Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2013 (B)
Auf der weltgrößten Messe für Drohnen, der im August stattfindenden
dreitägigen Unmanned
Vehicle Systems International in Washington, ist unter den Exponaten
auch eine Hybrid-Drone, die als Mischung zwischen einem Quadrokopter
und einer konventionellen Flugdrohne beschrieben wird.

Das Hybrid Quadrotor UAV der Firma Latitude Engineering LLC aus Tucson, Arizona, kann mittels vier horizontal angebrachten Propellern auf der Stelle schweben oder vertikale Starts und Landungen durchführen. Diese Propeller werden jeweils von einem eigenen Elektromotor angetrieben und erhalten ihre Energie gemeinsam von zwei Lithium-Polymer-Akkus (5 Zellen, 11.000 mAh).
Hat der Flieger seine Reiseflughöhe erreicht, schaltet sich allerdings ein 0,5 PS 4-Takt-Gasmotor an, der das nun eher traditionelle Starrflügel-Flugzeug bis auf 74 km/h beschleunigt und Flugzeiten bis zu 15 Stunden erlaubt. Die Entwicklung des Hybrid-Modells erfolgte im Auftrag der U.S. Navy, die nun Feldtests plant. Der erwartete Verkaufspreis beträgt rund 60.000 $, eine kleine Version soll es für 25.000 bis 30.000 $ geben.
Im April 2014 meldet Latitude die gemeinsam mit Arcturus durchgeführte Flugerprobung des Modells JUMP 15, das völlig autonom starten, vom Schwebeflug zum Starrflügler-Flug übergehen und ebenso landen kann. Im Juli wird erfolgreich das Modell HQ-40 demonstriert, dem im Dezember Testflüge mit dem HQ-60A folgen. Dieser bildet den ,Prüfstand’ für den HQ-60B, der für eine Nutzlast von 5,5 kg und eine Flugzeit von 15 Stunden Dauer ausgelegt ist – was die Ausdauer belegen soll, die ein Quadrokopter mit dem Hybridkonzept der Firma erreichen kann. Im Januar 2015 folgen Testflüge des JUMP 20, im Mai mit dem HQ-60B.

Innerhalb von 30 Tagen im August und September gelingt es den Innovatoren
des Spiri über kickstarter.com von 382 Unterstützern
mehr als 140.000 $ einzunehmen – obwohl sie eigentlich nur 125.000
$ wollten.
Der durchgestylte Quadrokopter der Firma Pleiades Consulting Inc. aus dem kanadischen Halifax soll vollautomatisch fliegen, selbständig einen vorgegebenen Kurs aufnehmen, genau definierte Ziele anfliegen und bei leerem Akku zur Sicherheit ebenso autonom landen. Potentielle Abstürze soll die Hülle aus Kohlefaser abfedern.
Die 400 g schwere und 340 x 340 mm große Drohne läßt sich außerdem individualisieren, da sie über GPS, mehrere Kameras, vier Rotoren, W-Lan, Bluetooth, 4 GB Speicher, einen USB-Port und einen 1 GHz Dualcore-Prozessor verfügt. Als Betriebssystem kommt eine Ubuntu-Variante zum Einsatz, die um die Open-Source-Software ROS (Robot Operation System) ergänzt wurde. Die Firma schätzt, im Mai 2014 mit der Auslieferung beginnen zu können – zu einem Stückpreis von 545 $.
Im September 2013 ist zu erfahren, daß Forscher der Michigan
State University um Bruno Basso Quadrokopter
einsetzen wollen, um die Gesundheit der Pflanzen zu kontrollieren. Ihr
Flieger benutzt dabei drei Instrumente: eine Wärmebildkamera, um die
Temperatur der Pflanzen zu prüfen und zu sehen, ob sie Wasser brauchen;
ein hyperspektrales Radiometer, das erkennbar macht, wann die Pflanzen
Stickstoff benötigen; und schließlich einen Laserscanner, der die Pflanzenhöhen
mißt.
Der Plan ist, die Drohne ab dem kommenden Sommer versuchsweise zwei- oder dreimal pro Jahr über die Felder von 75 Landwirten fliegen zu lassen, jeweils 25 in den Staaten Michigan, Illinois und Iowa.
Ebenfalls im September bekennt sich die deutsche Piratenpartei zum
Einsatz einer Drohne während einer CDU-Wahlkampfveranstaltung in Dresden,
bei der das etwa 40 cm große Fluggerät nur wenige Meter vor der Bundeskanzlerin
Angela Merkel abgestürzt war.
Typisch für diesen Chaosverein: Während der Bediener der Drone aussagt, daß sie einzig dem Zweck diente, ein Video der Kanzlerin und anderen anwesenden Politikern aufzunehmen, erklärt der Piraten-Vize Markus Barenhoff, Ziel des Einsatzes war, der Kanzlerin und Verteidigungsminister de Maizière ein Gefühl dafür zu vermitteln, wie es ist, plötzlich selbst von einer Drohne beobachtet zu werden.
Für den Spaß wird ein Bußgeld von 528,50 € fällig, weil die Drohne in der Kontrollzone des Dresdner Flughafens ohne Flugerlaubnis des Towers gestartet war.
Das Thema Drohnen – womit in diesem Umfeld inzwischen zumeist mit
Kameras bestückte Quadrokopter gemeint sind – wird derweil
immer aktueller. Das Magazin c’t Digitale Fotografie widmet sich daher
in der Quartalsausgabe 3/2013 ausführlich dem Thema.
Auf über 20 Seiten wird eine Übersicht der Drohnentechnik und Kameras
gegeben, gefolgt von jeder Menge Rechtsfragen, angefangen von der in
Deutschland wohl wichtigsten: „Darf meine Drohne in Nachbars
Garten fliegen?“
Der US-Künstler Adam Harvey stellt im Oktober und November 2013 in
Wien seine Anti-Drohnen-Mode aus und zeigt auch, wie man Gesichtserkennungssoftware
am besten mit Make-up austrickst.
Seine zusammen mit Johanna Bloomfield kreierte Anti-Überwachungs-Modelinie Stealth Wear umfaßt einen Kapuzenüberhang, der vor den Thermosensoren der Drohnen schützt, sowie eine Tasche, die eine Handyortung unmöglich macht. Es kommt Harvey allerdings weniger um Produkte an als um die Schaffung eines Bewußtseins für die fast schon allgegenwärtige Überwachung.
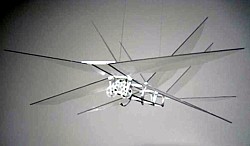
Im November machen einmal wieder die Forschern der ETH Zürich von
sich reden. Diesmal zeigen sie Flugdrohnen, die zwei gespannte Seile
umfliegen und dabei neue Seilverbindungen spannen, bis
eine netzartige Struktur entstanden ist. Die Quadrokopter sind dafür
mit Spulen ausgestattet, auf denen ein besonders reißfestes Kunststoffseil
aufgerollt ist. Die Betätigung als selbständige Brückenbauer wird durch
ein unabhängig agierendes Computersystem gesteuert. Dabei wirken die
Drohnen wie mechanische Spinnen, die durch die Luft schwirren statt zu
klettern.
Daneben arbeiten die Züricher Entwickler an einem intelligenten Software-Update, das Quadrokopter absturzsicher machen soll, indem es die Drohne beim Ausfall eines oder mehrerer Propeller trotzdem weiter in der Luft hält. Das System funktioniert mit den meisten Quadrokoptern via Software-Update und sogar dann, wenn sich drei Propeller verabschieden.

der Uni Kassel
Der zugrundeliegende Algorithmus wäre sicherlich auch für ein Projekt
der Universität Kassel förderlich, wo ein Forschungsteam
um Prof. Albert Claudi schon seit drei Jahren einen
Flugroboter testet, der Hochspannungsmasten überwachen soll. Der kaum
einen Meter große und mit Kameras, speziellen Sensoren für die Messung
mit Infrarot, Ultraschall und von elektromagnetischen Feldern sowie
einem Navigationssystem ausgestattete Flugroboter, der unter dem Namen Unikopter (auch:
Multikopter) bekannt wird, fliegt Strommasten ab und registriert Schäden
an den Leitungen.
Nun soll der Kopter das Fliegen ohne Fernsteuerung lernen und beispielsweise Hindernisse selbständig erkennen oder bei niedriger Batterie alleine zur Ladestation zurückfliegen. Im Gegensatz zu den bisherigen Überprüfungen, bei denen Kontrolleure die Leitungen vom Boden aus mit einem Fernglas beobachten oder mit einem Sicherheitsabstand von einigen zehn Metern per Hubschrauber an die Masten heranfliegen und den Zustand der Leitungen mit einer Filmkamera dokumentieren, kann der Multikopter Masten und Leitungen aus jeder Perspektive und aus kurzer Distanz filmen, da er bis auf einen Meter an den Mast heranfliegen darf.

Ebenfalls äußerst praktikabel ist eine drahtlose Ladestation,
an der Drohnen ihre Akkus laden können, und die von dem Berliner Startup SkySense
Inc. entwickelt wird. Obwohl diese Methode natürlich – im Gegensatz
zum Akkutausch – ebenso viel Zeit braucht, wie eine Drohne mit
Drähten aufzuladen. An einer ähnlichen Anwendung, um Quadrokopter mit
einem Induktionssystem aufzuladen, arbeitet auch das
NIMBUS lab
der University of Nebraska-Lincoln, das ich bereits im Juni 2012 vorgestellt
habe (s.d.).
Das aus Andrea Puiatti und Michele Dallachiesa bestehende Skysense-Gründerteam kommt im November 2013 in die Presse, als es den Gründer-Preis ,Der Zeit voraus’ des Berliner Hardware Accelerator entgegennehmen darf. Nun soll schleunigst ein erster Prototyp fertiggestellt werden.

