Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2010
Im Januar gibt das Hydrogenius-Team (s.o.) bekannt, daß es zur Teilnahme
an der NASA/CAFE Green Prize Challenge nun parallel an der Entwicklung
eines speziellen Wettbewerbsflugzeugs namens e-Genius arbeit,
das sich von seinem Bruder Hydrogenius insbesondere
durch den Energiespeicher unterscheidet.

(Grafik)
Doch auch der Rumpf des e-Genius ist eine komplette Neuentwicklung und für elektrisches Fliegen optimiert. Im März 2010 ist der Polystyrol-Kern fertig und im Mai wird bereits am Rumpfurmodell gearbeitet. Die maximale Abflugmasse beträgt 850 kg, und Reichweite des Fliegers soll über 300 km betragen.
Anfang 2010 testet die Bundeswehr die Drohne AirRobot
AR 100-B im australischen Outback, wobei ihre Wüstentauglichkeit,
besonders im Hinblick auf die aktuellen Einsatzgebiete der Bundeswehr,
festgestellt wird. Unter dem Projekttitel ,Mikado’ (Mikroaufklärungsdrohne
für den Ortsbereich) hat das Heer bereits 60 Stück dieser Mini-Hubschrauber
beschafft, die von der AirRobot GmbH & Co. KG in
Arnsberg stammen.
Die Mini-UAV Fluggeräte mit bürsten- und getriebelosen Elektroantrieben haben einen Durchmesser von knapp 1 m, wiegen weniger als 1 kg und können eine Nutzlast von bis zu 200 g tragen. Sie sind mit einem 14,8 V / 2A LiPo-Akku ausgestattet. Durch ihre vier Rotoren können sie senkrecht starten und landen und haben die Fähigkeit, sich auch durch komplizierte Situationen zu manövrieren. Die Flugzeit beträgt 20 - 30 min, bei fehlender Funkverbindung oder niedriger Energie erfolgt eine autonome Landung.

AR 100-B
Im Gegensatz zu den bereits auf dem Spielzeugmarkt erhältlichen und entsprechend günstigen Modellen kostet die autonom fliegende Videosonde AR100-BL stolze 7.500 €, während die AR103 AR Basisstation (Standard) mit Videobrille, 4-fach Diversity Empfänger, Rucksack, Minnistativ, Funkleitsystem, Akku und Ladeadapter 6.544 € kostet.
Die Profiversion mit zusätzlichem TFT Bildschirm und digitaler Aufzeichnung schlägt mit 8.569 € zu Buche (Endkunden-Preisliste, Netto, 2005). Im zivilen Bereich nutzt die Unternehmensgruppe maier+roider einen ferngesteuerten und kamerabestückten AirRobot für die Erstellung von Luftbildaufnahmen (Projekt Heligraph).
Auch in Südkorea sollen UAVs entwickelt werden, wie Anfang 2010 in
einer Vereinbarung zwischen der Aerospace University und
dem Institute of Science and Technology festgelegt wird.
Das unbemannte und solarbetriebene Luftfahrzeug soll mehrere Monate lang
in einer Höhe von 20.000 m fliegen können. Das UAV wird eine Spannweite
von 40 m haben, auf deren Flügelfläche die Solarzellen angebracht sind,
welche den elektrischen betriebenen Propeller versorgen. Für die Nachtzeit
wird zusätzlich Strom in einem Li-Ionen-Akku gespeichert. Ein erster,
verkleinerter Prototyp mit einer Spannweite von nur 4 m soll ab 2012 im
Rahmen eines Pilotprojekts starten.

Solar Impulse
Vom 18. – 21. Januar 2010 findet in Abu
Dhabi das 3. World Future Energy Summit (WFES) statt – bei dem Bertrand
Piccard sein Solarflugzeug Solar Impulse präsentieren
darf.
Zu dieser Zeit führt das Institut für Aeroelastik des Deutschen Zentrums für Luft- und Raumfahrt (DLR) am kleineren Prototypen HB-SIA in Zürich die abschließenden Standschwingungsversuche (Ground Vibration Tests GVT) durch, und bereits im April 2010 besteht das Solarflugzeug erfolgreich seinen 87 min. dauernden Jungfernflug vom Flughafen Payerne aus, bei dem es eine Höhe von 1.200 m erreicht. Als Pilot fungiert der Deutsche Markus Scherdel.
Besonders erfreut ist das Team darüber, daß das Flugzeug bereits nach 200 m mit gerade einmal 38 km/h Bodengeschwindigkeit abhebt. Bei dem ersten Versuch im Dezember 2009 war das Flugzeug testweise 350 m weit und nur 1 m über dem Boden geflogen.
Noch vor dem Sommer soll das nächste Etappenziel, der anvisierte Nachtflug, realisiert werden. Bis dahin sind fünf bis sechs weitere Testflüge geplant, bei denen eine Flughöhe von 8.500 m – 9.000 m erreicht werden soll – mit ausschließlich aus der Sonne gewonnener Energie.

(Grafik)
Viel Presse bekommt auch ein Elektroflugzeug-Konzept der NASA,
das Mitte Januar 2010 auf dem Treffen der American Helicopter
Society in San Francisco erstmals öffentlich vorgestellt wird. Das bislang
nur im Flugsimulator existierende Senkrechtstarter-Flugzeug NASA
Puffin ist für eine Person gedacht und soll nicht mehr kosten
als ein normales Auto.
Angetrieben wird das ultraleise Einmann-Flugzeug durch 2 Elektromotoren, mit denen eine maximale Flughöhe von 9.150 m und eine Höchstgeschwindigkeit von rund 480 km/h erreichbar seien. Als normale Fluggeschwindigkeit werden 240 km/h angegeben. Die Reichweite mit einer Batterieladung beträgt 80 km, wobei die NASA-Ingenieure von einer Verdreifachung dieser Reichweite bis 2017 ausgehen.

(Grafik)
Die Rotoren haben fast 2,3 m Durchmesser und die Spannweite des 3,7 m langen Flugzeugs beträgt 4,4 m. Durch seine Kohlefaser-Komposit-Konstruktion wiegt der Elektroflieger weniger als 180 kg – einschließlich der 45 kg Lithium-Phosphat-Batterien. Der Puffin (= Papageientaucher) besitzt zudem – einem Hubschrauber ähnlich – die Fähigkeit, senkrecht in der Luft zu stehen. Als VTOL (vertical takeoff and landing) Vehikel werden weder Start- noch Landebahn benötigt.
Ein Demonstrationsmodell mit einem Drittel der Größe soll bereits im März gezeigt werden, der erste Prototyp dann im Juni 2010 fliegen. Tatsächlich ist danach aber nie wieder von dem Entwurf zu hören.
Ein zweites NASA-Konzept wird unter dem Namen Samarai (o. Dos Samara) bekannt, welcher sich auf Ahornsamen bezieht, denen die Einblatt-Propeller des Fluggefährts ähneln.
Das Flugzeug kombiniert ein leichtgewichtiges elektrisches System zum senkrechten Starten und Landen mit einem Verbrennungsmotor zum Vortrieb, wobei die sechs Propeller im Vorwärtsflug gestoppt werden und als Flügel wirken.

(Grafik)
Im Januar 2010 werden noch zwei weitere interessante
Designs vorgestellt. Bei dem ultraleichten und leisen Mosquito
Helicopter für eine Person wird die inzwischen zunehmend umgesetzte
Antriebstechnik mit vier elektrischen Propeller-Motoren angewandt, die
rechnergesteuert für die Stabilität des Flugobjekts sorgen.
Allerdings handelt es sich bei dem Design von Cikaric Dragan um ein für die US-Army entwickeltes Konzept, mit dem Soldaten in unwegsame Terrains wie Täler, Wälder und sogar Höhlen vordringen sollen. Der Strom soll von hochmodernen, auf Nanoröhren-Technologie basierenden Supercaps geliefert werden. Hohe Fluggeschwindigkeiten können allerdings nicht erreicht werden.

(Grafik)
Ein beträchtlich größerer und ebenfalls elektrisch angetriebener Hubschrauber aus der Modellwerkstatt desselben Industriedesigners trägt den Namen Air Alien Green Helicopter.
Das Konzept verbindet einen großen Elektromotor und einen Stator mit zwei großen elektromagnetischen Ringen. Der erforderliche Strom wird mittels einer Brennstoffzelle erzeugt, deren große, mit Wasserstoff und Sauerstoff gefüllte Tanks unter dem Boden angebracht sind.
Die zwei Propeller drehen sich in entgegengesetzten Richtungen und stabilisieren dadurch den Flugkörper, der für mehrere Personen ausgelegt ist. Über Umsetzungen der hoch interessanten Konzepte ist bislang aber nichts bekannt.
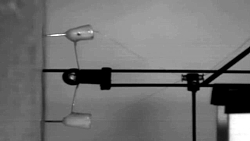
Einen ganz besonderen Flieger präsentiert im Januar 2010 die Stanford
University – denn er kann auf ausreichend rauhen senkrechten Flächen
wie Ziegelwänden landen und anschließend von dort auch wieder starten.
Das Team um Alexis Lussier Desbiens und Mark
R. Cutkosky, auf den schon die Entwicklung diverser krabbelnder,
kletternder und springender Roboter zurückgeht, nutzt hierfür die ebenfalls
von Cutkosky erfundenen Mikro-Stacheln (microspines), welche die Hafttechnik
der Gecko-Füße imitieren.

