Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2018 (D)
Technologische Entwicklungen (Fortsetzung)
Nachdem es mehrere Jahre lang keinerlei neuen Informationen mehr über
das Aufladen im Flug mittels Laserstrahlen gegeben
hat, stellt auf der gleichen IEEE-Konferenz ein Ingenieursteam der Washington
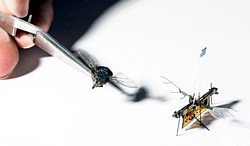
University um Prof. Sawyer Fuller eine insektengroße
Roboterdrohne namens RoboFly vor, die von Lasern aufgeladen
wird.
Die Technologie an sich ist nicht neu, und ich habe bereits über verschiedene Umsetzungen berichtet, wie das Flugzeugmodell der NASA im Jahr 2003, das gemeinsam mit dem Dryden Flight Research Center und der University of Alabama entwickelt worden war; das elektrische Modellflugzeug in Japan sowie das LightCraft-System von Myrabo im Jahr 2006; die Arbeiten von Taysir Nayfeh und seinem Team an der Cleveland State University 2008; sowie den Erfolg der Firma LaserMotive beim Power Beaming Wettbewerb Ende 2009 und ihre weiteren Fortschritte 2010 und 2012 (s.d.).
Als Fuller am Wyss Institute in Harvard ab 2009 – inspiriert von der Biologie einer Biene – seine erste fliegende Mini-Drohne entwickelte, die damals dementsprechend auch RoboBee genannt wurde, waren die geplanten Einsatzgebiete vielfältig. Sie sollte, wie Ihre Namensgeberin, Pflanzen in der Landwirtschaft bestäuben, aber auch Such- oder Rettungseinsätze, Überwachungen oder das Sammeln von Wetter-, Klima- und Umweltdaten durchführen. Die Entwicklungsgeschichte dieses Mikro-Flugroboters wurde ausführlich in der Jahresübersicht 2013 dargestellt.
Auch die neue RoboFly orientiert sich an ihrem realen Vorbild: Da Fliegen selbst feinste Gerüche wahrnehmen und wirklich gut darin sind, herumzufliegen und nach stinkenden Dingen zu suchen, sollen die RoboFlys in Zukunft im Schwarm dazu eingesetzt werden, z.B. Gaslecks in Gebäuden zu finden.
In der Luftfahrt haben sich zwar Rotorblätter bewährt, die von relativ einfachen Motoren bewegt werden können und keine komplizierte Koordination verschiedener Bewegungsabläufe erfordern wie Flügel. Für kleine Körper wie die von Insekten – oder insektenähnlichen Roboter – sind Rotoren aber zu groß, zu schwer und zu unhandlich. Viele Ingenieure, die kleine Drohnen entwickeln, orientieren sich deswegen am Design von fliegenden Insekten, deren Motto lauten könnte: „Lieber etwas mehr Gehirnmasse in die Koordination der Flügel stecken, als erheblich mehr Masse in die Betätigung eines Rotors.“
Auch für Fuller heißt das, daß sich die RoboFly mit einem Paar Flügel fortbewegt, zu deren Steuerung ein Mikrocontroller benutzt wird, der elektrische Impulse in einer Welle an die Flügel sendet, um sie zu bewegen – genau wie das Gehirn einer echten Fliege. Zu Beginn einer Welle bewegen sich die Flügel so nach vorne, am Ende der Welle wieder nach hinten.
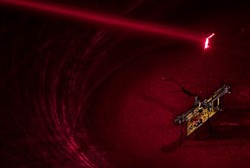
Das vorrangige Ziel der Entwicklung ist aber, die Mini-Drohne ohne Kabel fliegen und steuern zu können. Da eine Batterie zu schwer ist, wird an der RoboFly eine winzige PV-Zelle angebracht, die 7 V Spannung für die Flügel generiert, wenn man einen Laserstrahl dauerhaft darauf richtet. Der Mikrocontroller ist über einen Schaltkreis mit den Flügeln und der Photovoltaik-Zelle verbunden. Um die RoboFly flugfähig zu machen, erhöht ein Spannungswandler die 7 V auf die benötigten 240 V, mit denen die Flügel und der Mikrocontroller betrieben werden.
In ihrer jetzigen Form kann die Roboterfliege nur starten und landen, da alles andere ihre PV-Zelle aus der Ausrichtung mit dem Laser bewegt. Im Laufe der Zeit soll der Laser jedoch in der Lage sein, den Roboter während des Fluges zu verfolgen und ihn kontinuierlich mit Energie zu versorgen.
Bis es soweit ist, daß sie sinnvoll eingesetzt werden kann – egal ob als Gasdetektor oder als künstlicher Bestäuber –, müssen noch die Energieversorgung optimiert und die notwendigen Sensoren und Werkzeuge kleiner und leichter werden. Zudem ist denkbar, die Drohne in Zukunft mit Radiowellen oder winzigen Batterien zu betreiben.

Die berührungsfreie Lade-Technologie wird in diesem
Jahr aber auch noch von anderer Seite vorangebracht. Berichten vom September 2018 zufolge
wird die unbemannte, mit Solarstrom betriebene Starrflügeldrohne Silent
Falcon der Firma Silent Falcon UAS Technologies (SFUAS),
die in der Jahresübersicht 2012 ausführlich
beschrieben wurde, zwischenzeitlich von Wissenschaftler der Defense Advanced
Research Projects Agency (DARPA) weiterentwickelt, damit ein Laser am
Boden die Akkus im Flug laden kann.
Die mit Dünnschicht-Solarzellen und einer Lithium-Polymer-Batterie für die Nacht ausgestattete Drohne muß ab und zu landen, meist wetterbedingt. Zusätzliche Hochleistungs-Solarzellen am Bauch der Falcon sollen sie nun zum immer fliegenden Objekt machen, indem ein leistungsstarker Laser, der den Flugbewegungen der Drohne folgt, sichtbares Licht auf diese Zellen schießt, die das Licht wiederum in Strom zum Aufgeladen der Akkus umwandeln. So soll die Drohne aus einer Entfernung von etwa einem halben Kilometer drahtlos mit Energie versorgt werden.
Die damit denkbaren Missionen sind nicht unbedingt militärischer Art. Im Flug aufladbare Drohnen könnten auch bei groß angelegten Suchaktionen etwa nach Katastrophen an Land oder auf hoher See eingesetzt werden. Allerdings lauert da auch eine Gefahr: Wenn der Laser nicht die Solarzellen trifft, sondern die Drohne selbst, etwa bei Turbulenzen, kann er as Fluggerät oder zumindest dessen Sensoren Drohne ernsthaft beschädigen.
Die Entwickler des im US-Bundesstaat Maryland ansässigen Communications-Electronics Research, Development and Engineering Center der DARPA wollen Anfang kommenden Jahres einen Prototyp des Systems vorstellen. Der wird allerdings nur auf dem Boden eingesetzt. Ein funktionsfähiges System, das eine Drohne im Flug per Photovoltaik betreibt, soll dann 2020 einsatzbereit sein.
Interessanterweise folgt bereits im November 2018 ein
Pressebericht, dem zufolge möglicherweise eine der wichtigsten Herausforderungen
der Stromversorgung von Drohnen mit Lasern, nämlich sicherzustellen,
daß die Qualität des Laserstrahls und damit seine Fähigkeit, den Drohnen
konstantes und starkes Licht zu liefern, mit der Entfernung nicht abnimmt,
von Forschern der Firma LakeDiamond, einem Spin-off
der Eidgenössischen Technischen Hochschule Lausanne (EPFL), gelöst werden
konnte.
Der Firmengründer Pascal Gallo und sein Team haben künstliche Diamanten entwickelt, die es durch ein Laser-Netzwerk am Boden möglich machen, Drohnen über viel größere Entfernungen mit Strom zu versorgen. Der Grund für die Entwicklung war die Suche nach ultrareinen Steinen, mit denen die Energieübertragung in Lasersystemen verstärkt werden kann. Diamanten haben nämlich die außerordentliche Eigenschaft, optimale Wärmeleiter zu sein, weshalb sie Laserstrahlen erzeugen können, ohne zu überhitzen.

LakeDiamond
Die Geschichte reicht einige Jahre zurück. Nachdem der Physiker Gallo und Prof. Eli Kapon von der EPFL mit dem Einsatz von Diamanten in Lasersystemen den Weltrekord bei der Energieübertragung via Laser brechen konnten, patentierten sie ihre Entdeckung und beschlossen, ein Startup zu gründen, das mit Hilfe von Diamanten Laserstrahlen zur Stromversorgung von Drohnen aus der Ferne erzeugt.
Laser, die Diamanten in ihrem Hohlraum enthalten, können einen sehr intensiven, fast perfekten Lichtstrahl mit sehr geringer Abweichung erzeugen, der stärker ist als die der Sonne und bis zu tausendmal mehr Energie pro Quadratmeter übertragen kann. Gleichzeitig ist der Lichtstrahl für Menschen ungefährlich.
Da sie reinste Diamanten brauchen, um ihr Ziel zu erreichen, diese aber weder in der Natur noch auf dem Markt aus zuverlässigen Quellen zu beziehen sind, fassen sie den Entschluß, diese selbst zu produzieren. Nach fünf Jahren Forschungsarbeit, gefördert durch öffentliche Einrichtungen der Schweiz und anderer europäischer Länder, verfügen sie über ein tragfähiges Geschäftsmodell und können im Jahr 2015 die LakeDiamond gründen.
Die Firma stellt die Edelsteine mittels chemischer Gasphasenabscheidung in einer Vakuumkammer her, die für die Reinheit der Diamanten sorgt. Dabei wird ein kleines Diamantplättchen, das als Substrat dient, in einen speziell konzipierten Reaktor gelegt. Darauf lagern sich mit einer Geschwindigkeit von 10 μm pro Stunde Schichten von Kohlenstoffatomen als kristallines Muster ab. Nach fünf Tagen (100 Stunden) ist das Plättchen einen Millimeter gewachsen. Die Oberfläche wird dann so bearbeitet, daß darauf ein Spiegeleffekt erzeugt wird, der die Breite des Strahls bestimmt.
Das aktuelle Testsystem, das das Unternehmen entwickelt hat, verwendet einen 1,55 μm großen Laser, der 4 W liefert und kleine Drohnen von der Größe einer Handfläche betreiben kann. Eine fliegende Kamera könnte damit aus bis zu 10 m Entfernung für unbestimmte Zeiträume mit Energie versorgt werden. Der nächste Schritt besteht darin, professionelle Drohnen mit bis zu 100 W Leistung in bis zu 100 m Entfernung anzutreiben, was im Laufe der nächsten Jahren erreicht werden soll.
Zurzeit produziert LakeDiamond all seine Diamanten in nur zwei Prototyp-Reaktoren. Zur Steigerung der Produktionsmenge sollen nun Mittel in Höhe von 60 Milo. SF beschafft werden, um 50 Reaktoren für die industrielle Fertigung zu bauen. Im Januar 2019 wird ein globales Partnerschaftsabkommen über den Einsatz der Diamanten in Lasersystemen zur Energieverteilung mit TAQA unterzeichnet, einem in Abu Dhabi notierten internationalen Energieunternehmen.
Zudem wird bereits mit einem namhaften Hersteller an der Entwicklung eines Trackingsystems zusammengearbeitet, um die Drohnen zur Energieübertragung zu verfolgen. Um ein bißchen Geld zusätzlich zu verdienen, verkauft LakeDiamond die Edelsteine auch auf dem ganz normalen Diamantenmarkt, wo ein Ein-Karäter über 10.000 € einbringt.