Im Gegensatz zur Induktionsladung erfolgt der Prozeß bei Skysense, indem die Drohnen mit Metallfüßen als Kontakte ausgestattet sind, welche bei erfolgter Landung den Ladevorgang selbständig starten. Wobei die Drohne ihre Ladestation natürlich automatisch finden soll. Die Ladepads sind für Lithium-Polymer-Batterien optimiert und haben eine Output-Spannung zwischen 12 und 24 V.
Im November 2014 erscheinen erste Bilder des Systems, das sich durch eine wetterfeste, goldfarbene Landeplatte auszeichnet, die nun in drei Größen für unterschiedliche Arten von Drohnen produziert wird (43 cm für 649 $; 86 cm für 1.425 $; 172 cm für 4.365 $). Die Auslieferung soll im Januar 2015 beginnen, was sich dann jedoch zuerst auf den März und dann auf den Juni verschiebt – wobei sich die Preise noch vor irgendwelchen tatsächlichen Verkäufen drastisch auf 1.130 $, 2.410 $ und 7.865 $ erhöhen.
Außerdem ist nachdrücklich zu beanstanden, daß sich die Skysense ausschließlich in englischer Sprache präsentiert, wofür in meinen Augen auch das zwischenzeitlich in Las Vegas, Nevada, eröffnete Büro keine ausreichende Entschuldigung darstellt.

SkySense entwickelt zudem ein Zusatzteil namens Droneport, das als Hangar dient, um die Drohne besser zu schützen, während sie auflädt. Das Team schließt außerdem Vereinbarungen mit Unternehmen wie Aibotix Italia und der Drohnen-Management-Plattform DroneDeploy, um die Implementierung von vollständig autonomen kommerziellen Drohnen zu erleichtern.
Im Jahr 2016 belegt SkySense bei den NASA Europa Challenge den 1. Platz, während im Juli 2018 über ein Joint Venture mit dem spanischen Informations- und Kommunikationstechnologie-Entwickler Avansig berichtet wird, welches für das weltweit operierende multinationale Sicherheitsunternehmen Prosegur, das ebenfalls in Spanien ansässig ist, einen vollautomatischen Drohnensicherheitsdienst für Innenräume entwickeln wird.
Im März 2019 tut sich SkySense mit der erst 2016 in Palo Alto gegründeten Firma FlytBase Inc. zusammen, um eine preiswerte Drone-in-a-box-Lösung auf den Markt zu bringen – und im August folgt die Einführung der wetterfesten High Power Outdoor Charging Pads, die über eine Leistung von 500 W verfügen, einen Wirkungsgrad von 92 % besitzen und zu diesem Zeitpunkt als schnellste schlüsselfertige Lösung für die automatische Aufladung von Drohnen auf dem Markt gelten.
Hinweis: Die SkySense sollte nicht mit der leicht anders geschriebenen schwedischen Firma Skysense AB verwechselt werden, die sich mit dem Schutz vor Drohnenangriffen befaßt.

Auch ein weiterer Nano kommt im November auf den Markt. Diesmal heißt
er Proto X und stammt von der Firma Estes-Cox
Corp., die bislang für ihre Modellraketen bekannt war.
Der winzige Quadrokopter wiegt nur 11,3 g und kostet 40 $.
Außerdem kursieren in diesem Monat in der Presse weiter Berichte darüber
(die sich in den darauffolgenden Monaten und Jahren immer häufiger
wiederholen), daß Drohnen für den Schmuggel eingesetzt
werden. In einem Fall, der sich im US-Bundesstaat Georgia zuträgt,
werden vier Männer festgenommen die versuchen, mit einem ferngesteuerten
Hexokopter Tabakpäckchen in den Gefängnishof des Calhoun State Prison
zu werfen.
Eine ähnliche Meldung erfolgt aus Kanada, wo eine kleine, ferngesteuerte Helikopterdrohne über die Mauern des von Wald umgebenen Hull Gefängnisses in der Stadt Gatineau in Quebec fliegt. Die Gefängniswärter durchsuchen zwar das Gelände und die Umgebung sorgfältig, können das Paket aber nicht finden, das die Drohne möglicherweise getragen hat. Die Behörden geben zu, daß es sich dabei nicht um einen Einzelfall handelt, sondern bereits oft in Gefängnissen in ganz Quebec geschieht.
Eine andere Meldung mit ebenfalls nicht ganz legalem Hintergrund besagt,
daß der Hacker Samy Kamkar die nötigen Spezifikationen
vorgelegt hat, mit denen es zum Preis von rund 400 $ möglich ist, eine
Drohne zum Hacken und Übernehmen anderer Fluggeräte umzurüsten. Das SkyJack genannte
Konzept umfaßt einen Mini-Rechner Raspberry Pi, eine kleine USB-Batterie,
einen W-Lan-Stick und eine Drohne des französischen Herstellers Parrot.
Der als Entführer agierende Quadrokopter ist so programmiert, daß er weitere in der Nähe befindliche Parrot-Drohnen bzw. deren Fernsteuerungssignal ermittelt, dieses unterbricht und sich bei der Zieldrohne als deren Besitzer an meldet. Nachdem so die Fernsteuerung gekapert ist, kann der Hacker die Kamera und Flugkontrolle steuern. Kamkar hat sich vermutlich deshalb auf gerade die Parrot-Drohne konzentriert, weil dieser populäre Flugroboter seit seiner Einführung 2010 bereits mehr als 500.000 mal verkauft worden ist.

Die vorangegangene Meldung kollidiert mit der im Dezember sehr weit gestreuten
Nachricht, daß nun auch Amazon darüber nachdenkt,
Waren per Oktocopter auszuliefern, weshalb die Forschungs- und Entwicklungsabteilung
des Konzerns bereits verschiedene Drohnen testet.
Mit einem Oktocopter können Pakete mit einem Gewicht von bis zu 2,5 kg innerhalb von 30 Minuten zugestellt werden, sofern das nächste Amazon-Lager nicht mehr als 16 km entfernt ist. Im Grunde überaus sinnvoll, denn mehr als 85 % aller Amazon-Sendungen liegen in dieser Gewichtsklasse.
Aufgrund der Genehmigungsverfahren der US-Luftfahrtbehörde FAA ist ein Praxiseinsatz vor 2015 ausgeschlossen, doch schon in vier bis fünf Jahren könnten die Geräte im regulären Geschäftsbetrieb zum Einsatz kommen. Kritiker betrachten die von Amazon-Chef Jeff Bezos gemachte Ankündigung jedoch nur als sehr cleveren Marketing-Trick, mit dem das Angebot der ,Same Day Delivery’ forciert werden soll.
Ebenfalls im Dezember 2013 werden
1.200 Soldaten, zwei Jäger und zwei Hubschrauber mobilisiert, als eine
Drohne in der Nähe der Flugrouten des Flughafen
Peking gesichtet
wird. Es gelingt dem gewaltigen Aufgebot, die drei Betreiber der Drohne
zu verhaften, weitere Details werden nicht mitgeteilt.
Kommen wir nun zu den anderen Flugdrohnen, die in diesem Jahr in den Medien erscheinen. Sie orientieren sich zumeist an Vorbildern aus der Tier- und Pflanzenwelt, doch es gibt auch einige überraschende Ausnahmen. Außerdem werde ich auf mehrere weitere interessante Entwicklungen im Bereich der unbemannten Luftfahrt hinweisen.

So entwickeln
beispielsweise Forscher der University of Queensland einen
steuerbaren Flieger ohne zusätzlichen Antrieb. Das Polyplane,
das erstmals im Juli in der Presse erscheint, ist ein papierflieger-ähnliches,
superleichtes High-Tech-Modellflugzeug, das einfach geworfen wird. Daß
es gesteuert werden kann, ermöglichen druckbare Schaltkreise, ultraflache
Akkus sowie Kunststoffe, die sich wie Bimetalle an eine Form ,erinnern’
können.
Der kleine Flieger besitzt ein Onboard-Kontrollsystem, mit dem er sich selbst zu einen vorgegebenen Ziel, oder so nah wie möglich, hinsteuert, nachdem er von einem größeren Flugzeug oder einer Drohne über dem Einsatzgebiet freigelassen wird. Die Steuerung erfolgt mittels kleiner Querruder-Laschen, die an der Rückseite der Flügel angebracht sind.
Außerdem präsentieren die Entwickler eine fortgeschrittene Version des bereits im Mai 2009 vorgestellten Samara MAV Einflüglers in Form eines Ahorn-Samens (s.d.). Die Vorteile von Papier für ein Wegwerf-UAV sind offensichtlich. Es ist sehr billig und reichlich vorhanden, es ist leicht, seine aerodynamischen Eigenschaften sind bewährt, und es ist biologisch abbaubar, so daß die Auswirkungen auf die Umwelt begrenzt bleiben, nachdem das Einweg-UAV seine Aufgabe durchgeführt hat.
Konzipiert sind die Mini-Drohnen als Sensormodule zur Erfassung und Weiterleitung der Umweltbedingungen in schwierigem Gelände. So lassen sich Dutzende von ihnen beispielsweise über einem Waldgebiet aussetzen um die dortigen klimatischen Bedingungen zurückzumelden, die auf den Beginn oder die Bewegungen von Buschfeuern hinweisen könnten. Daneben werden natürlich auch militärische Einsätze ins Auge gefaßt.
Keinesfalls sollte man Papierflieger unterschätzen.
Im Rahmen der Werbeaktion ,Project Space Planes’ setzt Samsung im
Januar 2011 von einem Helium-Wetterballon in der Stratosphäre
200 Papierflieger aus, von denen jeder mit einer Speicherkarte bestückt
ist, die eine Nachricht transportiert. Der Elektronik-Konzern will damit
zeigen, wie stabil seine Samsung Memory SD Karten sind. Der Start erfolgt
in der Nähe von Wolfsburg – und platzen tut der Ballon wie geplant über
Berlin, nachdem er innerhalb von 2,6 Stunden bis auf eine Höhe von 37.339
m gestiegen ist.
Nach beachtlichen Reisen mit den Jet-Streams der Atmosphäre landen die Flugzeuge im Laufe der folgenden Wochen auf der ganzen Welt. So werden Funde aus Europa, Südafrika, Amerika und sogar Australien gemeldet.