Die kleine Starrflügel-Drohne nähert sich der Wand mit einer Geschwindigkeit von bis zu 35 km/h, reduziert diese – ausgelöst durch einen Näherungssensor – scharf auf etwa 11 km/h, während ihr Körper nach oben kippt, so daß sie mit den Füßen zuerst aufkommt und sich an der Oberfläche festklammern kann. Beim Aufsetzen absorbiert eine Federung die verbleibende kinetische Energie, um Spitzenkräfte zu minimieren und einen Aufprall zu vermeiden. Die gesamte Manövrierdauer beträgt weniger als eine Sekunde.
Im Gegensatz zu den herkömmlichen UAVs könnte mittels dieser Technik beispielsweise ein ganzer Schwarm dieser kleinen Luftfahrzeuge leise in eine Stadt fliegen und zwischen den Gebäuden manövrieren. Sie kommunizieren miteinander, während sie nicht auf Straßen oder flachen Dächern, sondern an den Seiten der Gebäude und unter den Traufen nach Plätzen suchen, wo sie sich wie Fledermäuse oder Insekten in Sicherheit und Dunkelheit verstecken.
Die Flieger können dort festklammert dann Stunden oder Tage verbringen, wobei sie wenig Energie verbrauchen und keine Geräusche verursachen, während sie das Gebiet überwachen. Sind sie damit fertig, starten sie, indem sie sich einfach fallen lassen, und sind prompt wieder in der Luft, bereit für ihre nächste Mission.
Spätere Meldungen vom März 2013 belegen, daß das Team zwischenzeitlich eine Reihe weiterer dynamischer Mechanismen entwickelt hat, damit auch Quadrokopter auf rauhen und sogar glatten Oberflächen landen und sich dort festhalten können (Dynamic Rotorcraft Perching Mechanisms). Um auf Glas oder Acryl haften zu können, wird ein ebenfalls Gecko-inspirierter trockener Klebstoff verwendet.
Nur wenige Monate später, im Juni 2010, stellt Prof. Mirko
Kovac von der École Polytechnique Fédérale
de Lausanne (EPFL)
einen von Insekten inspirierten Sitzmechanismus vor,
der es Mikro-Luftfahrzeugen erlaubt, sich auf vertikale Oberflächen zu
setzen. Konkret gesagt, nagelt sich das Fluggerät fest. Herzstück des
Mechanismus sind nämlich zwei scharfen Zinken, die an Armen an der Vorderseite
des Mikroseglers angebracht sind.
Wenn die Nase des Flugzeugs auf eine vertikale Fläche trifft, schnappen die Arme nach vorne und stecken die Zacken in diese Fläche. Diese durchdringen problemlos Holz, sind aber auch auf Beton sehr effektiv. Das Flugzeug wird bei dem Aufprall nicht beschädigt, was zum Teil auf die trägheitsverteilende Wirkung des Vorwärtsstoßes der Arme zurückzuführen ist. Es kann dann unbegrenzt und ohne Energieaufwand an der Oberfläche hängen bleiben.
Wird es Zeit, zu einem anderen Ort weiterzufliegen, zieht ein winziger ferngesteuerter Motor die Arme zurück und läßt das MAV frei. Im Prinzip kann das nur 4,6 g schwere Modul an so gut wie jedem UAV angewandt werden.
Mit dieser Entwicklung könnten Schwärme von winzigen Robotergleitern beispielsweise über Katastrophengebieten wie Waldbränden oder Erdbeben eingesetzt werden. Dabei würden die Gleiter direkt zu den Seiten von Aussichtspunkten wie hohen Gebäuden oder Bäumen fliegen, sich auf deren Oberflächen niederlassen und über Kameras oder andere Sensoren Daten übermitteln.
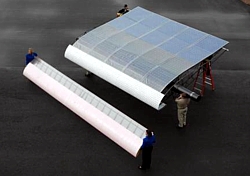
Bereits im März 2010 stellt Aurora Flight Sciences ein
neues Flügel-Design vor, das schon erfolgreich die ersten Tests besteht.
Der Testflügel hat eine Spannweite von 6,7 m und eine Tiefe von 4,5 m, ist aus Kompositwerkstoffen und leichten Kunstoffen hergestellt und mit hocheffektiven Solarzellen belegt. Er entspricht 5 % der Gesamttragfläche.
Ebenfalls im März 2010 erhält das Elektroflugzeug Yuneec
E430 den ersten Preis des renommierten Brit Insurance Design
of the Year Wettbewerbs. Das herstellende Unternehmen gibt bei dieser
Gelegenheit bekannt, daß man gegenwärtig an sechs weiteren Projekten
im Bereich des Elektroflugs arbeite.
Auf der zum zweiten Mal anläßlich der Internationalen Luftfahrtmesse
AERO im April 2010 stattfindenden e-flight-expo (wobei
das ,e’ für ecological – electrical – evolutionary steht), werden verschiedene
serienreife alternative Triebwerkstechnologien gezeigt, darunter der
Hybridmotor von Flight Design (s.o.), verschiedene Dieselmotoren, der
Brennstoffzellenantrieb der Antares H2 (s.o.) sowie
diverse Elektromotoren für Flugzeuge.
Weltpremiere feiert auf der AERO das Elektro-Flugzeug Elektra One des Flugzeugingenieurs Calin Gologan und seiner in Landsberg am Lech beheimateten Firma PC Aero. Der extrem leichtgewichtige Flieger (90 kg) aus Glasfaser-Verbundstoff soll sich durch äußerst niedrige Betriebskosten, durch extrem reduzierten Lärm aufgrund der Verwendung eines 16 kW Elektromotors und einer niedrigen Propellerdrehzahl, sowie durch die (periphere) Nutzung von Solar-Energie auszeichnen. Die Spannweite beträgt 8,6 m, die Zuladung maximal 90 kg.

Mit dem 1-Personen-Flugzeug sei pro Akku-Ladung eine Reichweite von bis zu 400 km bei einer Fluggeschwindigkeit von 160 km/h möglich, bzw. eine Gesamtflugzeit von rund 3 Stunden. Das Unternehmen schätzt, daß 20 m2 Sonnenkollektoren ausreichen, um das Flugzeug 300 Stunden pro Jahr mittels Solarenergie zu betreiben, womit sich die Kosten in nur acht Jahren amortisieren sollen.
Der Einsitzer Elektra One wird primär entworfen, um im Herbst 2011 an dem von der CAFE und der NASA ausgerichteten Green Flight Challenge in Kalifornien teilzunehmen. Es soll das Flugzeug in drei Varianten als 1-, 2-, und 4-Sitzer geben, als Flugzeug mit Solarzellen sowie als Spezialvariante für den Kunstflug. Die Basisversion soll im Sommer 2011 in Produktion gehen - was, wie so oft, etwas zu optimistisch ist.

(Grafik)
Bei dem 115 kg schweren Solarflieger (Gesamtgewicht 220 kg) wird die Spannweite auf 12 m vergrößert, um auf den Tragflächen genügend Solarzellen anbringen zu können (2 kW auf ca. 11 m2). Die Energie eines sonnigen Tages soll dabei genügen, um den Flugzeugantrieb mit ausreichend Strom zu versorgen - was im Grunde zu einer tagsüber unbegrenzten Flugzeit führen könnte.
Außerdem arbeitet die PC Aero auch schon an den Modellen Elektra Two, einen Zweisitzer, der bei Nutzung des Stauraums im Flugzeug zum Viersitzer Elektra Four wird. Von Gologan stammt ferner das Konzept ,Green Village Airfield’ (Grüner Flugplatz), bei dem die Elektromobilität in der dritten Dimension, der Luft, zeigt, daß es in Kombination mit einem Solar-Hangar möglich ist, ohne jegliche CO2-Emissionen mehr als drei Stunden lang zu fliegen. Die weitere Entwicklung wird in den kommenden Jahresübersichten präsentiert.
Nachdem die Elektra One im März 2011 ihren Jungfernflug absolviert hat, plant Gologan einige spektakuläre Flüge, um die Leistungsfähigkeit von Elektroflugzeugen unter Beweis zu stellen. So soll das Flugzeug von Venedig aus über die Alpen fliegen, indem es von der Küste aus bis in eine Höhe von 3.000 m steigt, um den Alpenhauptkamm zu überwinden.
Doch schon kurz nach dem Start fällt der Motor aus, und dem Piloten Norbert Lorenzen ist klar, daß der nahe Flugplatz von Venedig nicht zu erreichen ist, weshalb er eine Notwasserung in der Lagune von Venedig macht, bei der er sich aber aus dem Wrack befreien und in ein herbeigeeiltes Motorboot steigen kann. Die Reste des Flugzeuges werden per Lastwagen zurück ins Allgäu geschafft – wo umgehend an einer neuen, verbesserten Version der Elektra One gearbeitet wird.
Im Rahmen der e-flight-expo erhält der französische Drachenflugpionier
und Fabrikant von Hängegleitern und Motordrachen Gérard Thevenot und
seine Firma Helite den AERO-E-Flight Award 2010 für
sein Hydrogen Ultralight. Der Elektromotor dieses
Luftfahrzeuges wird ausschließlich durch eine Wasserstoff-Brennstoffzelle
versorgt, ohne einen Akku oder eine Batterie an Bord zu haben.

von Gérard Thevenot
Das einsitzige Ultraleicht-Trike ist mit einem 7 kW Wasserstoff-Antrieb ausgerüstet und wiegt samt einer 5 Liter H2-Flasche nur 55 kg. Die alleine 35 kg schwere Tragfläche (eine Art Hängegleiter-Flugdrachen) ist knapp 14 m2 groß und hat eine Spannweite von 12 m. Der Verbrauch in einer Höhe von 100 m über Meer wird mit durchschnittlich 550 g pro Flugstunde gemessen, womit eine Flaschenladung H2 für rund eine Flugstunde reicht.
Thevenot hat mit einem anderen Brennstoffzellen-Projekt bereits 2006 international für Furore gesorgt. Damals gewann er den Shell Eco Marathon mit einem von ihm und der École d’Ingénieur (ESSTIN) entwickelten Wasserstoff-Straßenfahrzeug. Mit einer Quantität H2, die einem Liter Benzin entsprach, erreichte er die Weltrekord-Distanz von 4.117 km, was einem Verbrauch von 0,02343 Liter Benzin auf 100 km entspricht (!).
Über ein besonders leichtes Flugzeug erfahre ich im April 2010,
als es während dem 13. Moscow international salon of inventions and innovative
technologies ,Archimedes’ ausgestellt wird. Auch wenn es konventionell
angetrieben wird, möchte ich es hier nicht unterschlagen, da es Spezifikationen
aufweist, die bislang als ,unmöglich’ galten.

