Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2008
Nach vierjähriger Entwicklungsarbeit startet im
Februar 2008 der Prototyp eines unbemannten, autonomen
Kleinflugzeugs zu seinem Jungfernflug.

Im Gegensatz zu vielen seiner Vorgänger besitzt dieser Flieger vier elektrisch angetriebene Rotoren, die an Schwenkflügeln sitzen. Die Entwicklung erfolgt an der Chiba University, finanziert wird das ganze von der bereits 1970 gegründeten japanischen Firma GH Craft Ltd. in Teijin, einem Spezialisten für Yachten und Kompositwerkstoffe, der sich auch mit erneuerbarer Energie und Elektrofahrzeugen beschäftigt.
Das Quad Tilt Wing (QTW) absolviert erfolgreich und selbständig Starts, Flugmanöver und Landungen, ist 1 m lang, hat eine Flügelspannweite von 1 m, wiegt 23 kg und kann eine Nutzlast bis zu 5 kg befördern. Die bislang erreichte Höchstgeschwindigkeit beträgt 150 km/h. Mit der gegenwärtigen (ungenannten) Batteriekonfiguration ist eine Flugzeit von 15 min. möglich. Das Unternehmen plant nun, auch ein kleineres, nur 500 g schweres Modell zu entwickeln.
Im Februar und März 2008 fliegt
auch erstmals ein von den Boeing Phantom Works und europäischen Partnern
entwickeltes Elektroflugzeug, an dem die Boeing Research and Technology
Europe (BR&TE) in Madrid seit 2003 arbeitet.

EC-003
Diese Partner sind die Firma Diamond Aircraft Industries (Österreich), Gore und MT Propeller (Deutschland), SAFT France (Frankreich), Intelligent Energy (England), UQM Technologies (USA) sowie die spanischen Firmen Adventia, Aerlyper, Air Liquide Spain, Indra, Ingeniería de Instrumentación y Control (IIC), Inventia, SENASA, Swagelok, Técnicas Aeronauticas de Madrid (TAM), Tecnobit sowie die Universidad Politécnica de Madrid und die Regionalregierung von Madrid.
Der zweisitzige Hybridflieger mit der Kennung EC-003, der drei Mal vom Flugfeld Ocaña im Süden von Madrid abhebt, ist neben den Li-Io-Batterien auch mit einer 20 kW PEMFC-Brennstoffzelle der britischen Firma Intelligent Energy ausgestattet. Die Akkus sollen insbesondere beim Takeoff und Steigflug für zusätzliche Leistung sorgen. Während des regulären Flugs wird der Elektromotor ausschließlich von der Brennstoffzelle versorgt.
Das Flugzeug ist ein Umbau des Motorgleiter-Modells Dimona aus österreichischer Herstellung, mit einer Spannweite von 16,3 m. Bei den Testflügen unter der Leitung des spanischen Unternehmens SENASA wird eine Flughöhe von 3.300 Fuß (1.000 m) erreicht, die Fluggeschwindigkeit im Brennstoffzellenbetrieb beträgt rund 100 km/h, und die Flugzeit wird mit rund 20 min. angegeben. Die potentielle Flugzeit soll sogar 45 min. betragen. Eine kommerzielle Umsetzung soll in 10 – 15 Jahren erfolgen.

Im März 2008 hört man wieder etwas von den unbemannten Elektrofliegern der NASA und der Firma AeroVironment (AV). Diesmal heißt
das SUAV Puma und soll im Auftrag der DARPA langfristig bis zu 5 Jahre ohne Unterbrechung im Luftraum kreisen. Der autonome Flieger wiegt 450 kg, hat eine 5 kW Bordversorgung und kann in einer Höhe von 60.000 bis 90.000 Fuß fliegen.
Neben der Standardlösung untersucht man allerdings auch ein modulares Konzept, bei dem einzelne Teilstücke des Fliegers selbständig zur Erde zurückkehren können. Nun führt der von Brennstoffzellen betriebene Puma einen neunstündigen Testflug durch und übertrifft damit seinen bisherigen 7-stündigen Rekord vom Juli 2007. Der Einsatzbereich liegt wie auch bei den anderen Produkten von AeroVironment im militärischen Sektor.

Ebenfalls im März 2008 präsentiert
der ehemalige Linienpilot und Airlines-Besitzer James
Milner sein Flugauto AirCar, an dem er bereits seit 2005 arbeitet
und mit dem er bald die ersten Testflüge unternehmen will. Ansätze
zur Entwicklung derartiger Flugautos gibt es seit bald 100 Jahren – ich
verfolge sie hier jedoch nicht, da ihre Antriebstechniken bislang zumeist
auf Brennstoffen beruhen.
Die in Washington beheimatete Firma Milner Motors stellt auf der New York auto show allerdings auch die (flugunfähige) Grundversion ElectriCar vor – der die Flügel und die Turbinen fehlen –, und die mit seiner 11 kWh Batterie und zwei 15 PS Elektromotoren 160 km weit kommt, bei einer Geschwindigkeit von bis zu 140 km/h.
Das hier wesentlich mehr interessierende Flugmodell soll US-typisch als Bausatz angeboten werden, zumindest bis die beantragte Sicherheitszertifizierung auch den Verkauf eines fertigen Vehikels erlaubt. Der in New York gezeigte 4-türige Prototyp mit seiner (einklappbaren) Spannweite von 8,5 m ist allerdings noch nicht flugtauglich. Fertig entwickelt soll das AirCar mit einer Geschwindigkeit von 320 km/h eine Reichweite von bis zu 1.600 km haben – unter Einsatz von zwei konventionellen Flugzeugmotoren mit Druckschrauben und zusammen 300 PS.

(Grafik)
Den weltweit ersten hybrid-elektrisch betriebenen Hubschrauber mit
Schwenkpropellern stellt Simon Scott, Inhaber des britischen Unternehmens
Falx Air Vehicles aus Staffordshire im April 2008 vor.
Neben einem 100 PS Verbrennungsmotor, der den leichten und bürstenlosen Elektrogenerator antreibt, besitzt der 5,13 m lange Hubschrauber mit seiner Spannweite von 5,58 m auch noch Solarpaneele zum Nachladen der Batterien. Er soll als 1- und als 2-sitzer angeboten werden, was einem Leergewicht von 350 bzw. 405 kg entspricht. Die Reisegeschwindigkeit beträgt 290 km/h, die Spitzengeschwindigkeit 430 km/h, und die Reichweite 700 km.
Die vollständige Zertifizierung soll Ende 2009 abgeschlossen sein, um 2010 auf den Markt kommen zu können – zu einem Preis von rund 1,5 Mio. $.

