Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2011 (B)
Im Juli 2011 wird an der Universität Southampton erstmals
ein vollständiges, steuerbares Modellflugzeug mit CAD-Tools entwickelt
und mit einem 3D-Drucker hergestellt.
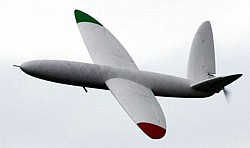
Vom Design bis zur Fertigstellung des SULSA (Southampton University Laser Sintered Aircraft) nimmt die Entwicklung nur eine Woche in Anspruch. Aufgrund des begrenzten Budgets wird die Drohne ohne Fahrwerk und mit einem V-förmigen Heck ausgestattet. Die Spannweite mißt knapp 2 m, und der kleine Elektromotor am Heck erlaubt eine Höchstgeschwindigkeit von bis zu 160 km/h.
(Grafik)
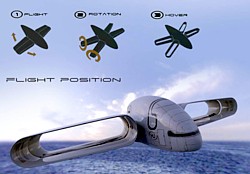
Den 1. Platz unter den Gewinnern des Terra Prix 2085 Design-Wettbewerbs
im Juli 2011 nimmt das Konzept Terrahornet des
französischen Designers André Doumenc ein. Dabei handelt
es sich um ein für maximale Effizienz und Umweltverträglichkeit ausgelegtes
Elektro-Rennfahrzeug, das in zwei Ausführungen vorgestellt wird, als
Schneemobil sowie als Landläufer. Denn Räder gibt es keine – statt dessen
mehrere flexible Bögen, die von der Achse gedreht werden und das Gefährt
bei langsamer Bewegung voranwatscheln lassen.
Ich erwähne das Konzept hier und nicht bei den Elektromobilen, weil das Rennfahrzeug als Träger eine Art Flugzeug namens Scarab 2200 besitzt, das von der Dyson-Technologie inspiriert mit rotierenden Hohlflügeln ausgestattet ist und daher auch vertikal landen kann. Es ist mehrstöckig und bietet Platz für 15 Personen – sowie für den Renner.

(Grafik)
Daneben entwickelt der kreative Designer auch noch diverse andere Boden- und Luftfahrzeuge, leider ohne im Detail auf die angedachten Antreiebtechniken einzugehen. Aus seinem Oevre ist aber ersichtlich, daß er elektrische Antriebe favorisiert.
Ein Paraglider-Entwurf, der alleine schon aufgrund seiner ästhetischen Qualität gezeigt werden muß – unabhängig davon, ob die Gestaltung überhaupt sinnvoll oder machbar ist – trägt den Namen DreamGlider und besteht aus einem Tragflächenoval, an dessen beiden Enden auf der einen Seite die Kabine und auf der anderen die Antriebstechnik und die senkrechte Steuerflosse angebracht sind. Für Doumenc ist der Flieger im Jahr 2027 entwickelt worden.
Im August 2011, während der EAA AirVenture in Oshkosh,
macht der Taurus Electro G4 seinen
Erstflug, ein Technologieerprobungs- und Wettbewerbsflugzeug des slowenischen
Herstellers Pipistrel, welcher schon früher verschiedene interessante
Flugzeuge vorgestellt hat. Das neue und höchst innovative Modell besteht
aus einen Doppelrumpf mit einem mittig dazwischen eingebauten Motor,
und bietet Platz für vier Personen samt Gepäck. Die Maße betragen: Länge
7,27 m, Spannweite 21,46 m, Höhe 1,41 m, Leergewicht ~ 1.064 kg, maximales
Startgewicht 1.495 kg.

Das Konzeptflugzeug wird – nach zweijähriger Vorbereitungszeit – in nur vier Monaten aus zwei Rümpfen des Elektroseglers Taurus G2 gebaut, die über einen 5 m langen Holm miteinander verbunden sind. In der Mitte dieser Zentral-Tragfläche befindet sich eine aerodynamisch verkleidete Motorgondel mit einem 145 kW Elektromotor (andere Quellen: 150 kW), der einen Zweiblatt-Propeller mit 2 m Durchmesser antreibt.
Die Stromversorgung erfolgt durch Lithium-Polymer-Batterien von mehr als 500 kg Gewicht. Dieses hier erstmals installierte Antriebssystem ist auch für den künftigen Pipistrel-Viersitzer Panthera vorgesehen (s.o.). Pipistrel will mit dem Taurus Electro G4 Ende September an der Green Flight Challenge der NASA teilnehmen, für eine kommerzielle Produktion ist der Flieger aber nicht vorgesehen ... was eigentlich schade ist.
Während der AirVenture wird im Rahmen des World Electric Aircraft Symposiums 2011 ein
weiterer Lindbergh Electric Aircraft Prize (LEAP) verliehen. Diesmal
überreicht Erik Lindbergh den Preis an Calin Gologan, Entwickler der Elektra
One und Chef der PC-Aero GmbH, womit insbesondere das ganzheitliche
Konzept der Integration modernster Solartechnologien (der Firma SolarWorld)
sowohl in das Elektroflugzeug als auch in den Solar-Hangar gewürdigt
wird. Die Auszeichnung ist die bereits siebte von LEAP. Jeweils drei
wurden bei der AirVenture im Jahr 2010 sowie im Frühjahr
dieses Jahres auf der Aero in Friedrichshafen vergeben.

Ebenfalls im August präsentieren vier Ingenieure aus Santa Cruz, die
bald darauf eine eigene Firma namens Transition Robotics Inc. gründen,
Startkapital über die Croudfundung-Plattform Kickstarter bekommen,
und in Produktion gehen, ein Fernbedienungs-Flugmodell, das die Schwebe-Fähigkeiten
eines Hubschraubers mit der Fähigkeit verbindet, wie ein Flugzeug zu
fliegen. Der Quadshot verwendet ein Nurflügler-Design,
das senkrecht schweben - oder sich in die Horizontale drehen und wie
im Kunstflug durch die Luft segeln und Sturzflüge durchführen kann.
Der Elektroflitzer besteht aus einem 1 m langen, gebogenen Flügel, an dem entlang seiner Länge vier Motoren/Rotoren angebracht sind. Nach dem senkrechten Start kann der Flieger durch Umlegen eines Schalters auf der Fernbedienung wie ein normales Starrflügel-Flugzeug geflogen werden. Wird es Zeit zu landen, geht das Flugzeug zurück in den Heli-Modus und setzt mit dem Heck auf den Boden auf. Beim Update Mitte 2013 werden auf der Homepage von Transition Robotics bereits verschieden Modelle angeboten, angefangen von dem Modell Mocha für 350 $.

