Buch der Synergie
| Blättern |
 TEIL
C
TEIL
C
Elektro- und SolarfluggerÄte
2022 (C)
Technologische
Entwicklungen
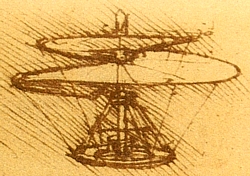
Im Januar 2022 wird in den Blogs ein Fluggerät gezeigt,
das wohl einen langen Streit beenden wird: In den späten 1480er Jahren
hatte Leonardo da Vinci den Entwurf eines Fluggeräts
skizziert, den er Helix Pteron (Wendel-Flügel) nannte
und dessen Funktionsfähigkeit von vielen Seiten angezweifelt wurde.
Die Erfindung konnte damals aber nur nicht verwirklicht werden, weil
ein angemessen leichtes, stabiles Material und ein ausreichend leistungsfähiger
Antrieb fehlten.
(Grafik)
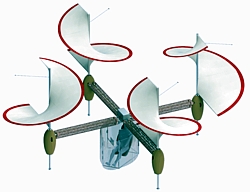
Da sich dies zwischenzeitlich geändert hat, gelingt es einem Team von Ingenieuren an der University of Maryland (UMD) unter der Leitung des Luft- und Raumfahrttechnik-Studenten Austin Prete zu beweisen, daß da Vincis Konzept tatsächlich funktioniert.
Im Rahmen des 37. jährlichen studentischen Hubschrauber-Designwettbewerbs der Vertical Flight Society (VFS) an der UMD im Jahr 2020, der unter dem Motto ‚Leonardos Luftschraube: 500 Jahre später’ steht und von der American Helicopter Society (AHS) und der Firma Leonardo Helicopters gesponsert wird, hatten Prete und sein Team mit ihrem Entwurf Elico den 1. Platz des Absolventen-Wettbewerbs gewonnen. Die Aufgabe lautete, ein VTOL-Fahrzeugs auf der Grundlage von Leonardos Luftschraube zu entwerfen und dessen potentielle Machbarkeit physikalisch zu belegen.
(Grafik)
Das Konzept sieht ein Fluggerät vor, das einen Piloten oder Passagier (60 kg) befördern kann, senkrecht startet, mindestens eine Minute lang fliegt (mit einer Reichweite von mindestens 20 m) und wieder senkrecht landet. Dabei sollen Rotoren mit einem Durchmesser von 7,7 m genügend Auftrieb für den Transport von Menschen erzeugen. Die Aufgabe ähnelt dem im Juni 2013 abgeschlossenen Wettbewerb um den Sikorsky Prize der AHS, bei dem es galt, einen einminütigen Flug mit einem muskelbetriebenen Hubschrauber zu absolvieren (s.d.).
Interessanterweise gewinnt ein anderes Team mit einem fast identischen Konzept namens Samara den 2. Platz im Wettbewerb der nicht-graduierten Studenten.
Nun, zwei Jahre später, hebt das von Prete für seine Masterarbeit gebaute und inzwischen Crimson Spin genannte Vehikel tatsächlich ab, wie die veröffentlichten Videos von Flugtests belegen, die auf der Tagung Transformative Vertical Flight 2022 in San Jose, Kalifornien, durchgeführt wurden. Auf dem Weg dahin hatte das Team 3D-gedruckte Simulatoren benutzt, um herauszufinden wie die Luftschrauben funktionieren.

Demnach bewegen sich Luftwirbel spiralförmig an der Struktur hinunter und erzeugen dabei vertikalen Schub. Es stellt sich heraus, daß da Vincis Design tatsächlich sogar besser ist als Standardpropeller, da es leiser ist und weniger abwärts gerichtete Böen erzeugt, die Staub und Schutt aufwirbeln.
Aus technischer Sicht ist besonders interessant, daß die Luftschrauben an den Rändern Vortexe erzeugen, die denen von Deltaflügelflugzeugen wie dem Space Shuttle und dem Überschallflugzeug Concorde sehr ähnlich sind und zusätzlichen Auftrieb erzeugen. Das heißt, daß die Luftschrauben den größten Teil ihres Auftriebs erzielen, indem sie Wirbel erzeugen, die über die Spitze der Schrauben fließen und eine Unterdruckzone auf ihrer Oberseite erzeugen. Durch die damit entstehende Hochdruckzone an der Unterseite der Schraube wird das Flugzeug nach oben getrieben.
