Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Vertikalachsen-Rotoren
Antriebs-Varianten (III)
Ebenfalls im Jahr 1997 entwickelt der US-Amerikaner Patrick
,Pat’ Peebles das Konzept eines FanWing-Flugzeugs,
und schon 1998 führt er an der Universität
von Rom erste Windkanalversuche an seiner Erfindung durch. Im Oktober 1999 gründet
Peebles in Chester, England, gemeinsam mit seiner britischen Gattin Dikla
Peebles, sowie mit Creighton
Murch, die Firma FanWing Ltd., um den Entwurf
kommerziell umzusetzen. Dieses Projekt ist eines der wenigen, die über
die Jahre hinweg auch durchgehend medial begleitet werden.
Das Antriebsprinzip des Flugzeugs basiert auf dem - seit dem späten neunzehnten Jahrhundert bekannten - Querstromgebläse und bildet eine Art Mischung aus Hubschrauber und Schaufelraddampfer, wobei sich auf den Flügeln Radialrotoren befinden, welche große Luftmassen unter die Flügel schaufeln, um für Auftrieb und Vortrieb zu sorgen. Damit soll sich das Flugzeug schon bei langsamen Geschwindigkeiten leise und energiesparend vom Boden abheben können.
Das erste, noch mit einem Verbrennungsmotor angetriebene Flugmodell vom September 1998 hat eine Flügelspannweite von 2 m und 4 kg Gewicht. Bereits im Dezember beginnen am Imperial College London unter der Leitung von Prof. J. M. R. Graham Windkanal-Tests mit einem Modell. Die Ergebnisse sind sogar besser als vorausgesagt. Das erste Patent wird im Februar 1999 beantragt (US-Nr. 6.231.004, erteilt 2001).

Im April 2000 reicht Peebles ein weiteres Patent für seine Auftrieb erzeugende aerodynamische Vorrichtung ein (US-Nr. 6.527.229, erteilt 2003), und im Dezember endet der bereits zweite Aktienverkauf – leider ohne Bezifferung des Resultats.
Im Jahr 2001 gewinnt Peebles den InterEx International Experimental Aircraft Award für das beste neue Antriebssystem. Allerdings zerlegt sich das Modell während einer Vorführung – aufgrund eines Pilotenfehlers. Bald darauf wird mit einem neuen Flügel-Design ein Durchbruch erzielt, denn nun kann das FanWing-Flugzeug alleine mit der Autorotation schnell genug gleiten, um eine kontrollierte Landung hinzulegen. Im Herbst beginnen Testflüge mit einem neuen, größeren FanWing-Modell (Spannweite 1,80 m, Gewicht 6 kg). Daneben wir auch das bislang kleinste Modell gebaut (70 cm Spannweite und 600 g Gewicht).
Klaus Koegler erlangt im Juli 2002 am Imperial College seine Dissertation über das FanWing-System, das er sowohl im Wasser als auch in Windkanälen testet. Seinem Fazit zufolge zeigt das System bei langsamen Geschwindigkeiten eine Wirkungsgrad-Verbesserung um 35 % gegenüber Hubschraubern. Zur gleichen Zeit werden zwei neue Modell in Betrieb genommen, mit 60 cm Spannweite und 800 g Gewicht, bzw. mit einer Spannweite von 100 cm und einem Gewicht von 2,2 kg.
Im August erhält das Unternehmen eine SMART-Förderung des britischen Ministeriums für Handel und Industrie, im Kooperation mit der EU, um die Machbarkeit zu belegen und mit der Entwicklung eines kommerziellen, unbemannten FanWing-Fluggeräts zu beginnen, das für den Einsatz als ferngesteuertes Überwachungssystem gedacht ist. Das über zwölf Monate laufende Projekt wird in Zusammenarbeit mit dem Imperial College, der Kingston University und der UAV-Firma Remote Aerospace Ltd. durchgeführt. Die im September durchgeführten Windkanaltests mit dem 1 m Modell zeigen einen Anstieg der Effizienz um fast 50 %, weshalb nun bei einer Motorleistung von 100 PS eine Hubkraft von 2 Tonnen vorhergesagt wird.

