Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
1997 - 2005
Am 20. August 1997 gibt es auf dem Flugplatz Aachen-Merzbrück
eine Weltpremiere: Stefan Gehrmann startet mit seinem Elektro-Klapptriebwerks-Motorsegler Air
Energy AE-1 Silent zum Erstflug, nachdem der Segler bereits im
Frühjahr auf der Aero in Friedrichshafen vorgestellt worden war.
Die ‚Silent’ ist
ein italienisches Leicht-Segelflugzeug mit 12 m Spannweite in GFK/CFK Vollkunststoffkonstruktion,
von dem bisher etwa zehn Exemplare hergestellt wurden.

Ab 1998 gilt die Silent AE-1 als das weltweit erste serienfertige Segelflugzeug mit Elektroantrieb, das eine Musterzulassung besitzt.
Es ist von der 1992 gegründeten Firma Air Energy in Aachen umgerüstet worden, die unter anderem auch Helium- und Luftventile, Ballonet-Gebläse und Überstromventilatoren für Luftschiffe anbietet. Außerdem verkauft das entwicklungsorientierte Unternehmen exklusiv den Scoot’elec Elektroroller von Peugeot.
Die Silent AE-1 besitzt ein neu entwickeltes Klapptriebwerk mit einem wartungsfreien 16 kW Motor und einem Faltpropeller mit 1,92 m Durchmesser, der nach dem Start vollständig im Rumpf verschwindet. Eine Ladung des 35 kg wiegenden NiCd-Akkus reicht für 3 Starts auf ca. 600 m Höhe. Mit einem Schnelladegerät dauert eine vollständige Ladung nur 90 min. Selbst auf Graspisten reicht der AE-1 eine Startstrecke unter 200 m.
Der lautlose Steigflug bringt den Segler in knapp 5 min. auf die maximale Höhe von 600 m, das entspricht einer Steigleistung von 2,2 m/s und verbraucht dabei nur knapp ein Drittel der Batteriekapazität. Das Leergewicht der AE1 liegt bei 190 kg, das maximale Startgewicht bei 300 kg, die Minimalgeschwindigkeit liegt unter 65 km/h. Als Preis werden rund 50.000 € angegeben.
Im Februar 1999 wird die Silent AE-1 mit dem renommierten Berblinger Preis der Stadt Ulm für Innovation auf dem Gebiet der Allgemeinen Luftfahrt ausgezeichnet. Es ist geplant bis Ende 2000 vier weitere Elektrosegler zu bauen. Komplett ausgerüstet soll die ‚Nullserie’ zum Sonderpreis von jeweils 79.000 DM plus Steuern angeboten werden.
Das Unternehmen, das 2003 in die Lithium-Ionen-Technologie einsteigt, wird 2006 Partner des Solarflugzeugprojekts Solar Impulse, an welches 2008 die ersten Antriebsbatterien ausgeliefert werden (s.u.).
Zu den Kleinst-Elektrofliegern
gehören auch die mikromechanischen Fluginsekten (micromechanical
flying insect MFI), die ab Mitte 1998 am
MIT entwickelt werden. Ziel ist es, ein selbständig fliegendes Objekt
mit den Maßen von 25 mm (Flügelspitze bis Flügelspitze) zu schaffen.
Tatsächlich gelingt es im Laufe der Folgejahre den Flügelschlag von Fliegen nachzuahmen und einen piezoelektrischen Muskel zu entwickeln, der dem natürlichen energetisch sogar überlegen ist. Im März 2003 wird eine entsprechende, mikroskopisch kleine Kohlefaser-Struktur vorgestellt, an deren Seiten die Flügel mit 150 Hz schwingen.