Das neue Testflugzeug X-12h von Victor Dmitriev wiegt ohne Motor nur 50 kg und braucht mit einem 16 kg schweren 30 – 50 PS Motor zum Start mit 50 – 55 km/h einen 30 m langen Streifen, zum Landen muß er doppelt so lang sein.
Der russische Flugingenieur hatte schon vor rund 30 Jahren ein nur 24,5 kg leichtes Flugzeug (ohne Motor) gebaut, dessen Flügelfläche nur 1,5 m2 betragen hat, mit dem er Eingang ins Guinness Buch der Rekorde fand. Seine Designs gelten als die mit der besten Aerodynamik weltweit. Es wäre interessant mitzuerleben, was ein Team zustandebringen würde, das neben Dmitriev einige der Solar- und Elektroflug-Pioniere umfassen würde...
Ende April 2010 findet in Rohnert Park, Kalifornien,
das bereits 4. Electric Aircraft Symposium der CAFE Foundation statt.
Es gehen die ersten Anmeldungen für die Green Flight Challenge 2011 ein.

(Grafik)
Das Crows Nest Anti-Pirate UAV des Designers Jacob
Lalinsky ist ein weiterer Kleinhubschrauber (60 cm lang und
30 cm breit), der von LiPo-Akkus angetrieben ein Auge auf weit entfernt
geschehende Dinge werfen soll. Er erscheint im Mai 2010 in
den Blogs.
Besonders interessant ist der zentral gelegene und um seine Vertikalachse schwenkbare Vortriebsrotor, der dem Elektrobot eine sehr hohe Manövrierfähigkeit gibt. Der Designer möchte ihm am liebsten als ‚Bombardier Anti-Pirate Surveillance Drohne’ im Einsatz sehen.
Die Rotorblätter bestehen aus Karbonfasern, und der mit GPS ausgestattete Heli soll mit verschiedenen Tages-, S/W Schwachlicht- und Infrarotkameras ausgestattet werden.
Im April 2010 erscheint das erste Video über den Modellflieger Bionic
Bird der französischen Firma Avitron, der sich
im elektrisch betriebenen, ferngelenkten Flatterflug fortbewegt. Das
Spielzeug mit einer Länge von 17 cm und einer Flügelspannweite von 33
cm kommt schnell auf den Markt und wird bald in unterschiedlichen Versionen
zu Preisen zwischen 60 € und 80 € angeboten.
Flügel und Körper des Vogels besitzen ein Skelett aus Polymer und Kohlefaser, wodurch er nur 9 g wiegt und mit einer vollen Akkuladung rund 8 Minuten in der Luft bleiben kann. Der Schwanzwinkel läßt sich so verstellen, daß sowohl langsame Flüge mit Stunts als auch High-Speed-Flüge möglich sind. (2015 kostet das Modell Avitron 2.0 rund 100 €).

An der National Cheng Kung University in Taiwan wird
im Mai 2010 das ‚erste UAV Asiens’ vorgestellt, das
mit einer Brennstoffzelle nebst Lithium-Ionen-Batterien betrieben wird.
Der Kleinflieger mit dem seltsamen Namen Grey-Faced Buzzard erreicht bereits auf seinem Jungfernflug Geschwindigkeiten von bis zu 100 km/h und fliegt erfolgreich 15 Minuten lang auf einer Höhe unterhalb von 300 m.
Das 22 kg schwere und fast 2 m lange Fluggerät leistet 1 kW, seine Herstellung hat 15.822 $ gekostet. Das Team arbeitet nun daran, die Flugzeit auf 3 h auszudehnen.

Schmetterling
Ebenfalls im Mai 2010 kursiert ein Zeitlupen-Video der
Ingenieure Hiroto Tanaka und Isao Shimoyama von
der Harvard University und der University of
Tokyo, denen es gelingt den Flatterflug von Schmetterlingen
nachzuahmen.
Leider gibt es bislang noch keine technischen Details zu der oszillierenden Flugmethode des winzigen Plastikflüglers, der vermutlich von einer Kleinstbatterie angetrieben wird.
Weitere Meldungen vom Mai 2010:
Karl-Engelbert Wenzel und seinem Team an der Universität Tübigen gelingt es, einen Quadrokopter vollautomatisch von einer herumfahrenden Plattform starten und auch wieder landen zu lassen; das Team der Selbstbau-Internetplattform diydrones.com beginnt mit der Entwicklung des ArduCopters, eines ebenfalls völlig selbständigen kleinen UAV-Quadrokopters; und Daniel Mellinger und einem Team der University of Pennsylvania gelingt es einen Quadrokopter so zu programmieren, daß er autonom navigierend auch durch schmale, schräge oder senkrechte Fenster und Öffnungen fliegen kann.
Im Juni wird an der TU Ilmenau das Graduiertenkolleg
‚Selbstorganisierende Mobilkommunikationssysteme für Katastrophenszenarien’
neu eröffnet, das von der Deutschen Forschungsgemeinschaft (DFG) mit
6,5 Mio. € über viereinhalb Jahre gefördert wird.
Um in Katastrophenfällen die zusammengebrochene Kommunikationsinfrastruktur für mobile Geräte schnell und effektiv wiederaufzubauen soll eine selbstorganisierende Technologie weiterentwickelt werden, bei der das System automatisch erkennt, daß die Mobilkommunikation zusammengebrochen ist, und daraufhin ohne menschliches Zutun das schadhafte Kommunikationsnetz umgehend eigenständig repariert.
Hierzu wird eine Luftbrücke aus ca. 80 cm großen Quadrokoptern aufgebaut, die in das Zielgebiet eingeflogen werden, um eine Kommunikationskette aufzubauen und so den unterbrochenen Handyempfang wieder zu ermöglichen. Außerdem können mit den besonders wendigen und leicht zu manövrierenden Mini-Hubschraubern im Katastrophengebiet auch Opfer geortet werden.
Solche Einsätze sind sehr sinnvoll – doch leider werden die UAVs bislang
hauptsächlich für militärische Zwecke genutzt. Einem Bericht vom
Juni zufolge setzt die US-Army im Irak und
in Afghanistan 333 verschiedene Arten von unbemannten Systemen –
mit steigender Tendenz. Im April hatte man den Meilenstein von einer
Million Flugstunden erreicht. Die Luftflotte umfaßt zu diesem Zeitpunkt
u.a. 87 Shadow UAS-Systeme, 1.300 Raven-Systeme sowie 16 gasbetriebene
Micro Air Vehicle (gMAV)-Systeme, die senkrecht starten können.
In Deutschland preisen Innenpolitiker die Drohnen als neue Wunderwaffen
der Polizei im Kampf gegen Kriminalität. Die Bundespolizei nutzt bereits
zwei Drohnen namens ‚Aladin’ und ‚FanCopter’ für Aufklärungsflüge der
Spezialeinheit GSG 9.
Seit September 2008 erprobt auch die niedersächsische Polizei eine 47.000 € teure und knapp 1 m breite Drohne der Firma microdrones GmbH (s.u.) vom Typ MD4-200 in Hunderten Trainingsflügen, die im Laufe von zwei Jahren zwar achtmal in realen Einsatzlagen angefordert wird, in der Praxis allerdings nicht ein einziges Mal zum Zuge kommt.
Kein Wunder – denn die gesetzlichen Vorgaben sind überaus streng: So darf die Drohne nur tagsüber fliegen, bei Windstille und nicht über Menschenmengen. Sie muß in Sichtweite des Piloten mit seiner Laptop-Funksteuerung bleiben, und kann außerdem nur 15 Minuten lang in der Luft bleiben. Außerdem hat ihre Videokamera weder ein Zoom, noch vermag sie Standbilder aufzunehmen. Im Vergleich zu den Drohnen, die man inzwischen kaufen oder mieten kann, klingt das alles äußerst dilettantisch – und zu den besten Kunden deutscher Drohnen-Hersteller zählen schon heute Detekteien und Sicherheitsfirmen.

(Grafik)
Ebenfalls im Juni hört man zum ersten Mal von der Entwicklung des ersten Hybrid-Hubschraubers der
Welt. Das deutsch-französisch-spanische Unternehmen Eurocopter,
eine hundertprozentige Tochter des Europäischen Luft- und Raumfahrt-Konzerns
EADS (European Aeronautics Defense and Space Company) arbeitet an einem eCO2avia genannten
Hubschrauber, der vollelektrisch starten und landen kann.
Angetrieben wird er von einem Zweitakt-Dieselmotor mit Turbolader vom Boxer-Typ OPOC (Opposed Piston Opposed Cylinder), der von dem amerikanischen Hersteller EcoMotors International entwickelt und gebaut wird – und an dessen Antriebswelle ein hochmoderner, gewichtsoptimierter Elektrogenerator sitzt. Mit dem erzeugten Strom werden sowohl der Haupt- als auch der Heckrotor angetrieben.
Die sonst besonders lautstarken Flug-Phasen Start und Landung können hundertprozentig elektrisch – und damit erheblich leiser – mit der Energie aus zwei Hochleistungsbatterien durchgeführt werden. Die Entwickler gehen davon aus, daß es bis zum Roll-Out aber noch mindestens fünf Jahre dauern wird.