Das Konzept eines Mini-UAV nach dem Prinzip des spiralig fliegenden Ahorn-Samens,
an dem u.a. Forscher der Firma Lockheed Martin seit
längerem arbeiten (s. Oktober 2009),
wird im August in einer wesentlich fortgeschritteneren Version gezeigt.
Auf der internationalen Konferenz der Association for Unmanned Vehicle
Systems in Washington, D.C., führt das Unternehmen seinen Samarai
Flyer erstmals öffentlich vor. Er kann vom Boden aus starten,
oder hierfür wie ein Bumerang in die Luft geworfen werden. Mit einer
Länge von 40,6 cm und einem Gewicht von 227 g hat das Gerät nur zwei
bewegliche Teile.
Allerdings hat der Einflügler auch eine integrierte Video-Kamera, die einen Live-Feed an den Betreiber überträgt. Da sich diese Kamera ständig um sich selber dreht, ist es nicht möglich, ein normales Video aufzunehmen. Statt dessen fängt die Kamera bei jeder Drehung an der gleichen Stelle ein Bild ein und kombiniert diese Frames zu einem relativ kontinuierlichen Film. Durch Variieren des Punktes, bei dem die Einzelbilder gemacht werden, kann der Benutzer die Kamera virtuell um 360° ‚schwenken’.
Aufgrund des robusten und effizienten Designs ist das Fluggerät hauptsächlich für militärische Überwachungs- und Aufklärungsmissionen gedacht. Es ist in der Lage, kleine Nutzlasten zu transportieren und abzuwerfen, und kann mit einem 3D-Drucker kostengünstig hergestellt werden, womit es auch relativ einfach ist, speziell angefertigte Flieger für bestimmte Zwecke zu produzieren.
Mit dem Vorschlag, entlegene Orte in der 3. Welt durch ein Netzwerk von
Bodenstationen für kleine, unbemannte Quadrokopter mit dem Notwendigsten
(z.B. Medizin, Nahrungsmittel etc.) zu versorgen, macht das Start-Up
Unternehmen Matternet aus Palo Alto, Kalifornien,
im August 2011 auf sich aufmerksam. Das Konzept dazu
war 2009 von Andreas Raptopoulos gemeinsam
mit Studenten der Singularity University im Silicon
Valley in einem zehnwöchigen Sommerseminar entwickelt worden. Erstmals
zum Einsatz kommen die UAVs nach dem Erdbeben in Haiti im
Januar 2010, als sie leichte Pakete mit Hilfsgütern
ausliefern.
Der Einsatzbereich ist sehr groß. Vor allem in Afrika behindert die mangelhafte Infrastruktur den schnellen Transport von oftmals dringend benötigten Waren, und dies nicht nur während der Regenzeit. Der bislang einzige einigermaßen schnelle Weg, diese Orte zu erreichen, ist in konventionellen Flugzeugen oder Hubschraubern zu fliegen, was teuer ist und die Dienste ausgebildeter Piloten erfordert.

(Grafik)
Eine kostengünstige Alternative würden die GPS-geleiteten Quadrokopter bieten, die in 400 Fuß Höhe eine Strecke von ca. 10 km in 15 Minuten fliegen und eine kleine Box für den Transport von Waren tragen. Denkbar ist auch die Verbindung von verschiedenen Kliniken in einem Netzwerk, die bei Bedarf sehr schnell Medizin geliefert bekommen bzw. Material für die Diagnostik abholen lassen können.
Hierfür entwickelt die von Raptopoulos und Paola Santana gegründete Matternet einen elektrischen Quadrokopter, der innerhalb des Systems verwendet werden soll. Während das derzeitige Modell 1 kg Last über 3 km transportieren kann, sollen als nächstes 10 km erreicht werden.
Dies bedeutet jedoch nicht, daß das System nur dazu dienen würde, Dörfer innerhalb von zehn Kilometer Radius zu beliefern. Statt dessen würden die UAVs von Bodenstationen in den Dörfern starten und landen, wo Menschen vor Ort die leeren Akkus gegen volle tauschen, welche von einem solarbetriebenen Ladegerät aufgeladen worden sind, oder andere Wartungsarbeiten durchführen. Auf diese Weise könnten die Flieger ihren Weg von Dorf zu Dorf zu machen, bis sie ihr Ziel erreichen.
In einer Studie für den Masru-Distrikt im südafrikanischen Lesotho wird ein Bedarf an 50 Basisstationen und 150 Drohnen ermittelt, was zusammen 900.000 $ kosten würde. Für diesen Betrag ließen sich höchstens 2 km einer einspurigen Straße befestigen und asphaltieren.
Für den Anfang will Matternet ein einfaches Punkt-zu-Punkt-System zwischen zwei Standorten einrichten, wobei ein kompletter Set aus einen (der gegenwärtigen kleinen) UAV und zwei Bodenstationen etwa 2.500 $ kosten soll. In einer langfristigen Vision wird aber auch schon von Transportlasten bis zu 1.000 kg gesprochen – und daß die unbemannten Luftfahrzeuge auch den Transport in Megastädten übernehmen könnten. Erste Erfolge gibt es dann in der Dominikanischen Republik, wo Matternet im August und September 2012 die ersten Feldversuche mit seinem System durchführt.