Der Crimson Spin – eine umgebaute kleine Quadrokopter-Drohne – verwendet vier handgefertigte Luftschrauben mit einem Durchmesser von 15 cm, die aus einem Aluminiumschaft, Verbundstoff-Holmen und Mylar für die Außenhaut bestehen. Außerdem ist jeder Schraube eine zweite Schaufel hinzugefügt, womit eine Art Doppelhelix entsteht, die dazu beiträgt, das ursprüngliche einseitige Design während des Fluges zu stabilisieren.
Während das Fluggerät relativ stabil abhebt und der Schwebeflug kein Problem darstellt, bieten die Luftschrauben keinen großen Vorwärtsschub, so daß die seitliche Fortbewegung schwieriger ist. Die Richtungsänderungen werden über die Geschwindigkeit der einzelnen Rotoren gesteuert. Prete zufolge, der inzwischen Ingenieur bei der Boeing-Tochter Aurora Flight Sciences ist, könnte das Konzept so weit hochskaliert werden, daß es auch Personen transportieren kann. Die ausführlichen technischen Details und Versuchsergebnisse finden sich in den im Netz einsehbaren Einreichungen auf der Seite der VFS.
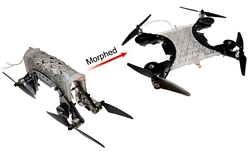
Wissenschaftler der Virginia Polytechnic Institute and State
University (Virgina Tech) um Prof. Michael Bartlett stellen
im Februar 2022 einen Soft-Roboter vor,
der sich von einem Fahrzeug in eine Drohne wandeln kann. Statt auf
Motoren und eine entsprechende Mechanik setzen die Forscher auf eine
Formänderung auf Materialebene – und benutzen eine Kombination aus
Elastomer, Metall und Temperatur, um eine Formwandlung zu erzielen.
Ziel des Projektes war es, ein Material zu entwickeln, daß die Form verändern, diese Form beibehalten und später wieder in die Ausgangsform zurückkehren kann, wobei das Material aber auch so beschaffen sein sollte, daß eine Formwandlung über viele Zyklen hinweg möglich ist, ohne daß es ermüdet. Um etwas zu konstruieren, das weich genug ist, um seine Form dramatisch zu verändern, und gleichzeitig steif genug, um anpassungsfähige Maschinen zu schaffen, die verschiedene Funktionen ausführen können, wird zunächst eine Struktur auf Basis der japanischen Papierfalt- und Schneidekunst Kirigami geschaffen, die aus Kautschuk und Verbundstoffen besteht.
Darauf aufbauend wird ein aus regelmäßigen geometrischen Mustern bestehendes Endoskelett aus einer Legierung mit niedrigem Schmelzpunkt (Low Melting Point Alloy, LMPA) entwickelt, das in einen Elastomer eingebettet ist. Um die Verformung zu erreichen bzw. das Material wieder in seine ursprüngliche Form zurückzubringen, wird das Endoskelett um ein Netzwerk aus flexiblen Heizelementen ergänzt, die sich rankenartig um die LMPA-Struktur legen.

(Wandlungsphasen)
Bei einer Temperatur von 60°C schmilzt das Metall, wird aber durch das umgebene Elastomer an seinem Platz gehalten und nach der Verformung durch reversible Plastizität wieder in seine ursprüngliche Form gebracht. Dies klappt deshalb, weil die durch Kirigami inspirierten Einschnitte im Endoskelett es ermöglichen, es in weniger als einer Zehntelsekunde in die gewünschte Form zu bringen und wieder in die Ausgangsform zu transformieren. Ist das Metall abgekühlt, ist die ursprüngliche Festigkeit wieder gegeben, und sollte das Metallmaterial des Endoskeletts brechen, so kann es durch Schmelzen und Neuformung mehrfach geheilt werden.