Im Juni 2003 gewinnen Peebles und sein Unternehmen den Edward De Bono ,Thinking’-Preis der Werbeagentur Saatchi & Saatchi International für weltverändernde Ideen; im September beginnen Testflüge des FanWing-UAV-Prototyps mit einer Spannweite von 2,2 m, die mit einer Nutzlast von 2 - 4 kg durchgeführt werden; und im November werden mit zusätzlichen Winglets erfolgreiche Flüge mit einer 8 kg Nutzlast durchgeführt. Das aktuelle Modell hat ein Gesamtgewicht von 17,5 kg. Außerdem gibt es in diesem Jahr eine zweite SMART-Förderung.
Ein Jahr später, im Juni 2004, erreicht das Abfluggewicht bereits 21 kg, und der FanWing wird von der New York Times unter die ,Ideen des Jahres’ gewählt. Im Jahr 2005 folgt ein JumpStart Connect Award der London Development Agency, um eine bemannte Version des Fliegers zu entwickeln.

2006 wird die Dissertation von Oliver Ahad, ebenfalls am Imperial College, in der sich dieser mit einem Computersimulation-Projekt des FanWing-Systems beschäftigt, mit dem National John Barnes Award der Association of Aerospace Universities ausgezeichnet. Im November erfolgen die ersten Flugtests des STOVL-Prototyps.
Im April/Mai 2007 werden Flugversuche mit einem ,Vectored Thrust STOVL R&D prototype’ durchgeführt, einer speziellen Version für niedrige Geschwindigkeiten, die als Drohne zur Stadtüberwachung gedacht ist. Der aus Verbundmaterialien hergestellte Prototyp mit einer Spannweite von 1,6 m, einer Fluggeschwindigkeit von 8 m/s und einem maximalen Startgewicht von 12 kg (bei einem Eigengewicht von 6 kg) wird von einem 1,2 kW Elektromotor angetrieben.

Schon im September/Oktober 2007 werden Flugtests mit einem weiteren neuen Modell absolviert, und im Juni 2008 erfolgt während des jährlichen, internationalen ParcAberporth Unmanned Systems Event in Wales die erste öffentliche Demonstration des unbemannten FanWing-Prototypen. Da die Rotoren allerdings noch immer nicht ihre optimale Leistung erreichen, muß sich Peebles immer wieder mit der Modifikation des Designs beschäftigen. Trotzdem meldet das Unternehmen im Dezember, daß es nun den Schritt von der reinen Forschungsarbeit zur Early-Stage-Vermarktung getan habe.
Zumindest graphisch mag das tatsächlich der Fall sein, wie eine Reihe von Entwürfen aus dieser Zeit zeigt, die aus der Feder (oder Maus) von Adrian Mann stammen. Hier abgebildet ist ein Cargo UAV mit einem Leergewicht von 300 kg und einem maximalen Abfluggewicht von 600 kg. Die Spannweite des Vogels beträgt 10 m, die der Rotoren 8 m, und die Fluggeschwindigkeit von 40 kn soll durch zwei 40 PS Motoren erreicht werden.

Aus dem Jahr 2009 werden keine Fortschritte gemeldet. Erst im Juli 2010 erscheint der Modell-Prototyp wieder auf der Farnborough Air Show. Dieses Modell wird später modifiziert und mit einem Doppelleitwerk ausgestattet, was zu besseren Stromungsverhältnissen am Heck und damit zu einem effizienteren, schnelleren und stabileren Flugverhalten führt, wie die im September durchgeführten Flugtests belegen, bei denen der FanWing Geschwindigkeiten von über 70 km/h erreicht.
Diese Weiterentwicklung basiert auf einer Zusammenarbeit zwischen Peebles und George Seyfang, dem ehemaligen leitenden Ingenieur für Flugzeugkonzeptentwicklung des britischen multinationalen Rüstungs- und Luftfahrtkonzerns BAE Systems. Die entsprechenden Windkanal-Tests starten im Oktober und werden bis Mitte des Folgejahres fortgeführt.