Ebenfalls ab 1998 arbeitet AeroVironment an einem Nachfolgemodell seiner BlackWidow Minidrohne.
Die Flügelspannweite des neuen MAV Wasp beträgt
33 cm, das Gesamtgewicht 170 g.
Im August gelingt bereits ein Flug mit einer kontinuierlichen Flugdauer von 1 h 47 min. Die Energie von durchschnittlich 9 W wird von einer Lithium-Ionen Batterie geliefert.
Am MEMS Laboratory des California Institute
of Technology (CalTech) wird zwischen 1998 und 2001 die
Entwicklung der Ornithopter MAV MicroBat Reihe vorangetrieben,
finanziert durch die DARPA.
Während das erste Modell von Supercaps angetrieben nur 9 Sekunden lang herumflattern konnte, erreicht das Folgemodell im Jahr 1999 mittels einer Nickel-Cadmium-Batterie schon eine verdoppelte Flugzeit von 18 Sekunden.
Der letzte Prototyp vom November 2001 ist mit einer Li-Io-Polymer-Batterie ausgestattet, kann per Funk ferngesteuert werden und bleibt schon bis zu 6 min. 17 sec. in der Luft.
Ein weiterer Ornithopter ist das MAV
Mentor,
das von SRI International und der Universität
von Toronto entwickelt
wird. Grundlage dafür sind das Flugverhalten und die Motorik des Kolibri.

Am Belgischen Institute for Technological Research (Vito) beginnt 2000 das
Pegasus-Projekt (Policy support for European Governments by Acquisition
of information from Satellite and UAV-borne Sensors), unter dem
ein solarbetriebenes Flugzeug für langandauernden Betrieb in großen
Höhen entwickelt wird, wo die Temperatur bis 50°C unter
Null sinken kann.
Für den QinetiQ Mercator mit seinen 16 m Spannweite und 27 kg Gewicht will man papierdünne Solarzellen und Lithium-Akkumulatoren einsetzen, damit das Flugzeug auch eine Nutzlast von 2 kg aufnehmen kann. Versuche mit einem 40 % großen Modell verlaufen erfolgreich.
Der Name bezieht sich vermutlich auf den britischen Rüstungskonzern Qinetiq, der zuvor Teil der Defence Evaluation and Research Agency (DERA) war, und der uns im Folgenden noch häufiger begegnen wird. In welchem Umfang er an dem Pegasus-Projekt beteiligt ist, habe ich noch nicht herausfinden können.

Im Jahr 2001 wird die Kooperation von NASA,
UQM, FASTec (Foundation for Advanced Science and Technology Education
Curriculum) und dem PEMFC-Brennstoffzellen-Hersteller Lynntech bekannt
gegeben, bei der es um die Entwicklung eines 2-sitzigen Elektroflugzeugs
auf Basis der ‚DynAero Lafayette III’ geht.
Das E-Plane soll wahlweise mit Lithium-Ionen-Batterien (Reichweite 160 km) oder wasserstoffbetriebenen 10 - 15 kW Brennstoffzellen (Reichweite 400 km, später auf 800 km erweiterbar) bestückt werden, wobei die Lithium-Ionen-Batterien im letzteren Fall als Reserveenergie zum Einsatz kommen. Angetrieben wird die Maschine durch einen 53 kW Elektromotor der UQM Corp.

Im Juni 2002 findet
an der Brigham Young University (BYU) in Provo, US-Bundesstaat Utah,
einer konfessionellen Universität im Besitz der Kirche Jesu Christi
der Heiligen der Letzten Tage, der bereits 6. internationale
Wettbewerb für ferngesteuerte Kleinstflieger (Micro Air Vehicles Competition MAV)
statt.
Es nehmen Teams von US-Universitäten, sowie aus Deutschland, Frankreich und Korea teil, Sponsor des Ganzen ist die NASA. Gewinner ist das 12 cm lange Mikroflugzeug des Teams der gastgebenden Uni, mit einer Flugzeit von 14 min.