Basierend darauf bauen die Forscher einen Multikopter-artigen Soft-Roboter mit einem Grundkörper aus dem neuen Material, der sich so verformen läßt, daß er eingeklappt werden kann. Dann befinden sich vier Räder auf dem Boden, so daß der Roboter fahren kann, während er im ursprünglichen Zustand des Grundkörpers wie eine Drohne funktioniert. Die Bildsequenz zeigt die Umwandlung von Zustand 1 in Zustand 2.

Im Mai 2022 zeigen Forscher der City University of Hong Kong einen elektrisch angetriebenen Bikopter, der lange stabile Schwebeflüge absolvieren kann, was durch das Design möglich wird, das sich an Ahornsamen orientiert. Durch die Reduzierung der rund 50 g leichten Drohne auf einem einzelnen großen Propeller mit zwei Antriebsmotoren arbeitet sie äußerst energieeffizient. Im Gegensatz zu den echten Samen mit nur einem Flügel setzt das Team zwei davon symmetrisch zusammen.
Die Steuerelektronik und der Akku befinden sich in der Mitte des 60 cm langen Drehflügels. Hier kann bei Bedarf auch eine Nutzlast untergebracht werden. Die beiden Motoren versetzen den Bikopter in eine Rotation von rund 200 U/m, wodurch er seinen Auftrieb erhält – und nicht von den kleinen Propellern. Zudem wirken die Flügel als aerodynamische Dämpfer, die zu einer stabilen Fluglage beitragen.
Gesteuert wird die Drohne dadurch, daß die beiden Antriebsmotoren an passender Stelle einen kurzen Impuls bekommen, um so ihre Drehrichtung zu ändern. Mit seinem 650 mAh Akku fliegt der Bikopter im reinen Schwebeflug 24,5 Minutenlang, bei Richtungsänderungen ist der Energieverbrauch allerdings höher. Und indem die ständige Rotation des Fluggeräts genutzt wird, kann eine eingebaute, 22 g schwere Videokamera durch Synchronisation von Kamerabildrate und Drehgeschwindigkeit Videos mit 3,5 Bildern pro Sekunden in vier verschiedenen Richtungen aufnehmen.
Das Wissenschaftsteam beschreibt das Projekt in dem Paper ‚A bioinspired revolving-wing drone with passive attitude stability and efficient hovering flight‘, die im Netz einsehbar ist. Zur Erinnerung: Es gab bereits früher Umsetzungen, welche die Struktur von Ahornsamen zum Vorbild haben, wie z.B. der Samara MAV der University of Maryland im Mai 2009 oder der Samarai Flyer der Firma Lockheed Martin im August 2011 (s.d.).

Eine Drohne mit einem etwas gewöhnungsbedürftigen Design wird im Juni 2022 in den Blogs vorgestellt. Ich führe sie hier – und nicht unter den Einsatzbereichen – auf, weil die Astria der US-Firma Pitch Aeronautics aus Boise, Idaho, neben sechs horizontalen Rotoren für den Schwebeflug auch noch einen zentral angebrachten Zyklorotor (o. Cyclorotor) besitzt, mit dem sie sich zentimetergenau manövrieren läßt.
Das mit Unterstützung der Purdue Foundry von dem Militärpiloten und Maschinenbauingenieur Zach Adams im Jahr 2015 gegründete Unternehmen bringt mit der – nach der griechischen Göttin der Präzision benannten – Astria die allererste Zyklorotor-Hybriddrohne mit Nah- und Berührungsfähigkeiten auf den Markt, um mit dieser auch in gefährlichen oder prekären Situationen präzise Aufgaben erfüllen zu können.
Die meisten Drohnen kippen und neigen sich, um sich fortzubewegen und gegen Windböen zu korrigieren, was es ihnen erschwert, solcherart Aufgaben auszuführen. Durch den Einbau eines Zyklorotors kann das Fluggerät hingegen absolut waagerecht und stabil in der Luft bleiben und sich gleichzeitig schnell und präzise in jede Richtung bewegen. Zyklorotoren treiben Luft an, ähnlich wie ein Raddampfer Wasser antreibt, und bestehen aus einer sich drehenden Trommel mit Schaufeln an den Seiten, die ihre Steigung extrem schnell ändern können, um den Schub fast sofort in jede Richtung zu übertragen.