Ebenfalls im August 2011 beginnen vier Quadrokopter
im Fonds Regional d’Art Contemporain Centre (Frac Centre) in Orléans
damit, aus 1.500 Styroporblöcken einen 6 m hohen Turm zu bauen. Es handelt
sich um das weltweit erste Architekturobjekt, das mittels fliegender
Robotereinheiten kollaborativ gebaut wird, und das als Installation einen
Ausblick auf zukünftige Entwurfs- und Fabrikationsmethoden moderner Hochhäuser
bieten soll.
Die Initiatoren der Flight Assembled Architecture sind der Robotik-Prof. Raffaello D’Andrea an der Eidgenössischen Technischen Hochschule in Zürich (ETH), sowie die Architekten Fabio Gramazio und Matthias Kohler.
Die Installation steht zugleich für ein Architekturprojekt, das sich in besonderer Weise mit der Typologie des Hochhauses auseinandersetzt. Dieses gilt seit jeher als zentraler ‚Kristallisationspunkt’ des architektonischen Diskurses und bildet in diesem Fall die Grundlage für eine 600 m hohe Architekturvision namens ‚Vertical Village’ mit einen Innendurchmesser von rund 300 m und Wohnraum für über 30.000 Personen, die mittels des Flying Machine Enabled Construction genannten Konzepts in Frakreich realisiert werden soll.
Bei dem Modell-Turm im Maßstab 1:100 handelt es sich um ein in sich gedrehtes Bauwerk, das Gramazio und Kohler entworfen haben, wobei jeder Block eine dreigeschossige Einheit repräsentiert. Die Quadrokopter, die auf den Humming Birds von Ascending Technologies basieren, schnappen sich an der Ausgabestelle mit einem speziellen Greifer je einen Baustein, erhalten die Daten, an welcher Stelle der Block plaziert werden soll, und transportieren ihn dorthin. Ein unter der Decke montiertes Bewegungserfassungssystem unterstützt die autonom agierenden UAVs: Es erkennt, wo sich diese gerade befinden und dirigiert sie zu ihrem Ziel, ohne daß die Roboter miteinander oder mit dem Turm kollidieren. Die Blöcke sind auf der Unterseite mit einem Klebstoff bestrichen, damit der Turm länger hält.

(Grafik)
Die Ende 2006 von Brian D. Morrison und Bruce
Holmes gegründete Firma Alakai Technologies Corp. in
Hopkinton, Massachusetts, arbeitet an einem alakai one genannten,
elektrisch betriebenen Multikopter für den alltäglichen zivilen sowie
den militärischen Einsatz.
Der sechsmotorige eCopter besitzt eine leichte, Traversen-basierte Zelle sowie sichere, redundante Autopilotsysteme, bietet Platz für zwei Erwachsene plus Gepäck (450 kg im Betrieb unterhalb von 1.000 m Höhe), bezieht seinen Strom aus Wasserstoff-Brennstoffzellen und soll eine maximale Fluggeschwindigkeit von 190 km/h erreichen.
Im August 2011 wird Alakai Technologies zu einer Tochtergesellschaft der kanadischen Firma Guardian Mobility Corp., einem führenden Anbieter von Lösungen für globales Tracking, Sprach- und Datenkommunikation, Flugdatenüberwachung u.ä.m., was auch zu dem Aktivitätsbereich der Alakai Technologies gehört.
Der Multikopter wird im Jahr 2013 zum Patent angemeldet (US-Nr. 20150353192, veröffentlicht 2014). Ob das Projekt weitergeführt wird, ist jedoch unklar.

Ende August 2011 enthüllt AeroVironment das
Ergebnis eines Projektes, bei dem das Unternehmen für die DARPA seit 2008 und
für 4,6 Mio. $ ein senkrecht startendes, unbemanntes Flugobjekt namens Shrike entwickelt
hat – für den Einsatz bei der militärischen Überwachung.
Der 2,27 kg schwere Quadrokopter ist mit einer hochauflösenden Videokamera ausgestattet, die in Echtzeit verschlüsseltes Filmmaterial an den entfernten menschlichen Betreiber übertragen kann. Es kann bis zu 40 Minuten lang sehr ruhig an Ort und Stelle schweben, hat aber auch die Fähigkeit, an diskreten Orten zu landen und von dort über mehrere Stunden Bildmaterial zu übertragen. Ist der Auftrag beendet, startet er vertikal und fliegt zu seiner Basis zurück.
Auf dem im August 2011 stattfindenden Chaos Communication
Camp (CCCamp) in Finowfurt, nahe Berlin, installiert der ebenfalls in
Berlin beheimatete Motodrone e.V. ein ‚Village’, bei
dem es um den Austausch zwischen Universitäten, Bastlern und Visionären
aus dem Bereich des autonomen Fliegens geht. Solche Treffen finden nun
alle vier Jahre statt (davor im Gründungsjahr 2008)
– während die Meisterschaften für autonome Flugobjekte bereits einmal
jährlich veranstaltet werden.

von Chrétien
Im September 2011 fliegt
der Französisch-Australische Ingenieur und berufliche Hubschraubepilot Pascal
Chrétien mit seinem selbstgebauten Elektro-Hubschrauber direkt
ins Guiness Buch der Rekorde – als der erste seiner Art, der es tatsächlich
geschafft hat vom Boden abzuheben. Damit hat er auch das Großunternehmen
Sikorsky überholt (s.o.). Für den Eintrag reichen eine Flugdauer von
nur 2 Minuten und 10 Sekunden in einer Höhe von einem Meter.
Chretien entwarf, baute und testete den aus Aluminiumrohren und einem elektrischen Antrieb samt 160 kWh Lithium-Ionen-Batterien bestehenden Helikopter mit der Unterstützung des französischen Unternehmens Solution F innerhalb von nur einem Jahr. Als nächstes soll nun das Design verbessert und versucht werden, eine Flughöhe von 4 m und eine Flugdauer von 10 bis 12 Minuten zu erreichen. Außerdem ist eine hybride Antriebkonfiguration angedacht.
In diesem Monat wird auch eine völlig neue Form von Flugobjekt bekannt,
daß eine gewisse Ähnlichkeit mit einem ‚Fliegenden Teppich’ hat. Angeregt
von einer bereits 2007 erfolgten Veröffentlichung
der Harvard University, die sich allerdings nur mit den theoretischen
Aspekten der Technologie befaßt hatte, stellen Prof. James
Sturm und sein Doktorand Noah Jafferis an
der Princeton University nach zweijähriger Arbeit
ein 10 cm langes Stück aus transparenter Kunststoff-Folie vor, das
durch eine Art ‚Wellen-Energie’ angetrieben wird. Dabei treiben elektrische
Wellen dünne Luftpolster unter der Folie von vorn nach hinten, wodurch
sich der Prototyp mit einer Geschwindigkeit von etwa 1 cm/s vorwärts
bewegen kann – allerdings nur in Bodennähe Ein Auftrieb kann bislang
noch nicht erzeugt werden.
Jafferis zufolge ist die Funktion des Prototyps hauptsächlich davon begrenzt, daß ihn winzige leitende Fäden an schweren Batterien verankern und er sich deshalb nur ein paar Zentimeter weit bewegen kann. Er arbeitet deshalb bereits an einem solarbetriebenen Modell, das frei über große Distanzen fliegen könnte. Verbesserungen der Konstruktion könnten sowohl für einen aerodynamischen Auftrieb sorgen, als auch die Vortriebsgeschwindigkeit auf 1 m/s erhöhen. Rein rechnerisch würde ein derartiger Flugteppich eine Spannweite von 15 m benötigen, um eine einzelne Person zu befördern. Aber noch ist ja nicht aller Tage Abend.