(Grafik)
Im April 2008 gibt die
US-Firma Aurora Flight Sciences aus Manassas, Virginia, bekannt,
daß sie im Rahmen des Programms Vulture der Defense
Advanced Research Projects Agency (DARPA) den Vertrag zur Entwicklung
eines Solar-Fliegers abgeschlossen habe, der in
einer Höhe von 20 km – 30 km bis zu fünf Jahre ununterbrochen
in der Luft verbleiben kann.
Vulture steht dabei für Very-high altitude, Ultra-endurance, Loitering Theatre Unmanned Reconnaissance Element. Das System soll es dem Militär außerdem ermöglichen, Nutzlasten mit einem Gewicht bis zu 450 kg ununterbrochen mit bis zu 5 kW Leistung zu versorgen.
Auch der geplante Odysseus von Aurora soll mit Solarenergie betrieben werden, wobei tagsüber auch genügend Energie für den Nachtbetrieb gespeichert wird. Partner des Projekts sind die Firmen BAE Systems, die C.S. Draper Laboratories und die Sierra Nevada Corporation.

(Grafik)
Den veröffentlichten Animationen zufolge soll die Konstruktion in Form von drei selbständigen Solarflugzeugen mit einer Spannweite von jeweils 50 m und drei elektrisch betriebenen Propellern abheben, die sich erst auf ihrer Betriebshöhe zu einem einzigen Flieger zusammenkoppeln.
Beim Flug im Sonnenlicht nimmt der Odysseus eine Zickzackform an, damit zwei der mit Solarzellen belegten Flügel optimale Einstrahlbedingungen erreichen, während er sich nachts einflächig ausstreckt, um die Aerodynamik zu optimieren. Außerdem besteht die Möglichkeit, die Komponenten (die jeweils auch das Gesamtsystem kontrollieren können) dadurch einzeln wieder landen zu lassen, um sie z.B. technisch aufzurüsten oder zu reparieren, während der Restverbund weiterhin im Einsatz ist.

(im Bau)
Die Forscher untersuchen derzeit Möglichkeiten für verschiedene Arten der Energiespeicherung für das auch Z-Wing genannte Flugzeug, zu den ins Auge gefaßten Methoden gehören neben Batterien auch Brennstoffzellen und sogar Schwungräder. Flugbereit sein soll der Odysseus in etwa fünf Jahren.
Tatsächlich dauert es wesentlich länger, bis sich der Odysseus in die Luft erhebt. Ursprünglich soll der Erstflug im April 2019 in Puerto Rico stattfinden, doch dies muß aus nicht genannten Gründen verschoben werden. Die Flügelspannweite des Fliegers beträgt nun 74,1 m, und das Gewicht der Nutzlast 25 kg. Er kann auf eine Höhe von mehr als 20 km aufsteigen und drei Monate lang in der Luft bleiben. Allerdings scheint man inzwischen von der Zickzackform aus drei selbständigen Solarflugzeugen abgekommen zu sein.
Das Projekt wird 2019 auf unbestimmte Zeit verschoben, weitere Neuigkeiten gibt es nicht. Die Aurora Flight Sciences war übrigens im November 2017 von Boeing übernommen worden.

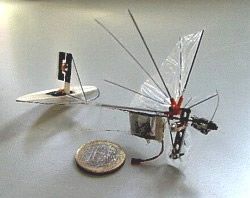
Die Presse berichtet im April 2008,
daß Wissenschaftlern am Mechanical Systems Laboratory an der University
of Delaware einen Mechanismus entwickelt haben, mit dem es
möglich ist die Flügelschlagbewegungen von Vögeln nachzuahmen und mit
dieser Technik und mit einem einzigen Antriebsmechanismus Mini-Flugzeuge
zu lenken.
Mit Hilfe einer hauptsächlich von Zaeem A. Khan und Sunil Agrawal entwickelten und zum Patent angemeldeten Methode ist es möglich, Windstöße auszugleichen und das Fluggerät auf Kurs zu halten – eines der bislang größten Probleme beim Einsatz der MAVs mit ihren Flügelspannweitern von weniger als 15 cm. Hier abgebildet ist das Modell Sparrow FWMAV.
Der Swift-Light ist ein fußstartfähiger
Hängegleiter, der die Lücke zwischen Drachen und Segelflugzeug schließt.
Der Nurflügler kostet zwischen 13.000 € und 16.500 €. Der für den Vertrieb
in Österreich und Deutschland verantwortliche Weltrekordhalter und
Weltmeister Manfred Ruhmer und seine Firma RuhmAIR
UL-Leichtflugzeuge im österreichischen St.Oswald bei Freistadt beschäftigen sich auch
mit der Möglichkeit, den Swift-Light mit einem Elektroantrieb auszustatten.

Bereits 2007 wird ein bürstenloser Außenläufer für einen Paramotor erfolgreich getestet und geflogen, den Dr. Ing. Werner Eck aus Heiligenstadt entwickelt hat. Mit einem Gewicht von gerade 3,75 kg und einer Drehzahl von ca. 2.000 U/m ist er in der Lage, auch relativ große Luftschrauben direkt anzutreiben. Er hat eine Dauerleistung von 8 kW und eine Kurzzeitleistung von über 10 kW. Einen speziellen Elektro-(falt)Propeller mit 1,4 m Durchmesser und gutem Wirkungsgrad läßt Eck bei der Firma Helix fertigen.
Im April 2008 berichtet Ruhmer, daß er sich von der First-Products Ltd. & Co. KG in Tangstedt ein Akkupack hat anfertigen lassen, das auf den neuen Li-Io-FePO4 Akkus von A123 Systems beruht, die sich durch ihre Schnellladefähigkeit in nur 15 min. und eine hohe Zyklenzahl von über 1.000 Lade- und Entladezyklen auszeichnen. Die insgesamt 144 Zellen des 58 V / 20,7 Ah Packs haben ein Gewicht von 12,5 kg. Mit einer Leistung von 1.100 Wh soll damit eine Steigflughöhe von etwa 600 m – 800 m über Grund erreichbar werden, was bei ruhigem Wetter einer Flugzeit von 20 - 30 Minuten entspricht. Es werden diverse erfolgreiche Flüge durchgeführt, aktuellere Neuigkeiten gibt es allerdings noch nicht.