In Vorwegname der Chronologie: Auch der 10. internationale Wettbewerb für ferngesteuerte Kleinstflieger 2006 wird wieder von der NASA gesponsert, wie auch vom Air Force Research Laboratory.
Diesmal findet er auf dem Utah Valley Aeromodelers Flying Field in der Nähe von Saratoga Springs statt.
Das Team der Brigham Young University beteiligt sich diesmal mit einem Ornithopter – einem Schlagflügler, der wie eine Libelle auch an Ort und Stelle schweben kann.
Nach dem Erstflug im Oktober 2001 geht
die unbemannte, kleine und von
Hand zu startende Flugdrohne RQ-11 Raven der Firma AeroVironment im
Jahr 2002 in
die Serienproduktion für die US-Streitkräfte. Das Miniature Unmanned
Aerial Vehicle (MUAV) wird für die taktische Gefechtsaufklärung in
urbaner Umgebung eingesetzt und sendet Infrarot- und Nachtsichtaufnahmen
in Echtzeit.
Der Elektroflieger muß für den Start von einem Soldaten geworfen werden und fliegt entweder autonom per GPS vorgegebene Wegpunkte ab oder kann per Bodenkontrolle gesteuert werden.
Das je nach Ausstattung 25.000 $ bzw. 35.000 $ teure Gerät ist 1,13 m lang, hat eine Spannweite von 1,31 m und wiegt 1,9 kg. Die offiziell angegebene Fluggeschwindigkeit beträgt 97 km/h, die sogenannte Dienstgipfelhöhe 305 m und die Einsatzdauer beträgt ca. 80 Minuten.

Nachdem sich die RQ-11 im Irak und in Afghanistan bewährt, wird sie auch in verschiedene andere Länder exportiert und steht inzwischen in Australien, Dänemark, Großbritannien, Italien, im Libanon, den Niederlande und in Spanien im Dienst (Stand 2009).
Das ebenfalls von AeroVironment entwickelte MAV Hornet gilt 2002 als das erste MAV, das seine Energie aus einer Wasserstoff-Brennzelle bezieht, die über die Öffnungen auf der Oberseite des ,Flügels’ mit Sauerstoff versorgt wird und durchschnittlich 10 W produziert.
Der Wasserstoff selbst wird in Form von festen, trockenen Pellets mitgeführt und reagiert zusammen mit dem ebenfalls mitgeführten Wasser und dem Sauerstoff in einem Generator, um die Energie zu produzieren.

Die Hornet hat eine Flügelspannbreite von 38 cm, und ihr Gesamtgewicht beträgt nur 170 g. Wie die Wasp (s.o.) wurde sie im Rahmen des DARPA Synthetic Multifunctional Materials Programm entwickelt. Folgegenerationen sollen mit Autopiloten und CCTV-Videokameras ausgerüstet werden.
Am 07.07.2002 findet auf dem Solar-Flugplatz Farrenberg
in Mössingen-Thalheim die Einweihung der vermutlich weltweit
ersten Solar-Tankstelle für Elektroflugzeuge statt. Auf dem Dach
der Halle befindet sich eine 1 kWp Photovoltaikanlage, und 2 Gabelstaplerakkus
mit insgesamt 48 V und ca. 500 Ah (20 kWh) dienen als Speicher.
Nach der Einweihung wird die Silent AE-1 an der Solartankstelle aufgeladen und startet. Das Flugzeug benötigt zum Erreichen einer Höhe von 600 m ca. 2 kWh – also knapp so viel, wie der tägliche Ertrag der Solaranlage.

Zwischen 2002 und 2004 wird
am Institut für Luft- und Raumfahrtsysteme an der Technischen
Universität Carolo-Wilhelmina in Braunschweig und mit Mitteln der EU das MAV Carolo
C40 entwickelt, das anschließend über die Firma Mavionics
GmbH in Braunschweig vermarktet wird, einer Ausgründung des Braunschweiger
TU-Instituts für Luft- und Raumfahrtsysteme.
Der Kleinstflieger Carolo besteht aus einer Hülle aus Kohlenstoff-Fasern, hat eine Spannweite von 40 cm, wiegt 350 g und wird durch einen Elektromotor angetrieben. Die Operationsreichweite beträgt 50 km, bei einer Flugdauer von 45 min.
Quasi zufällig stellt Prof. Rudolf Voit-Nitschmann vom Institut
für Flugzeugbau der Universität Stuttgart mit einer Flugstrecke
von rund 350 km einen neuen Weltrekord für Solarflugzeuge auf.
Er startet am 17. Juni 2003 um 12 Uhr mit dem Solar-Segelflugzeug Icaré II von Aalen-Elchingen in Baden-Württemberg zu einem Werkstattflug (Überprüfung der Elektronik). Bei sehr gutem Wetter kann er über den Wolken in einen Geradeausflug übergehen und erreicht mit ununterbrochen laufendem Elektro-Motor um 17 Uhr den Flugplatz Jena. Er startete allerdings per Flugzeug-Schlepp, ließ sich also von einem Motorsegler auf Flughöhe ziehen. Dadurch wurden die Akkus geschont, die als Energiepuffer dienen.
Die 1996 von Axel Lange gegründete
und in Zweibrücken ansässige Lange Flugzeugbau
GmbH entwickelt
den eigenstartfähigen
und praktisch lautlosen Hochleistungs-Motorsegler Antares 20E.
Dessen Spannweite beträgt 20 m, die Rumpflänge 7,40 m und die
Leermasse 460 kg. Die maximale Abflugmasse beträgt 660 kg, in denen
auch 100 Liter Wasserballast eingerechnet sind.