Fledermausschwinge
Ebenfalls im Februar 2013 veröffentlichen Forscher der University
of Illinois at Urbana-Champaign (UIUC) um Prof. Seth
Hutchinson, die mit
Kollegen der Brown University in Providence, Rhode Island,
zusammenarbeiten, ihre bisherigen Erfahrungen mit der Entwicklung eines
Roboter-Fledermausflügels, den sie genau der Anatomie der Tieres nachempfunden
haben.
Das 15 cm lange Imitat hat Kunststoffknochen, eine ,Haut’ aus Silikon-Elastomer, durch drei Servomotoren bewegte Gelenke, und als Sehnen wirkende Kabel. Möglich wird die Herstellung durch die neue 3D-Drucktechnik. Nun kann die Dynamik des Schlagflugs von Fledermäusen ausführlich untersucht werden, ohne dazu lebendige Tiere strapazieren zu müssen.
Unter anderem zeigt sich dabei, wie die aerodynamischen Effekte der Flügelfaltung während der Aufwärtsbewegung den negativen Auftrieb verringern und die Flugeffizienz verbessern. Die Ergebnisse sollen nun zur Weiterentwicklung entsprechender Flugdrohnen-Designs genutzt werden. Sehr ähnliche Entwicklungen waren übrigens schon im Jahr 2011 von Kazuhiko Kakuta in Japan gezeigt worden.

Im Oktober 2014 wird berichtet, daß die National Science Foundation (NSF) einen Zuschuß in Höhe von 1,5 Mio. $ leistet, um die Entwicklung der mechanischen Fledermäuse zu fördern, die primär Baustellen überwachen sollen. Hutchinson arbeitet inzwischen mit den Professoren Soon-Jo Chung, Timothy Bretl und Mani Golparvar-Fard an seiner Universität sowie mit Kenneth Breuer and Sharon Swartz von der Brown University zusammen, die einen zusätzlichen NSF-Zuschuß in Höhe von 700.000 $ bekommen. Das Team erwartet nun, bis Ende des nächsten Sommers einen Prototypen vorstellen zu können.
Tatsächlich dauert es aber beträchtlich länger. Erst im Mai 2016 ist zu erfahren, daß ein UIUC-Forscherteam um Alireza Ramezani mit Hilfe eines 3D-Druckers und einer Schicht Silikonhaut als Flügelmembranen eine fliegende Roboter-Fledermaus konstruiert hat, die nur 92 g wiegt. Um das Flattern und die Stellung der Flügel zu kontrollieren, gibt es fünf Motoren, während Sensoren und ein Onboard-Mikroprozessor dem Fluggerät erlauben, im Raum zu navigieren.

Im Februar 2017 folgt die Meldung, daß die UIUC-Forscher zusammen mit Kollegen des California Institute of Technology die bisherigen Arbeiten zum Bau eines Roboters mit flexiblen Flügeln genutzt haben, der einer Fledermaus ähnelt und deren komplizierte Flugmanöver nachahmen kann.
Der inzwischen 93 g schwere Roboter mit einer Flügelspannweite von ca. 30 cm wird B2 genannt, was für die zwei B in BatBot steht. Seine Flügel schlagen mit niedrigen Frequenzen (7 – 10 Hz, im Unterschied zu 100 – 300 Hz bei Quadrokoptern) und sind grundsätzlich sicher. Sie können daher miteinander oder mit Hindernissen in der Umgebung kollidieren, ohne nennenswerten Schaden anzurichten.
Die flexiblen aus Silikon gefertigten und lediglich 56 µm dünnen Flügel stellen eine zentrale Herausforderung dar, da sie ständig ihre Gestalt verformen und noch dazu unabhängig voneinander kontrolliert werden müssen. Die volle Beweglichkeit von Fledermausflügeln nachzubilden, die mit ihrem komplexen System aus Muskeln und Knochen über mehr als 40 Freiheitsgrade verfügen, ist für den B2 noch nicht möglich, weshalb die Zahl auf neun (fünf aktive und vier passive) Glieder reduziert wird.
Trotz dieser reduzierten Ausstattung zeigt der Roboter bemerkenswerte Flugeigenschaften. Ausgestattet mit Inertialsensoren und einem Main Control Board, kann er autonom sowohl geradeaus fliegen, als auch steile Kurven und Sturzflüge absolvieren. Um die Richtung des Roboters zu steuern, wird erstmals mit einer asymmetrischer Faltung der Hauptflügel gearbeitet. Als mögliche Einsatzfelder der Technologie nennen die Forscher die Inspektion von Großbaustellen oder die Unterstützung bei Rettungsarbeiten. Außerdem soll der Roboter helfen, das Geheimnis der Fledermäuse noch weiter zu lüften.
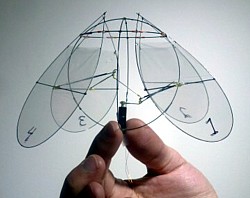
Aus Japan kommt im Februar 2013 die Meldung über einen weiteren Ornithopter
– ein Flieger, der sich durch das Schlagen seiner Tragflächen fortbewegt.
Die Firma Flapping Wing Production Studio aus Osaka
entwickelt die Meganeuropsis Drohne seit 2009 und
zeigt nun das Video eines erfolgreichen Fluges.
Der Name bezieht sich auf die Meganeura genannte prähistorische Libelle – obwohl dem Ornithopter noch einiges an deren Anmut fehlt. Angetrieben wird der 2,6 g leichte und 15,5 cm lange Flieger, der eine Spannweite von 40 cm hat, von einem Gummiband. Das ultraleichte Teil ist aus einfachsten Materialien gebaut, die mechanischen Elemente werden mit einem 3D-Drucker hergestellt.
Ein zweites Modell, das im August vorgestellt wird, ist der Firma zufolge mit einer Länge von 25 cm und einer Spannweite von 76 cm größer als alle bisherigen Schlagflügel-Drohnen – und mit einem Gewicht von nur 8,7 g, inklusive einer 50 mAh Li-Po-Batterie, gleichzeitig auch leichter als jede andere Drohne auf dem Markt. Bewegt wird es durch einen 6 mm langen Motor an der Frontseite, der die Flügel zum Schlagen bringt, und einem 4 mm Motor, der einen einzelnen Heckrotor antreibt, um den Drehmoment zu kompensieren, ähnlich wie ein Hubschrauber stabilisiert wird.
Interessant ist, daß sich auch mehrere Ornithopter zu einer Konfiguration mit der Bezeichnung Flying Crawler verbinden lassen, wie man auf den Außenaufnahmen sehen kann, wo einmal drei, und einmal sogar vier aneinander gekoppelte Schlagflügler durch die Luft flattern.
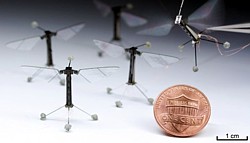
Im März 2013 meldet das Forschungsteam des Harvard
Microrobotics Laboratory der Harvard John A. Paulson School of Engineering
and Applied Science (SEAS) und des Wyss Institute for Biologically Inspired
Engineering an der Harvard
University sowie der Northeastern University,
das im Februar des vergangenen Jahres die mikro-elektromechanische Monolithic
Bee gezeigt hatte, daß man jetzt einen signifikanten
Fortschritt gemacht habe, denn nun sei es möglich, auch das Abheben
der Drohne zu steuern. Diese kann außerdem in der Luft auf der Stelle
stehen und grundlegende Flugmanöver ausführen. Dabei kommt sie mit 19
mW auf dieselbe Leistung wie eine Stubenfliege.
Die inzwischen RoboBee genannte und 0,08 g leichte Kunstfliege soll aufgrund ihrer Länge von nur 2 cm die kleinste fliegende Drohne der Welt sein. Die Flügel mit einer Spannweite von 3 cm schlagen 120 Mal pro Sekunde und erlauben es der Kleinstdrohne in der Luft an der gleichen Stelle zu schweben oder auch sehr langsam zu fliegen. Dies geschieht durch zwei Steuerantriebe unter den Flügeln, mit denen sich die Neigung und Richtung beim Starten kontrollieren bzw. bestimmen lassen.

Ein sehr wichtiger Schritt steht allerdings noch aus, denn bislang muß die Energie durch einen Draht zugeführt werden. Um tatsächlich autonom zu fliegen muß daher noch eine on-Bord-Versorgung entwickelt werden. Gedacht wird an Solarzellen und Akkus, welche die künstlichen Bienen innerhalb von 50 Minuten aufladen und 18 Stunden Flugzeit garantieren sollen. Zum Einsatz kommen sollen die mechanischen Bienchen dann nicht bei der Spionage, sondern auch bei Such- und Rettungsaktionen, der Überwachung besonderer Gebiete, der Verkehrsüberwachung oder zur hochauflösenden Wetter- und Klimabeobachtung.
Im Oktober 2015 folgen Berichte, denen zufolge die im Pop-Up-Verfahren aus Titan, Keramik und Klebefolien hergestellten Drohnen nun auch schwimmen können. Treffen die RoboBees auf die Wasseroberfläche und tauchen unter, können sie sich per Schwimmbewegung fortbewegen, und dies komplett automatisch. Erreicht wird die Anpassung, indem die Flügelschlagfrequenz in der Luft von 120 Hz im Wasser auf 9 Hz reduziert wird. In einem nächsten Schritt sollen sich die Drohnen auch wieder aus dem Wasser heraus katapultieren und so wieder in den Flugmodus kommen, was allerdings einer Menge Kraft bedarf.