(Grafik)
Ende April 2008 findet
in San Francisco das 2. Electric Aircraft Symposium der CAFE Foundation
statt.
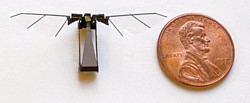
Im Mai 2008 arbeitet die uns schon
mehrmals begegnete US-Firma AeroVironment an einem Nano
Ornithopter,
der zeitweilig als weltweit kleinstes UAV gilt. Immerhin steckt die
DARPA rund eine halbe Million Dollar in diese Entwicklung, die sich
durch Klappflügel auszeichnet, nur 7,5 cm lang ist und weniger als
10 g wiegt. Das Unternehmen hat nun 6 Monate Zeit nachzuweisen, daß
das Mikro-UAV den (militärisch motivierten) Zielsetzungen der DARPA
entspricht.
Im Juni 2008 stellt das Unternehmen außerdem das Konzept eines Very Light Hybrid Transport (VLHT) Hubschraubers vor, der auf demselben Grundkonzept beruht, allerdings etwas größer dimensioniert ist (10,5 m lang, Spannweite 10,3 m, Leergewicht 800 kg, Zuladung 650 kg).
Über das Gesamtkonzept des Solar/Wasserstoff-Hybridflugzeugs Hy-Bird,
das erstmals im Mai 2008 öffentlich vorgestellt
wird, spreche ich noch ausführlicher im Kapitel Wasserstoff.
Für den geplanten Flug rund um die Welt mit einer Reisegeschwindigkeit
von 150 km/h werden 15 kW benötigt, die von einer 19 kW Brennstoffzelle
geliefert werden sollen. Die zum Starten und für den Steigflug
des 1,1 t wiegenden Flugzeugs benötigten Leistungsspitzen von
45 kW werden von einem Lithium-Polymer-Akku gestellt, der während
des Flugs durch ein 2 kW Solarzellenpaneel auf den 20 m weiten Flügeln
und dem horizontalen Teil des Leitwerks nachgeladen wird.

(Grafik)
Das Leichtbau-Flugzeug aus Karbonfasern wird von dem französischen Unternehmen LISA Airplanes in der Nähe des Chambéry/Aix Flughafens entwickelt. LISA Airplanes ist ein Warenzeichen der LISA Aeronautics SAS. Gute Werbung erhält das Projekt durch seine Präsentation in der Ende 2007 veröffentlichten und von Leonardo di Caprio mitproduzierten Öko- Dokumentation ‚The 11. Hour’.
Im Juli 2008 beteiligt sich die Firma Trina Solar Ltd. an dem Projekt und sagt die Lieferung der benötigten Solarzellen zu. LISA Airplanes hat bereits verkleinerte Modelle hergestellt und plant, die Weltumrundung Ende 2009 zu beginnen, die in Etappen zu jeweils 1.500 km erfolgen soll.
Im Laufe der Jahre 2007 und 2008 wird das Konzept auf verschieden Messen und Ausstellungen präsentiert, woraus sich im September 2008 eine Kooperation mit der Schiffbauerfirma Danish Yacht aus Skagen ergibt.
Dabei geht es um ein zweisitziges, AKOYA genanntes 6,90 m langes Wasserflugzeug mit einer Spannweite von 10,90 m und faltbaren Flügeln, das dadurch auch an Bord einer Superyacht einfach verstaut werden kann. Unter dem Titel Projekt 116 wird diese 38 m lange Superyacht von Espen Oeino designt.

(Grafik)
Das erste 2-Sitzige Modell soll im Sommer 2010 flugfähig sein, allerdings noch mit konventionellen Antrieb. Die Nutzlast beträgt 240 kg, die maximale Startmasse 650 kg. Die Reisegeschwindigkeit wird mit 230 km/h angegeben, die Höchstgeschwindigkeit mit 250 km/h. Reservierungen werden bereits entgegengenommen. Akoya ist übrigens eine Perlmuschelart.
Im Februar 2009 sichert die Trina Solar die Lieferung von 1.100 Stück monokristallinen Solarzellen für die Montage auf den Tragflächen und dem Höhenleitwerk des Hy-Bird zu. Es scheint allerdings, als sei die Entwicklung später nicht weitergeführt worden, da sich LISA Airplanes nur noch mit dem Amphibien-Flugzeug AKOYA beschäftigt, mit dem man sogar im Schnee landen kann, und das ab 2011 auf diversen Luftfahrtmessen vorgeführt wird. Über den Flieger Hy-Bird ist dagegen nichts mehr zu hören.
Anderen Informationen zufolge startet der Prototyp der AKOYA im August 2007 in Chambery Savoie mit Gérald Ducoin am Steuer zu seinem Erstflug. Bis Mai 2009 fliegt die Maschine mit der Kennung F-WURE insgesamt 150 Stunden und erzielt 50 Bestellungen. Der Bau einer Vorserienmaschine beginnt 2010, und im März 2012 beantragt das Unternehmen die Musterzulassung in der amerikanischen Leichtflugzeug-Klasse und plant auch eine entsprechende europäische Zulassung.