(Grafik)
Hierzu paßt ein Design namens Vexil, das allerdings
schon vom Januar 2016 stammt und auf Charles
Bombardier sowie den mexikanischen Industriedesigner Sebastian
Campos Möller zurückgeht, die sich dabei von dem elektrischen
Hoverboard haben inspirieren lassen, mit dem Alexandru Duru zwei
Jahre zuvor einen Rekord aufgestellt hatte (s.u. 2015).
Da die Batteriekapazität eine große Hürde vor längeren Einsätzen bildet,
soll die Vexil eine andere Form der Stromzufuhr bekommen.
Den Designern zufolge soll die Solo-Flugplattform mit 3 – 6 elektrischen Gebläsen ausgestattet werden, um einen 80 kg schweren Fahrer in die Luft zu heben. Anstelle von Lithium-Ionen-Batterien würde sie Superkondensatoren besitzen, die eine Ladung fast zehnmal schneller annehmen und abgeben können und auch viel mehr Lade- und Entladezyklen vertragen als wiederaufladbare Batterien.
Das Aufladen der Superkondensatoren während des Fluges soll mit einem bodengestützten, auf einem kleinen Turm montierten Laser erfolgen, dessen Wirkungsradius 8 km betragen soll und der den Energiestrahl direkt und präzise auf einen unter der Vexil installierten Empfänger richtet, der den Lichtstrahl in Elektrizität umwandelt. Das Energiepaket wäre so ausgelegt, daß es genug Energie speichern kann, um 2 Minuten lang zu fliegen, einschließlich 30 Sekunden Reserveenergie.
Eingesetzt werden könnte die Vexil zur Erkundung, für Überwachungseinsätze, Such- und Rettungsflüge und sogar als umweltfreundliches Freizeitfahrzeug, mit dem z.B. Fallschirmspringer bis in eine Höhe von 9.000 Fuß aufsteigen, um dann von der Plattform abzuspringen.
Statt gebündelte Laser lieber den ,großen Strahler am Himmel’ zu nutzen,
um eine Drohne über viele Stunden lang mit Strom zu versorgen, ist
das Ziel eines Teams von Ingenieurstudenten der National University
of Singapore (NUS), die im August 2018 eine
hauptsächlich aus Kohlefaser gebaute Drohne vorstellen, die ihre Energie
direkt aus den Solarzellen an Bord bezieht und so lange in der Luft
bleiben kann, wie die Sonne scheint.

Quadrokopter
Der solarbetriebene Quadrokopter wiegt nur 2,6 kg und verfügt über keine Bordbatterie oder ein anderes Energiespeichersystem. Stattdessen ist er mit einer Anordnung von 148 Silizium-Solarzellen ausgestattet, was ihm eine Gesamtoberfläche von etwa 4 m2 verleiht.
Unter der Leitung von Prof. Aaron Danner haben seit 2012 acht aufeinanderfolgende Gruppen von Studenten an dem Projekt gearbeitet. Obwohl in der Vergangenheit schon einmal eine Drohne geflogen ist, die Solar- und Batterieenergie im Verhältnis 75 zu 25 % kombinierte, ist dies die erste Drohne der NUS, die ausschließlich auf direkte Sonnenenergie setzt.
Bislang wird die Solardrohne per Fernsteuerung bis zu einer Höhe von rund 10 m geflogen. Da sie mit einem GPS-System ausgestattet ist, könnte sie aber auch autonom fliegen. Das Team hofft, daß dieses Proof-of-Concept-Modell letztlich zu solarbetriebenen Quadrokoptern führen könnte, die als fliegende Solarpaneele an Katastrophenorten zur Stromversorgung dienen oder für Aufgaben wie Überwachung und Fotografie eingesetzt werden könnten.
Zur Erinnerung: Einer Gruppe von Master-Studenten der Queen Mary University of London war es bereits 2013 gelungen, einen solarbetriebenen, ferngesteuerten Solar-Copter zu konstruieren, der auch wirklich fliegt.
Doch auch bei der konventionellen Energieversorgung mittels Akkus geht
die technische Entwicklung voran, wie sich im Januar 2018 beweist,
als das Startup SolidEnergy Systems Corp. (SES) eine
Finanzierungsrunde C mit 34 Mio. $ abschließen kann. Während das Unternehmen
seine Investoren in dieser Runde nicht bekannt gegeben hat, gehören zu
den bestehenden Investoren Temasek, Applied Ventures, General Motors
und Vertex Ventures China.
Das 2012 von Qichao Hu gegründete und in Massachusetts beheimatete Startup, ein Spin-Out des MIT, hat damit bis heute 50 Mio. $ aufgebracht, was allerdings nicht viel Kapital ist, um eine neue Lithium-Metall-Batterie aus dem Labor in die Fabrik zu bringen, die nach eigenen Angaben eine doppelt so hohe Energiedichte hat wie die derzeitigen Lithium-Ionen-Batterien.
Für den Zielmarkt der Drohnenhersteller bedeutet das, daß eine Drohne mit einer einzigen Ladung weiter und länger fliegen, den Radius verdoppeln und die abgedeckte Fläche vervierfachen kann, wie Hu betont, der die Technologie ursprünglich am MIT im Labor des Batterieforschers Don Sadoway entwickelt hat.
Die Energiespeicher-Innovation von SolidEnergy ist in eine dünne Lithium-Metall-Folie als negative Elektrode verpackt, die das in Li-Ionen-Batterien üblicherweise verwendete Graphit ersetzt. Zudem verwenden die Batterien des Unternehmens auch ein halbfestes Material als Elektrolyten, das die entzündliche Flüssigkeit ersetzt, die normalerweise in Li-Ionen-Batterien verwendet wird. Der Durchbruch resultierte in einer Batterie mit einer Energiedichte von 450 Wh/kg.
Das Unternehmen verkauft bereits Batterien in geringen Mengen an Drohnenhersteller und Unternehmen, die drahtloses Internet in ländliche Gebiete bringen wollen, und die neuen Mittel sollen für die Verbesserung der Batterietechnologie und die Erweiterung der Produktion in dem Vorzeigewerk in Woburn, Massachusetts, genutzt werden. Irgendwann will man die Produktion allerdings nach Asien – entweder nach China oder nach Korea – verlagern.
Drohnen sind aber nur der erste Markt für die SolidEnergy, denn die Firma strebt auch den Bau von Batteriepaketen für ‚Wearables‘, wie z.B. intelligente Uhren, und schließlich für Elektrofahrzeuge an. Es wird geschätzt, daß die Wearable-Batterie 2019 und die EV-Batterie 2020 oder 2021 fertig sein wird.

Einen weiteren Schritt vorwärts geht es, als im September 2018 das
kalifornische Startup Impossible Aerospace erstmals
in der Öffentlichkeit erscheint. Das 2016 von Spencer
Gore gegründete Unternehmen, das betont, daß alle seine Produkte
in den USA entwickelt, montiert und gewartet werden, hat seinen Hauptsitz
in Santa Clara und wird seit jüngstem von Bessemer Venture Partners,
Airbus Ventures und Eclipse Ventures mit 9,4 Mio. $ finanziert.
Dieses Produkt ist in erster Linie die Drohne US-1, die pro Ladung sehr viel länger fliegen kann als die der Konkurrenz und schon fast mit brennstoffbetriebenen Systemen gleichziehen kann. Die Drohne ist laut Gore das erste Fluggerät, das von Grund auf darauf hin konstruiert wurde, elektrisch zu liegen: „Es handelt sich weniger um ein Flugzeug als vielmehr um eine fliegende Batterie, die eine Energiequelle nutzt, die gleichzeitig die Primärstruktur bildet.“