Im Mai 2016 erscheint die Meldung, daß die Harvard-Forscher dem winzigen fliegenden Roboter zwischenzeitlich beigebracht haben, zum Krafttanken unterwegs Pausen einzulegen, indem er sich auf ausgeklügelte Weise an Oberflächen haftet. Während der Pause verbraucht das innovative Gerät 1.000 mal weniger Energie als unterwegs in der Luft. Die Inspiration dazu kam von Bienen, die ebenso wie andere Insekten Wände hochlaufen und sich unter Blättern kopfüber festsetzen können.
Das Anhaftsystem für verschiedene Oberflächen wie Glas, Holz oder Blättern funktioniert mittels Elektrostatik, ähnlich wie ein statisch aufgeladener Luftballon, allerdings ohne allmählich die Haftung zu verlieren. Von dem aktuellen Gesamtgewicht in Höhe von 84 µg nimmt der kleine Halterungsmechanismus am Kopf 13,4 µg in Anspruch. Um die elektronische Biene vor einem allzu harten Aufprall zu schützen, ist er mit Schaumstoff unterlegt. Zum Ablösen schaltet sich die Stromversorgung der Halterung ab.
Die Mikro-Drohne hängt gegenwärtig noch an feinsten Stromkabeln, soll aber irgendwann eine winzige Batterie erhalten, was den Wissenschaftlern zufolge jedoch noch 5 – 10 Jahre erfordern wird.
Da das Gerät nur mit dem Kopf andocken und deshalb ausschließlich an Unterseiten von Gegenständen oder an Raumdecken aufsetzen kann, wird an einer entsprechenden Weiterentwicklung gearbeitet. Und tatsächlich kann schon im Juni gezeigt werden, wie die RoboBee mit ihren vielen Füßchen an einer senkrechten Fläche landet – und auch dort sicher haften bleibt.
Zusätzlich zur Rolle als Aufklärungs- und Kommunikationsroboter, hoffen die Forscher jetzt, die Kunstbiene eines Tages auch als Roboter-Bestäuber einsetzen zu können, was durch das seit Jahren andauernde Sterben echter Bienenschwärme zunehmend an Wichtigkeit gewinnt.
Einem Bericht vom Oktober 2017 zufolge ist zwischenzeitlich gelungen, das Problem zu lösen, wie sich die Drohne aus dem Wasser heraus katapultiert. Die Vorgängerversion war so leicht, daß sie, einmal im Wasser, von der Oberflächenspannung festgehalten und an der Oberfläche gefangen blieb.

(2017)
Durch Änderung des Fahrzeugdesigns kann die neueste Version des Roboters mehr als das Dreifache der Nutzlast der vorherigen RoboBee heben – und sich dank vier schwimmender Ausleger und einer zentralen Gassammelkammer von der Oberfläche lösen. Die Kammer bietet genug Auftrieb, daß die Flügel über die Oberfläche geschoben werden, wo die Abstützungen für Stabilität sorgen. Derweil wandeln elektrolytische Platten in der Kammer gesammeltes Wasser in brennbares Knallgas um. Ein Funken in der Kammer zündet dann das Gas und treibt den Roboter aus dem Wasser.
Die zusätzliche Nutzlastkapazität erlaubt es, die Geräte einschließlich der Gaskammer, der elektrolytischen Platten, des Funkenerzeugers und der schwimmenden Abstützungen zu tragen, was das Gesamtgewicht des Hybridroboters auf 175 µg bringt. Den anhaltenden Flug – wenn er wieder in der Luft ist – kann er bislang aber noch nicht wieder aufnehmen.
Im Dezember folgt die Meldung, daß ein Ingenieurteam der Cornell University um Prof. Silvia Ferrari mit einer neuen Art von Programmierung experimentiert, welche die Funktionsweise des Gehirns eines Insekts nachahmt, damit sich die RoboBees wie echte Insekten autonom verhalten. Dafür sollen neuromorphe Computerchips eingesetzt werden. Die Arbeit wird mit einem vierjährigen Zuschuß in Höhe von 1 Mio. $ vom Office of Naval Research gefördert.
Wie eine ungewöhnliche Mutation sieht die solarbetriebene Version der RoboBee aus, die im Juni 2019 gezeigt wird. Nach zwei Jahrzehnten der Entwicklung ist ist es Prof. Robert Wood, dem Hauptforscher des Robobee-Projekts, und seinem Team endlich gelungen, die Problematik des Antriebs zu lösen, da der Kompromiß zwischen Masse und Leistung in kleinen Maßstäben, wo der Flug von Natur aus ineffizient ist, äußerst problematisch ist.

(2019)
Da selbst die kleinsten kommerziell erhältlichen Batterien viel mehr wiegen als der Roboter selbst, mußten Strategien entwickelt werden, um statt dieser die Fahrzeugeffizienz erhöhen, extrem leichte Stromkreise zu schaffen und hocheffiziente Solarzellen zu integrieren – womit die neue RoboBee zum weltweit leichtesten Fahrzeug wird, das jemals einen kontinuierlichen, fesselungsfreien Flug erreicht.
Zu den wichtigsten vorgenommenen Änderungen bei dieser jüngsten Iteration der RoboBee gehört die Hinzufügung eines zweiten Flügelpaares, der den Mikroflieger effizienter macht, ihm mehr Auftrieb gibt und erlaubt, Solarzellen und einen Elektronikschaltkreis anzubringen, ohne mehr Leistung zu verbrauchen – und endlich das Stromkabel zu kappen, das die RoboBee lange gefesselt hielt. Die neue Flügelkonstellation bringt der neuen RoboBee aber auch den Spitznamen ‚X-Wing‘ ein, nach den vierflügeligen Sternenjägern aus Star Wars.
Ganz so leicht, wie es sich anhört, ist die Umsetzung aber nicht. Da die kleinsten kommerziell erhältlichen Solarzellen jeweils 10 mg wiegen und bei voller Sonnenintensität 0,76 mW/mg Leistung liefern, benötigt der RoboBee X-Wing zum Fliegen die Kraft von etwa drei Erdsonnen, was die Forscher im Labor mit Halogenlampen simulieren. Ein Flug im Freien ist vorerst also nicht möglich.
Die Solarzellen, die etwa 3 cm über den Flügeln sitzen, um Störungen zu vermeiden, sind mit einem Schaltkreis unter der Biene verbunden, der die Niederspannungssignale der Solaranlage in Hochspannungs-Antriebssignale umwandelt, die zur Bewegung und Steuerung der Aktoren benötigt werden. Insgesamt wiegt die RoboBee mit den Solarzellen und der Elektronik 259 mg (etwa ein Viertel einer Büroklammer) und verbraucht rund 120 mW Leistung, also weniger, als eine einzelne Glühbirne an einer Kette von LED-Weihnachtslichtern.
Das Harvard Office of Technology Development hat derweil ein Portfolio an geistigem Eigentum (IP) im Zusammenhang mit dem Herstellungsprozeß von Geräten im Millimeterbereich entwickelt, das auf Mikrorobotik, medizinische Geräte, Unterhaltungselektronik und eine breite Palette komplexer elektromechanischer Systeme angewandt werden kann. Die Forscher, die von der National Science Foundation und dem Office of Naval Research unterstützt werden, wollen als nächstes versuchen, die benötigte Leistung zu reduzieren und die Bordsteuerung zu erweitern, damit die RoboBee nach draußen fliegen kann.