Die für den Transport vollständig auseinandernehmbare Astria besitzt einen zentraler Balken von etwa 3 m Länge, während die sechs zweiblättrigen Propellern weit außen auf Stangen montiert sind. An einem Ende des Hauptträgers befindet sich der Akku, und am anderen Ende kann eine Vielzahl von Werkzeugen, Sensoren, Roboterarmen und anderen Nutzlasten mit einem Gewicht von bis zu 4,5 kg angebracht werden. Das Akkupaket gleicht die Nutzlast aus, so daß diese weit vor den Propellern sitzt, direkt vor dem Ziel, an dem gearbeitet werden soll.
Der Zyklorotor auf der Oberseite übernimmt alle Aufgaben des horizontalen Schubs. Er dreht sich ständig und verändert lediglich die Blattneigung, um den Schub bei Bedarf umzuleiten. Damit lassen sich Stabilitätskorrekturen und horizontale Positionsanpassungen fünf- bis zehnmal schneller vornehmen als bei typischen Multikoptern. Die Astria ist dadurch in der Lage, Nutzlasten mit außergewöhnlicher Präzision und Stabilität sehr nahe an einem Ziel zu plazieren und es bei Bedarf sogar zu berühren.
Wie das Unternehmen betont und in seinen Videos zeigt, kann Astria eine Reihe von hochpräzisen industriellen Inspektions- und Wartungsaufgaben übernehmen, für die sich normalerweise Arbeiter in extrem riskante Seilpositionen begeben müssen. Als Beispiele werden die Inspektion von Windturbinenblättern, das Anbringen von Vogelabweisern an Hochspannungsleitungen oder die präzise Messung von Brückenrissen genannt.
In diesem Zusammenhang soll erwähnt werden, daß bereits mehrere Firmen daran arbeiten, Zyklorotoren als alleiniges Antriebssystem in elektrischen und hybriden VTOL-Flugzeugen zu kommerzialisieren. Der bisherige Entwicklungsstand wird in der Jahresübersicht 2020 zusammengefaßt, weitere Informationen finden sich im Kapitel Windenergie unter Antriebs-Varianten als Teil der Darrieus-Rotoren.

Im August 2022 stellt das Team um Alexis Lussier Desbiens an der Université de Sherbrooke in Quebec, das uns bereits im Jahr 2017 mit der solarbetriebenen Drohne SUWAVE begegnet ist, die auf dem Wasser landen und von dort aus auch wieder starten kann, sowie mit der S-MAD, die wiederum auf ausreichend rauhen senkrechten Flächen landen und starten kann, seine neueste physikalische Landetechnologie vor, die es Drohnen ermöglicht, auf einer der häufigsten Oberflächen im städtischen Umfeld zu landen – auf schrägen Dächern.
Die marktüblichen Quadrokopter können aufgrund ihres steifen Fahrwerks nur schwer auf schrägen Flächen landen. Als Lösung wird an einer DJI F450-Drohne ein spezielles Fahrwerk mit leichten Reibungsstoßdämpfern angebracht, um die kinetische Energie des Aufpralls zu absorbieren, während eine schnelle Schubumkehr die Landung und den Halt auf den Schrägen ermöglicht. Bei Test in einer realen Umgebung im Freien landet die Drohne erfolgreich auf Oberflächen mit einer Neigung von bis zu 60° und mit einer Geschwindigkeit von bis zu 2,75 m/s.
Ingenieure der University of California, Berkeley um Mark W. Mueller stellen im September 2022 eine neue Drohne vor, die lediglich die Rotoren schräg stellen muß, wenn sie vorankommen will. Sie hat einen rechteckigen Körper mit vier Armen, die flexibel mit dem Korpus verbunden sind und an deren Enden sich die Rotor-/Motormodule befinden. Federbelastete Scharniere halten die Arme zunächst fest, so daß die Antriebsmodule senkrecht stehen.