(Grafik)
Die Idee für die grundlegende Neugestaltung, wie Drohnen gebaut werden, wurde durch Gores Zeit bei Tesla inspiriert, wo er jahrelang am Batteriedesign für Autos wie das Modell X und das Modell 3 gearbeitet hat.
Mit 1,2 kWh Li-Ionen-Zellen, die in der gesamten Struktur des x-förmigen Körpers verbaut sind, bildet die 660 x 660 mm große US-1 tatsächlich einen fliegenden Akku, der mit 7,1 kg zwar etwas schwer ist, aber trotzdem noch eine Nutzlast von bis zu 1,3 kg tragen kann. Mit dieser kann eine Flugzeit von bis zu 78 Minuten erwartet werden. Wird keine Nutzlast mitgeführt, sind sogar bis zu 120 Minuten möglich. Die Höchstgeschwindigkeit beträgt etwa 76 km/h, die Reichweite fast 80 km.
Mit einem optionalen Schnelladegerät können die Zellen – statt wie normal in etwa 2,5 Stunden geladen zu werden – in 45 Minuten auf 85 % Kapazität gebracht werden. Die US-1 ist IP43-geschützt und kann bei Temperaturen von 0° – 50°C betrieben werden. Sie wird in einem Hartschalengehäuse und einer 16-Kanal-Fernbedienung mit einem LCD-Panel geliefert, das die Echtzeit-Flugdaten anzeigt.
Eine Basisversion der Drohne wird 7.500 $ kosten, während ein Modell, das für den Einsatz mit Wärmebildkameras ausgelegt ist, 9.500 $ kostet.
Für Gore ist die US-1 mehr als nur ein Produkt, sie ist auch ein Konzeptbeweis für eine neue Art des Flugzeugdesigns. Letztendlich soll Impossible Aerospace in ein Unternehmen verwandelt werden, das elektrische Flugzeuge herstellt, die in der Lage sind, Passagiere zu befördern. Die Firma hat bereits damit begonnen, ihre Langstreckendrohne an Feuerwehr, Polizei sowie Such- und Rettungsteams in den gesamten USA zu verkaufen, wird das System ab dem 4. Quartal jedoch auch allgemein verfügbar machen.

Unter dem Titel ‚Forceful manipulation with micro air vehicles‘ erscheint
im Oktober 2018 ein im Netz einsehbarer Bericht von
Forschern der Stanford University in den USA (Mark
Cutkosky) und der École polytechnique fédérale de
Lausanne (EPFL) in der Schweiz (Dario Floreano),
in dem sie über die Entwicklung und den Einsatz von FlyCroTug-Drohnen
berichten, die in der Lage sind, gemeinsam schwere Objekte zu manipulieren.
Zwei der kleinen Drohnen können beispielsweise eine Türklinke betätigen, indem die eine eine Schlinge um die Klinke legt und den Draht mit einer kleinen Winde aufrollt, die zweite an der Tür zieht, so daß sich diese öffnet. Die Drohnen können zudem überall landen, selbst auf einem senkrechten Türblatt, und daran hochklettern, da sie mit Haftsystemen nach dem Vorbild von Gecko-Füßen ausgestattet sind. Den Haftmechanismus können die Drohnen aber auch nutzen, um um Lasten anzuheben, die bis zu 40 mal schwerer sind als sie selbst.
Weil die FlyCroTug mit einem Durchmesser von etwa 10 cm recht klein ist, läßt sie sich auch in schwierigem Umfeld leicht navigieren – und kann trotzdem Kameras transportieren, um etwa ein Katastrophengebiet zu erkunden, bzw. Wasserflaschen, Verbandsmaterial oder Medikamente zu Verunglückten bringen, die nicht sofort geborgen werden können.
Als natürliches Vorbild der kleinen viermotorigen Drohnen dienten Cutkosky die kräftigen, schnellen und wendigen Wespen, die Futter, das zu schwer ist, um es fliegend zu transportieren, wegziehen. Damit sich die FlyCroTug auch auf weichem Untergrund halten und bewegen kann, läßt sich das ‚Fahrwerk‘ wahlweise mit 32 kleinen Dornen ausstatten, die Angelhaken ähneln. Damit krallt sich die Drohne fest, an die sich alternativ aber auch Räder montieren lassen.
Sehr interessant finde ich, daß im November 2018 erstmals
sogar in den Mainstream-Medien über die „völlig neue“ Technologie
berichtet wird, ein Flugzeug mittels Ionenantrieb zum
Fliegen zu bringen. Dabei wird dieses Thema im Umfeld der neuen Energien
schon seit den 1960er Jahren unter dem Stichwort Lifter theoretisch
und praktisch untersucht, weshalb hier ein externer Link auf die Seite
von J.
L. Naudin eingefügt ist, die als Einsteig sehr empfehlenswert ist.
(Grafik)
Ein Lifter oder Ionenantrieb-Flugzeug (z.T. auch Heber oder Hexalifter genannt) verwendet elektrohydrodynamische (EHD) Phänomene, um ohne bewegliche Teile in der Luft Schub zu erzeugen. Der dieser Technik zugrunde liegende elektroaerodynamische Schub (auch: Ionen- oder Elektrischer Wind bzw. Koronaentladung) war im übrigen bereits 1709 von dem englischen Wissenschaftler Francis Hawksbee entdeckt worden.
In den 1950er und 1960er untersucht der amerikanische Flugzeugkonstrukteur russischer Herkunft Alexander Prokofieff de Seversky den Einsatz des EHD-Antriebs und meldet 1959 ein Patent für ein Ionocraft an (US-Nr. 3.130.945, erteilt 1964). Er baut und fliegt sogar ein metergroßes VTOL-Ionenflugzeug – allerdings mit externer Stromversorgung –, das seitwärts manövrieren kann, indem die in verschiedenen Bereichen angelegten Spannungen variiert werden. Es wird im August 1964 sowohl im US-Magazin Popular Mechanics als auch im Fernsehen präsentiert.

von Krauss
Das erste ionengetriebene Fluggerät, das mit einer eigenen Bordstromversorgung fliegt, ist ein von Ethan Daniel Krauss und seiner Firma Electron Air LLC im Jahr 2006 entwickeltes VTOL-Flugzeug, dessen Patentanmeldung 2015 eingereicht wird (US-Nr. 10.119.527, erteilt 2018). Das Flugzeug entwickelt genug Schub, um schnell zu steigen oder mehrere Minuten lang horizontal zu fliegen.
Weitere bereits beschriebene Umsetzungen sind der b-IONIC Airfish genannten Flugkörper der Firma Festo AG & Co. KG im Jahr 2006, dessen Antrieb mit luftionisierenden hohen Gleichspannungsfeldern arbeitet, sowie das von dem Plasmaphysiker Prof. Subrata Roy erfundene Wingless Electromagnetic Air Vehicle (WEAV), das in der Übersicht von 2008 präsentiert wird (s.d.)
Im aktuellen Fall sind es Wissenschaftler des Massachusetts Institute of Technology (MIT) um den von Star Trek inspirierten Prof. Steven R. H. Barrett, die nach einer fünfjährigen Forschungszeit ein nahezu lautloses Flugmodell, das einem großen, leichten Segelflugzeug ähnelt, per Ionenantrieb durch die Sporthalle der Universität schweben lassen und darüber im Wissenschaftsmagazin Nature berichten.

(Grafik)
Der bisherige Rekordflug des Fliegers mit einer Spannweite von 5 m, der mit eingebautem Lithium-Polymer-Batteriepack und Hochspannungstransformator nur 2,45 kg wiegt, endet allerdings zwangsweise nach rund 60 m, kurz vor dem Ende des Gebäudes. Was immerhin schon mehr ist als die 37 m des ersten Fluges der Gebrüder Wright.
Möglich wird diese Art der Fortbewegung durch den künstlich produzierten Ionenwind, der entsteht, wenn am Rumpf und an den Flügeln des Flugzeugs unterschiedliche Ladungen existieren. Dadurch wird ein elektrisches Feld generiert und Ionen wandern von der negativen zur positiven Ladung. Weil sie auf dem Weg auch Luftmoleküle mit sich ziehen, entsteht der Ionenwind, der für den nötigen Auftrieb des Flugzeugs sorgen kann. Das elektrische Feld kann aber nur erzeugt werden, indem die Startrampe mit einer Energiequelle verbunden wird.