Im Juli 2012 wird das FanWing-Modell auf der Oshkosh Air Show in den USA vorgeführt, wo man schon ein Jahr später einen flugfähigen, zweisitzigen Technologie-Demonstrator der leichten Sportklasse zeigen will, der dann auch zum ersten Mal fliegen soll.
Die Firma ist aber noch immer auf der Suche nach Investoren, um den Demonstrator zu bauen und dann die notwendigen Zulassungen der FAA und der EAA zu erhalten, damit im Jahr 2013 bemannte Flüge durchgeführt werden können.

(Grafik)
Wie so oft, kann dieser Zeitplan nicht eingehalten werden, doch immerhin ist der Prototyp so vielversprechend, daß die EU im Rahmen des FP7-Projekts 600.000 € zur Verfügung stellt, damit Forscher um Prof. Matthias Nienhaus von der Universität des Saarlandes, zusammen mit dem Institut von Karman de Dynamique des Fluides in Brüssel sowie dem Deutschen Zentrum für Luft- und Raumfahrt (DLR), die Sensorsteuerung und den Elektroantrieb mit den optimalen Betriebsparametern für das neue Flugzeug entwickeln kann, das eines Tages 60 – 70 Personen und Lasten bis zu 8 t transportieren soll.
Im weiteren Verlauf des auf zwei Jahre angelegten europäischen Forschungsprojektes wird das optimierte Flügelmodell ab April 2014 in einem Windkanal in Brüssel getestet. Diese Tests an einem 1,5 m langen Flügelabschnitt werden durch EU-Mittel unterstützt, darunter 783.000 € vom DLR.

(Grafik)
Einem Bericht vom März 2014 zufolge erhält das Projekt weitere Unterstützung durch Wissenschaftler in Saarbrücken, Brüssel und Hamburg, die die die Antriebstechnik soweit optimieren wollen, daß der Flieger tatsächlich Passagiere und Güter transportiert kann. Eine der zentralen Fragen ist, ob die Neigung der Rotorblätter starr oder elektrisch verstellbar sein soll, da letzteres sehr viel teurer ist. Die optimale Neigung soll von April an 4 – 6 Monate lang in Brüssel im Windkanal getestet werden.
Im Zuge der weiteren Entwicklungen koordiniert die DLR-Einrichtung Lufttransportsysteme in Hamburg das FanWing-Projekt im Rahmen des von Oktober 2013 bis September 2015 laufenden EU-Projekts SOAR und ist für den Gesamtentwurf eines Flugzeugs mit dem innovativen Antriebskonzept verantwortlich; darüber hinaus wird eine Marktanalyse durchgeführt und der Entwurf mit Konkurrenzprodukten verglichen. Danach soll die Details für eine Transport- und eine Passagiermaschine ausgearbeitet werden.
Bislang zum letzten mal hört man von dem FanWing-Flieger, als das Projekt im Juni 2015 auf der Paris Air Show vorgestellt wird. Bis dahin sind nur unbemannte Entwicklungsprototypen geflogen.
Die Flugzeugbau-Firma Bosch
Aerospace Inc. in Huntsville, Alabama, die in den 1990er Jahren
unbemannte Luftschiffe für die militärische Überwachung und als Sender
für Fernsehveranstalter herstellt, arbeitet etwa Mitte der Dekade zudem
an dem Projekt eines Zycloidalantriebs für VTOL-UAV-Anwendungen,
dessen Schlußbericht im Oktober 1998 erscheint, kurz
nach Durchführung der entsprechenden Testläufe.

