Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und Solarschiffe (IX)
2014
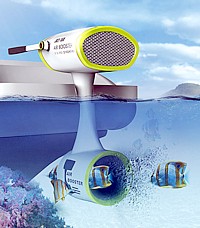
Im Januar wird auf der boot Düsseldorf 2014 ein
neues Wassersportgerät vorgestellt, das teils Surfbrett und teils Wassermotorrad
ist, mit einer Geschwindigkeit von bis zu 35 km/h über flaches Wasser
saust und über einen Bluetooth-Handregler gesteuert wird.

Das von dem deutschen Ingenieur Markus Schilcher und seiner in Oberammergau beheimateten Firma Waterwolf seit etwa 2009 entwickelte MXP-3 kann jeden Baggersee oder Fluß in einen spannenden Surfspot verwandeln. Diese Sportart läßt sich am besten als ,elektrisches Moto-Surfen’ beschreiben.
Das neue MXP-3 wird von einem darunter angebrachten 5 kW (7 PS) starken Elektromotor angetrieben, der einen Propeller im Heck antreibt. Der verbaute 20 Ah Lithium-Ionen-Akku bietet Fahrspaß für 20 - 25 Minuten (andere Quellen: 30 - 40 Minuten) oder 8 km Reichweite. Die Geschwindigkeits- und Batterieinformationen lassen sich auf einem vorn am Brett installierten LCD-Bildschirm ablesen. Als Sicherheitsvorkehrung verfügt das Board über einen magnetischen Not-Aus-Schalter, der durch Ziehen an der Handgelenksleine aktiviert wird. Sollte der Fahrer herunterfallen, zieht der Zug an der Leine den magnetischen Stecker heraus und unterbricht sofort den Strom.

Das aufgrund seiner Bauart sehr wendefreudige Surfbrett wird in zwei unterschiedlichen Klassen mit 240 bzw. 245 cm Länge angeboten. Die leichtere Version wiegt insgesamt 23 kg und ist für ein Körpergewicht von bis zu 85 kg ausgelegt. Wer schwerer ist, muß auf die größere, 25 kg schwere Version zurückgreifen. Der Akku kann in 3 - 3,5 Stunden wieder neu geladen werden. Da er austauschbar ist, bietet die Firma auch Ersatz-Akkus an, um die Fahrt schnell wieder aufnehmen zu können.
Das MXP-3 soll im Mai in den Verkauf gehen, die Standardversion kostet 6.990 € (andere Quellen: knapp 8.400 €). Die Firma ist nicht mit dem dänischen Unternehmen Water Wolf zu verwechseln, das auf Unterwasserkameras für Angler spezialisiert ist.
Daß es auch beträchtlich günstiger geht, belegt das in Seattle ansässige
Unternehmen Current Drives, das ab Februar 2014 einen
Zusatz-Elektromotor für Stand-up-Paddleboards (SUPs) anbietet, die
immer beliebter werden. Das System macht es leicht, mit beiden Händen
zu fischen, während man flußaufwärts unterwegs ist.

Das ElectraFin genannte System besteht aus drei Hauptkomponenten. Zunächst gibt es eine aus Polyethylen gefertigte Motor-Propeller-Flossen-Einheit, die in weniger als einer Minute in den Flossenkasten an der Unterseite der meisten SUPs geschoben werden kann. Ein Stromkabel führt von dort aus um die Rückseite des SUP herum zu einem wasserdichten Akkupack, das oben auf dem Board angebracht wird - und ziemlich improvisiert aussieht. Schließlich gibt es noch eine kabellose Geschwindigkeitssteuerung, die der Fahrer am Handgelenk trägt.
Der 240 W Motor und der Lithium-Ionen-Akku tragen zusammen 6,4 kg zum Gewicht des Boards bei. Sie können es vier Stunden lang auf eine Höchstgeschwindigkeit von 8 km/h oder etwa 26 km weit bringen - oder länger, wenn man nicht mit voller Geschwindigkeit fährt. Das Aufladen des Akkus soll eine Stunde pro zwei Stunden Nutzung dauern.
Die wasserdichte Fernbedienung ermöglicht die Geschwindigkeitsregelung, zeigt den Ladezustand der Batterie an und schaltet den Motor ab, wenn sie mehr als 3 m davon entfernt ist, wie es bei einem Sturz des Fahrers der Fall wäre. Flachwasser-Kajakfahrer können die Vorteile einer kajakspezifischen Version der ElectraFin nutzen. In diesem Fall wird der Antrieb wie ein normales aufklappbares Kajakruder am Heck des Bootes angebracht.
Current Drives sammelt auf Indiegogo Geld für die ElectraFin, die hier für 850 $ angeboten wird. Was auch erfolgreich ist, denn der Zielbetrag von 15.000 $ wird weit überschritten, als nur 57 Unterstützer 35.000 $ zusammenbringen.