des MIT
Der erste erfolgreiche Prototyp mit dem pragmatischen Namen EAD Airframe Version 2 (oder V2) verwendet eine Reihe dünner Drähte, die wie ein horizontaler Zaun entlang und unter dem vorderen Ende des Flugzeugflügels gespannt sind und – von dem Batteriepack gespeist – 600 W Strom bei 40.000 V führen. Der Strom gibt den Luftmolekülen in der Nähe der Drähte eine positive Ladung, die dann rückwärts zu ähnlich angeordneten dickeren Drähten, die am hinteren Ende des Flugzeugflügels entlanglaufen, fließen und dabei Energie an neutrale Luftmoleküle übertragen. Wenn die neutralen Moleküle vom Flügel zurückströmen, erzeugen sie einen Schub, der dem eines herkömmlichen Düsentriebwerks entspricht.
Obwohl die MIT-Forscher ihr Projekt noch als reine Grundlagenforschung sehen, sind sie zuversichtlich, die Technologie langfristig auch bei autonomen Flugeinheiten zum Einsatz bringen zu können – etwa in Form von Hybridversionen, bei denen sich verschiedene Antriebsvarianten ergänzen. Zunächst einmal soll die Technik aber für leisere Drohnen sorgen: Weil für die Nutzung des Ionenwinds keine beweglichen Teile benötigt werden, entfällt auch das charakteristische Pfeifen der Rotoren, was nicht nur bei Spionage-Drohnen von Vorteil wäre.
Barretts Team arbeitet nun daran, die Effizienz des Designs zu erhöhen, um mit weniger Spannung mehr Ionenwind zu erzeugen. Die Forscher hoffen auch, die Schubdichte des Designs zu erhöhen, d.h. die Menge des pro Flächeneinheit erzeugten Schubs. Derzeit erfordert das Fliegen des Leichtflugzeugs eine große Fläche von Elektroden, die im Wesentlichen das Antriebssystem des Flugzeugs ausmachen. Im Idealfall soll ein Flugzeug ohne sichtbares Antriebssystem oder separate Steuerflächen wie Seiten- und Höhenruder entstehen.
Bislang hat das Team noch keine weiteren Erfolge gemeldet, dafür wird es uns in der Jahresübersicht 2023 wieder begegnen - mit einer neuen, besonders leisen Propellerkonstruktion.
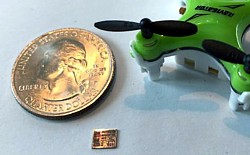
Im diesem Zusammenhang soll darauf verwiesen werden, daß auch ein
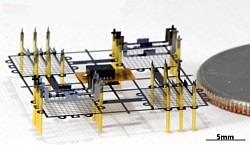
2 x 2 cm großer Flugroboter, der zu den kleinsten der Welt gehört, mit elektrohydrodynamischen (EHD)
Triebwerken fliegt. Wie im Februar 2019 berichtet wird,
wiegt das von Forschern der University of California at Berkeley (UC
Berkely) entwickelte Ionocraft lediglich 30 mg und transportiert eine
37 mg schwere Inertial Measurement Unit (IMU).
der UC Berkely
Diese Drohne, die Daniel S. Drew und seine Mitforscher bereits im vergangenen Oktober auf der International Conference on Intelligent Robots and Systems (IROS 2018) in Madrid präsentierten, hebt mit Hilfe von vier EHD-Triebwerken ab, die in einem elektrischen Feld Luftmoleküle (überwiegend Stickstoff) ionisieren und beschleunigen. Dabei kollidieren die Ionen mit neutralen Molekülen und erzeugen so den Gesamtschub, ein Phänomen, das auch als Biefeld-Brown-Effekt bekannt ist.
Da die vier Triebwerke ähnlich angeordnet sind wie die Rotoren bei einem Quadrokopter, läßt sich das Ionocraft auch auf ähnliche Weise steuern. Allerdings müssen Energiezufuhr (2 kV, 0,35 mA) und Datenkommunikation derzeit noch über Kabel erfolgen. Gleichwohl halten es die Forscher zukünftig für machbar, voll autonome Roboter auf diese Weise auch im Freien fliegen zu lassen.
Wie die Wissenschaftler in ihrer im Netz einsehbaren Veröffentlichung schreiben (‚Towards Controlled Flight of the Ionocraft: A Flying Microrobot Using Electrohydrodynamic Thrust With Onboard Sensing and No Moving Parts‘), wurde bislang versucht, den EHD-Antrieb für größere Fluggeräte bis hin zum bemannten Flug zu optimieren, während seine eigentliche Stärke in der Miniaturisierung liegt: je kleiner die Plattform, desto besser das Verhältnis von Schub zu Masse.
Drew zufolge sollte es zukünftig möglich sein, EHD-Triebwerke in der Größenordnung von Millimetern zu bauen, die mit weniger als hundert Volt arbeiten. Damit werden Flugroboter in der Größe von Insekten möglich, um mit verteilten Sensoren die Luftqualität zu messen bzw. in der Präzisionslandwirtschaft oder bei Rettungseinsätzen genutzt zu werden. Und da die Silizium-Elektroden des Ionocraft mindestens den Temperaturen auf der Venus standhalten können, ist die Technologie auch für die Erkundung von Planeten mit Atmosphären interessant.

(Grafik)
Um im Kontext zu bleiben: Im November 2020 behauptet
die von dem Luft- und Raumfahrttechnik-Ingenieur Tomas Pribanic gegründete
Firma Undefined Technologies mit Sitz in Doral, Florida,
daß sie mit ihrer zum Patent angemeldeten Air Tantrum-Technologie die
Schubkraft von Ionenantriebssystemen auf ein „noch nie dagewesenes
Niveau“ steigern konnte, was sehr leise Drohnen ohne bewegliche
Teile im Antriebssystem ermöglicht.
Auch die Website und Präsentation des Unternehmens konzentriert sich auf die Vorteile des leisen Fluges mit einem Geräuschpegel von weniger als 70 Dezibel (dB), der besser ist als das lästige Summen und Surren von Drohnenpropellern.

Die Transportdrohne mit Ionenantrieb, die den städtischen Frachttransport revolutionieren soll, wird in Zusammenarbeit mit der University of Miami entwickelt und soll im Vergleich zu den bisherigen Ionen-Antrieben den dreifachen Schub entwickeln.
Im März 2021 wird berichtet, daß die National Science Foundation (NSF) die Technologie bewertet hat und sich derzeit in der Endphase der Prüfung für eine zusätzliche Finanzierung befindet. Im April wird dann der erste erfolgreiche Indoor-Flug eines knapp 0,5 m2 großen Prototypen bekanntgegeben, der 20 Sekunden (andere Quellen: etwa 25 Sekunden) dauert und rund 90 dB laut ist. Das in einem Video vom Mai gezeigte quadratische Modell sieht aus wie ein etwas wackelig fliegender Stapel Paletten.

Belastbare Informationen über Schubkraft, Gewicht, Energieverbrauch, Tragfähigkeit, Haltbarkeit, Reaktionsfähigkeit und Giersteuerung werden nicht mitgeteilt, und auch ein angekündigter Outdoor-Test im Amelia Earhart Park fand bislang noch nicht statt.
Im Juni wird dafür eine Seed-Finanzierungsrunde in Höhe von knapp 2 Mio. $ abgeschlossen, geleitet von Dresden Capital Partners Fund Ltd. und mit Beteiligung von Rio Vista Advisors Inc., Thunder Road Properties L.P. und Biscayne Bay Advisors LLC.

Im Mai 2022 präsentiert die Undefined Technologies die nächste Generation seiner ‚leisen‘ kommerziellen Drohne, die mit einem Ionenantrieb anstelle von Propellern arbeitet – den Kommentaren zufolge aber immer noch recht laut ist. Nähere Details zu der Air Tantrum-Technologie hatten aber weder ein Flugvideo vom Dezember 2021 und die Präsentation von Pribanic auf der Logistikkonferenz The Future of Logistics in Las Vegas im Januar diesen Jahres enthüllt.
Das neue Design mit der umlaufenden Abdeckung, das nun den Namen Silent Ventus trägt, ist zwar ein optischer Fortschritt gegenüber früheren Versuchen, aber darunter sieht das Fluggerät mit seinen großen Elektrodengittern immer noch aus wie ein fliegendes Geschirrgestell.

(Grafik)
Der neue Prototyp ist dem Unternehmen zufolge etwa zweieinhalb Minuten geflogen und habe 85 dB erreicht. Die Schubkraft soll im Vergleich zu anderen Ionentriebwerkstechnologien um bis zu 150 % höher liegen.
Ein weiteres Video von Flugtests im Freien wird im September veröffentlicht. Diesmal soll sich die Ionen-Drohne nicht nur für viereinhalb Minuten in der Luft gehalten haben, sondern es sind auch einfache Flugmanöver zu sehen. Dabei liegt die Lärmbelastung während des Fluges bei unter 75 dB.
Das Unternehmen ruft nun zu weiteren Investitionen in ein Frachtdrohnen-Produkt auf, das bis Ende 2023 für mindestens 15 Minuten lang fliegen und dabei weniger als 70 dB erzeugen soll.
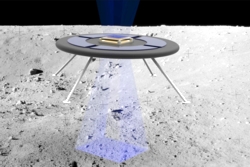
Ebenfalls im März 2021 erscheint eine Studie des MIT über
die Entwicklung einer unbemannten ‚fliegenden Untertasse‘, die zur Erkundung
des Mondes eingesetzt werden soll, indem sie durch die Kraft der elektrostatischen
Abstoßung über der Mondoberfläche schwebt (‚Electrostatic Levitation
on Atmosphere-Less Planetary Bodies with Ionic-Liquid Ion Sources‘).
Dies funktioniert, da der Mond keine schützende Atmosphäre besitzt und seine Oberfläche direkt dem Weltraumplasma und den ultravioletten Strahlen der Sonne ausgesetzt ist. Dadurch wird die Oberfläche positiv aufgeladen, so daß Mondstaub bis zu einem Meter über dem Boden schwebt – derselbe Effekt, der bei statischer Aufladung unser Haar zum Aufrichten bringt.
(Grafik)
Forscher hatten schon früher vorgeschlagen, dieses Phänomen für einen Raumgleiter zu nutzen, der die Oberfläche von luftlosen Himmelsobjekten wie dem Mond erkunden soll. Wenn die Flügel aus einem positiv geladenen Material wie Mylar bestehen würden, so die Überlegung, würde sich der Gleiter und die positiv geladene Mondoberfläche gegenseitig abstoßen, wodurch der Gleiter in die Schwebe käme. Dem MIT zufolge könnte ein solcher Aufbau zwar auf kleinen Asteroiden funktionieren, auf größeren Himmelskörpern wie dem Mond würde die Schwerkraft das Gerät aber nach unten ziehen.
Der neue untertassenähnliche Rover würde hingegen die Kraft der elektrostatischen Abstoßung verstärken, indem er Strahlen negativ geladener Ionen nach außen aussendet, wodurch der Rover selbst positiv aufgeladen würde, und positiv geladene Ionen nach unten auf die Mondoberfläche abgibt, wodurch die vorhandene positive Ladung verstärkt würde. Diese Ionen würden durch die Düsen nach oben und unten gerichteter Miniatur-Ionentriebwerke abgegeben, die eine Spannung an eine ionische Flüssigkeit (geschmolzenes Salz) anlegen, welche aus einem Reservoir an Bord entnommen wird.
Bei einem Funktionsnachweis durch das Team um Prof. Paulo Lozano wird ein handflächengroßes, 60 g schweres Rover-Modell in einer Vakuumkammer an Federn über einer Aluminiumoberfläche aufgehängt, um die luftlose Oberfläche des Mondes mit geringer Schwerkraft zu simulieren. Das Modell ist mit einem nach oben gerichteten und vier nach unten gerichteten Ionentriebwerken ausgestattet. Mit einem horizontalen Wolframstab über dem Rover wird gemessen, wie viel Kraft die Triebwerke erzeugten.
Bei Experimenten mit verschiedenen Spannungen wird festgestellt, daß eine relativ kleine Energiequelle erforderlich wäre, um einen rund 900 g schweren Rover etwa 1 cm über der Mondoberfläche schweben zu lassen. Das Schweben eines größeren Fahrzeugs in größerer Höhe würde natürlich mehr Energie erfordern, obwohl weitere Forschungen durchgeführt werden müssen, um festzustellen, wie gut die Kraft der elektrostatischen Abstoßung in größeren Höhen überhaupt funktionieren würde.
Über den Einsatz konventioneller Ionentriebwerke in
der Weltraumtechnik berichte ich ausführlich im Kapitelteil Alternative
Antriebe in der Raumfahrt.
Periphere Information: Im November 2020 berichten Prof. Thijs Defraeye und sein Team an der Eidgenössischen Materialprüfungs- und Forschungsanstalt (Empa) darüber, daß sie ein energieeffizientes, schnelles und schonendes Trocknungsverfahren für Lebensmittel mittels Ionenwind entwickelt haben, das sich auch für die Industrieanwendung eignet (nur für den Fall, daß das mit der Fliegerei nicht klappen sollte...).
In diesem Kontext ist auch zu erwähnen, daß Ingenieure der Ohio State University um John LaRocco im Dezember 2024 in ihrer im Netz einsehbaren Publikation ,Firefighting with Conductive Aerosol-Assisted Vortex Rings’ einen neuartigen Feuerlöscher vorstellen, der Brände statt mit Wasser oder Schaum mit ionischem Wind und Wirbelringen löscht.
Das Gerät schießt zunächst einen Luftwirbelring aus, der einen turbulenten Luftstrom erzeugt, der Hitze und Brennstoff voneinander trennt. Gleichzeitig transportiert dieser Wirbel leitfähige Aerosolpartikel, die die Luft ionisieren und noch mehr Turbulenzen erzeugen. Es gibt zwei Prototypen des Geräts: einen, der die Wirbel mit Druckluftstößen durch eine kegelförmige Mündung erzeugt, während der andere Luft durch eine quadratische Mündung mit einer elastischen Membran auf der Rückseite abfeuert, die man zurückzieht und und die dann wie ein großes Gummiband zurückschnappt.
Beide Prototypen des Vortex Launcher genannten Geräts löschen erfolgreich und beständig Flammen in einer Entfernung von bis zu 2 m, doch die Druckluftversion ist effizienter, und interessanterweise scheinen die Wirbelringe allein die Aufgabe zu erfüllen, denn es werden keine wesentlichen Verbesserungen festgestellt, wenn die leitfähigen Aerosole zugesetzt werden.