der Bosch Aerospace
Auf dem Titel erscheint die Zeichnung eines Navy-Militärflugzeugs, von dem es auch ein kleines Modell gibt, dessen Abbildung weiter unten zu sehen ist.
Aus dem Bericht geht hervor, daß Bosch Aerospace gemeinsam mit dem Unterauftragnehmer MSU Raspet Flight Research Laboratory (Teil des Bagley College of Engineering an der Mississippi State University), und im Rahmen einer Förderung durch das Small Business Innovation Research (SBIR) Programm, einen Prototyp mit einem Radius von 120 cm entwickelt und getestet hat, wobei sehr gute Ergebnisse erzielt werden. Der 60-seitige Report ist im Netz zu finden.
Zwischen den Jahren 2000 und 2007 schließt Bosch Aerospace mit dem Department of Defense 6 Verträge mit einem Gesamtumfang von 2,55 Mio. $, bei denen es u.a. um einen kleinen Blimp geht, der unter dem Namen Rapidly Elevated Aerostat Platform (REAP) von der US-Army in Form von zwei Systemen im Dezember 2003 im Irak zum Einsatz gebracht wird. Forschungsgelder für den neuen Antrieb scheint es aber nicht zu geben.

Im Dezember 2001 erlangt ein Michael Lynn McNabb mit einer Arbeit über die Entwicklung eines Computermodells von einem Zycloidal-Antrieb sowie dessen Vergleich mit den Experimentalresultaten der Windkanaltests von Wheatley (s.o.) seinen Master of Science an der Mississippi State University, doch schon im Jahr 2002 wird die Bosch Aerospace von den bereits mehrfach genannten Information Systems Laboratories Inc. (ISL) in San Diego, Kalifornien, übernommen, um weiterhin als ISL-Abteilung unter dem Label Aeronautical Systems Operations zu arbeiten, woraus später Aeronautical & Space Systems wird.
Mit der Übernahme scheint auch das Kapitel Zycloidalantrieb seinen Abschluß gefunden zu haben.
Ende 2001 berichtet die Presse über eine Art Weiterentwicklung
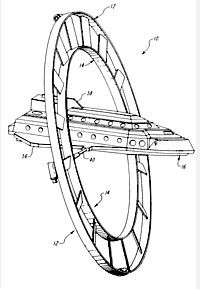
des Kaletsch-Rotorflüglers (s.o.) durch den Persisch-stämmigen US-Unternehmer Rouzbeh
Yassini-Fard, dessen im August 2000 gegründete
Firma AeroCopter Inc. nun das Konzept eines revolutionären
Kipprotorflugzeugs namens Humming vorstellt. Finanziell unterstützt wird
das neue Unternehmen in Andover (später in Boston), Massachusetts, von
der ebenfalls Yassini-Fard gehörenden YAS Ventures LLC. Als Mitgründer
tritt Rouzbehs älterer Bruder Siamak Yassini-Fard auf,
ein Veteran der Space-Shuttle- und Raumstation-Programme der NASA.

Die Leistung dieses Fluggeräts, das wie ein UFO aussieht, solange es am Boden steht, soll sowohl die von Jet-Flugzeugen, als auch die von Hubschraubern übertreffen, da hier die besten Eigenschaften beider Technologien in einem Fahrzeug integriert sind. Das Resultat hat eine deutlich erhöhte Funktionalität, Skalierbarkeit (20 – 120 Passagiere), Stabilität und Sicherheit.
Der Flugzeugrumpf ist von einem großen, gegenläufigen Einzelschwenkrotor von 8,2 m Durchmesser umgeben (Mono-Tilt-Rotor, MTR), an dem vier Düsentriebwerke angebracht sind. Beim Start treiben diese den Schwenkrotor-Außenring mit seinen acht kurzen Blättern an, der sich daraufhin mit bis zu 120 U/m um den inneren, feststehenden Ring dreht. Die Lagerung des äußeres Rings soll dabei elektromagnetisch und reibungsfrei erfolgen. Während des senkrechten Starts liegt der Rotor parallel zum Rumpf. Sobald eine Höhe von rund 300 m erreicht ist, schwenkt er in die Vertikale, um im Winkel von 87° zum Rumpf für den Vorwärtsflug zu sorgen. Erwartet wird eine Fluggeschwindigkeit von 640 km/h.
Zu diesem Zeitpunkt existiert der Rotorflügler allerdings nur als Computersimulation, weshalb im nächsten Schritt ein Modell des neuartigen Senkrechtstarters mit 3 m Durchmesser gebaut und anschließend auf seine Flugtauglichkeit getestet werden soll.
Im Jahr 2002 wird das Patent erteilt (US-Nr. 6.402.088, angemeldet 2001), in welchem als gemeinsame Erfinder George J. Syrovy, Siamak und Rouzbeh Yassini-fard genannt werden. Eine vorläufige Konzeptions- und Strukturanalyse der Konfiguration-1 mit innerem und äußerem Ring durch Susan Faraji an der University of Massachusetts Lowell und Jerome Connor am MIT führt zu einer Größenänderung und einem neuen Konfigurationsdesign.
2003 wird als Machbarkeitsstudie und zur Durchführung von Strukturanalysen der Bau eines ersten ferngesteuerten Prototyp-Modells mit 2,1 m Durchmesser abgeschlossen, bei dem mehrere kleine Stabilisierungspropeller in den Rumpf eingelassenen sind.