Im September 2011 und in den Monaten danach überschlägt
sich die Presse mit Kassandra-Rufen, nachdem AeroVironment mit
der US-Army einen weiteren Vertrag über 4,9 Mio. $ für die Entwicklung
und Herstellung von Kampf-Mikrodrohnen namens Switchblade 300 abgeschlossen
hat.
Die 2,2 kg schwere Drohne läßt sich von einer rund 60 cm langen Röhre aus starten, worauf sie im Flug ihre Flügel entfaltet. Angetrieben durch einen Elektromotor fliegt sie leise, mit hoher Geschwindigkeit und überträgt unterdessen mit zwei Kameras Luftbilder an den Piloten am Boden. Die Drohne soll bis zu 40 Minuten in der Luft bleiben und Geschwindigkeiten von bis zu 160 km/h erreichen können. Dabei handelt es sich um ein Einwegsystem: Eine Landung und ein erneuter Start sind nicht möglich.
Im Grunde setzt die Drohne aber das Konzept des Selbstmordattentäters technisch um, denn sie hat keine Waffen an Bord, sondern ist selbst die Waffe: als Kamikaze-Drohne, die in den Gegner hineinfliegt wie ein Geschoß und beim Aufprall oder kurz vorher eine kleine Sprengladung zündet. Die Treffergenauigkeit liegt laut AeroVironment bei rund einem Meter. Mit der kriegstauglichen Mikrodrohne wird der Roboterkrieg vermutlich in eine neue Dimension eintreten, denn sie wird früher oder später auch in die Hände der Gegner fallen – und man braucht nicht viel Phantasie, um sich vorstellen zu können, welche Wunderwaffe solche Kampfdrohnen auch für Attentäter oder Mörder sein können.
Zum Einsatz kommt der Switchblade 300, der in seinem kombinierten Aufbewahrungsrohr/Abschußgerät als Rucksack transportiert und in weniger als zwei Minuten einsatzbereit gemacht werden kann, in erster Linie im Irak und in Afghanistan.
AeroVironment stellt übrigens im Mai 2016 eine unter Wasser einsetzbare Abschußvorrichtung für die Fluggeräte vor, die nun Blackwing Drohnen genannt werden.

(Grafik)
Eine andere kriegerische Minidrohne, für die sich die US-Army interessiert, ist die bereits 2010 von MBDA vorgestellte Drohne TiGER (Tactical Grenade Extended Range). Diese Drohne hat aufblasbare Flügel, ist mit einem Elektromotor ausgestattet, kann bis zu 3 km weit fliegen, einige Minuten über dem Ziel kreisen und dieses dann angreifen. Hierzu führt die Mikrodrohne zwei 40 mm Granaten mit einem Gewicht von 1 kg mit sich, so daß sie nicht nur Menschen töten, sondern auch leichte Fahrzeuge zerstören kann.
Im Oktober 2020 berichten die Blogs über den Nachfolger Switchblade 600, der wesentlich größer ist und über mehr Fähigkeiten verfügt. Der 22,7 kg schwere Flugkörper benötigt etwa 10 Minuten, um in Aktion zu treten und erreicht eine Höchstgeschwindigkeit von 185 km/h. Laut AeroVironment kann die Drohne sowohl leicht gepanzerte Fahrzeuge als auch gehärtete stationäre Ziele jenseits der Sichtlinie bekämpfen. Ihr elektrisches Antriebssystem erlaubt eine Flugzeit von mehr als 40 Minuten und eine Reichweite von bis zu 80 km.
Hinter dem Titel SkyNet verbirgt sich wiederum eine
ferngesteuerte Drohne, die von einem Forschungsteam des Stevens
Institute of Technology entwickelt wird und einen Linux-Computer
sowie eine WiFi-Erkennung an Bord hat, mit denen sie sich aus der Luft
in WiFi-Netzwerke einhacken kann.
Identifiziert die im September erstmals vorgestellte Drohe eine WLAN-Verbindung mittels der eigens programmierten Software, kann sie sich ungehindert einklinken um Daten sammeln oder das Netzwerk gezielt anzugreifen. Dank seiner Solarzellen kann das Gerät die Verbindung sogar über mehrere Stunden aufrecht halten, wobei eine Rückverfolgung des Angriffs nahezu unmöglich ist, da sich die Drohe nicht über Server oder das Internet einwählt, sondern aus der Luft direkt über das interne Netzwerk.
Die Green Flight Challenge der NASA, die Ende September
und Anfang Oktober stattfindet, habe ich ja schon mehrfach erwähnt. Stattfinden
tut sie am CAFE Foundation Flight Test Center auf dem Charles M. Schulz
Sonoma County Airport in Santa Rosa, Kalifornien. Inzwischen hat sich
Google mit der CAFE zusammengetan, um den Wettbewerb mit 1,65 Mio. $
zu sponsern – wobei der Hauptpreis alleine 1,3 Mio. $ schwer ist.
Die restlichen Geldpreise gehen an die vier Zweitplazierten, wobei es sowohl einen Preis für ein erfolgreiches Bio-Kraftstoff-Flugzeug, als auch einen für das leiseste Flugzeug gibt. Insgesamt konkurrieren 13 Teams um den bislang größten Preis in der zivilen Luftfahrt. Sieben der teilnehmenden Flugzeuge sind elektrisch angetrieben, der Rest läuft mit Diesel, Ethanol, Bio-Treibstoff oder mit einem Hybrid-System. Ihre Größe reicht von sehr kleinen Modellen mit einer Spannweite von 5 m, bis zum größten Teilnehmer mit 21 m Spannweite.