Lüftermodul
(Grafik)
Und noch eine Umsetzung sollte hier erwähnt werden: Auf der CES im Januar 2025 wird der Prototyp eines lautlosen Lüftermoduls gezeigt, das bis zu 25 W Wärmeleistung abführen soll. Hierzu erzeugen die ICE9 genannten Module des Start-Ups Ventiva aus dem Silicon Valley einen Ionenwind. An mehreren positiv geladenen Drähten (Anode) werden die Bestandteile der Luft ionisiert und die Ionen anschließend in Richtung eines negativ geladenen Gitters (Kathode) beschleunigt.
Ausreichend beschleunigt, fliegt der Großteil der Ionen am Gitter vorbei, wodurch ein Sog entsteht. Die Module sind in ein Gehäuse integriert, das unter anderem die Entstehung größerer Mengen Ozon verhindern soll. Ein einzelnes ICE9-Modul erreicht eine Kühlleistung von 12 W, durch die Kombination mehrerer Module oder in Hybridsystemen mit einem klassischen Lüfter sollen aktuell bis zu 30 W, und bis 2027 sogar 40 W möglich sein.
Weitere relevante technische Entwicklungen für Drohnen sind im
März 2018 ein kostengünstiges, 3D-gedrucktes Hyperspektralabbildungsgerät,
das leicht genug ist, um für die dronenbasierte Land- und Ozeankartierung
nützlich zu sein. Herkömmliche Geräte kosten Zehntausende von Dollar
und sind sehr sperrig und schwer, weshalb zur Kartierung großer Geländebereiche
bislang meist ein Flugzeug oder Hubschrauber angemietet werden muß.

Hyperspektral-Imager
Die Anleitung für die Erstellung der neuen Bildsensoren, in der die Forscher um Fred Sigernes vom norwegischen Universitätszentrum in Svalbard (UNIS) beschreiben, wie man Hyperspektral-Imager für nur 700 $ herstellen kann, die weniger als ein halbes Pfund wiegen, wird in der Zeitschrift Optics Express der Optical Society (OSA) allgemein zugänglich gemacht. Durch die Senkung der Kosten dieser Instrumente hoffen die Wissenschaftler, daß mehr Menschen in der Lage sein werden, diese Analysetechnik zu nutzen und weiterzuentwickeln.
Der von den Forschern entwickelte Hyperspektralabtaster verwendet die so genannte Push-Broom-Technik, bei der durch präzise Linienabtastung ein Spektralbild aufgebaut wird. Damit die Bewegung der Drohne das Bild während der Erzeugung nicht verzerrt, wird dem Aufbau ein sehr preiswertes, auf Gyroskopen basierendes, elektronisches Stabilisierungssysteme hinzugefügt.
Obwohl die neuen Imager nicht die Empfindlichkeit traditioneller Hyperspektral-Imager bieten, ist ihre Leistung ausreichend, um Gelände zu kartieren oder Ozeanfarben bei Tageslicht zu erkennen. Die Forscher arbeiten nun daran, die Empfindlichkeit zu verbessern, indem sie etwas größere Versionen der Instrumente herstellen, die aber immer noch klein und leicht genug für den Einsatz auf Drohnen sind.
(Montage)
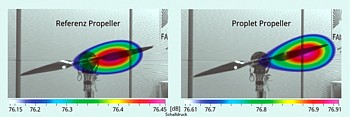
Die Wissenschaftler Sven Angermann und Konrad
Oeckel vom Fachgebiet Luftfahrttechnik der Technischen
Hochschule Wildau haben einem Bericht vom März 2018 zufolge
in Zusammenarbeit mit dem Technologieunternehmen gfai tech GmbH in
Berlin-Adlershof eine Technologie entwickelt, die als ein Durchbruch
in der Lärmanalyse von Drohnenpropellern betrachtet
wird.
Ziel des innovativen Meßverfahrens unter Nutzung einer ‚Akustischen Kamera‘ ist es, durch die Visualisierung Potentiale zur Lärmminderung zu ermitteln, konstruktive Mängel an den Propellern festzustellen und aerodynamische Probleme zu entschlüsseln. Untersucht wird z.B. der Einfluß von Winglets auf den Propellerlärm.
Um die verschiedenen Ansätze zur Lärmminderung von Propellern schnell und präzise zu analysieren, wird eine akustische Kamera mit 32 ringförmig angeordneten Meßmikrofonen genutzt, wobei sich die Schallquellen der schnell rotierenden Objekte sowohl zeit- als auch frequenzselektiv durch die Anwendung eines neuartigen, von der gfai tech entwickelten Rotationsfilters darstellen lassen.

Im April 2018 folgen Meldungen über ein tragbares
Exoskelett, das am Embedded Systems Laboratory der École
polytechnique fédérale de Lausanne (EPFL) zur Steuerung einer
Starrflügeldrohne entwickelt wird. Das Gerät mit dem Namen FlyJacket soll
Anfängern helfen, eine Drohne zu steuern, indem sie intuitive Oberkörpergesten
machen und ihre Arme buchstäblich wie Flügel weit ausbreiten. In Verbindung
mit einem Headset soll das Steuersystem dem Piloten ein natürliches Fluggefühl
vermitteln und gleichzeitig eine bessere Kontrolle des Fluges ermöglichen.
Das weiche Exoskelett enthält Bewegungssensoren, um die Bewegungen des Piloten zu verfolgen, sowie eingebaute Armstützen, um ein Ermüden der Arme zu verhindern. Der Pilot trägt ein Virtual-Reality-Headset oder ein anderes am Kopf befestigtes Display, damit er sieht, was die Drohne mit ihrer nach vorne gerichteten Kamera im Blick hat. Damit die FlyJacket gut funktioniert, muß die Drohne allerdings mit konstanter Geschwindigkeit fliegen.
Die ganze System paßt in einen Rucksack, so daß es im Einsatz leicht zu verwenden ist. Das Gerät hält dem Piloten die Hände frei, so daß dieser mit einem Handgerät z.B. interessante Punkte markieren kann, die er während des Fluges entdeckt, was bei Rettungseinsätzen oder Inspektionen sehr sinnvoll sein kann. Die Forscher wollen als nächstes die Größe und das Gewicht reduzieren und ein Design zu entwickeln, das ein leichteres An- und Ablegen des Exoskeletts ermöglicht.
Nur 20 mm2 groß ist ein neuer Prozessor, den ein Team um die
Professoren Vivienne Sze und Sertac Karaman vom Massachusetts
Institute of Technology (MIT) im Juni vorstellen. Der Navion genannte
Winzling soll Drohnen das Navigieren ermöglichen, die kaum größer sind
als Bienen.
Bei dem völlig neuen Design des Chips wurde neben Größe und Energieverbrauch ein besonderer Schwerpunkt auf das Tempo der Datenverarbeitung gelegt. Mit den 24 mW, die der Prozessor benötigt, verbraucht er ein Hundertstel dessen, was die kleinste LED-Birne beansprucht. Dafür kann er bis zu 171 Bilder pro Sekunde verarbeiten, was eine weitaus höhere Bildfrequenz ist als HDTV. Gleichzeitig wertet der Chip die Daten eines Trägheitssensors aus, da für eine präzise Navigation beides wichtig ist.
Karaman kann sich vorstellen, daß der Navion zukünftig auch in Wetterballons eingesetzt wird, die monatelang mit einer Batterieladung auskommen müssen. Der Chip soll jetzt auf einer handelsüblichen Drohne getestet werden, ehe sich die Forscher daranmachen, ‚künstliche Bienen‘ zu entwickeln, wie es in der Pressemeldung heißt – deren Autoren anscheinenden keine Ahnung von dem bereits erreichten Stand der Technik haben: Stichwort RoboBee (s.u. 2013).
Relevanz für zukünftige Mikrodrohnen wird möglicherweise auch eine im
Oktober 2018 veröffentlichte Untersuchung von Forschern
der Universität Edinburgh haben.