Im Juli 2012 fliegt der Prototyp erstmals mit einen Passagier und wird beim AirVenture 2012 ausgestellt. Ebenfalls im Juli wird das Unternehmen allerdings unter Insolvenzverwaltung gestellt, nachdem die bestehenden Investoren keine zusätzlichen Mittel zugeschossen hatten. Als Resultat wird im Februar 2013 von der Heima Mining Company of China für 20 Mio. $e ine 75%-ige Kontrollbeteiligung an dem Unternehmen erworben, was die Fertigstellung des Produktionsentwurfs der AKOYA ermöglicht.
Ende 2014 wird der Preis für das Flugzeug auf 300.000 €, festgesetzt, und im Juli 2015 meldet die Firma bereits rund 100 Bestellungen. Im März 2017 wird bekanntgegeben, daß in Kürze ein aktualisierter, zweiter Prototyp fliegen wird, der ein neues einziehbares Fahrwerk enthält, mit dem das Flugzeug auf Wasser, Land und Schnee operieren kann. Dieser Prototyp, die Vorserie 1, weist überarbeitete, Seafoils genannte Rumpfflossen auf, die horizontal und nicht nach unten geneigt sind. Er fliegt erstmals im August 2017.
Die Maschine wird hier aufgeführt, obwohl sie von einem auf dem Seitenleitwerk montierten Rotax-912-Motor angetrieben wird, der Kerosin nutzt, weil später auch an einer 19-sitzigen hybrid-elektrischen Version namens B.koya gearbeitet wird.
Einem Bericht vom September 2019 zufolge wird das Hybrid-Elektroflugzeug, das im regionalen Charter- oder Fluglinienverkehr eingesetzt werden soll, von dem französischen Startup Multi Access Electric Air Mobility (MAEAM) angekündigt, einer von Benoit Senellart gegründeten Schwesterfirma der Lisa Airplanes. Es basiert auf der gleichen Technologie, die sich bei dem Zweisitzer bewährt hat, soll bis 2022 gebaut haben und bis 2024 auf den Markt gebracht werden.
Die B.koya mit einem maximalen Startgewicht von 4.000 kg wird ein Turbinen-/Elektroantriebssystem mit zwei am Heck angebrachten Propellern verwenden. Sie wird für eine Reisegeschwindigkeit von 232 km/h ausgelegt sein, mit einer Batterie-Reichweite von 300 km. Bei Verwendung der Turbine soll die Reichweite bis zu 3.000 km betragen. Das Flugzeug wird mit Tragflächen für Wasserlandungen und optional mit Skiern für Schneelandungen erhältlich sein.

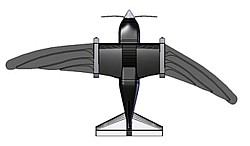
Gyrocopter
Im Juni 2008 präsentiert Jai
Reddy aus Plumstead, Cape Town, einen elektrischen, solarbetriebenen
Hubschrauber, den er nach drei Jahren Entwicklungsarbeit und diversen
Modellbauten international hat patentieren lassen.
Nun hofft er darauf, innerhalb von acht Monaten die Zulassung der Südafrikanischen Flugbehörde für seinen Super Sport Gyrocopter zu bekommen, um mit der Serienfertigung beginnen zu können. Leider ist es mir nicht gelungen, technische Details in Erfahrung zu bringen.
In Deutschland arbeiten Wissenschaftler am Institut
für Luft- und Raumfahrtssysteme der TU Braunschweig ebenfalls an MAVs,
darunter an dem Mikroflugzeug AutoMAV in der Gewichtsklasse
bis 300 g, sowie an einem autonom operierenden Flugroboter Carolo mit einer Spannweite von 40 cm und einem Gewicht von 350 g (s.o.).
Die maximale Flugzeit beträgt 45 Minuten, die Geschwindigkeit 70 km/h
und die Reichweite über 50 km.
Im Juli 2008 findet in Braunschweig mit der EMAV 2008 eine internationale Konferenz zu diesem Thema statt. Neben wissenschaftlichen Vorträgen findet dabei auch ein Wettbewerb für automatische Kleinstflugzeuge statt.

der TU Berlin
An der Technischen Universität Berlin wiederum werden ähnliche
Projekte seit 2006 am
Fachgebiet Bionik und Evolutionstechnik verfolgt, wo eine Rotorlibelle
entwickelt wird, die auf dem Handteller landen kann. Seitdem im Zuge
der Handytechnik Bauteile wie Lithium-Polymer-Akkus existieren, die
zwar winzig sind, aber dennoch ausreichend Energie liefern können,
ist es möglich sogenannte Mikro-Air-Vehikel zu konstruieren, die kaum
größer als ein Skarabäus sind.
Der Mikro-Hubschrauber ist als Koaxial-Rotor-Helikopter konstruiert, d.h. zwei Motoren treiben über zwei ineinander liegende Wellen zwei gegenläufig kreisende Rotorblatt-Duos an, die übereinander gestapelt sind.
Im Jahr 2008 ist die Flügelspannweite der Rotorlibelle bereits auf knapp 8,3 cm geschrumpft, langfristig soll der Mini-Flieger auch mit Kameratechnik oder Detektoren ausgestattet werden.
Der Designer Roland
Cernat aus Pforzheim, Absolvent der Universität Schwäbisch Gmünd,
gewinnt im Juli 2008 mit seinem futuristischen Flugzeugkonzept
den 1. Preis der Lucky Strike Junior Designer Competition.

(Grafik)
Sein energieeffizienter Gleiter Oriens ist elektrisch betrieben und vollständig aus recyclebaren Materialen gefertigt (Oriens = lat. Sonnenschein). Die organisch geformte Hülle des Motorsegelflugzeuges besteht aus transparentem Polycarbonat, die Flügel und das Leitwerk sind mit Photovoltaik-Zellen laminiert. Im englischsprachigen Raum wird das Konzept auch als Bubble Plane bekannt.
Nicht ganz schlau werde ich aus dem vorn angebrachten, zylindrischen E-Motor/Propeller. Es scheint jedoch, als könne der Propeller im Gleitflug eingeklappt werden, wenn der ultraleichte Flieger ohne jeden Treibstoffverbrauch vorankommt. Die sehr weiten Flügel besitzen bionische Schlaufen-Winglets, das Leitwerk ist V-förmig, und an Bord befindet sich ein Notaggregat, das den Weiterflug auch bei unzureichendem Sonnenschein gewährleistet.

Edgley EA-9 Optimist
Einem Bericht der Queen Mary University of London zufolge
haben Ingenieurstudenten im Rahmen ihres Master-Projekts in Zusammenarbeit
mit Anglia Sailplanes und AeroElvira Ltd. ein
Segelflugzeug so modifiziert, daß es mit elektrischer Energie fliegen
kann.
Die Modifikation besteht aus acht Unterflügel-Pylonen, die durch abnehmbare Riemen befestigt sind. Die Pylone sind mit 16 Propellern von 28 cm Durchmesser ausgestattet, je zwei pro Pylon, die von elektrischen Motoren und Lithium-Ionen-Batterien betrieben und durch eine drahtlose Verbindung durch den Piloten im Cockpit aktiviert werden. Die bürstenlosen Graupner 900 Motoren, die in diesem Experiment verwendet werden, kosten jeweils 60 $, so daß die gesamten Motorkosten nur 960 $ betragen.
Die ersten Flüge finden Mitte September 2008 statt, der Testpilot ist der legndäre Derek Piggott, der ein Edgley EA-9 Optimist Segelflugzeug bereits 1994 geflogen ist – damals natürlich unmotorisiert – und der zum Zeitpunkt der Testflüge 86 Jahre alt ist. Er stirbt 2019.
Ein weiterer elektrischer Hubschrauber stammt von Sean
Herbert, der diesen nach zwei Jahren Entwicklungsarbeit im Oktober 2008 der Öffentlichkeit vorstellt.