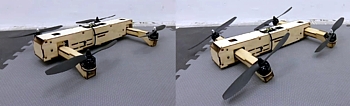
(Trägerpositionen)
Die Kraft der Federn läßt sich zum Vorwärtsfliegen jedoch durch die Kraft der Rotoren überwinden, und sobald der Schub eine bestimmte Marke überschreitet, kippen die Antriebsmodule um bis zu 20° relativ zum Rest der Drohne in die vordere Flugrichtung, so daß zwar der Korpus waagerecht bleibt, die Luft aber nach hinten weggedrückt wird und die Drohne vorwärts fliegt.
Damit unterscheidet sich die neue, QUaRTM (= QUadcopter with an unactuated Rotor Tilting Mechanism) genannte Drohne von ähnlich konzipierten Modelle, die zum Kippen zusätzliche Stellmotoren benötigen, die auch das Gewicht signifikant steigern. Normale Quadrokopter müssen wiederum ihr vorderes Ende nach unten neigen, wenn sie vorwärts fliegen, was ihre Frontfläche vergrößert und damit den Luftwiderstand erhöht.
Bei autonomen Testflügen im Freien sowohl mit als auch ohne aktivierten Kippmechanismus zeigt sich, daß die neue Kipprotor-Drohne bei aktiviertem Mechanismus eine um 7,5 % höhere Reisegeschwindigkeit und eine um 12,5 % höhere Höchstgeschwindigkeit erreicht, während der Stromverbrauch im Geschwindigkeitsbereich von 15 – 20 m/s um mehr als 20 % niedriger liegt. Der Artikel mit dem Titel ‚QUaRTM: A Quadcopter with Unactuated Rotor Tilting Mechanism Capable of Faster, More Agile, and More Efficient Flight‘ ist im Netz vollständig einsehbar.
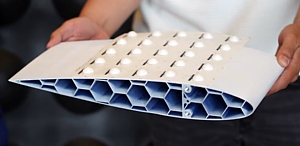
Im Zuge des vom Bundesministerium für Ernährung und Landwirtschaft (BMEL) mit rund 345.000 € geförderten Projekt HerMes mit einer Laufzeit von Oktober 2020 bis September 2022 entwickelt das Fraunhofer-Institut für Holzforschung, Wilhelm-Klauditz-Institut (WKI) gemeinsam mit den Unternehmen Leichtwerk Research GmbH und Jowat SE sowie weiteren Partnern in drei Teilvorhaben einen hocheffizienten, modularen Multikopter - auf Basis nachwachsender, regional verfügbarer Rohstoffe.

Multikopter
Dank des biobasierten Strukturdesigns aus 3D-Holzfurnieren, naturfaserverstärkten Kunststoffen auf Duroplastbasis und thermoplastisch verarbeitbaren, naturfaserverstärkten Biokunststoffen ist das neue Fluggerät deutlich nachhaltiger als vergleichbare konventionelle Systeme, die zumeist aus Kohlenstoff-, Glas- oder Aramidfasern sowie petrochemischen Polymeren bestehen.
Der wasser- und staubdichte Multikopter verfügt über 25 kg Abflugmasse
sowie über eine große Nutzlastfläche und kann aufgrund seiner modularen
Bauweise leicht für spezifische Verwendungen angepaßt werden. Zur Erprobung
und Optimierung werden umfangreiche Betriebs- und Flugversuche durchgeführt
- und Mitte 2023 auch ein Video veröffentlicht - doch
danach gibt es keine weiteren Neuigkeiten, und auch von einer Kommerzialisierung
ist bislang nichts zu sehen.
Im November 2022 berichtet ein Forschungsteam der
schweizerischen École Polytechnique Fédérale de Lausanne (EPFL)
unter der Leitung von Dario Floreano über die Entwicklung
einer Drohne, mit der Menschen in Notsituationen schnell und unkompliziert
mit Nahrung versorgt werden sollen. Die Tragflächen der Drohne bestehen
nämlich aus Reisgebäck und sind somit eßbar. Das Material, das dafür
verwendet wird, ist gepreßter Puffreis, der nicht nur ähnliche Eigenschaften
wie das beim Drohnenbau genutzte Expandierte Polypropylen (EPP) hat,
sondern pro Kilogramm auch noch rund 3.870 Kilokalorien enthält.