Gleichzeitig stellen die EADS Innovation Works auf der Green Aviation Show in Paris ein winziges Elektro-Flugzeug namens CriCri vor (= frz. Grille, anfänglich auch Aerobatic genannt), das sogar kunstflugfähig sein soll. Das Flugzeug ist aus leichten Verbundmaterialien gebaut und wird von vier bürstenlosen Elektromotoren mit gegenläufigen Propellern angetrieben, die wiederum von vier 100 V / 5 Ah Lithium-Akkumulatoren gespeist werden (26,8 kg). Mit einer vollen Ladung sind 15 Minuten Kunstflug möglich – oder ein Reiseflug von 30 Minuten mit 110 km/h.
Das präsentierte Experimentalflugzeug mit einer Spannweite unter 4 m und einem Gesamtgewicht von nur 175,5 kg (einschließlich des Piloten) erreicht eine Spitzengeschwindigkeit von 250 km/h und eine Steigleistung von 5,3 m/s. Entwicklungspartner sind der Hersteller von Prototypen aus Verbundstoffen Aero Composites Saintonge und die französische Vereinigung Green CriCri Association. Seinen offiziellen Jungfernflug absolviert das vollelektrische Flugzeug Anfang September auf dem Flughafen Le Bourget bei Paris.
EADS zufolge handelt es sich dem Entwurf um ein kostengünstiges Testflugzeug zur Systemintegration elektrischer Technologien, um Programme wie das Hybridantriebskonzept für Hubschrauber zu fördern. Eine frühere, von Jean-Luc Soullier gebaute zweimotorige Version mit 45 kg Batterien an Bord absolvierte im Jahr 2009 zwar einen kurze Testflug, mußte wegen Überhitzung der elektrischen Komponente aber schon nach etwa sieben Minuten etwas unsanft wieder auf den Boden zurückkehren.
Das ursprüngliche Flugzeugkonzept geht auf ein bereits in den 1960er Jahren gestartetes Forschungsprojekt des Aerodynamik-Ingenieurs Michel Colomban zurück, dessen Ergebnis im Jahr 1973 seinen Jungfernflug macht (CriCri oder Columban MC-10) und als das kleinste und billigste zweimotorige Flugzeug der Welt gilt.

Auf der Green Aviation Show wird auch ein nostalgisch anmutendes Kleinstflugzeug
namens e-Demoichelle vorgestellt, das von der Association
pour la promotion des échelles volantes (APEV) mit einem AGNI
112 R E-Motor vom Brennstoffbetrieb auf Elektroflug umgerüstet worden
ist, der von KOKAM 74 V Lithium-Polymer-Batterien gespeist wird.
Die Spannweite beträgt über 9 m, die Länge gut 5 m, die maximale Geschwindigkeit liegt bei 120 km/h, und die durchschnittliche Reisegeschwindigkeit bei rund 70 km/h.

Zu den weiteren Exponaten gehört eine Elektroversion des ukrainischen
Motorgleiters Alatus-ME der 1994 gegründeten
Firma Aerola Ltd. aus Kiev. Es handelt sich um einen
Einsitzer mit 13,1 m Spannweite, einer Flügelfläche von 13,2 m2,
einem Leergewicht von 115 kg und einem maximalen Startgewicht von 235
kg.
Seinen Erstflug hatte der Gleiter im Januar 2009 von Flugplatz Sisteron-Vaumeilh in Frankreich absolviert und dabei eine Höhe von 2.100 m erreicht. Der Motor von Electravia liefert 26 PS an den einklappbaren Propeller, und wird dabei von einem Lithium-Polymer-Akku mit Strom versorgt, der eine Flugzeit von 30 Minuten erlaubt (andere Quellen: 1 Stunde).
Im Juni 2010 berichtet die Fachpresse auch über zwei
Projekte an der Schweizer Ecole Polytechnique Federale in Lausanne (EPFL),
wo ein Wissenschaftlerteam um Mirko Kovac Mini-Roboter
entwickelt, deren Mechaniken sich an Flug- und Sprunginsekten orientieren.
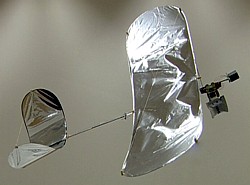
des EPFL
Die aktuellen Prototypen sind ein 4,5 g schweres Flugobjekt, dessen Flügel sich wie bei einer Fledermaus innerhalb von 50 Mikrosekunden entfallen lassen, ein 7 g wiegender Sprungroboter, dessen Bewegung sich von Heuschrecken ableitet sowie ein nur 1,5 g leichter Mikrogleiter, der mittels Sensoren automatisch auf Lichtquellen zufliegt, wie man es von Fliegen und anderen Insekten kennt.
Dieser Mylar-Gleiter hat eine Spannweite von 24 cm, eine Länge von 22 cm, ist mit einer winzigen Li-Po-Batterie ausgestattet und fliegt mit einer Geschwindigkeit von rund 1,5 m/s. Zur Steuerung wird ein 0,2 g schwerer Antrieb aus einer Formgedächtnis-Legierung entwickelt (Shape Memory Alloy, SMA), der als ‚künstlicher Muskel harmonisch in die Struktur des Mikrogleiter integriert ist und die direkte Steuerung der Ruder ermöglicht.
Die Idee bei allen drei Systemen des EPFL ist es, bionische Schwarmroboter herzustellen, die verschiedene Erkennungssysteme tragen können. Ein solcher Schwarm könnte von einem Flugzeug aus beispielsweise in ein Waldgebiet geschickt werden, um mittels Hitzesensoren Waldbrände zu erkennen. Die Prototypen der autonomen Minigleiter entstehen in Zusammenarbeit mit dem Microflyer-Labor der Hochschule.

im Nachtflug
Im Juli absolviert das Solarflugzeug Solar Impulse HB-SIA seinen
ersten 24-Stunden-Flug, der als wichtiger Schritt für die geplante Weltumrundung
gilt. Insgesamt dauert der Flug, bei dem Pilot André Borschberg auf bis
zu 9.235 m steigt, bevor er das Flugzeug vor Einbruch der Dunkelheit
wieder auf rund 1.500 m absinken läßt, 26 Stunden, 10 Minuten und 19
Sekunden, wobei die Durchschnittsgeschwindigkeit 42 km/h beträgt. Die
genannte Flughöhe wird auch dazu verwendet, um Energie zu speichern.
Da die Lithium-Polymer-Zellen immer noch sehr schwer sind, wird eine Art Hybrid-Lösung gewählt, indem ein Teil der Energie in der Flughöhe gespeichert wird. Nachts sinkt das Flugzeug dann jeweils zwei bis drei Stunden ab, bevor die Motoren wieder gestartet werden.
Mit diesem Flug beweist das Piccard-Team, daß es tatsächlich möglich ist, mit der über den Tag gewonnenen Energie die ganze Nacht durchzufliegen. Die gemachten Erfahrungen werden nun in die Konstruktion eines zweiten Flugzeuges mit besseren Solarzellen, besseren Batterien und leichteren Materialen einfließen, dessen Bau 2011 beginnen soll.
Die Grundlagenforschung erfolgt zusammen mit mittlerweile rund 80 Partner-Unternehmen, von denen einige auch finanzielle Unterstützung leisten. Von dem Gesamt-Budget in Höhe von rund 100 Mio. $ konnten bislang schon 75 Mio. $ eingesammelt werden. Unter Vorwegnahme der chronologischen Präsentation: Im September fliegt die Solar Impulse vom Heimatflughafen Payerne nach Genf und wieder zurück, und einen Tag später von Payerne nach Zürich und wieder zurück. Dabei werden erstmals Landungen auf Zivilflughäfen durchgeführt.

Ende Juli hört man auch wieder einmal von der bereits mehrfach erwähnten,
unbemannten solarbetriebenen Flugdrohne Zephyr des
britischen Rüstungskonzerns QinetiQ, die während eines
Testflugs alle bisherigen Rekorde gebrochen hat, indem sie über
zwei Wochen lang durchgehend in der Luft verblieben ist. Das
Unternehmen bringt die Leistung bei der Federation Aeronautique Internationale
(FAI) zur offiziellen Ratifizierung als Ausdauerweltrekord für unbemannte
Flugzeuge ein.
Bei dem Rekordflug am Yuma Proving Ground der US Army in Arizona ist das UAV insgesamt 336 Stunden und 22 Minuten unterwegs, führt ein Kommunikationsmodul des britischen Verteidigungsministeriums samt Videokamera mit sich, und erreicht eine Flughöhe von 21.561 m, was einen weiteren Rekord darstellt. Außerdem absolviert die 50 kg schwere Drohne, die bis zu 5 kg Nutzlast trägt, im Winterwetter der Südhalbkugel einen Dauerflug über 11 Tage, bei dem Lithium-Schwefel-Batterien zum Einsatz kommen. Im Dezember werden die Weltrekorde von der FAI bestätigt.
Das Unternehmen beschließt daraufhin, mit zwei neuen Modellen, dem Zephyr S und dem Zephyr T, in die Kommerzialisierung zu gehen - was in der Umsetzung aber noch ein paar Jahre dauert.
Ende Juli 2010 wird auf dem World Electric Aircraft
Symposium während der Luftfahrtmesse der Experimental Aircraft Association in
Oshkosh erstmals der Lindbergh Electric Aircraft Prize (LEAP)
vergeben. Die Preisträger der drei verschiedenen Kategorien werden von
Erik Lindbergh, dem Enkel von Charles and Anne Morrow Lindbergh, bekanntgegeben.
Das Preisgeld beträgt eher symbolische 25.000 $, denn dies ist genau
der Betrag des Orteig-Preises, den Charles Lindbergh im Jahr 1927 für
seine Überquerung des Atlantischen Ozeans von New York nach Paris gewonnen
hatte.
Yuneec bekommt für Design und Konstruktion des E430 Sportflugzeugs den Preis in der Kategorie ‚Bestes Flugzeug mit Elektroantrieb’. Das Flugzeug ist eine verbesserte Version des letztjährigen Modells, dessen Flugzeit sich durch verbesserte Batterien nun von 1,5 auf 2 Stunden erhöht hat (2009 lag die Zahl noch höher, s.d.). Das erste Produktions-Flugzeug soll bis Ende 2011 hergestellt werden. Letztlich erhält die zweisitzige E430 die Zulassung vom Fachverband der Ultraleichtflieger in der Bundesrepublik Deutschland (DULV) im Februar 2018.
Die Firma Sonex bekommt den Preis für das beste elektrische Flugzeug-Sub-System bzw. die beste Komponententechnologie – für ihr eFlight Initiative System, das aus einem Kontroll-, Batterie-, Kühl- und Sicherheitssystem besteht. Und der ‚Individual Achievement Award’ geht an Axel Lange für seine Entwicklung des weltweit ersten zertifizierten elektrischen Serien-Flugzeugs, der Antares 20E.