Basierend auf dem Prototypenbau und den Leistungsstudien an diesem Modell wird 2004 eine Konfiguration-3 geschaffen, um weitere innovative Technologien zu integrieren. Als Teil einer neuen Marktstrategie will sich das Unternehmen nun auch dem Bereich der unbemannten Fluggeräte zuwenden, wobei man insbesondere den Militärsektor im Auge hat.
Bis das AeroCopter-Team den Bau eines 2. Prototyp-Modells mit Schwenk-Rotor abschließt, dauert es allerdings bis 2006.
Diese Version der Konfiguration-2 hat einen Durchmesser von 350 cm, und verwendet 4 Impeller-Motoren, sowie ebenfalls 8 Blätter, die diesmal etwas größer ausfallen. Außerdem wird auf den äußeren Haltering der Blätter verzichtet. Leider gibt es nur sehr kleine Fotos der Modelle, auf denen die Details kaum erkennbar sind.

Nach der Durchführung umfassender Struktur-, Flugsteuerungs- und Aerodynamik-Tests zur Bewertung der Systeme und Komponenten, wird auch die Konstruktion des Schwenk-Rotors mit Permanentmagneten und mechanischen Baugruppen erfolgreich getestet. Daraus resultiert eine neue Konfiguration-4 mit gegenläufigen, verdrillten Rotorblättern und einer einheitlichen Antriebstechnik.