Die Batterien der Elektro-Flugzeuge werden mit Strom aus geothermischer Energie von den Feldern der nördlich von Santa Rosa liegenden Mayacama-Bergenheladen. Auch diese Ladestation im CAFE Flight Test Center wird von Google gesponsert. Die teilnehmenden Prototypen werden Anfang Oktober auch der Öffentlichkeit gezeigt.
In den Teildisziplinen Geschwindigkeit und Treibstoffeffizienz belegt der Taurus G4 jeweils den ersten Platz, und in der dritten Teildisziplin, in der das Flugzeug mit der geringsten Geräuschentwicklung honoriert wird, erlangt er den zweiten Platz – sodaß Pipistrel in der Gesamtwertung den 1. Platz belegt und damit den Hauptgewinn in Höhe von 1,35 Mio. $ mit nach Hause nehmen kann. Das Team des e-Genius bekommt für den 2. Platz ein Preisgeld von 120.000 $, sowie weitere 10.000 $ in Form eines Lindbergh-Preises für das leiseste Flugzeug.
Aufgrund der geschichtlichen Relevanz dieses Wettbewerbs – zumindest für die USA – soll nachstehend eine Liste aller ursprünglichen Teilnehmer und ihrer Flugzeuge aufgeführt werden. Es ist allerdings darauf hinzuweisen, daß von den eigentlich angemeldeten 14 Teams tatsächlich nur VIER in Kalifornien mit dabei sind, von denen wiederum nur drei die Bedingungen des Wettbewerbs erfüllen.
Team/Leiter |
Name des Flugzeugs |
Herkunft |
Zahl der Sitze |
Max. Leistung (kW) |
Spannweite (m) |
Energieform |
Einar Enevoldson / PC Aero |
Elektra 1 |
CA |
1 |
21 |
8,4 |
Elektrisch |
Gene Sheehan / Feuling GFC |
Team Feuling GFC |
CA |
1 |
16 |
5,0 |
Elektrisch |
Gregory Cole / Windward Performance |
Goshawk |
OR |
2S |
na |
15,4 |
Elektrisch |
Lawrence Speer / Green-Elis |
Greenelis PXLD |
CA |
2S |
30 |
10,8 |
Diesel |
Mike Stude / Michael Stude |
Wings of Salvacion |
KS |
1 |
32 |
5,0 |
Ethanol |
Richard Anderson / Embry-Riddle Aeronautical University |
EcoEagle |
FL |
2S |
100 |
22,8 |
Hybrid |
John W. McGinnis / Synergy |
Synergy |
MT |
6 |
142 |
9,7 |
Biodiesel |
Greg Stevenson / GSE-Aerochia |
Econo-Cruiser 3000 |
CA |
2T |
15 |
14,7 |
Biokraftstoff-Hybrid |
Ira Munn / IKE Aerospace |
SERAPH |
CA |
1 |
30 |
4,5 |
Biodiesel-Hybrid |
Eric Raymond / e-Genius |
e-Genius |
CA (*) |
2S |
60 |
16,9 |
Elektrisch |
Jim Lee / Phoenix Air |
PhoEnix |
FL |
2S |
44 |
14,4 |
Elektrisch |
Scott Sanford / Yuneec |
Yuneec E 1000 |
CA |
3 |
120 |
17,0 |
Elektrisch |
Jack Langelaan / Pipistrel- Penn State University |
Taurus G4 |
PA (*) |
4 |
145 |
21,0 |
Elektrisch |
(*) Es ist mir nicht klar, warum das deutsche Flugzeug e-Genius als kalifornischer Teilnehmer bezeichnet wird. Der slowenische Hersteller wiederum beteiligt sich gemeinsam mit der Penn State University – vermutlich um als ‚amerikanischer’ Teilnehmer mitmachen zu dürfen.
(Grafik)
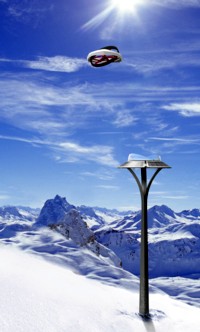
Die Produktdesignerin Tatjana Rolle aus Frankfurt am
Main stellt im Oktober 2011 in den Fachblogs ihre Diplomarbeit
an der HfG Offenbach vor: Ein autonomes, Dronen-basiertes
System zum Auffinden von Lawinenopfern, das aus einem Netzwerk aus Sensoren
und Drohnen auf ihren Basisstationen besteht, die in lawinengefährdeten
Zonen installiert werden.
Unmittelbar nach der Lawine verläßt der Lawinenschutz-Assistent AARA (Airborne Avalanche Rescue Assistant) seine von einer Kuppel geschützten Solartankstelle, durchsucht die Gegend und markiert die Positionen potentieller Opfer mit leuchtenden Farben, sodaß die Retter die Opfer unverzüglich freischaufeln können. Die Drohne ist hierfür mit einer GPS-Navigation und einem Ultraschallsensor zur Abstandsmessung ausgestattet.
Ebenfalls im Oktober gelingt der weltweit erste bemannte Flug mit einem
rein elektrisch betriebenen und senkrecht startenden Volocopter
VC1. Die Idee geht auf den Physiker Thomas Senkel zurück,
und entwickelt wurde das clevere und höchst anerkennungswürdige Teil
in einem Zeitraum von nur zwei Jahren von Senkels extra hierfür gegründeten
Firma e-volo GmbH in Karlsruhe.
Ursprünglich nur für unbemannte Testflüge vorgesehen, erweisen sich die Flugeigenschaften dann jedoch als so zuverlässig, daß das Risiko eines bemannten Fluges eingegangen wird – mit großem Erfolg. Der Volocopter kann senkrecht in die Luft steigen und punktgenau seine Position halten. Für den Auftrieb sorgen 16 Propeller, die durch gezielte Drehzahländerung für die nötige Stabilität und die Steuerung in der Luft sorgen.