Durch persönlichen Kontakt erfahre ich im Juli auch von der litauischen
Firma JSC Sportine Aviacija ir Ko aus Prienai, die
neben verschiedenen Segelflugzeugen nun eine neuentwickelte Version
mit Vorderpropeller und Elektromotor anbietet. Den LAK-17B-FES gibt
es mit einer Spannweite von 15 m (Version A, Leergewicht 285 kg) bzw.
mit einer Spannweite von 18 m (295 kg), die eine modifizierte Geometrie
mit verbessertem Profil aufweist. Als maximale Fluggeschwindigkeit
werden 270 km/h angegeben. Mit an Bord befinden sich 31 kg Li-Po-Batterien
von Kokam in Form zweier Pakete (je 15,5 kg), die sich – zum Ausgleichen
des Gewichts von Motor und Propeller in der Nase – hinter dem hinteren
Holm befinden.
Der Vorderantrieb (Front Electric Sustainer, FES) stammt von Luka und Matija Znidarsic, beide erfahrene Segelflieger und Maschinenbauer aus Slowenien, die auch einen eigenen kleinen bürstenlosen Permanentmagnet-Gleichstrom-Synchronmotor entwickeln, der nur 7,3 kg wiegt (22 kW / 116 V).
Ein Kohlefaser-Propeller von 1 m Durchmesser entfaltet sich automatisch, wenn der Außenläufer in Betrieb ist, ansonsten legen sich die Propellerblätter an die Nase des Segelflugzeugs, um den Luftwiderstand zu verringern. Jedes der Rotorblätter wiegt nur 240 g, und das Gesamtgewicht des Power-Pakets beträgt 45 kg bis 50 kg. Besonders clever: Sind die Batterien nach einem Motor-Flug entladen, kann man sie, von der Oberseite des Rumpfes aus leicht erreichbar, entnehmen und aufladen bzw. gegen vollgeladene austauschen. Die Ladezeit des Akkus beträgt ca. 6 Stunden (2 Stunden mit Schnell-Ladegerät).
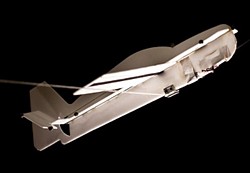
des MIT
Was Flugzeuge bislang überhaupt nicht können, dafür Vögel um so besser,
ist sanft auf Strom- oder Telefonleitungen zu landen. Die Vögel können
dies so genau, weil sie Nutzen aus dem komplizierten physikalischen
Phänomen namens Strömungsabriß ziehen – das bei Flugzeugen dagegen
oftmals zum Absturz führt.
Ein Team des MIT um Prof. Russ Tedrake stellt im Juli 2010 ein kleines Modell-Segelflugzeug vor, das durch eine spezielle Steuerung die gleiche Fähigkeit der Vögel bekommt. Neben einer erheblichen Verbesserung ihrer Wendigkeit sind solche Roboter-Flugzeuge damit aber auch potentiell in der Lage, durch Aufsetzen auf Stromleitungen ihre Batterien wieder aufzuladen, indem sie die emittierten Magnetfelder der Leitungen nutzen.
Für das Systemdesign erhält der Doktorand Rick Cory von Boeing den Engineering Student of the Year Award 2010. Im Juni 2014 erscheinen dann erneut Berichte über die Entwicklung, die zwischenzeitlich aber nicht signifikant weitergekommen zu sein scheint.

Die Firma Sikorsky Aircraft gibt bekannt, daß sie in
diesem Jahr an einen manntragenden Elektro-Hubschrauber gebaut habe.
Das Projekt Firefly basiert auf dem beliebten zweisitzigen
Trainings-Hubschrauber S-300C, der schon in den 1950er Jahren
von Hughes Aircraft hergestellt wurde.
Nun wird dessen bisheriger 190 PS Vierzylinder-Benzinmotor durch einen gleichstarken 142 kW Elektromotor der kalifornischen Firma U.S. Hybrid ersetzt, der von 135 Ah Lithium-Ionen-Batterien des deutschen Herstellers GAIA gespeist wird und eine Flugzeit von 15 Minuten ermöglichen soll. Die jeweils 150 Zellen befinden sich in zwei luftgekühlten Boxen an beiden Seiten des Cockpits. Erstmals vorgestellt wird der 974 kg schwere Elektro-Hubschrauber bei der EAA Airventure in Oshkosh.
Auch der bekannte Flugzeug-Hersteller Cessna beginnt
sich mit dem Elektroflug zu beschäftigen und tut sich deshalb mit den
Firmen Bye Energy Inc. und Bye Aerospace zusammen,
die seit 2008 ein von der FAA bereits zertifiziertes
elektrisches Antriebssystem für die viersitzige, einmotorige C
172 Skyhawk entwickelt haben. Die erwartete Reichweite der umgerüsteten
Cessna beträgt lediglich zwei Stunden (andere Quellen: vier Stunden),
doch den Entwicklern zufolge sei die Betriebskostenersparnis enorm.
In den USA kostet die Flugstunde mit der klassischen kolbenmotorgetriebenen C 172 rund 100 $, in Europa sogar noch wesentlich mehr. Mit dem neuen Elektromotor sollen die Kosten pro Flugstunde deutlich sinken. Das Unternehmen hofft, das erste Elektro-Modell bis zum Jahresende in der Luft zu haben.

(Grafik)
Im August 2010 stellt Boeing das Konzept
eines Plugin-Hybrid-Jets vor, das dabei helfen soll, mehr als 70 % Kerosin
einzusparen. Das SUGAR Volt benannte Design entstammt
dem Boeing-Projekt SUGAR (Subsonic Ultra Green Aircraft Research), bei
dem – finanziert durch die NASA – ,grüne’ Technologien erforscht werden,
die bis 2050 marktreif sein könnten. Bei den anderen
Ideen des SUGAR-Projekts handelt es sich zum Beispiel um Flugzeuge, die
mit Wasserstoff- oder Methan-Brennstoffzellen angetrieben werden.
Der Batterie-Flieger funktioniert ähnlich wie Fahrzeug-Hybrid: sobald das Flugzeug am Gate steht, werden seine Akkus durch das Stromnetz des Flughafens aufgeladen. Der Kerosinbetrieb der zwei Hybridtriebwerke ist in erster Linie für den Start notwendig. Erreicht das Flugzeug seine Reiseflughöhe, wird auf Akkubetrieb umgeschaltet.
Nach gegenwärtigem Stand müßte die Spannweite des Flugzeugs gegenüber heutigen Modellen allerdings fast verdoppelt werden, was zwar kürzere Take-Offs ermöglichen, aber auch zu Platzproblemen auf den Flughäfen führen könnte. Daß das Elektroflugzeug vermutlich nicht vor 2030 auf den Markt kommen kann, liegt an der Akku-Technologie, die bis dahin noch erheblich besser werden muß.
Die NASA selbst arbeitet am Glenn Research Center in Cleveland ebenfalls an der Entwicklung von Hybridtriebwerken (Turboelectric Distributed Propulsion, TeDP), die für ein Nurflügelflugzeug N3-X mit 300 Plätzen gedacht sind. Das TeDP-System soll supraleitende Generatoren, Motoren und Übertragungsleitungen nutzen, wobei die Energieerzeugungs- und Schuberzeugungs-Komponenten weitgehend voneinander getrennt werden.
Im selben Monat berichtet der deutsche Drohnenhersteller Microdrones (s.u.),
daß er eine mit Kameras bestückte Drohne an die kalifornische Zentrale
von Google geschickt habe, die perfekt dazu geeignet sein soll, um z.B.
Luftaufnahmen für den Kartendienst Google Earth zu erstellen oder den
konzerneigenen Windpark zu überwachen.
Google dementiert diese Meldung ungewöhnlich deutlich, möglicherweise weil in den meisten Ländern der westlichen Welt bislang die Rechtsgrundlage für den entsprechenden Einsatz solcher Drohnen fehlt.

Hawk Eye
Ein mit Kamera ausgerüsteter Mini-Hubschrauber, der diesen Herbst in
den Handel kommt, kann das aber auch: Der Air Hogs Hawk Eye bietet
für nur 65 $ eine fünfminütige Video-Aufzeichnungen mit 320 × 240 Pixeln
bzw. bis zu hundert Fotos mit maximal 620×480 Pixeln, deren Daten sich
nach der Landung per USB herunterladen lassen.
Mit der Energie von drei AAA-Akkus, die in 35 Minuten aufladbar sind, erreicht der Mini-Spion eine Flugdauer bis zu 5 Minuten (2013 wird das Teil im Netz für einen Preis ab 16 € angeboten – scheint von dem Hersteller Air Hogs in Toronto aber nicht mehr produziert zu werden).