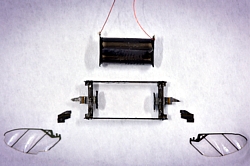
Im November 2019 wird berichtet, daß der Anblick einer RoboBee, die gegen eine Wand oder einen Glaskasten kracht, bei den Forschern keine Panik mehr auslöst, da zwischenzeitlich eine elastische RoboBee entwickelt werden konnte, die von weichen künstlichen Muskeln angetrieben wird und daher gegen Wände prallen, auf den Boden fallen und mit anderen RoboBees kollidieren kann, ohne beschädigt zu werden. Es ist der erste Mikroroboter, der von weichen Aktuatoren angetrieben wird und trotzdem eine ausreichend hohe Leistungsdichte und Steuerbarkeit erreicht, um einen kontrollierten Schwebeflug zu erzielen.
Um das Problem der Leistungsdichte zu lösen, übernehmen die Forscher die elektrisch angetriebenen weichen Aktoren, die im Labor von Prof. David Clarke am SEAS entwickelt wurden und aus dielektrischen Elastomeren hergestellt sind, welche sich beim Anlegen eines elektrischen Feldes verformen. Durch die Verbesserung der Elektrodenleitfähigkeit gelingt es, den Aktor bei 500 Hertz betreiben, was den zuvor verwendeten starren Aktoren entspricht.
Das Roboterteam des Wyss-Instituts und des SEAS baut verschiedene Modelle der RoboBee mit weichem Aktuatorantrieb. Hier abgebildet ist ein vierflügeliges Modell mit zwei Aktuatoren und ein achtflügeliges Modell mit vier Aktuatoren, wobei letzteres der erste mit einem weichen Aktuator angetriebene fliegende Mikroroboter ist, der einen kontrollierten Schwebeflug durchführt.
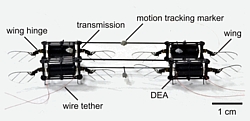
Aerial Robot
Die Aktoren mit dem weichen Mechanismus, der die Haltbarkeit deutlich erhöht, tauchen wieder im Februar 2021 in einer im Netz einsehbaren Veröffentlichung auf, an der Wissenschaftler des Massachusetts Institute of Technology (MIT), der Harvard University und der City University of Hong Kong beteiligt sind (‚Collision Resilient Insect-Scale Soft-Actuated Aerial Robots With High Agility‘). Das Team um Prof. Kevin Yufeng Chen nutzt Aktuatoren in Form dünner Gummizylinder, die mit Kohlenstoffnanoröhrchen beschichtet sind.
Wenn eine Spannung angelegt wird, erzeugen die Nanoröhren eine elektrostatische Kraft, die den Zylinder zusammendrückt und streckt. Wird die Spannung abgeschaltet, zieht sich der Zylinder wieder in seinen Ausgangszustand zusammen. Durch schnelles Ein- und Ausschalten des elektrischen Stroms dehnt sich der Aktuator aus und zieht sich zusammen, wobei er die angebrachten Flügel fast 500 Mal pro Sekunde schlägt.
Der derzeitige Prototyp besteht aus vier Sätzen von Flügeln und Aktuatoren, die in einem rechteckigen Rahmen zusammengefügt sind. Er wiegt gerade einmal 0,6 g, was in etwa dem Gewicht einer Hummel entspricht. Allerdings ist er noch immer mit einer externen Stromquelle verdrahtet. Die Wissenschaftler hoffen, durch die Senkung des Energiebedarfs irgendwann mit einer kleinen Bordbatterie auskommen zu können.
Die Entwicklung geht weiter, und das Team um Prof. Chen veröffentlicht im Dezember 2021 ein neues Video, auf dem darüber berichtet wird, daß die hochtechnische Herstellungstechnik, die aus weichen Aktoren, Elastomeren und Spannungsverteilern besteht, zwischenzeitlich so verfeinert wurde, daß sie die Produktion künstlicher Muskeln mit weniger Defekten ermöglicht. Als Resultat können die federleichten Mikroroboter erstmals die nötige Leistungselektronik mit sich führen, die es ihnen ermöglicht, aus eigener Kraft zu fliegen.
Die Forscher hatte herausgefunden, je größer die Oberfläche des Aktuators ist, desto weniger Spannung ist erforderlich. Es gelingt ihnen, einen Aktor mit 20 Schichten zu entwickeln, von denen jede nur 10 µm dick ist. Darüber hinaus optimieren sie die dünnen Elektroden aus Kohlenstoff-Nanoröhrchen, um die Leistung des Aktuators zu erhöhen und die Spannung zu verringern.
Die daraus hergestellten weichen Aktuatoren arbeiten mit einer um 75 % niedrigeren Spannung als die bisherigen Versionen und können gleichzeitig 80 % mehr Nutzlast tragen. Darüber hinaus kann die Leistung des Aktuators mehr als verdreifacht und die Lebensdauer des Mikroroboters deutlich verbessert werden. Die Forscher hoffen nun, die Dicke des Mikroroboters auf einen Mikrometer reduzieren zu können, um so weitere Anwendungsmöglichkeiten für den insektengroßen Roboter zu finden.
Im März 2023 folgt ein Bericht des MIT-Teams, das inzwischen ein Verfahren entwickelt hat, mit dem die fliegenden Roboter schwere Schäden an ihren künstlichen Muskeln selbständig reparieren können. Da die Flügel aus Elastomerschichten bestehen, die zwischen zwei hauchdünnen Elektroden eingeklemmt sind, und zu flattern beginnen, wenn eine Spannung angelegt wird, können Schäden durch Anlegen einer höheren Spannung repariert werden.
Dieser Effekt ist zwar nicht neu, doch das Team hat ihn optimiert, indem als Elektroden Kohlenstoffnanopartikel eingesetzt werden, superstarke, aber extrem kleine Moleküle, die die Form von Röhren haben. Dabei galt es, die Menge an Kohlenstoffmolekülen zu reduzieren, um den Energiebedarf für die Reparaturen zu senken. Letztlich können die Winzlinge auch mit perforierten Flügeln noch fliegen.
Die RoboBee erscheint ein weiteres mal im Mai in der Presse, als das Team der WSU ein neues Video veröffentlicht, das zeigt, daß die Bee++ inzwischen drei Flugmanöver beherrscht: Nicken, Rollen und Gieren. Zudem wurde die Frequenz des Flügelschlags von 100 auf 160 Bewegungen pro Sekunde erhöht, was die Beweglichkeit des künstlichen Insekts stark verbessert.
Zur Erinnerung: Das Harvard Microrobotics Lab. hatte 2012 eine ähnliche Monolithic Bee (oder Mobee) vorgestellt, während die Firma senseFly 2013 mit einem eBee UAVs genannten Modell auftrat. Forscher der University of Southern California (USC) stellen dann im Mai 2019 einen weiteren winzigen Insektenroboter namens Bee+ vor.
In Zusammenhang
mit der o.e. künstlichen Bestäubung ist noch zu
erwähnen, daß seit Mai 2014 ein
Video von Polynoid und Greenpeace mit
(animierten) Roboterbienen kursiert, das auf den dramatischen Rückgang
der echten Insekten aufmerksam machen soll. Die Liste der unterstützenden
Firmen wie BASF, Bayer, DuPont, Syngenta u.a. impliziert aber eher, daß
die Roboterbienen als einfaches Mittel zur Erhaltung kurzfristig profitabler
und umweltschädlicher Landwirtschaftsmethoden betrachtet werden – und
dies anscheinend auch von Greenpeace so gesehen wird.
Das deutsche Unternehmen Festo profiliert sich immer
wieder mit überraschenden, neuen technischen Entwicklungen – wie z.B.dem
im März 2011 vorgestellten SmartBird (s.d.).
Nun, genau zwei Jahre später, wird eine erstaunlich naturgetreue, fernsteuerbare
Libelle namens BionicOpter gezeigt.

Wie das natürliche Vorbild, das allein durch eine Veränderung des Flügelschlags von der Vorwärtsbewegung zum Stillstand und zurück wechseln kann, ohne dabei die eigene Lage zu verändern, kann auch die künstliche Libelle in alle Raumrichtungen manövrieren, auf der Stelle fliegen und ganz ohne Flügelschlag segeln. Daß sich alle vier Flügel individuell in Schubrichtung und Schubstärke einstellen lassen, erlaubt dem mechanischen Flieger nahezu jede Lageorientierung im Raum einnehmen zu können.
Das unglaublich komplexe, ultraleichte Flugobjekt hat eine Spannweite von 63 cm, eine Körperlänge von 44 cm und wiegt nur 175 g. Indem elektrischer Strom durch vier ,Nitinol-Muskeln’ des Roboters geleitet wird, kann dessen Kopf von Seite zu Seite, und sein Schwanz auf und ab bewegt werden. Eine Flugstabilität wird durch die automatische Echtzeit-Korrektur von Flugvibrationen gewährleistet. Die zwei Li-Po-Batterien, neun Servomotoren, der ARM-Mikrocontroller sowie die Sensoren und Funkmodule sind alle im Brustbereich der mechanischen Libelle verbaut.

Ebenfalls im März zeigt die spanische Firma EXPAL, die
in erster Linie Systeme und Dienstleistungen für die Verteidigungs- und
Sicherheitsindustrie entwickelt, produziert und integriert, auf der internationalen
Fachmesse für Sicherheitstechnik HOMSEC 2013 in Madrid
eine Flugdrohne, die einen Raubvogel nachahmt.
Die ursprünglich als Vogelschlagwarnsystem entwickelte Aufklärungsdrohne Shepherd-MIL sieht aus wie eine natürlicher Vogel, und weist auch ähnliche Flugleistungen auf. Durch den geräuschlosen Elektromotor und das Gleit-Verhältnis sollen damit sensible Missionen still, unauffällig und fast unsichtbar durchgeführt werden können.
Der Kunstvogel ist mit Kameras und GPS-Software ausgestattet und eignet sich dem Unternehmen zufolge besonders für die Grenzüberwachung, die Brandbekämpfung, die Bekämpfung des Drogenhandels und ähnliches mehr.
Die Forschung an einem Robo Raven läuft an der University
of Maryland – und mit Geldern des U.S. Army Research Laboratory
– seit dem Jahr 2005, erste Testflüge können 2007 gemacht
werden.

Nachdem das Design im letzten Jahr einer grundlegenden Überarbeitung unterzogen wurde, kommt der mechanische Rabe seinen echten Vorbildern in Sachen Gewandtheit nun schon so nahe, daß echte Vögel darauf hereinfallen, wie ein im April 2013 veröffentlichtes Video zeigt. Einige werden sogar von Raubvögeln attackiert. Was verwunderlich ist, da der Flugroboter äußerlich kaum Ähnlichkeit mit einem lebenden Vogel hat.
Der Trick besteht darin, daß Vögel ihre Flügel unabhängig voneinander bewegen können. Deshalb wird jeder Flügel des Robo Raven von zwei unabhängigen Aktuatoren angetrieben und gesteuert. Hierdurch kann der Robotervogel mit einer speziellen Software lebensnahe Flatterbewegungen machen und die Flügeln auch verbiegen – genau wie echte Vögel.
Die Roboterkrähe ist ungefähr 60 cm lang und hat Hohlknochen aus 3D-gedruckten Kunststoffen. Dazu kommen Schaumstoffe, lasergeschnittene Polymerteile, karbonfaserverstärkte Kunststoffe sowie eine Folie aus Mylar, mit der die Flügel und der Schwanz überzogen sind.
Im Dezember stellt das Team dann eine neue Version des Robo Raven vor – mit in den Flügeln integrierten Solarzellen, die rund 3,6 W produzieren. Da der Vogel jedoch ca. 30 W benötigt, um zu fliegen, können die Zellen nur dabei helfen, die Batterien im stationären Zustand aufzuladen. Bis es zu einer Umsetzung kommen kann, müssen daher die Effizienz des Motors und der Zellen noch stark optimiert werden.
Forscher der britischen Firma Blue Bear Systems Research Ltd. in
Oakley, Bedfordshire, entwerfen und entwickeln Berichten vom April zufolge
einen künstlichen Vogel-Flügel mit veränderlicher Geometrie, der in einem
kleinen UAV eingesetzt wird. Das entsprechende 6-monatige Programm, das
auf der Vogelflugforschung an der Oxford University aufbaut,
wird vom Center for Defense Enterprise (CDE) finanziert.

Der Morphing-Flügel, der in dem UAV iMorph Anwendung findet, zeigt große Vorteile bei der Verringerung des Energieverbrauchs des Flugzeugs, der Stabilität gegenüber Windböen und der Zunahme der Geschwindigkeit, mit denen es fliegen kann.
Im September 2014 meldet Blue Bear, die 2009 aus dem schon mehrfach erwähnten britischen Rüstungskonzern QinetiQ hervorgegangen ist, daß man gemeinsam mit der University of Bristol ein neues Konzept eingeführt habe, das den Einsatz von UAVs unter schwierigen Bedingungen automatisiert.
Das im Laufe von zwölf Monaten entwickelte Smart Boomerang genannte System besteht aus zwei Kameras und einem Computer (aus einem Handy) und ermöglicht es den UAVs, eine Route zu lernen und den Weg automatisch zurückzukehren, auch wenn zum Beispiel das GPS-Signal verloren geht. Dem technischen Programmleiter Richard Bostock zufolge hätten bereits Firmen wie BP und EasyJet sowie die Atomanlage Sellafield Interesse an dem System bekundet.

