Wissenschaftler der Universität Tokio und der japanischen NTT Corp. ein System namens Millisign vor, das autonomen Drohnen dabei helfen soll, Landeplätze sicher zu lokalisieren - auch wenn es dunkel, regnerisch oder neblig ist und es keinen Strom für die Beleuchtung am Boden gibt. Das kostengünstige System setzt hierzu große Versionen der RFID-Etiketten (Radio Frequency Identification) ein, wie sie auf einer Vielzahl von Produkten verwendet werden.

In einem typischen RFID-System wird das batterielose Etikett vorübergehend durch ein von einem RFID-Handlesegerät ausgesandtes Funksignal mit Strom versorgt. Das Etikett sendet dann über eine integrierte Antenne eine modifizierte Version des Signals an das Lesegerät zurück, das Informationen wie die Art des Produkts, das Herstellungsdatum oder Ähnliches enthält.
Bei Millisign übernimmt ein kleines, an der Drohne montiertes Millimeterwellen-Radargerät den Platz des Handlesegeräts. Wenn eines der großen, auf dem Landeplatz befestigten Etiketten ein Funksignal von diesem Gerät empfängt, sendet es ein Antwortsignal an die Drohne zurück. Diese Antwort gibt die Position des Tags/Pads in Bezug auf die Drohne an - je stärker das empfangene Signal ist, desto näher ist die Drohne an ihrem Ziel.
Wesentlich ist, daß die Millisign-Etiketten mit Eckreflektoren ausgestattet sind, die es ihnen ermöglichen, Signale über einen großen dreidimensionalen Winkel zu senden und zu empfangen. In der aktuellen Version des Systems kann ein 292 x 600 mm großer Tag von einer Drohne aus der Luft aus einer Entfernung von 10 - 15 m gelesen werden - im Gegensatz zu herkömmlichen RFID-Etiketten mit flachen Antennen und viel geringerer Reichweite. Die im Netz einsehbar Meldung der NTT trägt den Titel ,World’s first millimeter-wave RFID tag to improve drone navigation accuracy’.

Ebenfalls im Oktober berichten die Blogs über die aktuell größte Quadrokopter-Drohne der Welt, die von Studenten der University of Manchester gebaut wurde. Die Idee zu dem Projekt entstand, um den Teilnehmern die Möglichkeit zu geben, mit Materialien zu experimentieren, die kostengünstige Leichtbauweise ermöglichen und dabei umweltfreundlicher sind als die für gewöhnlich verwendete Glasfasern.
Das Ungetüm mit einem Durchmesser von 6,4 m und darf sogar legal fliegen, da in Großbritannien Drohnen ohne besondere Auflagen in die Luft dürfen, wenn ihr Gewicht bis 25 kg beträgt. Indem die Studenten ein etwa 5 mm dickes Schaummaterial in einem hohlen Design verwenden, das aus einem Schaumkern und einer Außenhaut aus Papier besteht, per Laser geschnitten und dann mittels eines Heißklebeverfahrens miteinander verklebt wird, gelingt es das Gewicht der Drohne auf 24,5 kg zu halten.
Einen wirklichen Einsatzzweck hat der Giant Foamboard Quadcopter (GFQ) allerdings nicht – es handelt sich eher um eine Art Machbarkeitsstudie, deren Erstflug bereits im Juli im Haupthangar des Snowdonia Aerospace Centre stattfand. Es gibt zwar Drohnen und Prototypen, die wesentlich größer sind, diese sind aber nicht im Quadrokopter-Design gebaut und verwenden wesentlich mehr Rotoren, wie z.B. die solaren Stratosphärendrohnen.

von Galffy
Im Dezember 2023 wird über eine Methode der aktiven Turbulenzunterdrückung berichtet, die Andras Galffy im Zuge seiner Dissertation an der Technischen Universität Wien entwickelt hat. Da Turbulenzen durch Auf- und Abwinde in der Luft entstehen, passen sich die intelligenten Flügel diesen an und unterdrücken dadurch die Turbulenzen. Die von den Fluggästen empfundenen Kräfte werden so um bis zu 80 % reduziert - und der Treibstoffverbrauch um bis zu 10 %.
Das österreichische Unternehmen Turbulence Solutions hat das System, das Turbulenzen mittels weit vorne angebrachten Differenzdrucksonden erkennt, kurz bevor sie auftreten, und dann eine superschnelle automatische Auftriebsanpassung durch die Steuerflächen des Flugzeugs nutzt, um Kräfte zu erzeugen, die den Turbulenzen entgegenwirken, bereits in der Flugerprobung.
Laut einer Veröffentlichung vom April 2021 konnte das System bereits bei seinem ersten Testflug vertikale Beschleunigungen von mehr als 30 m/sec mit einer Genauigkeit von fast 62 % vorhersagen. Für 2026 ist nun eine Version für eVTOL-Lufttaxis geplant, und bis 2030 soll auch ein System für kommerzielle Flugzeuge zur Verfügung stehen.

TF-G1
Ebenfalls im Dezember 2023 zeigen die Blogs eine aus
Tschechien stammende elektrische Autogyro-Drohne namens ThunderFly
TF-G1, die vor allem für Anwendungen wie Wetterforschung und
Such- und Rettungseinsätze bei stürmischem Wetter entwickelt wurde.
Autogyros (o. Tragschrauber, Gyrocopter) besitzen einem angetriebenen
Propeller, der sie vorwärts schiebt oder zieht, und einen nicht angetriebenen
Satz von Rotorblättern an der Spitze. Wenn der Propeller das Flugzeug
horizontal bewegt, strömt Luft durch die Rotorblätter, wodurch diese
sich drehen und Auftrieb erzeugen.
Die Drohne hat ein maximales Startgewicht von 25 kg und kann bis zu 5 kg an Ausrüstung wie meteorologische Sensoren und Wärmebildkameras tragen. Sie kann vom Dach eines fahrenden Autos aus gestartet werden und pro Ladung des Lithium-Akkus mehr als eine Stunde lang fliegen. In einem Video ist ein kleineres Geschwistermodell TF-G2 zu sehen, das einen 3D-gedruckten und quelloffenen Körper besitzt, der von den Nutzern nach Bedarf angepaßt werden kann.
Über das Unternehmen ThunderFly s.r.o. aus Soběslav, das mindestens seit 2019 besteht, ist sonst aber nicht viel zu erfahren. Auch von konkreten Einsätzen ist bislang nichts bekannt.
Weiter mit den Elektro- und Solarfluggeräten...