(Grafik)
Ebenfalls im August 2010 startet ein gemeinsames Projekt
der Firma Lange Research Aircraft GmbH und des Deutschen
Zentrums für Luft- und Raumfahrt (DLR), bei dem ein Brennstoffzellenflugzeug Antares
H3 entwickelt wird – als Nachfolger der Antares DLR-H2 (s.u. 2009).
Der Erstflug des neuen Motorseglers, der Nutzlasten von bis zu 200 kg tragen kann und in der Endausbaustufe eine Reichweite von bis zu 6.000 km (im Vergleich zu 750 km beim Vorgängermodell) sowie eine Flugdauer von mehr als 50 Stunden (im Vergleich zu bisher fünf Stunden) ermöglichen soll, ist für das Jahr 2011 geplant.
Angetrieben wird das Flugzeug durch Elektromotor und Brennstoffzelle, wobei sich die Wasserstofftanks in 4 stromlinienförmigen Behältern unter den Flügeln befinden. Das Abfluggewicht beträgt 1,25 t. Dieses Projekt wird im Rahmen des vom Bundesministerium für Verkehr, Bau und Stadtentwicklung initiierten Nationalen Innovationsprogramms Wasserstoff und Brennstoffzellentechnologie gefördert.
Die Firma AeroVironment wiederum, die uns in dieser
Präsentation schon häufig begegnet ist, führt in diesem Monat den ersten
erfolgreichen Flug mit ihrem Global Observer (1001)
unmanned aircraft system (UAS) durch, der dabei auf eine Höhe von 4.000
Fuß steigt und eine Reihe von Manövern durchführt, bevor er eine Stunde
später wieder landet.

Der etwa 3,5 t schwere Flieger mit einer Spannweite von 53,3 m wird von vier Propellern vorwärts bewegt, die von Elektromotoren betrieben werden. Als Nutzlast des ersten Prototypen werden 180 kg angegeben, wobei von einer Flugdauer von bis zu einer Woche in einer Höhe zwischen 55.000 und 65.000 Fuß ausgegangen wird.
Beim Erstflug, von der kalifornischen Edwards Air Force Base aus, kommen zur Energieversorgung noch Batterien zum Einsatz, die dann im Januar 2011 durch einen mit Wasserstoff betriebenen Verbrennungsmotor mit angeschlossenem 60 kW Generator ersetzt werden.
AeroVironment hatte im Jahr 2005 bereits eine mit flüssigem Wasserstoff betankten Prototyp Odyssey entwickelt – und im September 2007 gemeinsam mit dem Department of Defense und der NASA das Joint Capability Technology Demonstration (JCTD) Projekt gestartet, das von sechs US-Regierungsbehörden mit mehr als 120 Mio. $ gefördert wird. Kein Witz: Genau am 1. April 2011 stürzt der ferngesteuerte Global Observer auf seinem neunten Testflug auf der Edwards AFB aus bisher ungeklärter Ursache ab (s.u.).

In Israel wird eine weitere neuartige batteriebetriebene Flugdrohne aus
leichtem Carbon vorgestellt. Die militärisch inspirierte 3G
Drone der Firma Arad Technologies Ltd. soll
dabei helfen, Wasserverluste punktgenau zu ermitteln. Die mittels GPS
selbststeuernde Drohne wird durch eine Art Katapult von Hand gestartet,
und landet via Fallschirm. Sie kann Verbrauchsdaten und Informationen
über Diebstahl, Sabotage, Lecks oder ausgefallene Zähler des von der
Firma patentierten Wasser-Zähler-System erfassen.
Die Octave Ultraschall-Volumenwasserzähler der Firma sind mit einer 3G-Drahtlos-Technologie, einen Mikrocontroller mit LCD-Display und Li-Io-Batterien mit mehr als 10 Jahren Lebenserwartung ausgestattet und übertragen alle 11 bis 30 Sekunden Daten, die von einer Drohne abgeholt werden können. Diese Daten werden dann per Computer analysiert, um abzuschätzen, wie viel Wasser verbraucht wurde, wie viel verloren gegangen ist, und um festzustellen, wo Manipulationen stattgefunden haben. Arad hat bereits Kunden in den USA und expandiert nun nach Brasilien, China, Indien und Rußland – scheint das Drohnenprojekt dann aber doch nicht weiter zu verfolgen.

in the sky
Und endlich gibt es auch wieder einmal einen künstlerischen Ansatz, der
die Solarenergie mit dem Fliegen verbindet: Beim 2010 Land
Art Generator Initiative Designwettbewerb wird im August das Projekt
‚LAGI Light and wings – Choreographies in the sky’ mit einer besonderen
Erwähnung ausgezeichnet. Das Büro Carlos Campos Yamila Zynda
Aiub Architects (CCYZAA) konzipierte dieses Projekt für einen
Standort neben dem Ras Al Khor Wildschutzgebiet in Dubai.
Das Projekt besteht aus einem Schwarm solarbetriebener Geräte, die man gut als Roboter-ähnliche Vögel bezeichnen könnte. Mit einer Reihe von LED-Leuchten und ihren GPS-Navigation-Einheiten sind die ‚Vögel’ in der Lage, zum Vergnügen der Zuschauer am Himmel verschiedene leuchtende Muster zu bilden.
Da die Flügel aus einer Photovoltaik-Folie bestehen, werden sie vollständig von der Sonnenenergie angetrieben, die sie tagsüber sammeln. Dabei können sie gleichzeitig eine 100 x 100 m große und angenehme ‚Schattendecke’ beispielsweise über einem Park bilden – während in der Nacht eine unbegrenzte Zahl verschiedenster Lichtskulpturen denkbar ist.

Im September 2010 stellt eine CriCri eines
(ungenannten) französischen Piloten mit 259 km/h einen neuen Rekord auf.
Das Elektroflugzeug wird von zwei 35 PS Elektromotoren der Firma Electravia
angetrieben und mit speziell konzipierten Propellern ausgestattet.
Die Firma behauptet, die Geschwindigkeit mit nur 75 % der möglichen Leistung erreicht zu haben, und daß eigentlich bis zu 352 km/h erzielbar wären, wenn die Flugzeugzelle des winzigen Einsitzers nicht für eine Maximalgeschwindigkeit von 257,7 km/h ausgelegt wäre.
Die Firma LaserMotive, die im November des Vorjahres
den Power-Beaming-Wettbewerb der NASA gewonnen hatte, führt im Rahmen
der AUVSI Unmanned Systems Conference einen kleinen, 22 g schweren Modellhubschrauber vor,
der sich mittels Energieübertragung per Laserstrahl in
der Luft halten kann. Bislang ist nach sechs Stunden Schluß, weil der
installierte kommerzielle Bürstenmotor nicht für einen so langen Betrieb
gedacht ist. Bei der Demonstration wird das Licht mehrerer Nahinfrarot-Laser
in einen 7 cm breiten Strahl gebündelt, der automatisch den Hubschrauber
verfolgt, während dieser mit geeigneten PV-Zellen ausgestattet ist, um
aus dem Laserstrahl Strom für seinen Motor zu gewinnen.
LaserMotive ist davon überzeugt, daß die Energieübertragung per Laser vielseitig eingesetzt werden und unbemannte Fluggeräte mit Energie versorgen kann, solange der Laser nur passend ausgerichtet bleibt. Denkbar ist auch, daß die Fluggeräte ihre internen Akkus über einer ‚Laserbasis’ aufladen und somit praktisch beliebig lange in der Luft verweilen können.
Einer Studie zufolge ist es ebenfalls möglich, einen bodengestützten Energiestrahl mit ausreichender Leistung zu nutzen, um eine Rakete zu starten – beispielsweise, indem der Wasserstoff in den Tanks auf eine Temperatur von 2.500° Kelvin (~ 2.226°C) aufgeheizt wird, was heiß genug ist, das Gas mit genügender Leistung durch die Düsen zu treiben und das Raumfahrzeug hinauf zu befördern.

Quadrokopter
Alternativ kann der Boden der Rakete aus einem Stück Metall bestehen, das durch einen gepulsten Laser verdampft wird. Die dabei entstehende Wolke aus Metalldampf kann dann von einem zweiten Laserimpuls überhitzt und die Rakete himmelwärts geschickt werden. Die meisten hierzu erforderlichen Technologien existieren bereits, wie z.B. der gewaltige Raytheon-Laser zum Abschießen von Flugzeugen, der fast genau dem Bedarf entspricht.
Mehr über diese Einsatzbereiche findet sich im Kapitelteil Alternative Antriebe in der Raumfahrt.
Es gelingt LaserMotive jedenfalls schon im darauffolgenden Monat, mit seiner Laser Power Beaming Technologie einen etwa 1 kg schweren Quadrocopter vom Modell Asctec Pelican des deutschen Herstellers Ascending Technologies für eine Rekorddauer von 12 Stunden, 26 Minuten und 56 Sekunden lang 10 m hoch in der Luft zu halten. Beendet wird der nächtliche Dauerflug auf dem Ausstellungsgelände einer Flugmesse nur deshalb, weil die Halle am Morgen für das Publikum geöffnet werden muß.
Auch dieses UAV hat speziell für den nahen Infrarotbereich sensibilisierte PV-Zellen aus Gallium und Arsen (statt Silizium) an der Unterseite. Zudem wurde es mit einer besonderen Leistungselektronik sowie einem autonomen System zur Positionsregelung ausgestattet. Vom Boden aus wird ein 2,5 kW Dioden-Laserstrahl über Spiegel und Linsen in die Luft gerichtet, was der Stärke von 250.000 Laser-Pointern entspricht. Der Quadrokopter schwebt über dem Laser und lädt seinen Akku, kann anschließend einige Minuten umherfliegen, und kehrt erneut zurück wenn der Akku wieder nachläßt.
Daß die Technologie inzwischen auch eine Zukunft hat, beweist die Entwicklung bei Lasern. Während ihr Wirkungsgrad vor wenigen Jahren nur 40 % betragen hat, erreicht er inzwischen rund 60 % - und dies bei verringerten Kosten. Dazu kommt aber auch noch das zunehmende Interesse des Militärs, was immer ein starker Motor für solcherart Fortschritte ist... die dann später auch auf dem zivilen Markt ihren Einsatz finden.
Die genannte Firma Ascending Technologies GmbH (AscTec) aus Krailling bei München, die uns im Folgenden noch häufiger begegnen wird, ist eine im Jahr 2007 durch Michael Achtelik, Klaus-Michael Doth, Daniel Gurdan und Jan Stumpf erfolgte Ausgründung der TU München, die 2007 mit der Produktion des AscTec Falcon 8 beginnt, einer ferngesteuerten Flugdrohne (V-Form Oktokopter), die aufgrund ihres großen Erfolgs schon 2009 in die Serienfertigung geht.