Zur Umsetzung schneiden die Forscher im Handel erhältliche Puffreistaler per Laser in Hexagon-Form und kleben sie anschließend mit Gelantine zusammen, um sie in eine Tragflächenform zu bringen. Die so entstandenen Flügel umwickeln sie dann mit Frischhaltefolie, um Verunreinigungen während des Fluges vermeiden sowie die Festigkeit der Tragflächen sicherzustellen.
Die eßbare Drohne wird elektrisch angetrieben und hat eine Spannweite von 70 cm, was eßbarem Material mit einem Nährwert von 300 Kilokalorien entspricht – also etwa einem kleinen Frühstück. Außerdem erlaubt die Drohne eine Zuladung von 80 g – etwa für eine Notration Trinkwasser in einem ebenfalls eßbaren Behältnis. Der Rest der Drohne besteht aus konventionellen Materialien wie Kohlefaser, doch die Forscher arbeiten bereits daran, diese ebenfalls durch eßbare Materialien zu ersetzen.
Außerdem will das Team die Tragflächen noch besser formen, um die Flugeigenschaften der Drohne zu verbessern. Daneben wird ein 3D-Food-Printing- und Molding-Verfahren getestet, um auch gänzlich andere Formen bauen zu können. Darüber hinaus wird darüber nachgedacht, die Tragflächen mit Fett zu ergänzen, um die Kaloriendichte zu erhöhen, was allerdings mit einem höheren Tragflächengewicht einhergehen wurde.
Der aktuelle Prototyp erreicht mit einem Motor, einigen Servos zur Steuerung der Heckflächen und einer kleinen Batterie eine Geschwindigkeit von etwa 10 m/s. Das Projekt ist Teil der umfassenden europäischen Forschungsinitiative RoboFood, in deren Rahmen an eßbaren technischen und elektronischen Komponenten sowie am Transport von Impfstoffen und Nahrungsergänzungsmitteln zu gefährdeten Tierarten geforscht wird.
In Zusammenarbeit mit Kollegen der University of Tennessee entwickeln Wissenschaftler der Purdue University in Indiana, wie im Oktober 2022 berichtet wird, den Konzeptnachweis einer neuen Methode, um den Luftdruck auf den Flügeln autonomer Starrflügler-Drohnen zu überwachen. Hierzu bringen sie auf der Oberseite eines Flügels ein Gitter aus kleinen Polyurethan-Kuppeln an, wie sie von den Deckeln mancher Getränkebecher bekannt sind, und die man herunterdrücken kann, um anzuzeigen, welche Art von Getränk der Becher beinhaltet.
Zum Hintergrund: Ein Problem, mit dem solche Drohnen zu kämpfen haben, ist die Tatsache, daß ihre Bordcomputer ständig mit Daten überflutet werden, die von mehreren Sensoren eingehen. Daher benötigen die Fluggeräte eine beträchtliche Menge an Rechenleistung – und selbst dann kann es noch zu erheblichen Verzögerungen kommen zwischen dem Zeitpunkt, an dem die sensorischen Informationen eingehen, und dem Zeitpunkt, an dem darauf reagiert wird.
Um diese Informationsflut zu verringern, haben die Forscher um Andres F. Arrieta nun Sensoren entwickelt, die Daten, die unbedeutend sind, einfach nicht registrieren. Im Fall der Flügel befinden sich unter den Kuppeln bzw. Blasen spezielle Membranen aus piezoelektrischer Polymilchsäure (PLA), die zusammen mit den Kuppeln eine vernetzte Anordnung bilden.
Solange die über den Flügel strömende Luft eine bestimmte Druckschwelle nicht überschreitet, fällt keine der Blasen nach unten. Wird der Druck jedoch hoch genug, werden einige der Blasen vorübergehend umgedreht und drücken auf die darunter liegende PLA-Membran und verformen sie. Die Anordnung registriert, wo diese Verformungen auftreten, und leitet diese Informationen an den Computer weiter, der das Muster des Hochdruckluftstroms über den Flügel kartiert.