Einem Bericht vom Juli 2015 zufolge führt die Firma einen gemeinsam mit der Firma Createc, einem Spezialisten für intelligente Sensoren, neu entwickelten Quadrokopter mit dem Namen RISER (Remote Intelligent Survey Equipment for Radiation) ein, der mit der N-Visage 3-D Strahlungs-Mapping-Software von Createc sowie einem Gammastrahlen-Spektrometer ausgerüstet ist. Damit sollen die kerntechnischen Anlagen in Großbritannien auf Kontaminationen untersucht werden. Ein weiteres Fluggerät der Blue Bear ist ein Starrflügler namens iSTART.
Im September wird bekannt, daß die Firma mit der britischen Charterfluggesellschaft Thomas Cook Airlines zusammenarbeitet, um deren Airbus A330 Flugzeuge mittels Drohnen zu untersuchen, die sich ohne Leitern oder Kräne leicht rund um das Flugzeug bewegen können.
Zudem werden schon seit dem März 2014 gemeinsame Versuche mit der Fluggesellschaft EasyJet und dem Bristol Robotics Laboratory (BRL) durchgeführt, da EasyJet plant, bis Ende 2016 europaweit in zehn Wartungsbasen Drohnen einzusetzen, um die 220 Airbus-Flugzeuge der Flotte zwischen den Flügen schneller und effizienter auf äußere Schäden zu kontrollieren.
Für die schnelle Flugzeug-Inspektion wird der 1 m2 große und rund 4 kg schwere RISER mit einer starken Beleuchtung und einer HD-Kamera bestückt. Damit wird die Außenhaut der Flugzeuge auf Blitz-Schäden kontrolliert, kleine Brandflecken und Löcher, die überall auftreten können, von den Flügelspitzen bis zum Heck. Außer Blitzschäden sollen die Drohnen auch Schäden durch Hagelschlag oder den Zusammenstoß mit Vögeln entdecken.
Zur Navigation im Innenbereich (wo GPS nicht verfügbar ist) nutzt er ein Lasersystem und eine Kollisionsvermeidungs-Software. Die Entwicklung wird von Blue Bear selbst finanziert, mit Unterstützung von EasyJet und Thomas Cook.
Später befaßt sich Blue Bear mit der Steuerung von Drohnen-Schwärmen im militärischen Umfeld, mit dem Einsatz von Drohnen zur G5-Abdeckung, und ab dem Januar 2021 mit dem Air Druids genannten Programm für medizinische Lieferungen mittels Drohnen (Autonomous Intelligent Robotic DRones for Unmanned Integrated Delivery System).

(Modell)
Außerdem gründet Blue Bear in diesem Monat in siebenköpfiges Konsortium, um im Rahmen des 24-monatigen Projekts ‚Integrated Flight Control, Energy Storage and Propulsion Technologies for Electric Aircraft‘ (InCEPTion), das vom britischen Aerospace Technology Institute (ATI) und Innovate UK unterstützt und kofinanziert wird, ein rein elektrisches, leises und effizientes Antriebsmodul der nächsten Generation entwickelt werden. Dem Konsortium gehören neben Blue Bear die Unternehmen Dowty Propellers, Drive System Design, Ricardo und M&I Materials sowie die Universitäten Cambridge und Salford an.
Das Antriebsmodul wird skalierbar sein, so daß verschiedene Kombinationen desselben Moduls mehrere Flugzeugkonzepte antreiben können, z.B. große Frachtdrohnen, eVTOL-Drohnen oder sogar subregionale Flugzeuge.
Blue Bear ist auch Mitglied des im Oktober 2021 gebildeten Konsortiums The Airspace of the Future (AoF), dem auch Thales, die Universität Cranfield, Cranfield Airport Operations, Inmarsat, Altitude Angel, die Ocado Group, Satellite Applications Catapult und Connected Places Catapult angehören. Diese Gruppe, die sich für die Integration von Drohnendiensten in das britische Verkehrssystem einsetzt, wurde als Reaktion auf die Future Flight Challenge (FFC) von UK Research and Innovation (UKRI) im Jahr 2019 gegründet (s.d.).
Auf der International Conference on Robotics and Automation (ICRA), die
in diesem Jahr im Mai in Karlsruhe stattfindet, stellen Forscher der Stanford
University den Prototyp eines winzigen Luftfahrzeugs vor,
das wie ein fliegender Fisch springen und gleiten kann, und dies über
eine größere Entfernung als es ein gleichstarker Sprung-Roboter könnte.
Der 30 g schwere Jumpglider hebt mittels einer Carbonfeder ab, wobei die Schwenkflügel während des Aufstiegs aus dem Weg bleiben, dann aber mit einer Spannweite von 70 cm einrasten und den Weg nach unten zu einem Gleiten machen.
Anzumerken wäre, daß der koreanische Ingenieur Haecheon Choi von der Seoul National University bereits 2010 eine längere Untersuchung über die erstaunlichen Leistungen der fliegende Fische veröffentlicht hatte, die mehr als 40 Sekunden lang in der Luft bleiben und dabei über 100 m zurücklegen, wobei sie eine Geschwindigkeit von bis zu 70 km/h erreichen.
Choi will die Erkenntnisse, die sich bei den Tests mit Fischmodellen im Windkanal ergeben haben und die Nutzung des Bodeneffekts (in diesem Fall auf einem Wasserbett statt einem festen Boden) belegen, nun auch praktisch anwenden, um ein Flugzeug nach dem Vorbild der fliegenden Fische zu bauen.
Berichten vom Juni 2013 zufolge wird auch an der University
of Florida daran gearbeitet, winzige unbemannte Flugzeuge zu
entwickeln, die mit einem Hurrikan umherfegen, um Daten über
die Stärke und den Pfad des Sturms zu sammeln.

Der aktuelle Prototyp von Prof. Kamran Mohseni ist 15 cm lang und besteht aus stabiler Kohlenstoff-Faser. Derzeit kostet er etwa 250 $, was sich aber erheblich verringern wird, wenn die Drohnen erst einmal in Massenproduktion hergestellt werden. Schließlich sollen sie zu Dutzenden oder sogar zu Hunderten per Fernzugriff über einen Laptop gestartet werden, in sicherer Entfernung zum Hurrikan.
Mit ihren Sensoren sammeln und übermitteln sie Daten wie Druck, Temperatur, Feuchtigkeit, Ort und Zeit. Außerdem sollen die Flugzeuge in der Lage sein, miteinander ein drahtloses Daten-Sharing-Netzwerk zu bilden, so daß einzelne Flugzeuge ihren Kurs ändern, falls nötig, um eine bessere Abdeckung des Sturms zu erzielen. Um auch Sensoren für die Entstehungsorte der gewaltigen Wirbel auf offener See zu haben, wird parallel an ebenso aufgebauten Mini-U-Booten gearbeitet, die dann vermutlich ebenfalls elektrisch betrieben werden. Feldtests in einem realen Hurrikan sollen innerhalb von zwei bis drei Jahren erfolgen.
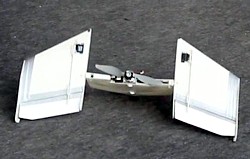
Etwas befremdlich wirkt eine Drohne, deren Video sich im Juli weit verbreitet.
Der DALER (Deployable Air Land Exploration Robot)
der Eidgenössischen Technischen Hochschule (EPFL)
in Lausanne ist eine Mischung aus Drohne und Roboter – und kann sich
sowohl in der Luft als auch auf dem Boden fortbewegen. Dabei nutzt
das Produkt der adaptiven Morphologie, das auf die Suche und Rettung
von Katastrophenopfern zielt, für seine multimodale Fortbewegung nur
seine Flügel.
In der Luft als Nurflügeler mit einer Druckschraube im Heckteil als Antrieb unterwegs, werden die Seitenteile des Flügels auf dem Boden zu Beinen (Whegs = Wheel-Legs bzw. Wing-Legs), und damit die Flug- zu einer Laufdrohne. Hier geschieht die Fortbewegung, indem die über eine Achse mit dem Rumpf verbundenen Flügel durch einen Motor gedreht werden.

DALER
Dadurch kann sich der der Flugroboter am Boden mit einer Geschwindigkeit von etwa 6 cm/s vorwärts bewegen, bei einem maximalen Schrittabstand von rund 6 cm. Im Flug, bei dem eine maximale Geschwindigkeit von etwa 70 km/h erreicht werden kann, wird der drehbare Teil der Flügel mit einer Sperre gesichert.
Die kriechende Fortbewegung sieht zwar nicht unbedingt elegant aus, ist dafür aber recht effektiv: Der Roboter kommt mit unterschiedlichen Untergründen zurecht und kann auch relativ hohe Hindernisse überwinden.
Im nächsten Schritt wollen EPFL-Wissenschaftler um den Doktoranden und Teamleiter Ludovic Daler die Flügel so weiterentwickeln, daß sie auch in der Luft die Form ändern können. Ihre Fläche könnte beispielsweise verkleinert werden, um besser über den Boden kriechen zu können.
Tatsächlich ist im Januar 2015 zu erfahren, daß die von der Vampir-Fledermaus Desmodus rotundus inspirierte Drohne, deren Vorbild die Spitzen der Flügel wie Beine verwendet, zwischenzeitlich eine verformbare und einziehbare Flügelmorphologie aus weichem Stoff besitzt, die sich am Boden kleinräumig zusammenfaltet und um ein Scharnier dreht, das die Whegs am Korpus befestigt.
Mögliche zukünftige Entwicklungen der Drohne, die sich noch im Prototypenstadium befindet, sollen eine Schwebefähigkeit beinhalten sowie die Fähigkeit, nach einer Mission autonom vom Boden abzuheben und automatisch zur Basis zurückzukehren.
Auf der weltgrößten Messe für Drohnen, der im August stattfindenden dreitägigen
Unmanned Vehicle Systems International in Washington, befindet sich
unter den Exponaten eine Drohne, die auf sehr ungewöhnliche Weise startet.
Der Bird’s Eye der Firma Bird Aerospace LLC aus
Fayetteville, North Carolina, wird nämlich durch eine pyrotechnische
Ladung auf eine Höhe von rund 75 m katapultiert. Dabei schießt eine
Art Kanone einen eiförmigen Kanister hinauf, aus dem die gefaltete
Drohne dann ,schlüpft’ und sich zu einem Nurflügler aufspannt.
Das System ermöglicht einen schnellen und einfachen Start auch in beengten Situationen, dichten Wäldern oder schroffen Gelände und soll sowohl zivil als auch militärisch eingesetzt werden. Die mit High-Definition-Sensoren ausgestattete Drohne hat eine Reichweite von 40 km und kann bis zu 3 Stunden in der Luft bleiben.
Auf derselben Messe wird auch eine Drohne vorgestellt, die hier nur ausnahmsweise
erscheint – da sie mit einem normalen Benzinmotor betrieben wird.