mit Koaxial-Propeller
Gemeinsam mit der in Sydney beheimateten Firma Wieland Helicopter Technologies hat Herbert eine ganze Produktreihe konzipiert, die 1-, 2-, 4- und 5-sitzige Versionen umfaßt, sowie eine kleine, unbemannte Ausführung. Der Hubschrauber, der sich insbesondere durch seine zwei gegenläufigen (Koaxial-)Propeller auszeichnet, die einen Heckpropeller überflüssig machen, sollen zu konkurrenzfähigen Preisen angeboten werden.
Im Moment beträgt die maximale Flugzeit des Elektro-Kopters nur 35 Minuten, was durch den Einsatz hochentwickelter Batterien jedoch verlängert werden soll. Das Unternehmen arbeitet außerdem an einer Wasserstoff-betriebenen Version ihres Hubschraubers, weil damit wesentlich größere Reichweiten möglich sind. Technische Details liegen noch nicht vor.

Studenten der University
of Michigan (das SolarBubbles-Team) setzen gemeinsam mit dem Brennstoffzellen-Hersteller
Adaptive Materials Inc. aus Ann Arbor Ende Oktober 2008 einen
neuen Langzeit-Flugrekord mit ihrem funkferngesteuerten und von einer
Brennstoffzelle angetriebenen Flugzeugmodell Endurance,
das eine Spannweite von gut 2,4 m aufweist.
Mit einer Flugzeit von 10 h 15 min. und 4 sek. übertreffen sie den bisherigen Rekordhalter, das Puma UAV von AeroVironment, das Anfang des Jahres ununterbrochen 9 h lang geflogen ist (s.o.). Als nächster Schritt wollen die Projektpartner versuchen, ihren Elektroflieger sogar für 20 h in die Luft zu bekommen.
Ebenfalls im Oktober 2008 wird in den
Blogs über eine fünfjährige Förderung mit insgesamt 10 Mio. $ berichtet, welche die University
of Michigan seitenes der US-Army erhält,
um autonome, fliegende Minispione zu entwickeln.

(Grafik)
Die COM-BAT genannten Roboter sollen 15 cm lang und von Sonne, Wind und Vibrationen angetrieben werden. Das Projekt umfaßt auch die Entwicklung winziger Stereo-Kameras, kleiner Gatter aus Richtmikrofonen, Detektoren für Radioaktivität und Giftgase – eben alles, was das Herz des militärisch-industriellen Komplexes begehrt.
Für die vorliegende Arbeit ist besonders Interessant, daß bei den COM-BAT Robots erstmals hocheffiziente Quantenpunkt-Solarzellen (Quantum Dot Cells) zum Einsatz kommen sollen. Das Projekt ist bei Erfolg um weitere 5 Jahre verlängerbar, wofür auch schon weitere 12,5 Mio. $ bereitstehen.
An einer ähnlichen Technologie mit dem Ziel der Konstruktion
eines autonomen Roboters arbeitet seit 2005 ein Forscherteam
um Matéj
Karásek an der niederländische Technischen Universität
Delft. Hier wird eine künstliche Libelle namens DelFly entwickelt,
deren durchsichtige Flügel aus einer feinen, hochfesten Spezialfolie
bestehen und von dünnen Kohlefaserstäben gehalten werden.
Die ferngesteuerte Libelle aus der Familie der Micro Aerial Vehicles (MAV) kann sogar eine Kamera an Bord haben, die mit einer Mustererkennungs-Software verknüpft ist, und dadurch den Insektenflug (z.B. um Hindernisse herum) nachahmen. Das 2008 erstmals präsentierte Modell DelFly Micro – das laut dem Guinness-Buch der Rekorde ‚kleinste kameratragende MAV der Welt‘ – wiegt nur 3 g und hat eine Spannweite von 10 cm. Angetrieben von einem winzigen Elektromotor schlagen die Flügel 14 mal in der Sekunde, wobei die Energie der 1 g leichten Lithium-Polymer-Batterie für eine 3-minütige Flugzeit reicht.
Ein autonom fliegendes Modell DelFly II wird im Juli 2010 auf der International Micro Air Vehicle Conference and Flight Competition vorgestellt. Der mit einer winzigen Videokamera ausgestattete und 16 g schwere Flieger erreicht mit seinen Flügelschlägen eine Geschwindigkeit von 15 m/s (54 km/h).
Hierfür hatte das Team eigens einen bürstenlosen Motor von 1,6 g Gewicht entwickeln müssen, der einen Wirkungsgrad von immerhin 60 % erreicht. Mit einer 130 mAh Akku-Ladung können ein 15 Minuten langer Horizontalflug oder ein 8-minütiger Schwebeflug durchgeführt werden. Dafür gibt es dann auch den 1. Preis des genannten Wettbewerbs.
Nun, im Dezember 2013, erscheint das Projekt wieder in der Fachpresse. Jetzt soll der Flugroboter allerdings die Bewegungen einer Fruchtfliege der Art Drosophila melanogaster nachahmen, die für ihre außerordentliche Wendigkeit bekannt ist. Dem Team zufolge kann die ebenfalls vollständig autonome Schlagflügel-Mikrodrohne, die 20 g wiegt, eine Spannweite von 11 cm hat und den neuen Namen DelFly Explorer trägt, Hindernissen selbständig ausweichen.

Dies wird durch ein 4 g wiegendes System aus zwei Kameras und einem Chip für binokulares Sehen erreicht, das es dem Winzling ermöglicht, den Abstand zu Gegenständen auf die gleiche Art abzuschätzen wie Menschen. Gleichzeitig kontrolliert ein Autopilot, der nur 1 g wiegt und ein Barometer, Beschleunigungssensoren und Gyroskope enthält, die Flughöhe und -lage. Somit ist es dem DelFly Explorer möglich, völlig autonom unbekannte Umgebungen zu erforschen.
Um den Flugroboter zu steuern, mußte das Design der Fruchtfliege allerdings um einige traditionellere, flugzeugähnliche Steuerflächen und einen Schwanz erweitert werden. Der Strom der Lithium-Polymer-Batterie reicht zu diesem Zeitpunkt für Flüge von etwa neun Minuten.
Fünf Jahre später, im September 2018, ist es dem Team gelungen, den Schwanz und die Steuerflächen loszuwerden und ein Modell zu bauen, das die bisher größte Ähnlichkeit mit einer echten Fruchtfliege hat. Der unglaublich wendige Flugroboter namens DelFly Nimble ist in der Lage, in sämtliche Richtungen zu flattern, mehrachsig in der Luft zu schweben und sogar Rückwärtssaltos zu machen. Dies ist möglich, weil der Flieger einen Giereffekt erzeugen kann, der mit der vorhandenen Nick- und Rollsteuerung übereinstimmt. Die ungewöhnliche Agilität erlaube auch Wendemanöver um 360°.