Ziemlich ähnlich ist der Bixpy Jet der von Houman
Nikmanesh aus San Diego gegründeten kalifornischen Firma Bixpy
USA, der im Juli 2016 in den Blogs erscheint
und sich durch eine besondere Vielseitigkeit auszeichnet, da er ein
Stand-up-Paddleboard ebenso antreiben kann wie ein Kajak, ein Kanu
und sogar eine Person selbst.
Der Antrieb wurde als Reaktion auf eine Beinahe-Katastrophe entwickelt. Zwei Jahre zuvor hatten einige der späteren Teammitglieder mit heftigen Winden und Strömungen zu kämpfen, als sie mit dem Kajak zur Küste von San Diego zurückfuhren. Es klappte, aber die Paddler erkannten den Ernst der Lage, in der sie sich befunden hatten, und machten sich an die Arbeit, einen kompakten Kajakmotor zu konstruieren. Daraus wurde schließlich ein einziger Zusatzantrieb für mehrere Wassersportarten, der etwa so groß wie eine 1-Liter-Wasserflasche ist.

Die primäre Bixpy Jet-Einheit wiegt etwa 0,9 kg und verfügt über einen speziell angefertigten Motor, der einen Propeller in einem Gehäuse antreibt. Hinzu kommen verschiedene Akkus und Befestigungselemente, um den Antrieb bei verschiedenen Aktivitäten einzusetzen. Beginnend mit der Kajakversion, die ursprünglich entwickelt werden sollte, bietet Bixpy die Komponenten in verschiedenen Kits an.
Das Outboard Jet Kit ist ein allgemeiner Bausatz, der für verschiedene Arten von kleinen Booten geeignet ist. Er verfügt über Aluminiumarme, die sich an das jeweilige Modell anpassen lassen, einen Joystick-Lenkmechanismus und einen 450 Wh Lithium-Ionen-Akku, der sich in vier Stunden aufladen läßt. Die Laufzeit bei kontinuierlicher Nutzung bei Höchstgeschwindigkeit von 11 km/h soll eine Stunde betragen, oder 2 - 6 Stunden bei normaler Nutzung. Die geschätzte Reichweite liegt bei 16 - 24 km.

Das SUP Jet Kit verwandelt den Bixpy Jet in einen Stand-up-Paddleboard-Motor, der gegen die Mittelfinne des Boards ausgetauscht wird, während die Batterie oben auf dem Deck befestigt wird. Mit der kabellosen Armbandfernbedienung läßt sich die Geschwindigkeit auf etwa 10 km/h erhöhen, die angegebenen Laufzeiten sind die gleichen wie für das Outboard-Kit.
Was Bixpy so besonders macht, ist das Swim Jet Kit, das anstelle des großen Kastenakkus einen 180 Wh Röhrenakku verwendet und zu einem 2,3 kg schweren Handgerät zusammengebaut wird, das den Schwimmer auf Knopfdruck durch das Wasser schießen läßt. Der Swim Jet ist für eine Betriebsdauer von 45 Minuten bis zwei Stunden und eine Tauchtiefe von bis zu 27 m ausgelegt. Er verfügt über zwei Geschwindigkeiten und enthält zudem ein eingebautes Licht und eine Action-Cam-Halterung. Der Akku läßt sich in etwa zwei Stunden aufladen. Über ähnliche Produkte wird in dem späteren Schwerpunkt Unterwasser-Scooter noch ausführlich berichtet.
Die Kits, die alle mit einer magnetischen Notabschaltleine ausgestattet sind, befinden sich noch nicht offiziell im Verkauf und Bixpy gibt die Preise derzeit nur pro Paket an, wobei das Outboard Jet Kit mit 1.099 $, das SUP Jet Kit mit 999 $ und das Swim Jet Kit mit 750 $ beziffert werden.