Nach den mehrjährigen Forschungsstudien und der Prototypen-Modellierung werden 2007 in Kooperation mit der Firma Empirical Systems Aerospace LLC und Prof. David W. Hall von der California Polytechnic State University in San Luis Obispo, Kalifornien, die endgültigen Konfigurationskonzepte für ein PAV/VLJ-Flugzeug namens Sarus, und für ein UAV Kestrel als Frontlinien-Liefersystem (Front Line Delivery System, FLDS) für zivile und militärische Zwecke festgelegt.
Im Jahr 2008 kann auch das Design des reibungsfreien elektromagnetischen Rotationssystems abgeschlossen werden, das auch als Ersatz für die Taumelscheibe bei Hubschraubern eingesetzt werden kann. Im Dezember tritt AeroCopter in die zweite Phase ein, bei der es um die Suche nach zusätzlichen Mitteln geht, um die Entwicklung eines Prototyps in voller Größe zu ermöglichen. Bislang hat das Unternehmen schon mehrere Millionen Dollar in das Projekt gesteckt.
Eine entsprechende Grafik dieses geplanten Flugkörpers stammt von Nick Kaloterakis aus Sydney.
Das US-Magazin Popular Science ehrt die Entwicklung mit der Titelseite seiner Ausgabe vom Mai 2009, wobei von einem 1.320 kg schweren zweisitzigen Luftfahrzeug mit einer Reisegeschwindigkeit von mindestens 405 km/h, und einer Reichweite von 555 km (300 nm) gesprochen wird. Danach ist über das Projekt aber leider nichts mehr zu hören.
Ebenfalls 2001 fliegt zum ersten Mal der von Roy P. Gibbens aus Meridian, Mississippi, entwickelte Zykloidalpropeller, der Anfangs an einem Helium-Ballon hängt, und später erfolgreiche Testflüge als Antrieb und Steuersystem eines 7,8 m langen Blimps absolviert.
An dem Cy Prop genannte Antrieb mit 6-Blatt Rotoren scheint Gibbens schon seit den 1990er Jahren zu arbeiten, zumindest hält er auf der 9. Lighter-Than-Air Systems Technology Conference in San Diego im April 1991 einen entsprechenden Vortrag.
Leider ist über ihn und seine Firma für Ingenieurdienstleistungen Gibbens and Associates sonst nichts zu finden.
In den Folgejahren gibt es diverse weitere neue Patentanmeldungen für
Zycloidal-Fluggeräte.
Glenn Martin Tierney aus Huntsville, Alabama, als Erfinder, und die Firma Information Systems Laboratories Inc. aus San Diego, Kalifornien reichen 2003 das Patent für ein VTOL-UAV ein (US-Nr. 6.932.296, erteilt 2005); Reginald John Atherton aus dem britischen Swansea für ein senkrecht startendes Drehflügelflugzeug (GB-Nr. 2403460, erteilt 2005); Callum R. Sullivan aus New Market, Alabama, und ein weiteres Mal die Information Systems Laboratories Inc. für ein Tri-zykloidisches Luftschiff (US-Nr. 7.264.202, beantragt 2005, erteilt 2007); Karl F. Milde Jr. aus Mahopac, New York, für ein persönliches VTOL-Flugzeug (US-Nr. 7.461.811, beantragt 2005, erteilt 2008; vgl. US-Nr. 6.886.776); sowie Meinhard Schwaiger für einen klassischen Cyclogyro mit Längsrotoren, dessen besonders Design-Merkmal darin besteht, daß die zyklische Steuerung nicht nur beim Anstellwinkel, sondern auch bei der Blattkrümmung selbst ansetzt (US-Nr. 7.735.773, beantragt 2005, erteilt 2010; vgl. österreichische Patentanmeldungen A 1895/2002 und A 673/2003 von 2002 bzw. 2003).
Inzwischen wird auch überall auf der Welt in Universitäten an kleinen,
unbemannten Luftfahrzeug-Designs gearbeitet, bei denen die Schwebefähigkeit
besonders nützlich ist. Aus einigen dieser Entwürfe entstehen auch
fliegende Prototypen.
Die erwähnten Video-Clips lassen sich mit einer einfachen Suche schnell finden, das Stichwort Cyclocopter neben den Namen der jeweiligen Universität sollte ausreichen (ich verlinke sie hier bewußt nicht, da sich die Adressen erfahrungsgemäß immer wieder ändern).
Die Entwicklungen an der Seoul National University in
Südkorea beginnen im Jahr 2000 mit elementaren Studien
und Untersuchungen an einem 2-Rotor-System mit einem 4-Blatt-Rotor-Radius
von 17,5 cm und 55 cm langen Blättern. Die Universität hält zwei koreanische
Patente an dem senkrecht startenden und landenden Flugzeug (Nr. 0558462
und 0558463).

Die konstruktive Lösung des koreanischen Teams um Prof. S. J. Kim erreicht den stabilen und kontrollierbaren Flug durch zwei Paare von sich gegenläufig drehender Rotoren, die parallel zueinander ausgerichtet sind und mit der gleichen Drehzahl rotieren. Für die höheren Fahrgeschwindigkeiten eignet sich dieser Ansatz allerdings nicht.
Von 2002 bis 2003 wird mit verschiedenen Blattkonfigurationen (2, 3, 6) experimentiert, wobei 80 cm lange Blätter eingesetzt werden.
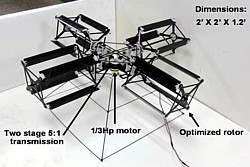
Bis Ende 2004 folgt ein relativ großes UAV-Modell mit zwei 4-Blatt-Rotoren. Der Rotor-Radius beträgt 70 cm, die Blattlänge 100 cm, und angetrieben bis auf 550 U/m wird das Ganze durch einen 15 PS Motor.
Im Jahr 2005 wird an einee weiterentwickelten Ausführung mit 2 x 2 Rotoren gearbeitet. Der Rotor-Radius beträgt 85 cm, die Blattlänge unverändert 100 cm, und für die 450 U/m wird ein 32 PS Motor eingesetzt.