Erstmals wird eine komplette Antriebskonzeption speziell für ein bestimmtes Segelflugzeug ausgelegt: Ein bürstenloser 42 kW Außenläufer-Elektromotor mit einem Wirkungsgrad von 90 %, eine neuartige Leistungselektronik und ein großformatiger, sehr niedrig drehender Propeller. Der Elektromotor EM42 ist der erste und bislang einzige Elektromotor mit EASA-Zulassung als Flugmotor.
Die beiden speziell entwickelten und optimierten Propellerblätter sind direkt am Außenrotor des Elektromotors befestigt und haben einen Propellerkreisdurchmesser von 2 m. Das Ergebnis sind hohe Steiggeschwindigkeiten (ca. 4,4 m/s beim Start), sehr große Steighöhen (bis zu 3.000 m bei ruhiger Luft) und praktische Lautlosigkeit.
Das Batteriesystem basiert auf Lithium-Ionen Zellen des Typs SAFT VL41M, deren Verfügbarkeit bis mindestens 2031 gesichert ist, da sie auch in den Militärdrohnen ‚RQ-4B Global Hawk’ der US-Army sowie ab 2007 beim ‚F35 Joint Strike Fighter’ Einsatz finden. Voll aufgeladen ermöglichen die Batterien der Antares 20E eine Gesamtsteighöhe von bis zu 3.000 m, und ein kompletter Ladevorgang benötigt 9 Stunden.
Die Machbarkeit und Leistungsfähigkeit des elektrischen Antriebssystems waren erstmals im Versuchsträger LF20 (eine umgebaute DG-800) unter Beweis gestellt worden, dessen Erstflug im Mai 1999 in Zweibrücken stattfand.
Der Erstflug der Antares 20E erfolgt dann 2003, und im Juli 2006 erhält der Elektromotorsegler seine Musterzulassung durch die europäische Zulassungsbehörde EASA – als weltweit erstes mit einem Elektromotor betriebenes Luftfahrzeug überhaupt. Mit der Werknummer 32 wird genau zwei Monate später die erste Antares 20E an Bruce McNaughton übergeben, im Auftrag einer dreiköpfigen Haltergemeinschaft in Tucson, Arizona. Das Flugzeug wird auch als reiner Segler und als ‚Turbo-Version’ mit einem Brennstoff-betriebenen Motor als Rückkehrhilfe angeboten.
der NASA
Im Jahr 2003 bringt das Marshall Space Flight
Center der NASA das erste durch einen Laser betriebene
Flugzeug in die Luft, dessen Entwicklung gemeinsam mit dem Dryden Flight
Research Center in Edwards, Kalifornien, und der University of Alabama
in Huntsville erfolgt war. Als Vorläufer hatte im Sommer 2002 bei
Dryden eine ähnliche Demonstration unter Verwendung eines großen Theater-Scheinwerfers
stattgefunden, bei der bewiesen wird, daß helles, sichtbares Licht
ein kleines Flugzeugmodell mit Strom versorgen kann.
Der 6 W Motor des 312 g schweren Modellfliegers mit einer Spannweite von 1,5 m wird durch Elektrizität versorgt, die von an der Unterseite angebrachten Photozellen stammt, auf welche ein Infrarotlichtstrahl gerichtet wird, der von einem bodenbasierten Laser stammt. Ein Steuersystem sorgt dafür, daß der 1 kW Laser stets auf das in einer Halle herumfliegende Flugzeug gerichtet bleibt.
Zwei Monate nach der ersten Flugvorführung nutzt das Team das gleiche Lasersystem, um eine Drehflügler-Version zu betreiben, die sich entlang von Führungsdrähten bewegt.
Versuche, das für zusätzliche Energie mit zwei Motoren ausgestattete Flugzeug auch außerhalb der Halle zu fliegen, sind nicht erfolgreich, weil das Flugzeug zu leicht ist und die schwache Leistung die Auswirkungen der böigen Winde nicht überwinden kann.
Interessanterweise soll im Juni 2002 auch eine Gruppe am Tokyo Institute for Technology ein kleines Aluminium-Flugzeug mit einem Laser angetrieben haben – indem dieser daran haftende Wassertropfen verdampfte.