Das Unternehmen startet im September 2016 eine Kickstarter-Kampagne zur Finanzierung der ersten 500 Produktionseinheiten des modularen Wasserstrahl-Antriebssystems, die jedoch nicht erfolgreich ist. Trotzdem gelingt es Bixpy, auf dem Markt Fuß zu fassen. Im Jahr 2023 folgt das Modell K-1 Outboard Kit, für das im Mai eine Kampagne auf indiegogo beginnt - die diesmal das Ziel von 50.000 $ weit übertrifft, als 228 Unterstützer insgesamt 319.626 $ beisteuern.
Im Februar 2024 folgt ein kompaktes, tragbares Elektroantriebssystem auf Basis des K-1, das gemeinsam mit der Firma Oru Kayak entwickelt wurde, die seit langem einige der kompaktesten tragbaren Wasserfahrzeuge auf dem Markt anbietet.
Auf dem Wasser wird der K-1 durch das mitgelieferte Outboard Power Pack angetrieben, das eine geschätzte Laufzeit zwischen 80 Minuten und zwölf Stunden bietet, je nachdem, welche der zwölf Geschwindigkeiten der Paddler gewählt hat. Das E-Drive Kit (o. ePropulsion eLite), das mit allen Kajakmodellen kompatibel ist, ist für 1.299 $ erhältlich.
(Grafik)
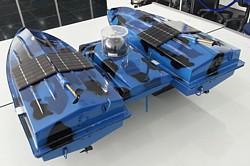
In diesem Kontext sollen noch die Varianten anderer Entwickler und Produzenten erwähnt werden, die in den Folgejahren zu sehen sind. Dazu gehört im März 2014 ein Entwurf der Designer Gangyoon Chang, HoYeon Kim, Kiwon Lee und Jiman Lee. Der AIR BOOSTER ist ein neues Konzept von Bootsmotoren, die durch den Verzicht auf einen Propeller keine Gefahr mehr für die Meeresbewohner darstellen. Statt
dessen wird das Boot durch Luftdruck bewegt.
Anstelle von scharfen, sich drehenden Schaufeln, wie sie typischerweise im Sockel von Motorbooten zu finden sind, hat der AIR BOOSTER Motor kleine innere Turbinen und die Fähigkeit, Luft unter Druck zu setzen und auszustoßen. Er saugt sie von vorne an und schickt sie mit großer Geschwindigkeit nach unten und nach außen, um für Schub zu sorgen.
Das Konzept, das sich sicherlich auch bei Boards hätte anwenden lassen, scheint aber nicht weiterverfolgt worden zu sein, es finden sich auch keine näheren Angaben zu der angedachten Leistung oder Stromversorgung.
Erwähnenswert ist auch das elektrische Surfbrett Aquila der gleichnamigen spanischen Firma Aquila (o. Aquila Boards), das im Juli 2014 gezeigt wird. Die Firma ist ein Spin-off von Bizintek Innova, einem auf Elektronik spezialisierten Unternehmen für Produktentwicklung und Engineering, und begann ursprünglich als Projekt zur Entwicklung eines elektrischen Antriebssystems für den Einsatz im Wassersport.

Dank der in den letzten Jahren erzielten Verbesserungen in der Batterietechnologie verfügen die Boards über ein vollständig integriertes, elektrisch betriebenes Jet-Antriebssystem, das weder Lärm noch Emissionen verursacht. Es nimmt etwas Wasser aus dem unteren Teil des Boards auf und setzt es durch die Düse am Heck unter Druck, wodurch das Board den nötigen Schub erhält, der über eine drahtlose Fernbedienung reguliert wird. Die Akkus sind austauschbar.
Das Unternehmen prüft nun das Interesse an drei Elektro-Board-Designs: Das Einsteigermodell Manta mit einer Höchstgeschwindigkeit von 33 km/h und einer Akkulaufzeit von 30 Minuten, das 230 x 98 cm mißt und im Einzelhandel für 2.800 € angeboten werden soll; der 245 x 68 cm große Carver für Hochgeschwindigkeits-Slalomfahrten mit bis zu 71 km/h, der 3.300 € kosten wird; sowie das auf Freestyle-Fahrer ausgerichtete Blade, das nur 185 x 60 cm mißt, 18 kg wiegt und eine Höchstgeschwindigkeit von 53 km/h erreicht. Der Preis liegt bei 2.900 €.
Die Aquila sucht jetzt nach Investoren. Ziel ist es, im Jahr 2015 in die Produktion einzusteigen. Es lassen sich aber keine Details über eine Umsetzung finden - und Anfang 2023 befindet sich die Firma in Liquidation.

Im September folgt auf dem Cannes Yachting Festival mit dem elektrischen Wakeboard Radinn der schwedischen Unternehmer Alexander Lind und Philip Werner ein Gerät mit einem Gehäuse aus Kohlefaser und einem salzwasserbeständigen Jet-Antriebssystem, das von einem wechselbaren Lithium-Akkupack in einem wasserdichten Fach angetrieben wird. Das gesamte Board wiegt inklusive Akku etwa 29 kg.
Die Geschwindigkeit wird über eine kabellose Handfernbedienung gesteuert. Das Board kann derzeit mit bis zu 25 Knoten (46 km/h) fahren, obwohl die endgültige kommerzielle Version noch schneller sein wird. Eine Akkuladung soll für 45 - 60 Minuten bei gemischten Geschwindigkeiten oder 20 - 30 Minuten bei voller Fahrt reichen.
Es werden normale Wakeboard-Fußbindungen verwendet, die für Anfänger abgenommen werden können - so können Neulinge auf dem Brett kniend oder liegend beginnen. Das Radinn soll noch in diesem Winter in Produktion gehen, die Auslieferung an Vorbesteller für 15.000 € ist für nächstes Jahr geplant. Auch die Firma Radinn wird im November 2023 für insolvent erklärt.
Eher konventionell aufgebaut ist die
von Dmitri Kozhevnikov und Alexei
Ostanin und ihrem kalifornischen Unternehmen Boost
Surfing in Huntington Beach entwickelte Boost Surfing
Fin, die im Dezember 2019 in den Blogs
erscheint. Die Konstrukteure hatten Ende des Vorjahres ihren ersten
und anschließend noch zwei weitere Prototypen gebaut, bevor im August
der erste Test auf offener See erfolgen konnte.