Eigenen Aussagen zufolge hätten die Jugend forscht-Bundessieger Gurdan und Doth durch die Erfindung und Entwicklung des Silverlit X-UFOs ab 2002 auch maßgeblich zum internationalen Hype rund um Quadro- und Multikopter beigetragen.
Im Jahr 2012 ist das Unternehmen das weltweit erste, das eine Drohnen-Lightshow veranstaltet, Zur Eröffnung des Ars Electronica Futurelab kommen 49 Flugkörper zum Einsatz. Im November 2015 wird mit 100 Drohnen sogar ein Guinnes-Weltrekord erreicht.
2013 folgt eine Kooperation mit der Firma e-volo, der das Herzstück der AscTec-Technologie, die Steuerungseinheit AscTec Trinity, zur Verfügung gestellt wird, um den Jungfernflug des ersten elektrisch betriebenen und manntragenden Multikopter möglich zu machen. Mit dieser Technik gilt AscTec als einer der Marktführer im professionellen Bereich.
Im Januar 2016 wird die Firma von dem US-amerikanischen Halbleiterherstellers Intel für eine unbezifferte Summe gekauft. Aktuelle Projekte, an denen AscTec mitwirkt, sind die European Robotics Challenge (EuRoC), bei der es um Anlageninspektion und Instandhaltung mit UAVs geht; UAV – Assisted Ad Hoc Networks for Crisis Management and Hostile Environment Sensing (ANCHORS), wo Drohnen die Lage im Katastrophenfall erkunden; Teaming for Robot-Assisted Disaster Response (TRADR), was die nachhaltige Interaktion von Mensch und Roboter beim Einsatz in einer Krise betrifft; sowie das vom Bundesministerium für Bildung und Forschung geförderte und in Kooperation mit dem DLR umgesetzte Projekt Wildretter, das dem Wildtierschutz bei der Grünlandmahd dient (s.o.).
Die Angebotspalette der AscTec umfaßt den Oktokopter Falcon 8, den Hexakopter Firefly, den Quadrokopter Hummingbird sowie den Forschungs-Quadrokopter Pelican, der bei einem Eigengewicht von 1 kg eine maximale Nutzlast von 650 g tragen und mit dieser 16 Minuten in der Luft bleiben kann.
Zur Abrundung noch die weitere Geschichte der Ascending Technologies: Im November 2016 wird mit 500 Drohnen ein neuer Guinnes-Weltrekord erreicht, dem sich in den Folgejahren diverse weitere Drohnen-Shows anschließen.
Im Juni 2022 übernimmt Kimbal Musk, der jüngere Bruder von Elon und u.a. auch Aufsichtsratsmitglied von SpaceX und Tesla Inc. ist, die Lightshow-Abteilung von Intel, um das Drohnenunternehmen Nova Sky Stories GmbH in München (später: Gilching) zu gründen, das die Grenzen des Geschichtenerzählens erweitert, indem es diese mit Licht und Ton in den Nachthimmel zeichnet. Die Einsätze sind auf der Homepage des Unternehmens gut dokumentiert.
Während die im Jahre 2008 am Harvard Microrobotics
Lab. entwickelte mikro-elektromechanische Fliege (s.o.) nun
ein 5 mm langes und 0,01 g leichtes Ausgleichsgetriebe namens PARITy
verpaßt bekommt (= Passive Aeromechanical Regulation of Imbalanced Torques),
damit die beiden Flügel die gleiche Menge an Drehmoment erzeugen (es
gleicht einem Automobil-Differential, ist aber nur ein Millionstel so
groß), stellen in diesem Sommer Wissenschaftler um Hod
Lipson und Charlie Richter von der Cornell
University in Ithaca, New York, winzige Roboter-Insekten
mit Schlagflügeln vor, die erstmals aus einem 3D-Drucker kommen.

Mikroflieger
Indem die Flugdynamik unterschiedlichster Formen und Konfigurationen getestet wird, könnten die künstlichen Insekten einen wichtigen Schritt zur Entwicklung kleinerer und effizienterer Flügel bilden.
Der genutzte 3D-Drucker (Object EDEN260V) ist in der Lage, nur 40 Mikrometer breite Objekte herzustellen, sowie nur 16 Mikrometer dünne Filme. Ein weiterer Vorteil ist die Geschwindigkeit des Druckens, denn sobald ein neues Flügeldesign einprogrammiert ist, dauert es weniger als eine Stunde, bis ein entsprechender Satz fertig ausgedruckt wird. Dies macht es möglich, solch komplexe Strukturen wie verzogene oder krumme Flügel zu schaffen, um deren Leistung zu verbessern.
Der bislang jüngste Roboter ist aus Polyester hergestellt, das über einen Kohlefaser-Rahmen gespannt ist, wiegt nur 3,89 g und kann 85 Sekunden lang fliegen. Seine Tragkraft von 1,5 g entspricht passenderweise dem Gewicht der benötigten Batterie.
Die Wissenschaftler wollen ihren 3D-Druck-Ansatz nun dazu nutzen, um eine breite Palette von verschiedenen Flügeldesigns zu schaffen und zu analysieren, und um diese Informationen anschließend in ein Computer-Modell zu integrieren, welches mit Hilfe eines genetischen Algorithmus das perfekte Flügelpaar entwickeln soll.
Ebenfalls im September 2010 erreicht das Vulture-Programm
der Defense Advanced Research Projects Agency (DARPA), bei dem ein Solar-Flieger
entwickelt wird, der bis zu fünf Jahre ununterbrochen in
einer Höhe von 20 km – 30 km in der Luft bleiben kann, seine 2.
Phase (Vulture II).

(Grafik)
Im Zuge eines Vertrages in Höhe von 89 Mio. $ werden die Boeing Phantom Works einen Demonstrator in voller Größe entwickeln, der im Jahr 2014 seinen ersten Flug machen soll. Der SolarEagle wird hocheffiziente Elektromotoren und Propeller sowie einen 122 m langen Flügel besitzen, um mehr Solarenergie einzufangen und die Aerodynamik zu verbessern. Die Zuladung soll 450 kg betragen.
Zu den wichtigsten Lieferanten für das Programm gehören Versa Power Systems sowie QinetiQ, die auf Erfahrungen mit ihrem eigenen Solarflugzeug Zephyr zurückgreifen können (s.o.).
Ein spezieller Elektromotor, extrem leicht, viermal so effizient wie konventionelle Flugzeugmotoren, und doch robust genug für die eisigen Temperaturen von -60°C in großen Höhen, wird an der Newcastle University entwickelt, die auch schon an den der Entwicklung des Zephyr beteilgt war. Während des Tests soll der Demonstrator für 30 Tage in der oberen Atmosphäre bleiben und tagsüber Sonnenenergie tanken, die zur Stromversorgung während der Nacht in Brennstoffzellen gespeichert wird. Aus Gründen, die herauszufinden mir bislang noch nicht gelang, werden die Arbeiten an dem SolarEagle im Jahr 2012 eingestellt.

Auch das Projekt der NASA, über das ich im Mai 2007 berichtet
hatte (s.o.), ein Flugobjekt, das sich solar angetrieben alleine mittels
Flügelschlag fortbewegen soll, scheint weiterzukommen... oder von der
Konkurrenz überholt zu werden. Im September 2010 berichten
die Fachblogs nämlich davon, daß sich ein Team des EPFL in Lausanne ernsthaft
mit der Entwicklung dieser fliegenden Roboter beschäftigt. Schwärme von
ihnen sollen ein Swarming Micro Air Vehicle Network (SMAVNET) bilden,
um während einer Katastrophe ein Kommunikationsnetz für Rettungskräfte
zu schaffen.
Das Schweizer Entwicklungsteam ist bestrebt, die Roboter so leicht, billig und einfach wie möglich zu machen. Daher sollen die Flieger eine Funktechnik verwenden, um zu kommunizieren, zu navigieren und sich miteinander zu koordinieren, denn damit sind sie in der Lage, auch ohne GPS-Systeme, Kameras oder noch teurere Hardware wie Radar oder Laser ihr eigenes Kommunikations-Netzwerk aufzubauen.
Die ersten Modelle – noch ohne PV-Unterstützung – sind aus expandiertem Polypropylen (EPP) gefertigt, verfügen über einen an der Rückseite montierten Elektromotor, wiegen 420 g, haben eine Spannweite von 80 cm und können mit ihrem Li-Po-Akku 30 Minuten lang fliegen.

Im Oktober 2010 stellt die Firma Israel Aerospace
Industries (IAI) auf der Latrun Konferenz zwei unbemannte militärische
Luftfahrzeuge Panther und Mini Panther vor,
die als Neuerung mit einem patentierten Schwenk-Rotor ausgestattet sind.
Dies gibt den UAVs die Möglichkeit, auch senkrecht zu starten und zu
landen, wobei dies mit dem Klick auf eine Schaltfläche der Bedienkonsole
automatisch erfolgt.
Das etwa 65 kg schwere größere Modell ist u.a. mit einer stabilisierten Tag/Nacht-Kamera und einem Laser-Entfernungsmesser ausgestattet und wird von drei extrem leisen Elektromotoren angetrieben, mit denen es eine Flughöhe bis 10.000 Fuß und einem Aktionsradius von über 60 km erreicht. Die maximale Flugzeit beträgt 6 Stunden.
Die kleinere Version mit einem Gewicht bis zu 12 kg kann etwa zwei Stunden lang Flüge durchführen. IAI hat bereits erfolgreiche Flugtests mit den Prototypen durchgeführt und hofft, die Produkte im kommenden Jahr betriebsbereit zu haben.