Gleichzeitig wird der erste Mini-Cyclocopter Skywalker 1 konstruiert, ebenfalls mit 4-Blatt-Rotoren, mit 20 cm Radius und 40 cm langen Blättern, die 1.500 U/m erreichen. Damit kann das System sein eigenes Gewicht aufheben. Die 2. Version absolviert 2006 ihre ersten Flugtests, noch im Fesselung, doch im Jahr 2007 wird ein schon wesentlich weiter entwickelter Skywalker 3 erprobt, der wiederum mit 4 Rotoren ausgestattet ist, und auch neugestaltete Blätter hat (Radius 25 cm, Blattlänge 50 cm). Die Versuche mit leichten Variationen dieses Modells laufen bis 2009, und Videos mit Freiflug-Tests in der Halle gibt es von 2012 und 2013.
Daneben werden Tests mit einer zykloidischen Windkraftanlage durchgeführt, die im Grunde aus einem vertikal aufgestellten Cyclocopter-Rotor besteht (Koreanisches Patent Nr. 0490683 von 2005), sowie Überlegungen und Designs zum Einsatz des Zykloidal-Blatt-Systems zur Steuerung von Luftschiffen angestellt. Außerdem wird 2012 der Bau eines 90 kg schweren UAV mit zwei Hauptrotoren bekanntgegeben (noch nicht verifiziert).

in Singapur
Im Februar 2007 stellen Hu Yu und Lim Kah Bin vom Department
of Mechanical Engineering der National University of Singapore ein
funktionierendes Modell vor, das 358 g wiegt und zwei bürstenlose Elektromotoren
hat, die von einer 12 V/720 mAh Li-Po-Batterie versorgt werden.
Ihr funktionierendes Modell besteht aus einem modifizierten, ferngelenkten Hubschrauber, dessen Tragschraube durch zwei seitlich angebrachte, zykloidische Rotoren mit jeweils drei Blättern ersetzt worden ist. Allerdings fliegt das Modell nur im Fesselflug.
An der University of Maryland, College Park, baut ab 2008 ein
Team um Moble Benedict und Prof. Inderjit Chopra einen Mikro-Cyclocopter.
Es wird behauptet, daß die dabei durchgeführte Cyclocopter-Forschung
die umfassendste theoretisch-praktische Studie beinhaltet, die seit dem
Aufkommen dieses Konzepts im frühen 20. Jahrhundert jemals erarbeitet
wurde.
Im Jahr 2009 entwickelt man einem Cyclocopter mit kreuzförmig angeordnetem Vierfach-Rotor.
2010 legt Moble Benedict seine Dissertation unter dem Titel ,Grundlegendes Verständnis des Cycloidal-Rotor-Konzeps für Anwendungen bei Mikro-Luftfahrzeugen’ vor – überraschenderweise in teilweiser Erfüllung der Anforderungen für den Grad eines Doktors der Philosophie.
Erfolgreiche Tests mit einer 2-Rotor-Konfiguration werden im April 2011 gemeldet.
Später werden die Videos mit dem relativ stabilen, autonomen Flug von zwei Modellen mit 4-Blatt-Rotoren, Twincyclo-Carbon und Twincyclo-Foam, die 235 g bzw. 210 g wiegen, auf YouTube gezeigt. Die Namen beziehen sich auf das gewählte Material für die Blätter der Rotoren, die durch unabhängige Motoren angetrieben werden. Die Verwendung einzelner Motoren macht das Design allerdings schwerer, komplizierter und teurer. Die Stabilisierung erfolgt durch kleine Heckpropeller.
Ein Team an der Northwestern Polytechnical University in
China baut 2011, nach vierjähriger Entwicklungszeit,
ein freie fliegendes Cyclocopter-Modell namens Fire wheel.
Das 1,3 kg schwere Design verwendet zwei zykloidische Rotoren für die effiziente Erzeugung des Auftriebs, sowie kleine und laute herkömmlichen Kopf- und Heckrotoren zur Stabilisierung des Fluggeräts. Diese dienen auch dazu, Kontrolle über die horizontale Position und Flugrichtung zu bieten.
Die Videos von Testflügen des Teams, bei denen der Cyclocopter eine beeindruckende Stabilität und gute Steuerbarkeit zeigt, landen ebenfalls auf YouTube.
Auf der Pariser Luftfahrtausstellung im Juni 2011 präsentiert
die österreichische Innovative Aeronautical Technology GmbH (IAT 21),
ein in Linz (später in Traun) beheimatetes privates Forschungsunternehmen
im Bereich innovativer aerodynamischer Technologien, ein von Dipl.-Ing.
Meinhard Schwaiger erfundenes neues Antriebssystem, an dem die Firma
bereits seit drei Jahren arbeitet.