Surfing Fin
Die motorisierte Finne besteht aus einer Kombination aus ABS-Kunststoff und Glasfaser und wiegt nur 771 g, ihr schlankes Design minimiert den Wasserwiderstand. Da sie mobil ist, kann sie in wenigen Minuten von Brett zu Brett übertragen werden, so daß Surfer sie an jedem Tag auf dem Surfbrett nutzen können, das ihren Bedürfnissen am besten entspricht.
Die Stromversorgung des 800 W Motors erfolgt über eine 90 Wh oder 200 Wh Lithium-Batterie, aktiviert wird er über eine am Board oder am Handgelenk befestigte bzw. in der Hand gehaltene Funkfernbedienung. Der Motor bringt das Board dann je nach gewählter Boost-Länge für acht oder 20 Sekunden auf eine Höchstgeschwindigkeit von 18 km/h. Pro 60- bis 90-minütiger Aufladung ist eine Gesamtlaufzeit von zwei Stunden möglich.
Die Kickstarter-Kampagne, die bis zum Januar 2020 läuft und bei der der Motor zu einem Preis ab 149 $ angeboten wird, ist ausgesprochen erfolgreich, als 1.046 Unterstützer mit 243.958 $ dazu beitragen, das Projekt zu verwirklichen. Auch hier war der Zielbetrag nur 50.000 $. Der später geplante Verkaufspreis liegt bei 299 $. Die Auslieferung beginnt im Mai.
Ein wesentlich massiveres Teil wird im August 2022 vorgestellt. Das von einem Team von Wassersportlern und Ingenieuren aus Portland, Oregon, entwickelte, 15 kg schwere Gerät verfügt über einen einzigen wassergekühlten elektrischen Jet-Antriebsmotor.

Frühere Prototypen verfügten über zwei solcher Motoren - einen auf jeder Seite des Boards/Kajaks -, die jedoch zu viel Widerstand erzeugten und zu viel Batteriestrom verbrauchten.
Die aktuelle Version des HydroJet (HJ) wird mit einem speziellen Gurtsystem am hinteren Teil des Wasserfahrzeugs befestigt und ermöglicht eine Höchstgeschwindigkeit von über 27 km/h. Eine Ladung des herausnehmbaren 44 Ah Lithium-Ionen-Akkus soll für bis zu 80 Minuten Laufzeit reichen. Die Steuerung erfolgt über eine kabellose Handfernbedienung und durch Verlagerung des eigenen Körpergewichts und/oder mit Hilfe eines Paddels. Details zum genauen technischen Aufbau oder zum Motor selbst gibt es keine.
Auch der HydroJet ist Gegenstand einer Kickstarter-Kampagne, bei der das Exemplar für 1.100 $ zu erhalten ist, während der spätere Einzelhandelspreis zwischen 1.300 und 1.400 $ liegen soll. Diese Kampagne erreicht aber nicht das Finanzierungsziel von 60.000 $, denn bis September kommen nur 35.452 $ zusammen - was dann auch das Letzte ist, was über den HydroJet zu erfahren ist.

(Grafik)
Im Zuge der allgemeinen Jahresübersicht ist der von dem Schweizer Diplomdesigner Timon Sager aus Zug entworfene Daycruiser Nimue 490 vom Februar 2014 zu erwähnen, der sich durch eine außergewöhnliche Karosserie und sein schlankes Design mit einem sich stark verjüngenden Bug auszeichnet, das durch den Windschutz betont wird, der sich über das Heck erstreckt. In den Rahmen sind ausziehbare Paneele integriert, die die Gäste bei Bedarf schützen.
Die 14,95 m lange und 4,04 m breite Nimue 490 ist für bis zu acht Personen ausgelegt und bietet mit ihrem innovativen Steuermechanismus, bei dem sich der gesamte Bug gezielt verbiegt, eine hohe Manövrierfähigkeit. Dank der drei Flexibilitätspunkte an der Vorderseite wird das Wenden bei hohen Geschwindigkeiten viel einfacher und schneller. Dieser Shape-Shifting-Aufbau basiert auf dem Konzept Protei von Cesar Harada, einem formveränderlichen Segelroboter, der im Kapitelteil Segelschiffe beschrieben wird.
Der elektrische Antrieb verleiht dem Boot eine Geschwindigkeit von bis zu 42 Knoten (77,8 km/h), die Reichweite wird mit 2.200 km angegeben - allerdings ohne jegliche Details zu dem dafür erforderlichen Batteriepaket. Bis jetzt ist die Nimue 490 nur ein Konzept, und es ist fraglich, ob sie jemals real umgesetzt wird.
Im April 2014 wird berichtet, daß auf der Elbe derzeit ein im März 2013 fertiggestelltes hybridelektrisches Lotsenboot (o. Lotsentender) erprobt wird, das mit einem EcoProp-Hybridantrieb von Siemens ausgerüstet ist: Ein 900 kW starker MTU-Diesel treibt das Schiff an, dabei kann überschüssige Energie von einem Generator genutzt werden, um das Schiff mit Strom zu versorgen. Ein weiterer Generator wird von einem Volvo-Penta-Dieselmotor angetrieben. Zudem ist das Schiff mit einem elektrisch angetriebenen Bugstrahlruder ausgestattet.