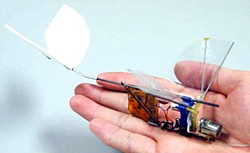
Im Jahr 2004 präsentiert
Seiko Epson einen Micro Flying Robot FR-II mit
12,3 g Gesamtgewicht, integrierter Batterie für 3 min. Flugzeit und
Bluetooth-Modul. Die Propeller werden von zwei Elektrominimotoren
angetrieben.
Das Vorgängermodell von 2003 mußte noch über ein Kabel mit Energie aus einer externen Batterie versorgt werden. Beide Systeme sind mit CCTV-Videokameramodulen ausgestattet.
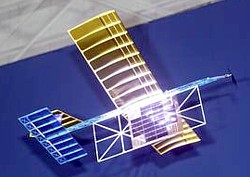
Ab 2004 ist
auch die AeroHydro Research & Technology Associates (AHRTA)
in Pebble Beach, Kalifornien, im Bereich der Micro Air Vehicles (MAVs)
aktiv. Dabei setzt das Unternehmen auf Antriebssysteme mit
oszillierenden Flügeln, die sowohl bei Luft- als auch für Wasserfahrzeuge
zum Einsatz kommen sollen.
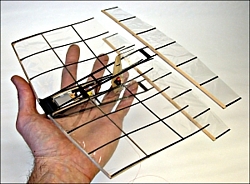
Bei dem MAV von AHRTA, das die Größe eines kleinen Notebooks hat, sind die beiden Flügel als Doppeldecker hinter dem Vorderflügel angeordnet. Während der Doppelflügel mit einer flatternden Bewegung für Antriebsschub sorgt, liefert der feststehende Vorderflügel genügend Auftrieb, um den Miniflieger in der Luft zu halten.
Durch die aerodynamische Wechselwirkung zwischen den drei Flügeln kann sogar bei sehr niedrigen Fluggeschwindigkeiten von 2 m/s ein Strömungsabriß verhindert werden. Außerdem sei das Flatter-Flügel-Design über 60 % effizienter als ein Rotor-Flügel-Design gleicher Größe.
Später will das Unternehmen an einem Luftfahrzeug arbeiten, das fähig ist auch im reinen Schwebeflug zu agieren, ähnlich wie die Flugfähigkeit einer Libelle oder eines Kolibri. Es scheint allerdings, daß die Firma aufgelöst wurde, denn nach diesem Zeitpunkt läßt sich keine weitere Präsenz finden.
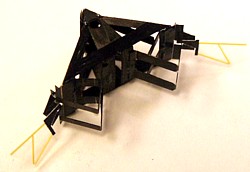
Sehr interessant ist die Abschlußarbeit des
syrischstämmigen Mujahid Abdulrahim an der University
of Florida im
Jahr 2004 unter dem Titel ‚Dynamic Characteristics
of Morphing Air Vehicles’. Die entsprechenden bionischen MAVs werden
seit 2002 in den Fachbereichen Elektro- und Computertechnik
sowie Maschinen- und Luftfahrttechnik der Universität entwickelt –
in Zusammenarbeit mit der DARPA, der NASA, dem Air Force Office of
Scientific Research (AFOSR) und dem Air Force Research Laboratory (AFRL).
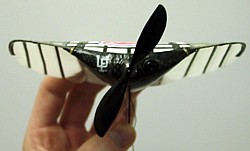
Das Besondere bei diesen MAVs besteht darin, daß sie sich die Flugeigenschaften von Möwen als Vorbild nehmen, indem sich die Form der Tragflächen während des Flugs permanent verändern kann. Dies wird durch den Einsatz von Mikroservomotoren, Mikrosteuereinheiten, Kevlarbändern und einer flexiblen Tragflächenstruktur erreicht.
Ein Morphing MAV verfügt daher über ein hohes Maß an Beweglichkeit, die Fähigkeit zu sehr schnellen Flugmanövern und die Möglichkeit, auch in räumlich eng begrenztem Terrain zu landen. Hier abgebildet ist eines der vielen Test- und Versuchsmodelle mit einer Spannbreite von rund 15 cm.
In seiner Doktorarbeit zeigt Abdulrahim auch, wie es durch die Veränderung der Flügelwinkel (bei einer Verbreiterung des Höhenleitwerks) möglich wird, aus einem Steigflug nahtlos in einen freien Fall überzugehen, ohne daß dabei die Steuerbarkeit des MAV leidet – obwohl der Miniflieger in dieser Fluglage quasi rückwärts fliegt.