Wirbelring
Diese hatten wissen wollen, wie Löwenzahnsamen vom Wind getragen Entfernungen von mehr als einem Kilometer zurücklegen können – auch wenn sie normalerweise innerhalb von 2 m von der Blüte entfernt landen. Die Samen anderer Blüten der Asteraceae, zu denen auch Gänseblümchen und Sonnenblumen gehören, können sich sogar über mehr als 150 km ausbreiten.
Um die Samen zu studieren, baut das Team einen vertikalen Windkanal, der so gestaltet ist, daß der Samen in einer konstanten Höhe schwebt. Mit einer Mischung aus Langzeitbelichtungs- und Hochgeschwindigkeitsfotografie gelingt es, die Luftströmung durch und um den haarigen Flugschirm (Pappus) zu analysieren. Um die Morphologie der Samen selbst zu untersuchen, werden zudem Röntgenaufnahmen und Mikroskope eingesetzt.
Dabei wird entdeckt, daß die Form des Löwenzahnsamens bei der Wahrung der Höhe viermal effizienter ist als ein von Menschenhand gefertigter Fallschirm, was einer bemerkenswerten, in der Natur noch nie so beobachteten Form des Fluges zu verdanken ist. Diese wird durch einen sogenannten getrennten Wirbelring erreicht, bei dem die Samenborsten ringförmige Luftblasen erzeugen, die sich vertikal über dem Pappus bilden, den Luftwiderstand erhöhen und damit den Abstieg verlangsamen.
Bemerkenswert ist, daß die Luftblase stabiler wird, wenn Luft durch sie hindurchströmt. Diese Strömung wird durch den besonderen Abstand der Borsten des Samens reguliert. Vielleicht ist es daher die relativ hohe Porosität des Pappus, die dazu beiträgt, seinen Flug stabil zu halten. Die Forscher spekulieren jedenfalls, daß diese Form des Reisens die Konstruktion winziger Flugdrohnen beeinflussen könnte, die beispielsweise die Luftverschmutzung überwachen könnten und dabei keine Stromversorgung benötigen.
Im November 2018 startet das bis zum April 2024 laufende
Projekt GRIFFIN (‚General compliant aerial Robotic manipulation
system Integrating Fixed and Flapping wings to INcrease range and safety‘),
das von der Europäischen Kommission mit 2,5 Mio. € gefördert wird. Es
zielt darauf ab, Prototypen von Robotervögeln zu entwickeln, die im Flug
Energie sparen, auf gekrümmten Oberflächen hocken und mit ihren Gliedmaßen
und künstlichen Schnäbeln Aufgaben erledigen können.

Das Projektteam um Prof. Anibal Ollero an der Universität Sevilla in Spanien kann Mitte 2021 Roboterdrohnen vorweisen, die die Flugzeit von Standarddrohnen, die 20 – 30 Minuten beträgt, verdoppeln können. Ihre schlagenden Flügel sind so konzipiert, daß sie durch Gleiten und andere Reaktionen auf Windströmungen die Batterie schonen. Das Fehlen von Rotoren reduziert zudem den Lärm, den die Robotervögel beim Fliegen verursachen, und ermöglicht Aufgaben wie die Landung auf verletzten Menschen zur Aufnahme biometrischer Daten.
Bei Flügeltests im Innen- und Außenbereich erweisen sich die Fluggeräte als erfolgreich, ebenso bei Landungen auf Oberflächen mit einer Breite von 18 – 25 cm. Zudem zeigt eine Simulation, daß sie sich auf gekrümmten Objekten niederlassen und mit ihren Krallen senkrechte Stangen greifen können.
Die nächste Herausforderung ist der Einsatz des maschinellen Lernens und anderer KI-Technologien an Bord, um eine automatische Reaktion auf wechselnde äußere Faktoren wie Windströmungen oder unebene Oberflächen zu ermöglichen. Das Team hofft, daß die Ornithopter im Jahr 2030 den Himmel erobern, praktische Aufgaben erfüllen und bei Notfalleinsätzen helfen.
Im November 2018 berichten die Fachblogs erstmals über
den patentierten FT
Aviator, einen revolutionären Einhand-Drohnen-Controller, der
das geistige Kind von Scott Parazynski ist, einem ehemaligen
NASA-Astronauten, und nun auf Kickstarter zu Preisen ab 225 $ angeboten
wird, was der Hälfte des erwarteten Verkaufspreises bei der Markteinführung
entspricht.

Bislang steuern Drohnenpiloten ihre Fluggeräte mit Hilfe von Controllern im Stil von Videospielen oder einfach mit virtuellen Daumenpads und Tasten auf einem Telefonbildschirm. Andererseits werden Hubschrauber und Flugzeuge schon lange mit Joystick-ähnlichen Controllern gesteuert, weshalb es im Nachhinein doch etwas wundert, wieso nicht auch Drohnen so gesteuert werden.
Der von Fluidity Technologies Inc. neuentwickelte FT Aviator ist so konzipiert, daß er den fortschrittlichen Joystick-Steuerungen ähnelt, aber gleichzeitig für Amateurpiloten intuitiver zu bedienen ist. Er besteht aus einem 7-Zoll-Joystick, der auf einer Basiseinheit sitzt, mit ein paar zusätzlichen Knöpfen und Reglern, die um ihn herum angeordnet sind. An der Seite ragt ein Telefonhalter heraus, um einen Blick aus der Sicht der Drohne zu ermöglichen.
Der Joystick bietet dem Benutzer vier Freiheitsgrade im Flug, die ein natürlicheres Bewegungsgefühl entlang der Vorwärts-/Rückwärts-, Links-/Rechts- und Auf-/Abwärtsachse sowie dem Gieren ermöglichen. Damit soll die kognitive Arbeitsbelastung des Fliegens reduziert werden, so daß sich der Pilot auf den Flug oder das Filmen konzentrieren kann, anstatt mit der Drohne zu kämpfen, damit sie das tut, was er will.
Zwar besteht Fluidity Technologies darauf, den FT Aviator als ‚Einhand-Controller‘ zu bezeichnen, doch auf fast allen Fotos und Videos ist zu sehen, daß zweite Hand benötigt wird, um die Basis zu halten. Und selbst wenn der Controller auf einen Tisch oder auf dem Schoß liegt, wird eine zweite Hand für die Tasten und anderen Bedienelemente benötigt.
Interessenten scheint es dennoch genügend zu geben, denn die Kickstarter-Kampagne mit einem Zielbetrag von 50.000 $ verläuft überaus erfolgreich, als sich 428 Unterstützer mit zusammen 105.884 $ beteiligen, um das Projekt zu verwirklichen. Wenn alles nach Plan verläuft, soll die Auslieferung des FT Aviator im Februar 2019 beginnen. Dem Stand von Anfang 2020 zufolge bietet Fluidity Technologies den Controller inzwischen für 350 $ an.
Zur Erinnerung: Eine Einhand-Steuerung hatte bereits das Konzept Shift, das in der Jahresübersicht 2016 vorgestellt wurde.

Smart Glove
Eine besondere Steuerung für Astronauten wird im Dezember 2019 vorgestellt.
Zwar sollen Drohnen oder andere Robotervorrichtungen bei der Erforschung
anderer Planeten helfen, doch ihre Steuerung mit Raumanzug-Handschuhen
bildet eine Herausforderung. Herkömmliche Raumanzug-Handschuhe haben
nicht nur relativ dicke Finger, sondern stehen auch unter Druck und sind
daher ziemlich steif, was die Fingerbewegungen erschwert. Damit sind
sie kaum geeignet, um die Joysticks der Fernsteuerung einer Drohne zu
bedienen.
Vor diesem Hintergrund entwickelt das norwegische Startup Ntention, das aus Studenten der norwegischen Universität für Wissenschaft und Technologie (NTNU) besteht, gemeinsam mit den Partnern NASA, Mars-Institut, SETI-Institut und Collins Aerospace den Astronaut Smart Glove, der integrierte Sensoren verwendet, um selbst feinste Hand- und Fingerbewegungen zu erkennen. Diese werden in verschiedene Arten von Befehlssignalen umgewandelt, die drahtlos an ein mobiles Gerät im Raumanzug übertragen werden, das sie seinerseits in Echtzeit an die Drohne weiterleitet.
Das Mars-Institut ist übrigens eine internationale, nichtstaatliche, gemeinnützige Forschungsorganisation, die sich der Förderung der wissenschaftlichen Untersuchung, Erforschung und des öffentlichen Verständnisses des Mars verschrieben hat. Der Hauptsitz befindet sich im NASA Ames Research Center (USA), mit Büros in Toronto (Kanada) und Stavanger (Norwegen).
Der Meldung zufolge haben die Ames-Wissenschaftler die Technologie bereits im Sommer im Rahmen des Haughton-Mars-Projekts der Weltraumbehörde auf der Mars-ähnlichen Insel Devon in der Arktis getestet. Dabei konnten die mit einem vollständigen Raumanzug bekleideten Handschuhträger erfolgreich einen traditionellen Quadrokopter fernsteuern. Das Basissystem kann aber auch für den terrestrischen Einsatz, etwa im Bauwesen, angepaßt werden.