Im Elektrobetrieb treibt der Siemens-Elektromotor den Propeller alleine an, wobei das Lotsenboot in diesem Modus ein Drittel der möglichen Höchstgeschwindigkeit von 17 Knoten (31,5 km/h) erreicht.
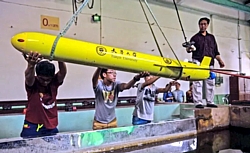
Die 20,5 m lange und 12,3 m breite Explorer ist eine Weiterentwicklung der seit 1999 in der Deutschen Bucht bewährten SWATH (Small Waterplane Area Twin Hull)-Schiffe. Das sind Schiffe, die auf zwei unter der Wasseroberfläche gelegenen, torpedoförmigen Auftriebskörpern fahren. Sie reagieren weniger stark auf Wind oder Wellen und können deshalb auch bei hohem Seegang ein sicheres Umsteigen des Lotsen vom Boot auf das zu leitende Schiff gewährleisten.
Bei der Explorer sind die beiden seitlichen Auftriebskörper durch eine Röhre in der Mitte ersetzt, wobei zwei an den Seiten angebrachte Ausleger für Stabilität sorgen. Aus der Röhre heraus wird das Boot auch angetrieben. Mit dem neuen Einrumpfkonzept ist das SWASH (Small Waterplane Area Single Hull)-Schiff leichter und wendiger als seine Artgenossen.
Nach einer mehrjährigen erfolgreichen Erprobung in der Elbmündung vor Brunsbüttel wird die Explorer Anfang April 2017 von der Explorer GmbH & Co. KG, einer Tochtergesellschaft der ABEKING & RASMUSSEN Schiffs- und Yachtwerft SE (A&R), an das Bundesministerium für Verkehr und Digitale Infrastruktur verkauft. Es ist das bisher einzige Schiff nach dem SWASH-Konzept - das von A&R zudem auf eigene Kosten gebaut und dem Nutzer zur Langzeit-Erprobung zur Verfügung gestellt wurde. Es wird nun vom Lotsbetriebsverein e.V., Außenstelle Cuxhaven, betrieben und im Lotsversetzbetrieb vor Brunsbüttel eingesetzt.
Im Zusammenhang mit Lotsenbooten ist zu erwähnen, daß das in British Columbia ansässige kanadische Schiffsbauunternehmen Robert Allan im April 2018 ein neues vollelektrisches Lotsenboot mit der Bezeichnung RAlly 1600-E vorstellt. Mit seinem Doppelschrauben-Antrieb erreicht es eine Höchstgeschwindigkeit von bis zu 20 Knoten und ist für Kurzstrecken von bis zu fünf Seemeilen ausgelegt, bei denen zwischen den Aufträgen ausreichend Zeit ist, um die Batterien zu laden. In diesem Szenario kann das Boot einen kompletten Betrieb mit 30 % der nominalen Batteriekapazität durchführen.