Der Nimbus EOS XI wird jedoch von der Firma Tunisia Aero Technologies Industries hergestellt – dem möglicherweise einzigen arabischen echten Luftfahrtunternehmen! Als Blimp-ähnlicher Gleiter sei er fast geräuschlos und für die Überwachung großer Gebiete gedacht, dabei aber auch kräftig genug, um ein Banner hinter sich herziehen zu können.
Die Firma entwickelt und produziert das unbemannte Flugsystem auf Basis einer innovativen und patentierten Idee namens Metaplano. Dabei kombiniert das Hybrid-Flugzeug aus Hängegleiter, Ultraleicht-Flugzeug und Luftschiff den statischen und den aerodynamischen Auftrieb, wie wir es schon bei anderen Entwicklungen gesehen haben. Zudem fliegt es mit nur 24 km/h, was es ideal für langsame und vorsichtige Vermessungen macht.
Die 54,3 kg schwere Drohne kann bis zu 90 Minuten lang fliegen, eine Höhe von 9.000 m über dem Meeresspiegel erreichen und auch Nutzlasten wie hochauflösende Kameras mit sich führen. Es bleibt zu hoffen, daß die Initiatoren in Tunesien irgendwann bemerken werden, daß dort manchmal die Sonne scheint - und daß auch mit deren Energie geflogen werden kann.
Ebenfalls im August hört man wieder etwas von dem unbemannten Elektroflieger Puma
AE der Firma AeroVironment.

Der Prototyp einer neuen, solarbetriebenen Variante übertrifft mit einer kontinuierlichen Flugzeit von neun Stunden und 11 Minuten den bisherigen Rekord von 9 Stunden aus dem Jahr 2009, der damals mit einem Hybrid-Brennstoffzellen-Modell erreicht wurde (s.d.). Zum Vergleich: Ein Standard Puma AE und vergleichbare Flugzeuge anderer Hersteller erreichen nur Flugzeiten von 2 Stunden.
Die Solarvariante ist mit ultra-dünnen Gallium-Arsenid-Solarzellen von Alta Devices bestückt, die aufgrund ihrer hohen Effizienz ausreichend Strom für den Langstreckenflug liefern, ohne das Gewicht des Flugzeugs signifikant zu steigern. Mit ihrer Energie verlängern sie außerdem die Ausdauer einer ebenfalls neu integrieren Langzeit-Batterie, die bereits die Flugzeit eines nicht-solaren Puma AE von zwei auf mehr als drei Stunden erhöht. Eine Produktionsversion der Solardrohne ist für Anfang 2014 geplant.
Ende August testet die Florida Keys Mosquito Control District (FKMCD)
Behörde eine von Condor Aerial entwickelte unbemannte
und mit Infrarotkameras ausgerüstete Flugdrohne, um jene Lachen aus
flachem Wasser zu erkennen, in denen sich Mückenlarven tummeln, so
daß das Wasser auf dem Boden mit Insektiziden behandelt werden kann.

Das einem Habicht ähnelnde (und im Jahr 2008 ursprünglich für militärische Anwendungen entwickelte) Maveric UAV besteht aus Kohlefaser-Verbundwerkstoffen, wiegt 1,13 kg, ist 70 cm lang, kann 90 Minuten lang in der Luft bleiben und ist standardmäßig mit 3 Bild-stabilisierten Kameras ausgerüstet.
Die Flügel mit einer Spannweite von 73,6 cm sind so flexibel, daß man die Drohne für den Transport einfach zusammenrollen kann.
Mit einer Steigegeschwindigkeit von 9 m/s kann die Drohne bis auf eine Flughöhe von 7.620 m steigen, im Normalflug wird eine Geschwindigkeit von 13 m/s erreicht. Der On-Board-Prozessor ist in der Lage, die visuellen Daten zur Kollisionsvermeidung auszuwerten. Welcher Batterien-Typ zum Einsatz kommt, ist nicht yu erfahren, nur daß die Ladezeit 30 Minuten beträgt.
In diesem Monat hört man auch erstmals etwas von der 2012 in
New Mexico von Vern Raburn gegründeten Firma Titan
Aerospace, die an einem riesigen, unbemannten Solarflugzeug
arbeitet. Das Modell Solara 50 soll in einer Höhe von
65.000 Fuß fliegen und dort die Rolle eines solarbetriebenen atmosphärischen
Satelliten übernehmen.

(Grafik)
Geplant ist, daß die große Drohne für fünf Jahre ununterbrochen in der Luft bleibt, was einer Missions-Reichweite von über 4 Millionen Kilometer entspricht. Der Start soll in der Nacht mit Strom aus der Batteriebank erfolgen. Hat das Flugzeug seine Position rund 20 km über der Erde eingenommen, werden die Li-Io-Batterien während des Tages wieder aufgeladen. Das On-Board-Management-System des fliegenden Satelliten sorgt für die Einhaltung der Spannung und der thermischen Grenzwerte in der Tieftemperatur-Atmosphäre auf dieser Flughöhe.
Das 160 kg schwere Solarflugzeug verfügt über eine Spannweite von 50 m, ist 15 m lang und kann eine Fluggeschwindigkeit von 104 km/h erreichen. Bestückt ist es mit 3.000 Solarzellen, die tagsüber 7 kW liefern. Zu den ins Auge gefaßten Anwendungen gehört u.a. die mobile Kommunikation, da das Systeme in der Lage wäre, eine Versorgung für über 17.800 km2 zu bieten, womit die einzelne Solara-Plattform eine größere Reichweite bietet als 100 terrestrische Mobilfunkmasten. Während das vorgestellte Modell Nutzlasten von ca. 32 kg tragen kann, soll ein Folgemodell Solara 60 über 100 kg an Geräten in einer atmosphärischen Parkposition halten können.

Kleinere Versionen der Solara UAVs hat Titan Aerospace bereits erfolgreich getestet, und das Unternehmen plant eigentlich, in weniger als einem Jahr den Verkauf operativer Systeme zu beginnen.
Weitere Informationen sind jedoch nicht zu finden – was sich daraus erklärt, daß Titan Aerospace im April 2014 von Google gekauft wird, zu einem nicht genannten Preis. Ebenso wird die Titan-Homepage vom Netz genommen und überhaupt das Google-übliche Schweigen kultiviert.
Noch einen Monat zuvor hatte es Medienberichte gegeben, denen zufolge Facebook über einen Kauf von Titan verhandeln würde, für einen Preis von etwa 60 Mio $. Stattdessen übernimmt das Onlinenetzwerk, das dabei mit Samsung, Nokia, Ericsson u.a. zusammenarbeitet, für rund 20 Mio $. den britischen Drohnenentwickler Ascenta Aerospace, der ebenfalls an solarbetriebenen Drohnen arbeitet. Bislang läßt sich darüber aber noch nicht viel herausfinden, die einzige Grafik ist hier wiedergegeben. Mehr gibt es erst 2015 zu erfahren (s.d.).

(Grafik)
Im Team der Ascenta Aerospace sind Fachleute die zuvor bei QinetiQ, Boeing, Honeywell und der Harris Corporation gearbeitet haben und an Projekten wie dem Breitling Orbiter Höhenballon sowie dem Bau von Prototypen des Zephyr beteiligt waren - der bis dato am längsten fliegenden solarbetriebenen Drohne der Welt (s. 2006, 2007, 2010). Facebook will mit dem neu geründeten Projekt internet.org günstige Internetzugänge in entfernte Regionen in Entwicklungsländern bringen.
Titan, nun unter den Fittichen von Google, soll den Suchmaschinengiganten ebenso dabei unterstützen, mehr Menschen weltweit über den Luftweg an das Internet anzuschließen. Außerdem soll Titan auch am Google-Projekt Loon for all mitarbeiten, das mit riesigen, gasgefüllten Ballons in der Stratosphäre, an denen solarbetriebene Relaisstationen angebracht sind, Internetanschlüsse bis in die entlegensten Ecken der Welt bringen will.
Hier beginnt im Juni 2013 ein Pilottest mit 30 Ballons, die von Neuseelands Südinsel gestartet werden und einer kleinen Gruppe von Pilot-Testern Internetzugang bieten. Nach Verbesserung der Technologie werden weitere Forschungsflüge in Kaliforniens Central Valley durchgeführt. Mehr darüber findet sich im Kapitelteil Solar-Luftschiffe und Solar-Ballone. Nun kann man gespannt sein, wie schnell Google die konkurrierende Solardrohnen-Technologie vorantreibt.