Extrem
filigrane Produkte sind die von dem norwegischen Tüftler Petter
Muren entwickelten flugfähigen Mini-Hubschrauber:
Der Microflyer ist mit seinen 7,8 g und 128 mm Rotordurchmesser die größte der Kreationen, und seine Flugzeit beträgt 12 Minuten. Danach kommt der Nanoflyer, der 3,0 g wiegt und einen Rotor von 85 mm Durchmesser besitzt. Dieser hat eine Flugzeit von 10 Minuten. Der dritte Mini-Hubschrauber ist der Picoflyer mit einen 60 mm Rotor und 3,3 Gewicht, der zu diesem Zeitpunkt als der kleinste RC-Hubschrauber der Welt gilt und seinen Erstflug im August 2005 absolviert. Später baut Muren auch einige größeren Modelle.

Im Jahr 2004 erscheint in den Blogs auch der Hinweis auf die patentierte CopterBox, ein leichtes Einweg-Luftfrachtzustellungssystem, das aus einem sich schnell drehenden Pappzylinder mit einem Rotor besteht und für die Lieferung von Notvorräten aus einer Vielzahl von Fluggeräten ausgelegt ist (US-Nr. 5.947.419, beantragt 1998, erteilt 1999; und 6.712.317, beantragt 2002, erteilt 2004).
Die mit 300 $ pro Wurf relativ preiswert Wellpappeschachtel verwendet drei Rotorblätter, die nach dem Prinzip des autorotativen Auftriebs mit ca. 400 U/m arbeiten, um sie und ihre Nutzlast in Form von Munition, Lebensmitteln, Medikamenten und mehr vor dem Bodenkontakt auf einen gemächlichen Sinkflug abzubremsen. Sie kann damit eine Last von 30 kg auf eine Geschwindigkeit von 10 m/s ab verlangsamen. Wirtschaftlich sinnvoll ist die CopterBox insbesondere dort, wo ein Fallschirm nicht praktikabel oder sinnvoll ist.
Ein testweiser Einsatz erfolgt im Sommer 2004 im Irak, als die US-Armee ihre Versorgung aus der Luft modernisiert und dabei neben Systemen, wie computergelenkten Lasten-Fallschirmen (Sherpa Autonomous Parafoil Delivery System).
In diesem Zusammenhang ist zu erfahren, daß die CopterBox mit finanzieller Unterstützung der US-Armee durch die Firma NCŽs DropMaster Inc. in Fayetteville, North Carolina, entwickelt wurde – die ansonsten in keinem anderen Zusammenhang mehr auftaucht und inzwischen wahrscheinlich gar nicht mehr existiert. Die australische Armee nutzt übrigens schon seit Jahren ein ähnliches System namens Helibox.
(Grafik)
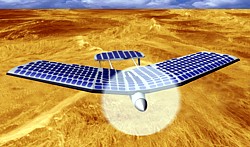
Im
Januar 2005 stellt die NASA das Konzept eines sich automatisch ausklappenden Solarfliegers vor,
der speziell für einen Einsatz in der Atmosphäre der Venus entwickelt
wird.
Das Projekt Venus Airplane des NASA Glenn Research Centers soll einen autonomen Flieger zum Ergebnis haben, der bei einer Flughöhe von 65 km – 75 km Geschwindigkeiten von bis zu 95 m/s erreichen soll.
Eine ebenfalls sehr interessante Entwicklung, die im März 2005 in
der Presse erscheint, geht auf mehrjährige Arbeiten an der Universität
Ulm zurück. Sie hat zwar keinen direkten Bezug zum Elektroflug,
könnte in Zukunft jedoch wesentlichen Einfluß auf die Entwicklung von