Als Lotsenboot übernimmt es beim Auslaufen eines Schiffes aus einem Hafen nach Erreichen der offenen Gewässer den Transport des Lotsen zurück in den Hafen oder zur Lotsenstation an der Küste bzw. bringt den Lotsen zum eintreffenden Schiff.
Der neue Prototyp ist im Gegensatz zu seinem stählernen Vorgänger aus Aluminium gefertigt und arbeitet mit zwei 500 kW starken Elektromotoren und einem flüssigkeitsgekühlten Batteriesystem mit einer Kapazität von 815 kWh, das aus aus 70 Modulen besteht und in der Mitte des Bootes zwischen den Aufenthaltsräumen und dem Maschinenraum verbaut ist. Der Antriebsstrang wird von zwei Hilfsgeneratoren begleitet, die bei Bedarf eingesetzt werden können.
Laut Hersteller hat das 16 m lange und 5 m breite Schiff dasselbe Gesamtgewicht wie sein mit Diesel betriebenes Pendant aus Stahl, da das Zusatzgewicht von E-Antrieb und Batterien durch die Aluminiumhülle und das Weglassen von Dieselmotoren, -komponenten und Treibstoff ausgeglichen wird. Außerdem ist es um einiges leiser als vergleichbare dieselbetriebene Lotsenboote.
Im Mai 2019 folgt die Meldung, daß die Londoner Hafenbehörde Port of London Authority (PLA) das „weltweit erste Hybrid-Lotsenboot“ zu Testzwecken zu Wasser gelassen hat, das große Schiffe in den Hafen steuert. Die PLA hatte im Juni des Vorjahres der Werft Goodchild Marine aus Yarmouth einen entsprechenden Bauauftrag gegeben. Das Boot soll bald auf einer der schwierigsten Wasserstraßen der Welt - der Themse von Gravesend bis zur Tower Bridge - zum Einsatz kommen und den 1982 gebauten Diesel-Lotsenkutter Patrol ersetzen.

der PLA
Das neue Lotsenboot nutzt hingegen eine Kombination aus Diesel- und Elektroantrieb: Das von Transfluid gelieferte Parallelsystem koppelt einen 400 PS Yanmar-Motor mit vier 75 kW Elektromotoren (zwei pro Welle) und einer Lithium-Ionen-Batterie. Diese kann vom Land aus aufgeladen werden, aber zusätzlich ist das Getriebe so konfiguriert, daß die Antriebswelle beim Einschalten des Dieselmotors auch die Batterie auflädt. Das Boot kann mit einer Batterieladung etwa 40 Seemeilen bei einer Geschwindigkeit von bis zu 15 Knoten fahren. Die Dieselmotoren können die Höchstgeschwindigkeit auf bis zu 19 Knoten erhöhen und den Elektroantrieb bei längeren Arbeitszyklen unterstützen.
Um das Gewicht der Batterie von 3 Tonnen auszugleichen, werden für den Rumpf, für die Innenstrukturen und die Armaturen die neuesten Leichtbaumaterialien verwendet. Außerdem maximiert das wellenbrechende Rumpfdesign des Boots die Effizienz des Elektro- und Hybridsystems. Laut Goodchild zeigen Hochrechnungen, daß das Boot 90 % der Zeit elektrisch betrieben werden kann.
Auch auf anderen Sektoren gehen die Bemühungen zur Elektrifizierung
des Schiffsverkehrs und dessen stärkerer Einbindung in urbane Netze
weiter. So wird im Mai 2014 über das schwedische
Forschungs- und Innovationsprojekt Waterway
365 berichtet, das im Vorjahr von der Königlichen
Technischen Hochschule (KTH) in Stockholm in Zusammenarbeit
mit der Vattenbussen AB gestartet worden war, einer
unabhängigen Organisation, die sich für nachhaltigen öffentlichen Nahverkehr
auf urbanen Wasserwegen einsetzt. Das Projekt wird von der schwedischen
Seefahrtsbehörde unterstützt.