Im November kommt ein weiterer Himmelsspion auf den Markt, der sich ein
wenig von den sonst üblichen Systemen abhebt – denn es ist kein Quadrokopter. Der Swinglet
CAM des Schweizer Herstellers senseFly -
einem Spinoff der EPFL - ist ein kleines, deltaförmiges Flugzeug,
das mit seiner integrierten 12-Megapixel-Kamera hochauflösende Luftaufnahmen
anfertigen kann und für Überwachungs- und Sicherheits-Anwendungen,
Kartierung und Wildbeobachtungen gedacht ist.
Mit einer Spannweite von 80 cm und einem Gewicht von 500 g erreicht das Objekt mit seinem Lithium-Polymer-Akku und seinen bürstenlosen Elektromotor eine Höchstgeschwindigkeit von 50 km/h, hat eine Reichweite von bis zu 20 km und kann sich für 30 Minuten in der Luft halten.
Die Drohne kann ferngelenkt, aber auch so programmiert werden, daß sie einer vorgegebenen Flugbahn aus bis zu 20 GPS-Koordinaten folgt. Sehr ansprechend ist die Lieferung in einem angemessen dimensionierten Koffer samt Funkmodem, Akku und Ladegerät. Der Betreiber muß in diesem Fall die mitgelieferte ‚e-mo-tion’-Steuerungssoftware auf ein geeignetes Notebook laden – es gibt aber auch eine Version, die eine robuste Notebook-Bodenstation umfaßt.
Ebenfalls im November 2010 ist zu erfahren, daß ein
Team an der University of Bristol an einer Drohne arbeitet,
die sowohl fliegen als auch schwimmen kann. Als Vorbild wird ein Seevogel
namens Trottellumme (uria aalge) ausgewählt. Die Forscher planen, mit
ihren Berechnungen, Modellen und Simulationen einen Roboter mit veränderlichen
Flügeln wie in der Natur zu entwerfen.
Einfache Änderungen beim Vogelflügel führen zu einer Verringerung der Fläche, welche den Profilwiderstand um mehr als 50 % reduziert – und damit auch den Gesamtenergiebedarf. Diese Fähigkeit ermöglicht es den gemeinen Trottellummen an Land entlang der Küste zu nisten, bis zu 30 km weit aufs Meer zu fliegen, ins Wasser zu tauchen und dort mit den Flügeln zu schlagen, um zu schwimmen und ‚Seafood’ zu jagen. Ein Hybrid-Roboter mit derartigen Fähigkeiten könnte beispielsweise von Bohrinseln aus Unterwasser-Pipelines inspizieren.
Bevor ein Prototyp hergestellt werden kann, muß neben viel Grundlagenforschung auch das Problem einer Energiequelle gelöst werden, die leicht genug ist, um Flugoperationen zu ermöglichen, gleichzeitig aber ausreichend Leistung hat, um sich auch für die Fortbewegung unter Wasser zu eignen. Ziel sind eine Flugreichweite von 2 km bei einer Geschwindigkeit von 20 m/s, sowie eine Schwimmreichweite von 500 m bei bei einer Geschwindigkeit von 1,5 m/s - was in ewa den Werten des Seevogels entspricht.
Eine dritte Meldung in diesem November betrifft die Forscher Prof. Alexander
Alexeev und dessen Doktoranden Hassan Masoud am Georgia
Institute of Technology (Georgia Tech), die mit einem neuen
Computermodell das Rätsel des Schlagflügelflugs teilweise
gelöst haben. Da sich die Aerodynamik beim Bau immer kleinerer Fluggeräte
stark ändert, wird mit Hilfe von Rechenmodellen versucht, einen Einblick
in die Schlag-Aerodynamik zu gewinnen und die aerodynamischen Kräfte
zu ermitteln, die für den Antrieb dieser Fluggeräte erforderlich sind.
Um die Auftriebs- und Schwebe-Aerodynamik von flexiblen Flügeln zu untersuchen, nutzen die Wissenschaftler dreidimensionale Computersimulationen und stellen dabei fest, daß der einfache wellenförmige Auf- und Abschlag der Flügel bei der Resonanzfrequenz einfacher zu realisieren ist und einen Auftrieb erzeugt, der mit dem von geflügelten Insekten vergleichbar ist, die einen wesentlich komplexeren Schlag ausführen.
Der nächste Schritt für die Forscher besteht darin, zu untersuchen, ob Flügel mit ungleichmäßiger Struktur bzw. Flügel, die durch einen asymmetrischen Schlag angetrieben werden, die Resonanzleistung von Schlagflügeln weiter verbessern können. Anschließend wollen sie Mikroflugzeuge entwickeln, die dieses Modell anwenden und unter realen Bedingungen steuerbar sind. Es läßt sich bislang aber keinerlei Bestätigung dafür finden, daß dies auch erfolgt ist.

Im Dezember 2010 feiert die Firma Sonex Aircraft auf
dem Wittman Regional Airport in Oshkosh, Wisconsin, den Erstflug ihres
Elektroflugzeug E-Waiex, einen
sogenannten Proof-of-Concept-Prototyp, an dem seit vier Jahren gearbeitet
wird. Wobei es eigentlich nur ein kurzer Flug über die Länge der Starbahn
ist, wie die Presse berichtet.
Bei dem Flieger handelt es sich um einen Zweisitzer mit V-Leitwerk und Spornfahrwerk, der sich von der ebenfalls zweisitzigen Sonex ableitet, einem von mehreren als Bausatz konzipierten Flugzeugen des Unternehmens. Als Antrieb der neuen Elektroversion dient ein 54 kW Gleichstrommotor, dessen Energieversorgung eine 14,5 kWh Lithium-Polymer-Batterie übernimmt. Ergänzt wird das Antriebspaket durch eine elektronische Motorregelung und ein Batterie-Managementsystem.

Aufgrund persönlicher Kontaktaufnahme werde ich in diesem Jahr auch auf
die im Oktober 2005 gegründete Firma microdrones
GmbH in Siegen aufmerksam, die eine ganze Palette hochprofessioneller
Quadrokopter-Drohnen anbietet. Das erste Produkt, die microdrone md4-200,
befindet sich seit April 2006 auf dem Markt und wird
hundertfach verkauft. Sie wiegt 800 g, kann Nutzlasten bis 200 g aufnehmen
und bis zu 30 Minuten lang fliegen.
Im Jahr 2010 kommt das Modell md4-1000 hinzu, das mit einem Tempo von 15 m/s Flugzeiten von bis zu 88 Minuten oder auch Nutzlasten bis zu 1,2 kg erlaubt.

Im Jahr 2010 wird mit Hauptsitz in Kassel, Deutschland,
die Firma Aibotix GmbH gegründet. Das Flaggschiff des
Unternehmens, der Aibot X6, ist ein Hexakopter, der
eine Kombination aus autonomen Flügen, intelligenter Flugplanung, Datenverarbeitung
und -analyse sowie hochpräzisen Sensoren bietet und für Anwender aus
den Bereichen Vermessung und Mapping, Industrieinspektionen sowie Land-
und Forstwirtschaft gedacht ist.
Die Firma ist ab 2014 Teil der schwedischen Hexagon AB, einem weltweit führenden Anbieter von Informationstechnologie.
Ansonsten werde ich mich in Zukunft nicht mehr mit den vielen Quadrokopter-Modellen
aller Preisklassen beschäftigen, von denen fast wöchentlich neue Versionen
auf den Markt kommen. Ausnahmen wird es bei der Entwicklung neuer Flugalgorithmen
oder im Falle besonders interessanter Ansätze geben, z.B. in Kunstflugbereich.
Das Thema an sich zieht inzwischen immer größere Kreise und ist bereits
zum Politikum geworden. Der gegenwärtige Stand in Deutschland ist,
daß private Mini-Drohnen, zumeist sind dies Quadrokopter mit vier Rotoren
in Leichtbauweise, ohne Starterlaubnis genutzt werden können, wenn
sie weniger als 30 m hoch fliegen und weniger als 5 kg wiegen. Was
in dieser Klasse bereits alles möglich ist, habe ich in vielfältiger
Weise gezeigt. Datenschutzbeauftragte befürchten nun ein zunehmendes
Schnüffeln unter Nachbarn, und daß die Privatsphäre durch staatliche
und private Ausspähung eingeschränkt werden könnte.
Beim Castor-Transport im November beispielsweise werden die größeren Profi-Modelle der Firma microdrones von der niedersächsischen Polizei (die diese als Drehflügler bezeichnet) viermal dafür eingesetzt, mit einer Tageslichtkamera und einer Dämmerungskamera Luftbilder von den Demonstranten zu machen, die in Echtzeit an die Bodenstation übertragen und dort aufgezeichnet werden. Der Streit zwischen der Bürgerinitiative Lüchow-Dannenberg und der Polizei um diesen Form von Überwachung und die damit zusammenhängende Verletzung der Persönlichkeitsrechte von Demonstranten wird ganz sicher nicht der letzte sein, bei dem es um Drohnen geht.
Und was den bemannten Elektroflug anbelangt, so gibt es auch hier eine interressante Anmerkung: In dem Film Iron Man 2, der in diesem Jahr erscheint, hat Elon Musk einen Cameo-Auftritt, bei dem er zu Tony Stark sagt, er habe die tolle Idee für einen Elektro-Jet, worauf Stark antwortet, „dann bringen wir ihn in die Luft.“
Weiter mit den Elektro- und Solarfluggeräten...