VC1
Die sehr einfache Steuerung erfolgt mit einem Joystick nach dem Prinzip des Fly-by-wire. Im Unterschied zu jedem anderem Fluggerät muß sich der Pilot keinerlei Gedanken um Gleitwinkel, Mindestgeschwindigkeiten, Strömungsabriß oder viele andere Dinge machen, denn die automatische Lageregelung und die Richtungssteuerung erfolgt mit mehreren unabhängigen und sich gegenseitig überwachenden Bordcomputern, die jeden Motor separat in seiner Drehzahl regeln. Selbst bei einem Ausfall mehrerer Motoren kann der Elektro-Heli immer noch sicher gelandet werden.
Mit seinen vier Auslegern mißt er rund 5 x 5 m, und das Leergewicht inklusive Akkus beträgt etwa 80 kg. Damit ist derzeit eine Flugdauer von ca. 20 Minuten realisierbar, wobei das System mit 6 € Stromkosten hypothetisch eine ganze Stunde in der Luft bleiben könnte. Ein kleines Detail: Man beachte bitte den sinnvollen und absolut tauglichen Einsatz des Gymnastikballs als Landepuffer.
Das Team der e-volo GmbH arbeitet bereits an einem 2-sitzigen Volocopter, der als seriell-hybrides Elektrofluggerät entwickelt wird, um Flugzeiten von mehreren Stunden zu realisieren. Hierzu wird ein Verbrennungsmotor einen Generator antreiben, der wiederum den Akkumulator und die Elektromotoren mit Strom versorgt. Ein optionaler zusätzlicher Schubantrieb soll ein noch schnelleres Fliegen ermöglichen. Außerdem sollen die Volocopter mit einem Gesamtrettungssystem in Form eines Fallschirms ausgestattet werden, an dem das komplette Fluggerät im Notfall sicher zu Boden sinken kann.
Die weitere Dokumentation der Entwicklung des Volocopter erfolgt in den jeweiligen Jahresübersichten ab 2012 (s.d.).

ELHASPA
Im November 2011 hebt im Rahmen des Projektes Solar
Powered High Altitude and Long Endurance (HALE) des Deutschen
Zentrums für Luft- und Raumfahrttechnik (DLR) ein elektrisch betriebener,
fliegender Roboter zu seinem Erstflug von einer halben Minute ab, der
zukünftig in zirka 15 km Höhe fliegen und dort verschiedene Meßdaten
erfassen soll, wie sie sonst nur von Satelliten gewonnen werden.
Das erste Flugzeug aus diesem Projekt, das unter dem Namen ELHASPA (Electric High Altitude Solar Powered Aircraft) bekannt wird, hat eine Spannweite von 23 m, ist 10 m lang, wiegt zirka 100 kg und kann eine 5 kg schwere Nutzlast tragen. Der Flieger wird von zwei Propellern mit jeweils einem 2 kW Motor angetrieben, die über Solarzellen auf der Tragfläche mit Energie versorgt werden. Das unbemannte Kleinflugzeug und seine Systeme werden in Zusammenarbeit mit mehreren Unternehmen der Luftfahrtindustrie einschließlich EADS-Astrium, EADS-Cassidian, der Steinbeis Flugzeug- und Leichtbau GmbH und Roedelmodell entwickelt und hergestellt.
Im November 2011 startet unter der Leitung von Prof. Aníbal
Ollero an der Universität Sevilla das mit 6,15
Mio. € geförderte EU-Projekt Aerial Robotics Cooperative Assembly
System (ARCAS), bei dem ein Konsortium von Robotikprofessoren
aus ganz Europa zusammenarbeiten, um den kooperativen Roboterflug zu
nutzen, reale Strukturen aufzubauen. Mit Hilfe kooperativer Steuerungstechniken
soll ermöglicht werden, das Gewicht der getragenen Strukturen über einen
Roboterzug zu teilen und damit die Gesamtnutzlast weiter zu erhöhen.
Als Beispiele für das Potential der Luft-Robotik werden der Bau von Plattformen für die Evakuierung von Menschen in Rettungseinsätzen, die Installation von Plattformen in unebenem Gelände für die Landung von bemannten und unbemannten VTOL-Flugzeugen sowie die kooperative Inspektion und Instandhaltung genannt.

(Grafik)
Im Dezember wird Wesam Al Sabban, ein aus Saudi-Arabien
stammender Doktorand an der Queensland University of Technology,
für seinen von Wind- und Sonnenenergie angetriebenen unbemannten Green
Falcon 11 mit einem Genius Prize ehrenhalber der Ungarischen
Erfinder-Union (MAFE) ausgezeichnet.
Im Gegensatz zu vielen anderen Solarfliegern ist der Falke mit einer künstlichen Intelligenz ausgestattet, um die Sonnenintensität zur Stromversorgung zu prognostizieren und die bestehenden Windverhältnisse für die Bahnplanung zu verwenden. Grundlage dafür ist die Doktorarbeit des Gaststudenten, in deren Zuge er untersucht hat, wie Vögel die Windenergie nutzen, um mit einem Minimum an Energie fliegen, und sämtliche Arten von Wind dazu verwenden, um zu gleiten und ihre Flugbahn zu ändern. Für das endgültige Design werden noch etwa achtzehn Monate veranschlagt, doch schon jetzt wird nach Partnern gesucht, um das neue UAV-Design bis zum Jahr 2013 zu kommerzialisieren.

Ende des Monats gibt es wieder einmal einen Erstflug zu vermelden. Diesmal
handelt es sich um einen ultraleichten elektrischen Motorgleiter
von Electravia namens ElectroLight2,
der mit seinem 26 PS E-Motor vom Flugplatz Sisteron aus, wo die Firma
ansässig ist, zu einem 20-minütigen Flug startet.
Das Unternehmen will sein neues Modell mit drei unterschiedlichen Akku-Packs zwischen 2,3 kWh und 5,55 kWh anbieten, wobei die stärkste Variante eine Flugzeit von 1 Stunde und 45 Minuten erlaubt, eine maximale Flughöhe von 3.000 Fuß und eine Reisegeschwindigkeit von bis zu 240 km/h. (Auf der Electravia-Hompage wird 2013 ein Preis von rund 33.000 € angegeben).
Anfang Dezember 2011 führt eine automatische Flugdrohne
namens Tempest acht Testflüge durch, bei denen sie an
der Unterseite ihrer Flügel zwei weitere, kleinere Drohnen mit sich führt.
Der Träger wird von einem Wetterballon auf eine Höhe von 17.374 m gehievt
und dann freigegeben, um zu einem vorgegebenen Ziel zu fliegen.