biomimetischen Flugobjekten haben, d.h. kleinen Robotern, die fliegen
können wie ein Insekt. Und diese werden zumeist mittels elektrischer
Batterien angetrieben.
Die Arbeitsgruppe um Prof. Fritz-Olaf Lehmann stellt sich die Frage, wie es der Fruchtfliege gelingt, in der Luft zu bleiben, und wie aus ihren Flügelbewegungen aerodynamische Kräfte entstehen. Den erstmals im Jahr 1999 in dem Wissenschaftsmagazin Science veröffentlichten Forschungsergebnissen zufolge kann die nur wenige Millimeter große Taufliege Drosophila so besonders effizient fliegen, weil sie einen bislang unbekannten Effekt nutzt, eine Art Energie-Recycling, während sich der Flügel der Taufliege beim Schwebflug in der Waagrechten 200 mal in der Sekunde hin und her bewegt.
Um diese Bewegung zu erzeugen sind Drehphasen ausschlaggebend, die den Flügel in die entgegengesetzte Richtung führen. Bewegt sich der Flügel hin und her, strömt Luft von oben nach unten. Das Recycling setzt unmittelbar nach der Drehphase am Ende jedes Vor- und Rückschlags ein, denn die Luftströmung vom vorausgehenden Flügelschlag fließt etwas länger nach, so daß der Flügel ein zweites Mal in diese Strömung eintaucht. Physikalisch gesehen wird dabei ein Teil der Bewegungsenergie der Luft aus dem Strömungsfeld extrahiert.
Während die Ulmer Forscher in erster Linie an der Grundlagenforschung interessiert sind, hat eine Forschergruppe an der University of Carlifornia Berkley bereits den Prototyp einer mechanischen Schmeißfliege entworfen, der auf den neu entdeckten Flugeigenschaften basiert – bislang aber noch nicht selbständig fliegen kann. Finanziert wird das deutsche Forschungsprojekt vom Bundesministerium für Bildung und Forschung im Rahmen eines auf fünf Jahre angelegten Biotechnologie-Programms.

Das
erste solar-elektrische UAV Modell von Alan Cocconi,
dem Gründer
der 1992 gestarteten Firma AC Propulsion
Inc. in San Dimas,
Kalifornien, heißt SoLong und
fliegt im Juni 2005 erstmals ununterbrochen 48 Stunden
lang. Damit beweist Cocconi, daß es prinzipiell möglich
ist, während des Tages genügend Energie zu speichern, um
damit die dunklen Nachtstunden zu überbrücken.
Der Flieger hat eine Spannweite von 4,75 m bei einer Flügelfläche von 1,5 m2, und wiegt 12,5 kg. Er ist mit 120 der neuesten Lithium-Ionen-Zellen 18650 von Sanyo ausgerüstet (Gewicht 5,5 kg), die bis zu 1.200 Wh speichern können. Die 76 Stück A300-Solarzellen von SunPower leisten bei einen Wirkungsgrad von 20 % rund 225 W. Der Antriebsmotor mit 800 W Spitze – wobei schon 95 W für das Fliegen ausreichen – erlaubt eine Höchstgeschwindigkeit von 96 km/h.
Eine andere interessante Geschichte begann schon
weit früher: Im April 1979 gelingt Larry
Mauro, Entwickler
des bekannten UFM Easy Riser, der weltweit erste akkugestützte Solarflug
mit einem manntragenden, voll steuerbaren Flugzeug namens Solar
Riser.