(Grafik)
Als Ergänzung des öffentlichen Nahverkehrssystems der Stadt schlagen die Forscher um Karl Garme und Susanna Hall Kihl vor, Wasserbusse einzubinden, deren innovatives Systemdesign die Effizienz der Schnittstelle zwischen land- und wasserbasierten Verkehrsträgern verbessern soll. Hierzu müssen die Wasserbusse effizient in das Landverkehrssystem integriert werden, sowohl an den Umsteigepunkten als auch bei den Zahlsystemen. Die Boote sollen auch mehr wie eine U-Bahn oder ein Bus funktionieren, bei denen man an den Seiten ein- und aussteigt und nicht am Bug oder Heck. Was dann aber nicht ganz zu der Grafik paßt.
Da die Wasserbusse das ganze Jahr über verkehren, wird vorgeschlagen, in den Zeiten, in denen die Wasserwege vereist sind, eisbrechende Schiffe einzusetzen, ähnlich wie Schneepflüge. Dies würde es ermöglichen, die Wasserbusse aus leichterem Material zu bauen, um im Sommer Energie zu sparen, wenn kein schwerer, stahlverstärkter Rumpf mitgeführt werden muß, der dann nicht gebraucht wird.
Der Systementwurf der KHT sieht einen Wasserbus vor, der modular aufgebaut ist und unterschiedlich große Abteile für verschiedene Bedürfnisse hat. Außerdem soll er sowohl bei der Produktion als auch bei der Nutzung besonders energieeffizient sein. Auf der Website des Projekts finden sich diverse Berichte und Studien darüber - bis hin zu einem rein elektrisch angetriebenen Fährverkehr, der als eine kostengünstige Lösung betrachtet wird.
Wissenschaftler der Universiti Malaysia Perlis (UniMAP) um Muhammad Najib Khir Othman präsentieren wiederum im Mai den Prototypen eines unbemannten Wasserfahrzeugs (USV), das gegenüber schlechtem Wetter auf See besonders gut gewappnet ist, welches für patrouillierende Boote dieser Art oft verheerende Folgen hat.
Das batteriebetriebene Wasserfahrzeug mit dem Namen Sea-Eye hat ein Design, das es ihm ermöglicht, auch dann noch zu funktionieren, wenn es umkippt und in Rückenlage schwimmt. Durch die katamaranähnliche Konstruktion mit zwei Rümpfen liegt es sowieso stabiler im Wasser als ein Einrumpfboot, aber sein besonderes Merkmal ist der Verzicht auf Stabilisierungssysteme, die normalerweise in USVs integriert sind, um sie vor dem Kentern zu schützen.
Stattdessen gibt es zwei Sätze Propeller, einen oberen und einen unteren, und wenn das Boot umkippt, schalten sich die oberen Propeller aus und die unteren automatisch ein, wodurch es sich auch kopfüber weiterbewegen kann. Nähere technische Daten über Antrieb und Batterie werden nicht genannt.
Das Sea-Eye kann manuell ferngesteuert werden oder kann mit Hilfe von GPS autonom arbeiten. Es kann auch so programmiert werden, daß es über GPS zu einem bestimmten Koordinatensatz navigiert, wobei es seinen Standort kontinuierlich an die Basisstation zurücksendet.
Das USV wird mit Hilfe der auf beiden Seiten angebrachten Solarzellen aufgeladen, so daß es immer genug Energie hat, um automatisch zu den Startkoordinaten zurückzukehren, wenn es außer Reichweite gerät und das Signal verliert. Derzeit funktioniert der Prototyp bis zu einer Reichweite von etwa 2 km von der Basisstation. Ein bordeigenes Sonarsystem hilft dem Sea-Eye bei der Minensuche unter Wasser, und es gibt zwei Tag- und Nachtsichtkameras, die sowohl unter als auch über der Wasseroberfläche für Sicht sorgen, während es mit einer Geschwindigkeit von 50 - 60 km/h durch das Wasser pflügt.
Verheerend ist auch ein Unfall, bei dem in diesem Monat der Tiefseeroboter Nereus - einer der modernsten der Welt - bei einem Einsatz im Kermadecgraben vor Neuseeland in knapp 10.000 m Wassertiefe zerstört wird, als er durch den immensen Wasserdruck implodiert. Der 5 Mio. $ (andere Quellen: 8 Mio. $) teure Nereus stellte eine Mischform aus ferngesteuertem Unterwasserfahrzeug (ROV) und autonomem Unterwasserfahrzeug (AUV) dar. Er war eigentlich für extrem tiefe Gewässer bis zu 11.000 m konzipiert und hatte im Mai 2009 auch erfolgreich eine Erkundung des Marianengrabens absolviert, bei der er bis auf 10.902 m Tiefe hinabgesunken war.