Erst wenn dieses Muster auf gefährliche Flugbedingungen hinweist, wird das Flugkontrollsystem der Drohne informiert, um entsprechend zu reagieren. Das Ganze wird dadurch vereinfacht, daß die Kuppeln stets entweder oben oder unten sind und die von ihnen gelieferten Daten den 1en und 0en entsprechen, die in der Binärberechnung verwendet werden. Die Technologie soll nun innerhalb der nächsten drei bis fünf Jahre in einen voll funktionsfähigen Drohnenflügel eingebaut werden. Auch dieser Bericht mit dem Titel ‚Neuromorphic Metamaterials for Mechanosensing and Perceptual Associative Learning‘ ist im Netz komplett einsehbar.
Im Dezember 2022 zeigt der Postdoktorand Raphael Zufferey der EPFL eine besondere Schlagflügel-Drohne, die er in Zusammenarbeit mit Kollegen der spanischen Universität Sevilla und im Rahmen des Projekts GRIFFIN der EU gebaut und getestet hat. GRIFFIN steht dabei für ‚General compliant aerial Robotic manipulation system Integrating Fixed and Flapping wings to INcrease range and safety‘.

Der Prototyp des autonomen Ornithopters mit dem Namen P-Flap (Perching Flapping-Wing Robot) hat eine Flügelspannweite von 1,5 m, wiegt dabei aber nur 700 g. Um Ziele wie Äste oder Rohre greifen und sich wie ein Vogel darauf niederlassen zu können, ist der Kunstvogel mit einer einzigen federbelasteten mechanischen Klaue aus Kohlefaser ausgestattet. Die über ein servobetätigtes Bein mit der Unterseite der Drohne verbundene Vorrichtung ist bistabil, d.h. sie benötigt keine Energie, um sowohl im offenen als auch im geschlossenen Zustand zu bleiben.
Aktuell werden Flugexperimente in Innenräumen durchgeführt, bei denen der P-Flap drahtlos von einem externen Bewegungserfassungssystem geführt wird, während er sich einer horizontalen Stange nähert. Anhand dieser Daten kann das interne Flugsteuerungssystem die Neigung, das Gieren und die Höhe anpassen, um das Ziel zu treffen. Sobald sich die Klaue bis auf einen Meter der Stange nähert, liefert ein Bildsensor an ihrer Basis genauere Positionsdaten und aktiviert den Servo des Beins, um es präzise zu positionieren.
Wenn dann zwei Vorsprünge an der offenen Innenseite der Klaue das Ziel berühren, schließt sich diese innerhalb von nur 25 ms automatisch um den Stab und hält den P-Flap fest in Position. Wenn es an der Zeit ist, die Sitzstange zu verlassen und den Flug fortzusetzen, wird die Klaue durch einen motorisierten Mechanismus im Schaft wieder geöffnet. In realen Szenarien könnte die Drohne in ihrer Halteposition Tätigkeiten wie das Beobachten von Personen oder Orten, die Entnahme biologischer Proben von Bäumen oder das Aufladen der Batterie über integrierte Solarzellen übernehmen.
Zur Abrundung sei darauf hingewiesen, daß es bereits diverse Schlagflügel-Drohnen
gibt, angefangen mit dem vom Georgia Institute of Technology für
den Einsatz auf dem Mars entwickelten Entomopter (1996);
über den COM-BAT, den die University of
Michigan für die US-Army entwickelt, sowie die Schlagflügel-Mikrodrohne DelFly
Micro der niederländischen TU Delft (beide 2008);
das Flatterflugzeug der UC San Diego (2011);
die Drohne Meganeuropsis der Firma Flapping
Wing Production Studio aus Osaka; die RoboBees der Harvard
University (beide 2013);
bis zu dem Ornithopter der University of
South Australia (2020),
um nur einige Beispiele zu nennen.
Ebenso verhält es sich mit der Lande- und Greiffähigkeit, die ebenfalls diverse Vorläufer hat, wie z.B. die Wandlander-Drohne der Stanford University (2010) oder die Drohne mit Haltegreifer der Colorado State University (2020).
Weiter mit den Elektro- und Solarfluggeräten...