Interessanterweise folgt schon im April 2020 der Bericht
über einen weiteren Raumanzug-Handschuh mit Steuerungsfunktion, der von
der Europäischen Weltraumorganisation (ESA) stammt.
Der von der Firma Comex und der Designerin Agatha Medioni entworfene Prototyp-Handschuh namens Power glove, der aus dem zweijährigen Pextex-Projekt der Raumfahrtbehörde zur Suche nach neuen Materialien für Raumanzüge hervorgegangen ist, enthält technische Hilfsmittel, die die zukünftigen Astronauten bei ihrer Arbeit unterstützen sollen.
Zusätzlich zu den üblichen Funktionen eines Raumanzug-Handschuhs hat das neue Konzept drei zusätzlichen Vorrichtungen, die in die Finger eingebaut sind. Eine davon ist die Gestensteuerung, die es dem Astronauten ermöglicht, einen Rover oder eine Drohne mit Handbewegungen fernzusteuern. Die zweite ist ein eingebauter Laser zur Ziel- und Entfernungsmessung, und die dritte ist ein Display, das den Status des Raumanzugs und die verbleibende Menge an Verbrauchsstoffen anzeigt – eine große Verbesserung gegenüber den derzeitigen Anzügen, bei denen die am Rumpf angebrachten Displays mit einem Handgelenkspiegel abgelesen werden müssen.
Zu den technologischen Entwicklungen zählen auch die solarbetrieben
Langstreckenflugzeuge für große Höhen, die in den vorangegangenen
Übersichten schon mehrfach präsentiert wurden. Hier folgt der aktuelle
Stand diesen Jahres.
Bereits im Februar 2018 wird gemeldet, daß die Firma AeroVironment
Inc. vor kurzem ein Joint-Venture zur Entwicklung solarbetriebener
Langstreckenflugzeuge für großer Höhen gegründet hat, welches das Entwicklungsprogramm
mit bis zu 65 Mio. $ finanzieren wird. Letztlich ist das Joint-Venture
ein japanisches Unternehmen, da es zu 95 % von dem in Japan ansässigen
Telekommunikationsbetreiber SoftBank Corp. finanziert
und gehalten wird.
Die Partner haben vereinbart, die entsprechenden Hintergrundpatente an die neue HAPSMobile Inc. zu lizenzieren, den Eigentümer des neu entwickelten geistigen Eigentums im Bereich des UAVs, die die Exklusivrechte für kommerzielle Anwendungen weltweit sowie für nicht-kommerzielle Anwendungen in Japan besitzt. Die Exklusivrechte für den Entwurf und die Herstellung der Flugzeuge für HAPSMobile verbleibt hingegen im Besitz der AeroVironment, vorbehaltlich der Bedingungen der Joint-Venture-Vereinbarung.

(Grafik)
Im April 2019 gehen die HAPSMobile und die Alphabet-Tochter Loon LLC eine strategische Partnerschaft ein, um die Nutzlasttechnologie, die bereits bei den Stratosphärenballons von Loon verwendet wird, für das HAWK 30 Solar-HAPS (o. HAWK30) genannte Stratosphären-Fluggerät anzupassen.
Einen Meilenstein meldet AeroVironment im Mai, als die Montage des ersten HAWK30 beendet wird. Laut Wahid Nawabi, Präsident und Hauptgeschäftsführer von AeroVironment, ist das gesamte System in nur 24 Monaten entworfen, entwickelt und zusammengebaut worden. HAPSMobile hatte vor kurzem den Umfang des Design Development Agreement mit AeroVironment um 39 Mio. $ auf insgesamt 126 Mio. $ erhöht.
Die Firma leistet seit den 1970er Jahren Pionierarbeit bei bemannten Solarflugzeugen und Höhenforschungsflugzeuge und entwickelte und demonstriert ab Ende der 1990er Jahre mehrere Systeme für das NASA-Programm ERAST (Environmental Research Aircraft and Sensor Technology).
Helios (o. Centurion), der Nurflügler mit 14 Elektromotoren und einer Spannweite von über 78 m, stellt im August 2001 einen Höhenrekord für propellergetriebene Flugzeuge auf, als er im Laufe eines 17-stündigen Fluges eine Höhe von 29.413 m erreicht und damit nicht nur den bisherigen Rekord des o.g. Pathfinder-Plus bricht, sondern auch rund zwei Meilen höher kommt als bislang jedes nicht-raketengetriebene Flugzeug.

Im Juni 2003 stürzt Helios etwa 16 km der Hawaii-Insel Kauai in den Pazifik. Als Absturzursache wird ein Problem mit der Steuerung des Flugzeugs angegeben. Die divergente Phygoide Schwingung (eine Bahnschwingung der Längsbewegung) kann auch durch eingeleitete Notverfahren nicht mehr rechtzeitig gestoppt werden, und starke Geschwindigkeitsüberschreitungen führen schließlich zum Versagen der Struktur und damit zum Absturz.
Der neue HAWK 30 hat eine Spannweite von etwa 79 m, wird von 10 Elektromotoren angetrieben und trägt Lithium-Ionen-Batterien an Bord, die von Solarzellen versorgt werden, welche die Oberfläche des Flügels bedecken. Er fliegt in einer Höhe von etwa 20.000 m über dem Meeresspiegel und über den Wolken und ist für kontinuierliche, ausgedehnte Missionen von bis zu sechs Monaten ohne Landung ausgelegt. Die Reisegeschwindigkeit beträgt 110 km/h. Im Juni wird mit der Durchführung von Bodentests am Armstrong Flight Research Center (AFRC) der NASA in Kalifornien begonnen.
Im August erhält HAPSMobile von der US-Luftfahrtbehörde FAA ein Zulassungszertifikat für den Flug des HAWK 30 in der Stratosphäre über der hawaiianischen Insel Lanai, damit das Flugzeug innerhalb des Pan-Pacific UAS Test Range Complex getestet werden kann. Dabei arbeitet die Firma mit der University of Alaska Fairbanks, die den Testbereich verwaltet, und der University of Hawaii zusammen.
Das Flugzeug soll Sendeausrüstung mit sich führen, um Mobilfunkdaten zum Boden zu übertragen, wobei laut HAPSMobile ein Gebiet von etwa 3,14 Mio. Hektar abgedeckt werden kann. Dem Partner SoftBank zufolge, könnten 40 solcher Flugzeuge ganz Japan mit Mobilfunk versorgen. Die Ankündigung des HAWK 30-Testflugs erfolgt, nachdem HAPSMobile Anfang des Monats an der HAPS-Flugvorführung von Facebook in Oudtshoorn, Südafrika, teilgenommen hat.

Das Social-Media-Unternehmen hatte im Vorjahr das eigene Projekt des solarbetriebenen Aquila aufgegeben (s.u. 2015) und konzentriert sich nun auf die Zusammenarbeit mit Luft- und Raumfahrtfirmen wie Airbus und HAPSMobile, um die Entwicklung und Einführung von HAPS-Kommunikationstechnologien für den Einsatz in Gebieten zu beschleunigen, die von den alten Telekommunikationsnetzen schlecht bedient werden, wie z.B. bergige Regionen, abgelegene Inseln und Entwicklungsländer.
Bei der Demonstration in Südafrika fliegt ein konventionelles Kleinflugzeug mit der Telekommunikationsausrüstung von Facebook an Bord in einer Höhe von etwa 4.000 m und testet die Übertragung von Daten in den HAPS-Frequenzbändern 26 GHz und 38 GHz. Diese Frequenzbänder werden auf der Weltfunkkonferenz WRC-19 in Ägypten im Oktober diesen Jahres als Standards für künftige HAPS-Übertragungen festgelegt. HAPSMobile glaubt, daß die HAWK 30-Flieger bereits 2023 einen Mobilfunkdienst anbieten könnten.
Im September 2019 folgt eine befristete Flugfreigabe vom Airworthiness and Flight Safety Review Board des AFRC, um einen Testflug im beschränkten Luftraum durchzuführen. Im selben Monat findet der erfolgreiche Erstflug des HAWK 30 statt, über den aber keine Details mitgeteilt werden. Die zweite Flug am Armstrong Flight Research Center erfolgt Ende Oktober, geht immerhin schon rund anderthalb Stunden und führt dabei u.a. 180°-Drehungen durch.
Loon und HAPSMobile geben im Februar 2020 bekannt, daß sie die Entwicklung der Kommunikationsnutzlast für die Stratosphären-Testflüge beendet haben, die eigentlich noch im März absolviert werden sollten – wofür es bislang aber keinen Beleg gibt. Im August folgen Berichte darüber, daß der zwischenzeitlich in HAPSMobile Sunglider umbenannte HAWK 30 im Vormonat eine weitere Testrunde in New Mexico erfolgreich abgeschlossen hat, wo er vom Spaceport America aus zu seinem vierten Einsatz gestartet ist. Das Team plant als nächste Testflüge des unbemanntes solarbetriebene Flugzeugs in stratosphärischen Höhen.

(Grafik)
Im Mai 2018 berichten die Fachblogs über die Firma UAVOS
Inc.,
die 2011 in der Schweiz gegründet wurde und im Jahr 2016 ihren
Hauptsitz ins Silicon Valley in Kalifornien verlegt hatte. Das weltweit
operierende Unternehmen, dessen Angebot von kleinen unbemannten, industriellen
Überwachungsdrohnen bis hin zu großen UAVs reicht, hat zudem eine Niederlassung
in Hongkong.
Zu den UAVOS-Produkten gehört ein autonomer, solarbetriebener Pseudo-Satellit für große Höhen (High Altitude Pseudo Satellite, HAPS) namens ApusDuo, der dafür ausgelegt ist, mit einem speziell entwickelten Steuerungssystem, das auf einer Multiplattform-Autopilotlösung basiert, über lange Zeiträume an den Rändern des Weltraums zu schweben.