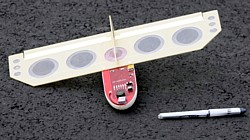
Unterwegs werden dann die beiden CICADAs (Zikaden) von den Flügeln abgekoppelt, um ebenfalls zu vorgegebenen Zielpunkten zu fliegen, wo sie innerhalb eines Radius von nur 4,6 m äußerst präzise landen. Die Mini-UAVs wurden vom U.S. Naval Research Laboratory (NRL) entwickelt und erstmals im September getestet, um Sensoren hinter feindlichen Linien abzusetzen, wie es das Militär ausdrückt. CICADA steht dabei für Close-In Covert Autonomous Disposable Aircraft.
Die kleinen Einfügler bestehen im Grunde aus einer Leiterplatte, die gleichzeitig als Autopilot fungiert. Dieser Ansatz minimiert Montagezeit, Verdrahtungs- und Herstellungsaufwand, während er ebenso die Robustheit steigert. Je nachdem, welche Art von elektronischer Nutzlast solch eine Zikade tragen soll, kann sie aus einem entsprechend bedruckten Flügel konstruiert werden.
Der Tempest-Träger (Tempest Unmanned Aircraft System, UAS), der seine ersten Starts mittels Gummiseil-Katapult bereits im Oktober 2009 durchgeführt hatte, kommt allerdings aus der zivilen Forschung, wo er von Jack Elston, Maciej Stachura und Tom Aune von der University of Colorado at Boulder für Flüge in schweren Stürmen entwickelt wurde, um innerhalb konvektiver Extremereignisse wie Gewitter-Superzellen und Tornados in-situ Messungen durchzuführen.
Das elektrisch angetriebene und 5,4 kg schwere unbemannte Flugzeug, das eine Spannweite von 3,2 m hat und eine Maximalgeschwindigkeit von 35 m/s erreicht, wird per Funkfernsteuerung gestartet, um dann in einen autonomen Modus zu wechseln, der von der Kontrollstation und dem Verfolgungsfahrzeug am Boden überwacht wird. Auf der Seite tornadochaser.colorado.edu sind die interessanten Einsätze seit der Premiere im Mai 2010 recht gut dokumentiert. Der zweijährige Feldversuch läuft unter dem Namen VORTEX 2.

Was die etwa handgroße Wegwerfdrohne CICADA selbst anbelangt, so erscheint diese im Mai 2017 wieder in der Presse. Das aktuelle Modell mk5 wiegt rund 65 g und besteht im Wesentlichen aus einem 3D-gedruckten Rumpf sowie einer Platine, die auch die ,Flügel‘ bildet. Auf jeder Seite gibt es ein bewegliches Querruder, das von einem Autopiloten mittels von GPS und Gyroskop gesteuert wird.
Weil die Drohne aus der Luft abgeworfen wird, z.B. aus Flugzeugen, Hubschraubern oder von Fallschirmspringern, hat sie keinen eigenen Antrieb. Einem NRL-Forscher zufolge seien die Zikaden bereits über 200 mal geflogen und hätten auch bei Windgeschwindigkeiten von bis zu 74 km/h gut funktioniert. Eine mk5 legt pro Minute gut 900 m zurück und verliert dabei etwa 300 m Höhe.
Soweit bekannt ist, wurden die Minidrohnen bisher mit Wettersensoren für Luftdruck, Temperatur und Luftfeuchtigkeit bestückt, zudem wurde während des Sinkfluges ein Windprofil erstellt. Die erhobenen Daten sind dann mittels Mobilfunkmodul per SMS nach Hause geschickt worden. Sofern Sichtverbindungen mit maximal 1,5 km Distanz gegeben sind, kann ein Zikadenschwarm auch ein Mesh-Funknetz bilden und so seine Meßdaten laufend in Echtzeit übermitteln.
In diesem Jahr 2011 wird auch die Equator Aircraft
Norway SA gegeründet, eine norwegische genossenschaftliche Organisation,
deren Ziel es ist ein Null-Emissions-Flugzeug zu entwickeln, das durch
einen elektrischen Motor angetrieben wird. Die Mitglieder tragen auf
freiwilliger Basis zur Vollendung des Flugzeugs bei.

(Grafik)
Die Sache geht auf den Flugzeugkonstrukteur Günter Pöschel zurück, der 1967 damit begann, ein modulares Amphibienflugzeug P 300 mit Druckkabine für sechs bis acht Passagiere zu bauen.
Der Erstflug findet im Februar 1971 bei der DFVLR in Oberpfaffenhofen statt, bringt aber so erhebliche Probleme mit sich, daß die Maschine trotz einiger Umbauten 1975 stillgelegt wird. Der zweite Prototyp wird bei einem Testflug 1977 bei einem Unfall zerstört, während der dritte, nun zum Mitteldecker umkonstruierte Prototyp 1979 gebaut und ausgestellt wird. Zur Flugerprobung und zum Serienbau kommt es jedoch nicht mehr, da Pöschel und seiner Firma Pöschel Aircraft inzwischen die finanziellen Mittel ausgegangen sind.
Als der Norweger Tomas Brødreskift, ein Industriedesign-Student der Oslo School of Architecture and Design (AHO), im Jahr 2008 in Süddeutschland Günter Pöschel trifft, dauert es nicht lange, bis Brødreskift gemeinsam mit seinem Partner Øyvind Berven – beide sind Hobbypiloten – damit beginnt, das Konzept einer hybrid-elektrisch angetriebenen Version zu entwickeln, der EQ P2 Excursion, deren Erstflug bereits 2014 stattfinden soll.