der TUBS
Im September hebt in Braunschweig das größte Papierflugzeug der
Welt ab, das Studenten der dortigen Technischen Universität in
mehr als 2.400 Stunden aus 70 Quadratmetern Papier, 200 Flaschen Sekundenkleber
und 500 Tuben Alleskleber gebastelt haben.
Nachdem ein erster Versuch im vergangenen November gescheitert war, übersteht der 5 m lange und 18 m breite Papierflieger namens Carolo Wilhelminchen diesmal seinen Jungfernflug in heilem Zustand – und erzielt damit einen Weltrekord, obwohl er nur eine Strecke von rund 18 m zurücklegt.
Um das 24 kg schwere Flugzeug überhaupt starten zu können, wird in einer Halle eine etwa 10 m lange und 2,40 m hohe Bühne aufgebaut, auf welcher der Flieger auch zusammengebaut wird. Dann heben acht Teilnehmer das Flugzeug hoch, und einer rennt mit dem Papierflieger los, um Schwung für den Flug zu geben.
Nach dem erfolgreichen Flug wird den glücklichen Teilnehmern die Urkunde des Guinness-Buches der Rekorde überreicht. Den alten Rekord hielt seit 1995 die niederländische Delft University of Technology. Dort hatten Studenten damals ein Papierflugzeug mit 14 m Spannweite fliegen lassen.
Im Oktober 2013 berichten die Fachblogs, das der Luftfahrt-Student Ved
Chirayath an der Stanford University die erste
autonome fliegende Drohne konstruiert hat, die speziell für die marinebiologische Korallenforschung gedacht
ist. Der mit Kameras ausgestatteten Quadrokopter war im Sommer genutzt
worden, um zusammen mit Stephen Palumbi vom Stanford
Woods Institute flache Wasserriffe in Amerikanisch-Samoa präzise zu kartieren
und zu messen.
Chirayath hatte zuvor eine optische Software namens Fluid Lensing entwickelt, welche die Verzerrungen durch Oberflächenwellen entfernt und die Auflösung erhöht – worauf ihn die NASA umgehend engagierte, um ein Satellitenkonzept zu entwickeln, das Ziele wie Vegetation und Ozeanströme auf der Erde sowie Ziele im Raum abbildet.
Als der junge Ingenieur von der weit verbreiteten Korallenbleiche und dem Mangel an genauen Riff-Karten erfährt, beschließt er, eine entsprechende Drohne zu konstruieren, um die benötigte Arbeit zu erledigen. Über die Forschung von Palumbi hinaus soll das Drohnenmaterial aber auch ein zweites Leben in der Kunst erhalten.
Das Projekt Reactive Reefs zielt darauf ab, die Zuschauer unter die Oberfläche des Ozeans zu transportieren und ihnen aus erster Hand zu vermitteln, wie sich die Korallenriffe der Welt infolge des natürlichen und menschlichen Drucks verändern. Die Ausstellung des multidisziplinären Studententeams wird zum ersten Mal im November 2014 auf dem IUCN World Parks Congress in Sydney, Australien, gezeigt.

Ebenfalls im Oktober 2013 bewährt sich das unbemannte Forschungsflugzeug ALADINA der Technischen Universität Braunschweig im Praxistest zur Untersuchung und Messung von Luftpartikeln bis in 1.000 m Höhe. Das von Wissenschaftler der Eberhard-Karls-Universität Tübingen und des Leibniz-Instituts für Troposphärenforschung (TROPOS) in Leipzig mit speziell angepaßten, sehr kleinen und leichten Meßgeräten ausgerüstete Fluggerät kann bei einer Forschungsstation in Melpitz bei Leipzig erfolgreich eine Meßkampagne absolvieren.
Zusätzlich zu ALADINA (Application of Light-weight Aircraft for Detecting In situ Aerosol) kommen in Leipzig auch weitere unbemannte Forschungsflugzeuge der Universität Tübingen zum Einsatz, die hochpräzise Messungen von Temperatur, Feuchte, Wind und Wärmeflüssen liefern. die Drohne ALADINA selbst ist ein unbemanntes Flugzeug vom Typ Carolo P360, das eine Spannweite von 3,60 m und ein Gewicht von 22 km hat. Es trägt eine Nutzlast bis zu 2,5 kg und fliegt mit einer Geschwindigkeit von bis zu 80 km/h. Der eingebaute Akku ermöglicht eine Flugzeit von rund einer halben Stunde.
Das Projekt scheint äußerst nachhaltig zu sein, denn auch viele Jahr später ist ALADINA noch im Einsatz. Diesmal wird im Projekt ULTRAFLEB (Ultrafeinstaubbelastung durch Flughäfen in Berlin) im Auftrag des Umweltbundesamtes (UBA) von November 2020 bis Ende 2024 analysiert, wie sich die Feinstaubbelastung durch die Eröffnung des neuen Flughafens BER verändert hat.

Die japanische Firma Hirobo Corp. aus Hiroshima, die
im vergangenen Jahr das Design eines elektrisch betrieben Kleinhubschraubers HX-1 für
eine Person vorgestellt hatte, präsentiert auf der International Robotics
Exhibition in Tokio im November unter dem gleichen Namen einen kräftigen,
unbemannten Elektro-Hubschrauber, der schon vor Ende des Jahres in
Produktion gehen soll.
Der vollständig autonome Hubschrauber soll in erster Linie als medizinisches Notfall- und Rettungsfahrzeug eingesetzt werden. Er kann für viele Zwecke konfiguriert werden, einschließlich Luftaufnahmen und Vermessungen, Such- und Rettungsmissionen, sowie den Transport von medizinischen Hilfsgütern, Organen oder Blutkonserven.
Der HX-1 hat koaxial gegenläufig rotierende Blätter, einen bürstenlosen Elektromotor und eine Auto-Return-Funktion für Notfälle.
Er kann 30 Minuten lang fliegen, hat eine Reichweite von etwa 48 km und seine Höchstgeschwindigkeit beträgt 100 km/h. Zusammen mit einem zweiten Batteriesatz und einer vollständigen Apotheke soll der Hubschrauber für ca. 80.000 $ verkauft werden (andere Quellen: 125.000 $), was auch für kleinere Organisationen erschwinglich ist, die sich keine bemannten Helikopter leisten können.
Im selben Monat stellen Wissenschaftler der New York University eine
von Quallen inspirierte Flugmaschine vor, die große Auswirkungen auf
die Evolution der kleinen fliegenden Roboter haben könnte.
Üblicherweise benötigen Flatter-Flügel-Drohnen ein voll automatisiertes Flugsteuerungssystem, um sofort auf Dinge wie Windböen reagieren können. Diese Systeme benötigen jedoch physische Hardware, die unerwünschte Komplexität sowie zusätzliches Gewicht mit sich bringt.
Im Gegensatz dazu kann der von Leif Ristroph entwickelte Flying Jellyfish alleine durch seine Gestaltung stabil bleiben. Er besteht aus vier Flügeln, die wie Blütenblätter einer Blume angeordnet sind, und die mit einer Rate von 20 Schlägen pro Sekunde flattern.
Beim Steigen oder Sinken ähneln die Bewegungen in der Tat denen einer pulsierenden Qualle. Im Schwebemodus erinnern die Aktionen eher an eine Motte. Bislang benötigt die Flugqualle eine externe, fest verdrahtete Stromquelle, und kann auch noch nicht gesteuert werden.

Im Dezember ist aus der ETH Zürich zu erfahren,
daß die dortigen Forscher um den Doktoranden Mark Müller einen
Softwarealgorithmus namens Failsafe entwickelt hätten,
der es jedem Quadrokopter erlaubt, weiter zu fliegen, selbst
wenn er mehere Motoren oder Propeller verliert.
Wenn die neue Software den Ausfall eines Propellers oder Motors feststellt, nutzt sie die übrigen Propeller, um eine kontinuierliche Drehbewegung des Quadrokopter zu erzeugen. Der Algorithmus kippt sodann die Drehachse dieser Rotationsbewegung. Über eine zusätzliche Anpassung des gesamten Schubs, der von den verbleibenden Propellern erzeugt wird, kann er die Bewegung des Vehikels kontrollieren. Der Algorithmus arbeitet sogar, auch wenn nur noch ein Propeller in Betrieb ist.
Bei den im Dezember 2013 in San Francisco stattfindenden
Drone Olympics (die inzwischen auf Druck des Internationalen
Olympischen Komitees in DroneGames umbenannt werden
mußten - und die auch nichts mit Drohnen-Rennen zu
tun haben) führt James
,Substack’ Halliday seinen Virus-Kopter namens Github vor,
der drahtlosen Kontakt zu seinen Konkurrenten herstellt und sie mit
Viren infiziert, die sie unter seine Kontrolle bringen – um dann die
übernommenen Drohnen loszuschicken, den Rest der Kohorte zu infizieren
und schließlich Amok laufen zu lassen.
(Grafik)
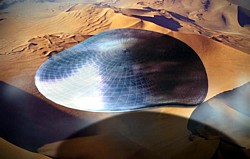
Irgendwann in diesem Jahr veröffentlicht das Designbüro Baharash Architecture aus Dubai, das u.a. ein Biodome-Projekt in Ra’s al-Chaima in den VAE plant, das Konzept des ersten Drohnen-Solarparks der Welt, der unter dem Namen Solar Clouds – Solar Farms in the Sky bekannt gemacht werden soll. Ziel dieses Projekts ist es, bei Naturkatastrophen wie Wirbelstürmen, Überschwemmungen, Bränden und Erdbeben, in denen die lokale Stromversorgung zerstört wurde, sofort Energie zu liefern.
Dies soll durch die Entwicklung eines einzigartigen autonomen Energiesystems geschehen, das sich als als mobile, schwebende Solarfarm im Himmel beschreiben läßt. Über die Aussage hinaus, daß die wolkenähnliche Solardrohne über eine Netzstruktur aus Solarpaneelen verfügt, die es ihr ermöglicht, während des Flugs Zug-, Dreh- und Druckkräften zu widerstehen, gibt es keine weiteren technischen Details. Es scheint auch, daß das Designbüro zwar exzellente Grafiker beschäftigt - bislang aber noch keines seiner ambitionierten Projekte verwirklichen konnte.
Weiter mit den Elektro- und Solarfluggeräten...