Der 29 g schwere DelFly Nimble besitzt auf jeder Seite 14 cm lange Doppelflügel aus transparenter Mylar-Folie, die in X-Form ein- und ausklappen und je nach Ausrichtung und Schlagmuster die Richtung und Geschwindigkeit bestimmen. Im Innern steckt ein knapp 3 g leichter Autopilot, der mit einem programmierbaren Mikrocomputer und einigen Sensoren wie etwa einem Höhenmesser ausgestattet ist. Zudem kann der Flieger eine kleine Nutzlast tragen, wie Sensoren oder Kameras.
Eine Batterieladung reicht aus, um das Gerät fünf Minuten in der Luft schweben zu lassen oder um einen Kilometer zurückzulegen, wobei die Flügel 17 mal pro Sekunde schlagen und damit eine Höchstgeschwindigkeit von 25 km/h erreicht werden kann. Mit einer Spannweite von immerhin 33 cm ist das Gerät allerdings 55 mal größer als eine Fruchtfliege.
Die ferngesteuerte Libelle aus der Familie der Micro Aerial Vehicles (MAV) kann sogar eine Kamera an Bord haben die mit einer Mustererkennungs-Software verknüpft ist, und dadurch den Insektenflug (um Hindernisse herum) nachahmen. Das 2008 präsentierte Modell DelFly Micro wiegt nur 3 g und hat eine Spannweite von 10 cm.
Ein autonom fliegendes Modell DelFly II wird im Juli 2010 auf der International Micro Air Vehicle Conference and Flight Competition vorgestellt, wo der mit einer winzigen Videokamera ausgestattete und 16 g schwere Flieger mit seinen Flügelschlägen eine Geschwindligkeit von 15 m/s erreicht (54 km/h).
Hierfür hatte das Team eigens einen bürstenlosen Motor von 1,6 g Gewicht entwickeln müssen, der einen Wirkungsgrad von immerhin 60 % erreicht. Mit einer 130 mAh Akku-Ladung kann ein 15 Minuten langer Horizontalflug oder ein 8-minütiger Schwebeflug durchgeführt werden. Dafür gibt es dann auch den 1. Preis des Wettbewerbs.
Ein weiteres Projekt der TU Delft, das seit 2007 gemeinsam
mit der Universität Wageningen durchgeführt wird, ist
die Entwicklung eines sich verwandelnden Flügels (Morphing Wing) namens
RoboSwift, der sich zurückfalten kann.
Inspiriert vom Mauersegler (Apus apus), einem der effizientesten Flieger der Natur, wiegt der Kunstvogel 80 g und hat eine Spannweite von 50 cm. Durch seinen Li-Poly-Akku soll er einer Gruppe von lebendigen Seglern bis zu 20 Minuten folgen können – oder mit seinen drei Mini-Kameras eine Bodenüberwachung von bis zu einer Stunde durchführen. Besonders clever: Bei Gleitflügen wird der Motor ausgeschaltet und der Propeller faltet sich zusammen, damit das Flugzeug noch leiser fliegen und Energie sparen kann.
Das Studententeam um David Lentink baut drei RoboSwifts, um mit diesen im März 2008 am ersten amerikanisch-asiatischen Micro Air Vehicle (MAV) Wettbewerb in Agra, Indien, teilzunehmen. Tatsächlich macht der Flieger Anfang März seinen ersten erfolgreichen Flug, und das Team reist anschließend nach Indien, wo sich allerdings erweist, daß es wohl noch ein oder zwei Jahre dauern wird, bis das Gerät voll funktionsfähig ist. Später hört man nichts mehr darüber – und auch über den Wettbewerb ist nichts mehr zu finden.
Weitere Umsetzungen des Jahres 2008 im Bereich der
fliegenden Miniaturroboter sind Quadrokopter – meist
tellergroße, selbststabilisierende Fluggeräte mit vier liegenden Rotorenen,
die von Elektromotoren angetrieben werden. Sie sind bereits im Spielzeughandel
zu kaufen. Es ist genau diese Modellausführung, die in den Folgejahren
immer weitere Verbreitung erfährt.
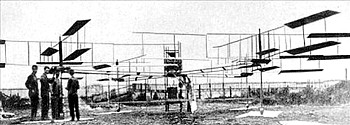
Die Quadrokopter-Struktur mit vier waagrecht rotierenden Propellern ist allerdings nicht neu, sondern hat eine ganze Reihe von Vorläufern, angefangen von den französischen Brüdern Jacques und Louis Charles Bréguet, die gemeinsam mit Prof. Charles Richet im Jahre 1907 einen Tragschrauber namens Gyroplane No. 1 bauen. Dieses und die folgenden Fluggeräte werden hier nur aus technisch-historischen Gründen aufgeführt - denn sie werden ja mit Brennstoff betrieben.
Die Bréguet-Maschine schafft es im August, kurzzeitig in einer Höhe von etwa 60 cm über dem Boden zu schweben, während Ende September bei einem Test etwa 1,50 m erreicht werden. Ähnliche Höhen lassen sich auch in mehreren nachfolgenden Versuchen erreichen.
Das Fluggerät ist jedoch weder steuerbar noch auf horizontaler Ebene lenkbar. Zudem muß das Ende eines jeden der vier Arme, welche die gewebeüberzogenen, jeweils 4-flügeligen Doppeldecker-Rotoren tragen, durch einen dort stationierten Mann gestützt werden.
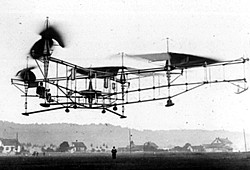
Der ebenfalls französische Ingenieur und Luftfahrtpionier Étienne Oehmichen beginnt 1920 mit seinen Experimenten an einem weiteren Vorläufer. Erstmals in die Luft erheben kann er sich im November 1922 in einem Drehflügler, den er Oehmichen No. 2 nennt.
Im April 1923 fliegt er den Senkrechtstarter über eine Distanz von 360 m zum Weltrekord – und kann im gleichen Jahr zudem eine 1 km lange Kreisstrecke in 7 Minuten und 40 Sekunden durchmessen. Oehmichens Fluggerät gilt als der erste zuverlässig fliegende, manntragende Quadrokopter und soll mehr als 1.000 Flüge absolviert haben.