Das Ultraleichtflugzeug, ein 2,4 m langer Nurflügel-Doppeldecker mit einer Spannweite von 9 m, fliegt in etwa 12 m Höhe ca. 800 m weit und landet auch wieder sanft. Für den Bau nutzt Mauro einen bestehenden Gleiter, auf dem er mehrere Solarpaneele installiert (30 V / 350 W), welche die ebenfalls installierte Hughes 500 Helikopterbatterie aufladen, die wiederum einen 3 PS Elektromotor versorgt. Nach einer Aufladezeit von mindestens eineinhalb Stunden kann der (leer) 55 kg schwere solare Gleitflieger mit einem maximalen Startgewicht von 139 kg drei bis fünf Minuten lang aufsteigen, um genügend Höhe für einen anschließenden Gleitflug zu erreichen. Die maximale Höchstgeschwindigkeit beträgt 32 km/h.
Bevor Mauro den Solar Riser im selben Jahr dem EAA AirVenture Museum spendet, zeigt er ihn dem Entwickler, Piloten, Fluglehrer und Luftbildfotografen Eric Raymond. Dieser wiederum besucht 1986 Günter Rochelt und lernt dabei dessen Flugzeug-Familie kennen. Ein Flug in der Musculair II beeindruckt ihn so stark, daß er mit einer Eigenentwicklung beginnt.
Raymond gründet daraufhin die Firma Solar Flight Corp., und durch die Unterstützung von Sanyo und anderer Unternehmen ab 1988 gelingt es ihm, mit seinem 89 kg wiegenden und mit polykristallinen Solarzellen bestückten Sunseeker Ende 1989 den Erstflug als Gleiter zu absolvieren.

Im Jahr 1990 werden mehrere batteriegespeiste Testflüge mit zwei Bürstenläufermotoren durchgeführt, die einen faltbaren Verstellpropeller antrieben. Da dieser Antriebsstrang allerdings nicht zufriedenstellend arbeitet wird ein bürstenloser Wechselstrommotor mit Faltluftschraube installiert. Nach vielen langen Testflügen überfliegt Raymond im August 1990 die USA von Kalifornien bis North Carolina – und zwar in 21 Einzelflügen von bis zu 400 km, und mit einer Gesamtflugzeit von 121 Stunden.
2005 und 2006 wird der Sunseeker in Zusammenarbeit mit Alan Cocconi und der AC Propulsion in San Dimas, Kalifornien, weiter aufgerüstet, wobei ein stärkerer Motor, Lithium-Batterien, ein Planetengetriebe und ein fortschrittlicher Faltpropeller installiert werden. Weitere Informationen finden sich in der laufenden Chronologie. Die Erfahrungen mit diesem Flieger fließen außerdem in den Bau des nur 69 kg wiegenden Ultraleicht-Segelflugzeugs Edelweiss, das allerdings robuster, und durch eine geringere Spannweite von 14,6 m auch manövrierfähiger und schneller ist. Es wird jedoch nicht solar angetrieben.
Im Rahmen des Vehicle Systems Program der NASA wird inzwischen weiter
an der Entwicklung solarbetriebener ‚Atmosphären-Satelliten’ gearbeitet.
Die HALE
UAV (High Altitude Long Endurance Unmanned Air Vehicles), sind
automatisierte, selbständige Flieger, die zwischen 2010 und 2015 in
Betrieb gehen sollen.
Hinweis: Die weiteren Präsentationen
sind aufgrund des zunehmenden Umfangs und zur besseren Übersichtlichkeit
nach Jahren unterteilt.
Weiter mit den Elektro- und Solarfluggeräten...