Die Anwendungen des Fluggeräts reichen von elektronischer Kriegsführung über Kommunikation bis hin zur Beobachtung und Überwachung großer Gebiete. Nun hat die UAVOS die ersten Testflüge mit einem ApusDuo-Prototypen durchgeführt.
Das aus Kohlefaserwerkstoffen hergestellte solarbetriebene Flugzeug hat zwei 28 m lange parallele, durch drei Streben verbundene Tragflächensätze, die sich biegen und federn, um es bis zu einem Jahr am Stück in der Luft zu halten.
Die ApusDuo hat eine Tragfähigkeit von 8 kg und wird von Solarpaneelen angetrieben, die über die gesamte Breite der Flügel verteilt sind. Gesteuert wird sie von einem kleinen Bordcomputer, der dafür ausgelegt ist, die Flügel des Flugzeugs im Flug zu beugen, es zu lenken und bei wechselnden Wetter- und Windverhältnissen in der Luft zu halten. Start und Landung werden ebenfalls automatisch abgewickelt.

(14 m)
Der aktuelle Prototyp des ApusDuo hat eine Spannweite von 10 m (andere Quellen: 14 m), wiegt 15 kg und hat bereits mehr als 1.000 Stunden in der Luft in einer Höhe von bis zu 20 m verbracht.
Das ist zwar noch weit vom eigentlichen Ziel von mindestens 15.000 m Flughöhe entfernt, doch die Testflüge belegen, daß die flexiblen Flügel das Flugzeug auch in Turbulenzen fliegen lassen. Die erste Phase der Flugtests wird im Oktober abgeschlossen.
Im November 2019 wird dann der erfolgreiche Abschluß des Testflugs eines neuen Prototypen mit einer Spannweite von 14 m bekanntgegeben. Bei diesem wurde die Konstruktion der Hauptelemente so modifiziert, daß sie einer höheren Zuverlässigkeit und einem geringeren Gesamtgewicht der Struktur führten.
Zu den Höhen-Solarflugzeugen gehört auch die Flugdrohne Zephyr aus
dem Jahr 2014,
die später den Namen High-Altitude Long Endurance (HALE)
UAV bekommt und Teil des High Altitude Pseudo-Satellite (HAPS) Programms
von Airbus wird.
Nachdem länger kaum etwas darüber zu hören war, stellt die Airbus Defence and Space im Juli 2018 auf der Farnborough Air Show den neuen hochfliegenden Pseudosatelliten Zephyr S HAPS vor, als erste Drohne aus der Serienfertigung des Zephyr-Programms, die in dem neu eröffneten Kelleher-Produktionswerk erfolgt, welches nach dem verstorbenen Zephyr-Erfinder Chris Kelleher benannt ist. Die bisherigen Zephyr-Maschinen waren hingegen Prototypen für Forschungs- und Entwicklungszwecke.

Schon Anfang August stellt das Solarflugzeug bei seinem Erstflug einen neuen Ausdauer-Weltrekord auf, indem es 26 Tage lang ununterbrochen in der Luft bleibt. Das unbemannte Flugzeug war am 11. Juli in Arizona gestartet und erst nach 25 Tagen, 23 Stunden und 57 Minuten wieder gelandet. Sobald die Serienproduktion der Zephyr S aufgenommen wird, werden die Drohnen dann rund drei Monate lang ununterbrochen fliegen.
Das 75 kg leichte Flugzeug mit 25 m Spannweite wird nur mit Solarstrom betrieben und fliegt in 21 km Höhe. Besonders beeindruckend ist, daß es bis zum Fünffachen seines Eigengewichts tragen kann. Genutzt werden soll es zunächst als Relaisstation, um Internetverbindung in entlegene Gegenden der Welt zu bringen. Erstkunde ist das britische Verteidigungsministerium.
Airbus wird die Zephyr S ab September von einer neuen Flugbetriebsstätte auf dem Flugplatz Wyndham in Westaustralien aus betreiben. Dieser Ort wurde hauptsächlich aufgrund des fast unbeschränkten Luftraums und des stabilen Wetters als erster Start- und Landeplatz ausgewählt. Für die steigende Nachfrage entwickelt Airbus zudem ein noch größeres Solarflugzeug namens Zephyr T, das eine Flügelspannweite von 33 m haben wird und etwa 140 kg wiegen soll.
Im Dezember gibt der Batteriehersteller Amprius Inc. bekannt, daß für das Zephyr-Programm seine fortschrittlichen Lithium-Ionen-Zellen eingesetzt werden, die auf einer Silizium-Nanodraht-Technologie basieren und Anoden enthalten, die zu 100 % aus Silizium bestehen und eine spezifische Energie von über 435 Wh/kg aufweisen.
Im Dezember 2023 ist zu erfahren, daß Airbus die Solardrohne Zephyr S nutzen will, um voraussichtlich im dritten Quartal des kommenden Jahres einen Internetzugang anzubieten. Die Zephyr soll in der Stratosphäre, in einer Höhe von 20 - 50 km kreisen und von dort ein 7.500 km2 großes Areal mit Internetdiensten versorgen. Die britische Airbus-Tochter Aalto Haps will mit dem Dienst in Kenia starten - sowie pro Jahr 50 - 75 Solardrohnen bauen und damit in Konkurrenz zu SpaceX treten, das über seine Satellitenkonstellation Starlink ebenfalls schnelle Internetzugänge anbietet.

Solarenergie ist aber nicht die einzige Methode, um an den Rand der Atmosphäre
zu gelangen. Dies beweist Anfang September 2018 die Perlan
II, ein zweisitziges antriebsloses Forschungsflugzeug mit
Druckkabine und einer Spannweite von 27 m, das von Greg Cole für
das Perlan-Projekt von Airbus entworfen und bei Windward
Performance gebaut wurde.
Die Piloten Jim Payne und Tim Gardner erreichen in den Wellenaufwinden über Argentinien, die als die höchsten stratosphärischen Bergwellen der Welt gelten, eine Höhe von 23.165 m und übertreffen damit sogar den Höhenweltrekord des CIA-Spionageflugzeugs U2 von 1989 (22.475 m), das wohlgemerkt von einem Triebwerk mit 17.000 lbs Schub angetrieben wurde, während das motorlose, ultraleichte Segelflugzeug Perlan 2, das im leeren Zustand nur 500 kg wiegt, ein besonderes Zusammenspiel von troposphärischen und polaren Luftströmungen zum Auftrieb nutzt. Das Endziel ist, daß das Flugzeug 27.400 m erreicht.

Mitte November 2018 hört man auch wieder von der mit
Solarenergie betriebenen Höhenflugdrohne Odysseus der
Firma Aurora Flight Sciences, die Teil des Boeing-Konzerns
ist, und die in der Jahresübersicht 2008 erstmals
ausführlich vorgestellt wurde (s.d.).
Das Unternehmen gibt nun bekannt, daß die riesige Solardrohne in der ersten Hälfte des kommenden Jahres das erste Mal in die Luft steigen und letzlich in rund 20 km Höhe mehrere Monate ohne Unterbrechung fliegen soll. Über die genauen Spezifikationen des Flugzeugs schweigen sich die Ingenieure von Aurora Flight Sciences aber noch aus. Allerdings ist anhand des veröffentlichten Fotos des aktuellen Prototyps in Originalgröße erkennbar, daß man inzwischen von der ursprünglichen, unkonventionellen Zickzack-Form Abschied genommen hat.
Um das Gewicht so gering wie möglich zu halten, besteht das Flugzeug hauptsächlich aus Kohlefaser-Traversen, die mit einer leichten, UV-beständigen Folie namens Tedlar überzogen sind. Die Solarzellen, deren Elektrizität die Motoren des Flugzeugs antreibt und auch in Bordbatterien gespeichert wird, um es nachts fliegen zu lassen, sind auf den Tragflächen und den Seiten des Rumpfes und der Leitwerke angebracht.
Das Projekt wird 2019 auf unbestimmte Zeit verschoben, weitere Neuigkeiten gibt es bislang nicht.
Im Dezember 2018 stellt Yuri Fattah,
der bei der International Civil Aviation Organization (ICAO) in Montreal
arbeitet, das Design eines autonomen Flugzeugs vor, dessen Graphiken
von dem Fahrzeugdesigner Ashish Thulkar aus Mumbai stammen.
Der ArcAngel ist ein auf Segelflugzeugen basierendes
Konzept, das die luftgestützte Überwachung und die Relaiskommunikation
bei Katastrophen ermöglicht, was sich auch durch das Namenskürzel ‚ARC‘
äußert, das für Airborne Reconnaissance and Communication steht.

(Grafik)
Der ArcAngel wird von einem Transportflugzeug in sein Einsatzgebiet geschleppt. Einmal in Betrieb genommen, wird er thermischen Auftrieb, Hangaufwind und Wellenauftrieb nutzen, um in der Luft zu bleiben. Bei Katastrophen in der Nähe von Bergen kann er damit bis auf über 10.000 m steigen und dabei potentielle Energie speichern. Während er dann in das Katastrophengebiet gleitet, nutzt er seinen großen Propeller, um die potentielle Energie in elektrische Energie für die Bordsysteme umzuwandeln. Der Propeller funktioniert auch als Motor zum Antrieb.
Der Rumpf hat eine durchsichtige Haut, die den Einsatz von optischen Geräten im Inneren ermöglicht. Das Seitenleitwerk ist nach unten gerichtet, so daß es auch eine Überwachungsantenne aufnehmen kann. Die großen Flügel enthalten zwei Kammern, in denen Sensoren untergebracht werden können, die 3D-Bilder in verschiedenen Wellenlängen liefern.
Fortgeschrittenere Versionen des ArcAngel wären in der Lage, Winde in sehr großer Höhe zu nutzen. Sie könnten in der oberen Grenze des Jetstreams in einer Höhe von 12.000 m oder in 20.000 m in tropischen Zonen fliegen.
Weiter mit den Elektro- und Solarfluggeräten ...