Eine dritte Umsetzung geht auf den aus Bessarabian stammenden, russisch-amerikanischen Geschäftsmann und Hubschrauber-Pionier George de Bothezat zurück, der im Januar 1921 zusammen mit Ivan Jerome von dem U.S. Army Air Service den Auftrag erhält, einen Prototyp-Senkrechtstarter zu bauen.
Der als de Bothezat Helicopter (o. Jerome-de Bothezat Flying Octopus) bekannte Quadro-Hubschrauber besitzt eine X-förmige Struktur mit 8,1 m durchmessenden 6-Blatt-Rotoren an jedem Ende seiner jeweils 9 m langen Arme. Schon bei seinem Jungfernflug im Oktober (o. Dezember?) 1922 erweist er sich als überraschend erfolgreich für eine Maschine ohne vorangegangenen Prototypenbau, als er eine Höhe von 1,8 m erreicht und seine Lage mehr als anderthalb Minuten halten kann.
Der über 1,5 Tonnen schwere ,fliegende Oktopus’ geht bis Ende 1923 noch rund 100 mal in die Luft – einmal sogar mit drei oder vier ,Passagieren’, die sich an den Rahmen hängen –, fliegt aber nur langsam und in niedrigen Lagen bis höchstens 5 m Höhe, was weit entfernt von den Vertragsforderungen ist, die ein Schweben in 100 m verlangen. Zudem wird die horizontale Bewegung mehr durch den Wind bestimmt, als durch den Piloten.
Da sich das Interesse der Armee anschließend auf Autogyros richtet, wird das Projekt, das eine für die damaligen Verhältnisse sehr hohe Summe von etwa 200.000 $ gekostet hat, Im Jahr 1924 abgebrochen und das Flugzeug verschrottet. Anzumerken ist noch, daß die Muskelkraft-Hubschrauber der letzten Jahre einen ganz ähnlichen Aufbau aufweisen (s.d).
(Grafik)
Die futuristische Abbildung einer übergroßen Quadrokopter-Drohne, die
als mobiles
Krankenhaus agiert, erscheint im April 1960 in
dem Comicstrip ‚Closer Than We Think‘, der von dem Industriedesigner,
Werbegrafiker und Illustrator Arthur Radebaugh zwischen 1958 und 1963 für
das Chicago Tribune-New York News Syndicate produziert und in Hunderten
von US-Zeitungen veröffentlicht wird. Thematisch beschäftigen sich seine
technologischen Ausblicke mit allem Neuen, von High-Tech-Schulbänken
und Elektroautos bis hin zu Raumstationen, wetterfesten Kuppeln und Jetpack-Postboten.
Dementsprechend klingt auch die Beschreibung dessen, was sie sich Radebaugh für die Zukunft vorstellt: „Leichte, vorgefertigte Krankenhäuser werden an die Kriegsfronten oder in Katastrophengebiete geflogen. Tatsächlich plant die US-Armee bereits ein solches Projekt. Ein Transportmittel könnte ein nuklearbetriebener Hubschrauber sein - ein Goliath, der fast so lang wie ein Fußballfeld ist und eine halbe Million Pfund wiegt. Noch fortschrittlicher ist jedoch das Konzept einer riesigen fliegende Untertasse, die von massiven ‚Dyna-Props‘ hochgehalten wird. Solche Luftfahrzeuge würden nicht nur Krankenhäuser bewegen – sie könnten auch als fliegende Krankenhausschiffe dienen.“
Wer mehr über ‚Closer Than We Think‘ erfahren möchte, dem sei die Filmdokumentation über den futuristischen Vorstellungskünstlers Radebaugh und seine Arbeit empfohlen, die von dem Regisseur und Redakteur Brett Ryan Bonowicz produziert wurde und Ende 2017 in den USA erschien.
In den darauf folgenden Jahren machen aber die konventionellen Flugzeuge
das Rennen, und erst mit dem wieder auflebenden Interesse an VTOL-Versionen
(Vertical Take-Off and Landing) in den 1950ern fliegen
auch wieder neue Quadrokopter. Einer der ersten ist der Convertawings
A von 1956, der speziell für die U.S. Army
entwickelt wurde. Da diese Modelle – ebenso wie ihre Nachfolger in
den 1960er Jahren
– aber stets mit Brennstoffmotoren angetrieben wurden, sollen sie
hier nicht weiter behandelt werden.
Ebensowenig bringt es, die diversen verschiedenen Spielzeug-Quadrokopter aufzulisten, die ab dieser Zeit auf den Markt kommen. Doch gerade diese Flugkörper-Bauweise wird sich in den Folgejahren in einer riesigen Anzahl von Anwendungen niederschlagen, wie wir noch sehen werden, da ich die wichtigsten Entwicklungen dieser Technik dokumentieren werde – und hie und da auch eine der interessanteren Konsumenten-Produkte.
(Harvard)
Wesentlich kleiner dimensioniert als die vorangegangenen Flugkörper ist
eine mikro-elektromechanische Fliege mit einer Spannweite von knapp
25 mm und einem Gewicht von nur 60 Milligramm, die am Harvard
MicroRobotics Lab. von Robert Wood entwickelt
und von der DARPA finanziert wird.
Die Kunststoff-Flügel des erelktromechanischen Insekts schlagen 250 Mal in der Sekunde und werden von einem Mini-Motor angetrieben, der auf piezoelektrischer Keramik basiert. Legt man dieser eine elektrische Spannung an, dann zieht sie sich – ähnlich wie ein kontrahierender Muskel – zusammen.
Noch kleiner ist das Micromechanical Flying Insect der Universität Berkeley, ein Kunstinsekt von den Ausmaßen einer Schmeißfliege, das aus kaum mehr als einer dünnen Kohlefaserfolie besteht.
An der ETH Lausanne wiederum entwickelt Jean-Christophe
Zufferey ein 10 g leichtes Kohlefaserflugzeug, das sogar zwei Kameras
sowie Funksender, Gyroskop, Prozessor und Windmesser mit an Bord hat – und
damit das Wahrnehmungsvermögen einer Stubenfliege besitzt. In
den Vorstellungen der Entwickler inspizieren die künstlichen Fluginsekten
Kraftwerke oder Fabriken um festzustellen, ob an unzugänglichen
Stellen Gift austritt. Sie könnten auch nach einem Erdbeben ausschwärmen
und in zusammengestürzten Häusern durch winzige Lücken
schlüpfen,
um nach Überlebenden zu suchen. Primär jedoch zeigt sich
das Militär von den synthetischen Insekten fasziniert...
Forscher des Air Force Research Laboratory auf der Wright-Patterson
Airbase im US-Bundesstaat Ohio arbeiten daher ebenfalls an der Entwicklung
eines Spionage- und Kampfroboters, der so klein ist wie eine Stubenfliege.
Im Jahr 2015 soll ein autonom fliegender Kundschafter
in Vogelgröße fertig sein, im Jahr 2030 eine
Version in der Größe eines Insekts.
Bereits heute ist klar, daß auch diese Systeme alle elektrisch betrieben werden. Seit dem Vorjahr 2007 finanziert die Air Force Forscher an mehreren Universitäten, um den Flügelschlag von Fledermäusen und Insekten zu studieren und ihre biologischen Eigenschaften nachzuahmen.