Das durch Equator entwickelte Hybrid-Antriebssystem heißt EHPS (Equator Hybrid Propulsion System), wird von Transnova mitfinanziert und gemeinsam mit dem deutschen Elektromotor-Spezialisten ENGIRO GmbH aus Aachen konzipiert.
Es basiert auf einem speziell entworfenen Wankelmotor mit einer Leistung von 100 kW, der sowohl mit Biodiesel-Kraftstoffen als auch mit Jet-Treibstoff funktioniert, und dessen Generator zum Aufladen der Batterien ca. 60 kW Leistung produziert. Mit einem 100 Liter Kraftstofftank soll eine Flugzeit von 5 - 6 Stunden möglich sein. Das Design des 2-Sitzers sieht ein maximales Startgewicht von 690 kg vor, bei einer Flugzeuglänge von 6,2 m, einer Höhe von 2,65 m und einer Spannweite von 9 m.
Das neue P2-Konzept wird Anfang 2010 als Diplom-Projekt an der AHO abgeschlossen und anschließend als Teilzeitprojekt weitergeführt – bis zur Gründung der Equator Aircraft. In der Folgezeit werden mehrere Design-Iterationen gemacht, darunter auch ein fliegender Prototyp im Maßstab 1: 4 (V1 EKST), von dem es aber anscheinend keine Fotos gibt. Die endgültige Designversion 4 wird Mitte 2011 fertiggestellt.
Der für 2014 geplante Erstflug wird dann auf 2015 verschoben, doch auch dies ist nicht zu schaffen. Erst nach etwa 7 Jahren der Entwicklung und rund 20.000 freiwillige Arbeitsstunden kann im März 2017 das flugbereite Modell vorgestellt werden, das in den Folgemonaten in die Erprobung gehen soll.

(Detail)
Im Juni/Juli 2018 erfolgt anläßlich der Farnborough International Airshow endlich der Jungfernflug des Elektro-Hybrid-Wasserflugzeug-Prototypen P2 Xcursion. Der Flug selbst startet allerdings von einer Startbahn des norwegischen Technologieparks Eggemoen. Die Maschine startet mit 130 km/h und fliegt dann mit 185 km/h in einer Höhe von etwa 9 m. Am nächsten Tag folgten zwei weitere Testflüge, was den eigentlichen Beginn des Flugzeug-Testprogramms markiert.
Das Flugzeug aus Kohlefaser/Kevlar-Verbundwerkstoff bietet Platz für zwei Personen, hat ein maximales Abfluggewicht von 750 kg und kann eine Nutzlast von 240 kg tragen. Das Fahrwerk fährt in die Zelle ein, und der Propeller ist ein DUC Flash, der von einem Engiro M97 Elektromotor angetrieben wird, der nur 32 kg auf die Waage bringt und eine Leistung von 97 kW hat. Als Generator ist ein wassergekühlter Engiro G60 verbaut, der bei 6,8 kg Gewicht bis zu 60 kW Leistung erzeugen kann, während das Kraftwerk des Systems ein WST-Wankel-Dieselmotor ist, der eine Leistung von 57 kW erzeugt und 45 kg wiegt.
Für die Testflüge wird ein LiPo-Pack mit einer Speicherkapazität von 18 kWh verwendet, während in der kommerziellen Version der Equator P2 Xcursion ein 6 kWh Li-Ionen-Paket mit einem Gewicht von 32 kg verwendet werden soll.
Im April 2019 folgt die Meldung, daß der Prototyp des Amphibienflugzeugs nach Bestehen eines Audits durch die norwegische CAA Ende des Vormonats mit dem Testpiloten Eskil Amdal am Steuer über dem Technologiepark Eggemoen in Norwegen zum ersten Mal vollständig in die Luft gegangen sei. Der 10-minütige Flug, bei dem das Flugzeug Manövern unterzogen wird, um die Steuerbarkeit sowie die statische und dynamische Stabilität zu testen, wird rein elektrisch durchgeführt.
Mit 100 kg Lithium-Ionen-Batterien und dem 97 kW starken ENGIRO M97 Elektromotor wird eine Gesamtflugdauer von etwa 35 Minuten erreicht. Equator Aircraft zufolge würden spätere Versionen allerdings in der Lage sein, 105 Minuten in der Luft zu bleiben. Bei Hinzuschaltung des Wankel-Dieselmotors und des Energio-Generators zur Stromversorgung soll es sogar bis zu sechs Stunden lang fliegen können. Die P2 Xcursion hat eine maximale Reisegeschwindigkeit von 241 km/h.

Im Jahr 2011 beginnt in Christchurch, Neuseeland, eine
Zusammenarbeit zwischen der University of Canterbury,
dem Ministry of Science and Technology sowie den Firmen Canterbury
Sailplanes und 2C Light Company (Hersteller
des 2C Solar Light Cap, s.o. 2009), bei der es um die
Entwicklung einer solarbetriebenen Drohne geht. Federführend ist Simon
Dyer, Gründer und Chef der 2C Light Co.
Das 2C Solar Drone (oder Solar Unpiloted Aerial Vehicle) genannte Flugzeug soll ein kleiner und leichter Elektrosegler werden, der nur von Photovoltaik-Solarzellen angetrieben wird und in der Lage ist, eine kleine Nutzlast zu tragen. Ein späteres, kommerzielles Design soll dann Tag und Nacht in der Luft bleiben können, um Kommunikationsdienstleistungen bieten zu können.
Es gibt zwar einige Fotos vom Juli 2013, auf denen ein mit Solarzellen belegter Flügel von mehreren Metern Spannweite zu sehen ist, weiter scheint man aber noch nicht gekommen zu sein.
Ende 2011 kommt in den USA ein neuer Begriff auf, der
es auch sehr schnell nach Deutschland schafft: Drohnenjournalismus.
Zu den ersten plakativen ‚Fällen’ gehören die Anfang des Jahres mit einer
Drohne gemachten Aufnahmen der durch einen Tornado teilweise zerstörten
Stadt Tuscaloosa in Arizona, die von der speziell für das iPad entwickelten
Zeitung The Daily exklusiv öffentlich gemacht werden; die Bilder der
Auseinandersetzungen zwischen Polizei und Demonstranten am polnischen
Unabhängigkeitstag im November in Warschau, die von einem kleinen Quadrokopter
der Firma Robokopter aufgenomen werden; sowie die Panoramaaufnahmen der
Demonstrationen nach den Wahlen im Dezember in Rußland, die der Blogger
Stanislaw Sedow von seinem ferngesteuerten Helikopter live ins Internet
gestreamt werden.
Es ist daher nicht verwunderlich, daß schon im November am Lincoln College of Journalism and Mass Communications der University of Nebraska-Lincoln das Drone Journalism Lab gegründet wird – die erste universitäre Ausbildungsstätte, die gezielt Drohnenjournalisten ausbilden und eine Ethik ihres Handels entwickeln will.
Weiter mit den Elektro- und Solarfluggeräten...