Neben dem Antriebsaggregat selbst werden in dieser Zeit außerdem ein nahezu reibungsfreies Schwenklager, sowie eine neuartige Fluggerätekonfiguration entwickelt, getestet und international patentiert.
Der innovative Antrieb, der zur Grundlage ferngesteuerter D-Dalus Drohnen, sowie auch bemannter Fluggeräte, werden soll, besteht aus 4 horizontalen Sets von Cyclogyro-Rotoren, die paarweise angeordnet sind und gegenläufig mit 2.200 U/m rotieren.
Die Scheiben der Rotoren sind durch Flügel verbunden, deren Anstellwinkel durch die Verschiebung der Scheiben-Achse verändert werden kann, wodurch bei jedem Flügel ein unterschiedlicher Anstellwinkel einstellbar ist.

Die resultierende Schubkraft kann daher in jede benötigte Richtung gelenkt werden, und ermöglicht der Drohne theoretisch 360°-Drehungen um alle drei Achsen. Der nun vorgestellte Prototyp kann 3 m über dem Boden schweben und sich bis zu 20° um die horizontale und vertikale Achse drehen. Seine Tragekraft beträgt gut 60 kg.
Die Technologie ist bestechend, denn wenn die Triebwerke im Sekundenbruchteil umschalten, wird sogar ein Ansaugen an die Landefläche möglich. Dadurch kann der D-Dalus auch auf bewegten Objekten oder schrägen Flächen landen.
Als unbemannte Drohne hat der D-Dalus bereits real abgehoben, die bemannte Version ist ein Konzept mit 4 Sitzen bei Abmessungen von ca. 8 x 8 m bei etwas über 2 m Höhe.

Im nächsten Schritt soll gemeinsam mit der Cranfield University ein größerer Motor, als der gegenwärtig genutzte 120 PS Motorrad-Motor, zum Einsatz kommen, um mit einer größeren Version des Fluggeräts weiter, schneller und in alle Richtungen fliegen zu können.
Der Entwurf des abgebildeten Konzepts stammt von dem Designer Julian Prüll des ebenfalls in Linz beheimateten Designbüros formquadrat gmbh.
Ebenfalls auf Basis des patentierten Konzepts stellt die IAT21 innovative W-Dalus Wind- und Wasserturbinen vor, über die inzwischen aber nichts mehr zu finden ist.
Im Juli 2012 wird der D-Dalus auf der Farnborough Airshow in England, und im Juni 2013 auf der Paris Air Show präsentiert – doch mehr scheint bislang nicht geschehen zu sein.
Eine weitere Version namens Whisper Drone stammt
von dem Elektroingenieur Derek Schwartz und wird ausführlich
unter den technologischen Entwicklungen des Jahres 2018 vorgestellt (s.d.).
Weiter mit dem Hammurabi-Rotor...