Das Festo-Projekt des Jahres 2008 ist ein Indoor-Flugobjekt
mit peristaltischem Antrieb namens AirJelly, bei
dem acht Tentakel die Kraft des elektrischen Antriebs aufnehmen und
die schwebende, ferngesteuerte Qualle via Rückstoßprinzip sanft durch
die Luft vorantreiben.
Kernelement ist ein mit Helium gefüllter Ballon, ein zentraler elektrischer Antrieb und eine intelligente, adaptive Mechanik. Der aus zwei Lithium-Ionen-Polymer-Akkus versorgte Antrieb überträgt seine Kraft auf ein Kegelrad und anschließend nacheinander auf acht Stirnräder, die über Kurbeln die acht Tentakel der Qualle bewegen. Der Firma zufolge sei es das erste mal in der Luftfahrtgeschichte, daß der Antrieb eines Ballons durch eine peristaltische Bewegung erfolgt.
Die letzte Meldung des Jahres betrifft die oben
bereits beschriebene Methode, Flugobjekte mittels Hochleistungs-Laserstrahlen
vom Boden aus mit Energie zu versorgen. Diesmal schlagen Taysir
Nayfeh und sein Team an der Cleveland
State University vor, die Unterseite
von Flugzeugflügeln mit entsprechenden Solarzellen zu bestücken,
die für die Aufnahme der Lichtenergie von unten geeignet sind.
Anfänglich kann das System den Energieverbrauch an Bord senken und dadurch die Kosten und Emissionen senken, später – mit besseren Batterien und stärkeren Lasern - könne man sogar an eine Komplettversorgung denken. Ebenso ließe sich das System für Raumschiffe oder Satelliten im Orbit nutzen.
Die University of Florida Research Foundation Inc. in
Gainesville beantragt Ende 2008 das Patent für eine
völlig neue Art und Weise, Objekte fliegen zu lassen. Bei der Wingless
Hovering Of Micro Air Vehicle (WHOMAV) genannten Technologie
handelt es sich um eine Methode, ein flügelloses Gerät ohne rotierende
Komponenten mit elektromagnetischen und elektrohydrodynamischen Prinzipien
zu betreiben (US-Nr. 20100102174, veröffentlicht 2010).
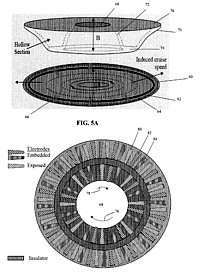
(Grafik)
Das am Florida Center for Advanced Aero Propulsion (FCAAP) der Universität entwickelte und vom Air Force Office of Scientific Research finanzierte Wingless Electromagnetic Air Vehicle (WEAV) war 2006 von dem Plasmaphysiker Prof. Subrata Roy erfunden worden. Es verwendet keine beweglichen Teile und kombiniert die Flugzeugstruktur, den Antrieb, die Energieerzeugung und -speicherung sowie die Steuerungssubsysteme zu einem integrierten System. Ein Bericht darüber unter dem Titel ‚Demonstration of a Wingless Electromagnetic Air Vehicle‘ ist im Netz zu finden.
Die elektromagnetische Kraft wird durch Anlegen einer gepulsten (Wechsel-/HF-)Spannung von einigen zehn Kilovolt zwischen einem Satz von geerdeten und mit Strom versorgten Elektroden erzeugt, die durch einen Polymer-Isolator, ein Dielektrikum oder ein anderes Material mit isolierenden Eigenschaften getrennt sind. Dabei weisen die Ausführungsformen der Erfindung einen Durchmesser von weniger als 15 cm auf, wobei sie eine Fluggeschwindigkeit von 7 – 10 m/s erreichen.
Der Patentanmeldung und den dort veröffentlichen Grafiken und (schlechten) Fotos zufolge scheint man bereits entsprechende Versuche gemacht zu haben, doch ob es zwischenzeitlich zu weiteren Umsetzungsschritten gekommen ist, konnte ich bislang nicht herausfinden. Ein früher Prototyp des WEAV einem Durchmesser von weniger als 15 cm, der effizient genug war, um mit Bordbatterien betrieben zu werden, soll in der Lage gewesen sein, etwa drei Minuten einige Millimeter über dem Boden zu schweben.
Da auch Prototypen mit unterschiedlichen Radien erfolgreich getestet werden, läßt dies auf eine Skalierbarkeit des Designs schließen. 2013 wird zudem ein im Jahr 2008 erneut beantragtes Patent erteilt (US-Nr. 8.382.029; vgl. auch Nr. 8.960.595, erteilt 2015).
In gewissen Punkten erinnert die Technologie an die elektrostatischen Maschinen, die im Kapitel Micro Energy Harvesting ausführlich beschrieben werden. Weitere Anwendungen im Bereich der elektrischen Fluggeräte finden sich in der Jahresübersicht 2018.
Weiter mit den Elektro- und Solarfluggeräten...