Entwickelt wurde der Tauchroboter durch die Woods Hole Oceanographic Institution (WHOI), die Hopkins University und das U.S. Navy Space and Naval Warfare Systems Center. Der etwa 4,25 m lange und 2,8 Tonnen schwere Nereus bestand aus einem Aluminium-Gerüst, in das die einzelnen Komponenten eingebettet waren. Sensible Instrumente wie Kameras, Elektronik und LED-Scheinwerfer wurden durch Keramikhüllen vor dem hohen Druck geschützt, während der Auftrieb durch hohle Keramikkugeln gewährleistet wurde. Ebenfalls in dem Gerüst eingebaut waren u.a. Sonargeräte sowie Lithium-Ionen-Akkus, die für anderthalb Tage reichten.
Das Unglück im Mai 2014 geschah während einer 40-tägigen Expedition am Tag mit den tiefsten Tauchtiefen des Vorhabens. Erst ging die Kommunikation zu Nereus verloren – ein Ereignis, das schon öfters eingetreten war, wenn das nur ein Zehntausendstel Zoll dicke Glasfaserkabel wieder einmal gebrochen war – doch dann tauchten einzelne Trümmerteile an der Wasseroberfläche auf, die die Merkmale einer Implosion aufwiesen.
Über andere Tiefsee-Tauchboote - besonders die bemannten - wurde bereits in früheren Übersichten berichtet: Die Trieste (1960) und der Deepsea Challenger (2012) finden sich hier, die chinesische Jiaolong (2022) hier. Darüber hinaus tauchte der US-amerikanische Investor und Entdecker Victor Lance Vescovo im Rahmen der Five Deeps Expedition im Jahr 2019 mit dem Tiefsee-Tauchboot Limiting Factor in mehreren Tiefseegräben bis auf eine Tiefe von 10.928 m (s.u.). Alle elektrischen Verbraucher dieses Tauchfahrzeugs werden von einem Lithium-Eisenphosphat-Akku mit einer Gesamtkapazität von 65 kWh gespeist.
Das vierte Tauchfahrzeug, das in 10.909 m Tiefe den Grund des Challengertiefs erreicht, ist im November 2020 das bemannte chinesische Tauchgerät Fendouzhe. Der aus einer neu entwickelten Titanlegierung bestehende Druckkörper bietet neben der technischen Ausrüstung Platz für drei Personen.
In diesem Zusammenhang sollen hier als weiterer Schwerpunkt die Unterwasserfahrzeuge behandelt werden, die bei den unterschiedlichsten ozeanischen Aufgaben eingesetzt werden, wenn auch nicht in solchen Tiefen wie der Nereus. Dazu gehören die zumeist elektrisch betriebenen ferngesteuerten und/oder autonomen Tauchboote, die aufgrund ihrer torpedoähnlichen Form als Glider bezeichnet werden, sowie bemannte und unbemannte U-Boote.
Bei der Recherche ließen sich über die in früheren Jahresübersichten aufgeführten Modelle hinaus noch mehrere Nennungen aus dem Jahr 2013 finden, die hier vorab vorgestellt werden. Zudem soll ein kurzer Rückblick die Anfänge dieser Entwicklungen aufzeigen.
So wird im Januar 2013 berichtet, daß Wissenschaftler
der o.e. Woods
Hole Oceanographic Institution (WHOI) ab November des Vorjahres
zur Erkennung gefährdeter Wale mehrere Wochen lang zwei autonome Meeresroboter
nutzten, die mit Instrumenten ausgestattet sind, welche die Rufe von
Bartenwalen hören. Die vor der Küste von Maine, dem vermuteten Brutgebiet
der vom Aussterben bedrohten Nordatlantischen Glattwale, als Echtzeit-Walortungssystem
eingesetzten Glider sollen indirekt die Schiffe in diesem Gebiet warnen,
damit sie nicht mit den Meeressäugern zusammenstoßen.

der WHOI
Die beiden torpedoförmigen Meeresroboter, die unter der Leitung von Mark Baumgartner und Dave Fratantoni eingesetzt werden, sind etwa 1,8 m lang und mit einem Unterwassermikrofon, einem digitalen akustischen Überwachungsinstrument und einer speziellen Software ausgestattet, die es ihnen ermöglicht, die Rufe von vier Bartenwalen - Seiwal, Finnwal, Buckelwal und Glattwal - zu erkennen, zu klassifizieren und zu zählen. Die Gleiter tauchen alle zwei Stunden auf, um ihre GPS-Position zu bestimmen und die Daten über ihre Iridium-Satellitenantennen an die Küste zu übertragen.
Die Gleiter, die von Ozeanographen seit etwa zehn Jahren eingesetzt werden, können sich sägezahnförmig auf und ab und seitlich durch das Wasser bewegen, indem sie ihren Auftrieb mittels eines Ballastpumpen-Systems verändern und auch ihre kurzen Flügel zum Auftrieb nutzen. Dabei wird Wasser mit dem Volumen von etwa einer Tasse in die Nase gepumpt, woraufhin sich diese senkt.
Aufgrund des ungleichen Auftriebs entlang des Rumpfes und der Wirkung der beiden feststehenden Flügel kommt der Gleiter beim ,Abwärtsfliegen’ in der Wassersäule vorwärts. Um aufzusteigen, wird das Wasser aus der Nase hinausgepumpt, die dann nach oben schwebt und den Rest des Flugzeugs mit sich zieht.
Die Gleiter sind außerdem batteriebetrieben, sehr leise und bilden eine kostengünstige und weniger arbeitsintensive Alternative zu den derzeitigen Methoden zum Erkennen von Walen, die auf menschliche Beobachter per Schiff oder Flugzeug angewiesen sind.

Glider
Bei diesen Tauchrobotern handelt es sich um Slocum Glider der Firma Teledyne Webb Research (TWR), die auch für militärische und kommerzielle Zwecke eingesetzt werden. Sie sind in erster Linie für Langzeitbeobachtungen, Kartierungen und akustische Überwachung entwickelt und für lange Missionen in der Tiefsee und im offenen Meer optimiert.
An dieser Stelle ist ein kurzer Rückblick sinnvoll: Die ursprüngliche Firma Teledyne wurde 1960 von Henry Singleton und George Kozmetsky mit dem Ziel gegründet, die frühe Halbleitertechnologie und die digitale Information zu nutzen, um innovative Produkte und Lösungen zu entwickeln. Zwei Jahre später, 1962, gründete der Wissenschaftler und Erfinder Sam Raymond die Firma Benthos Inc., zu deren Höhepunkten die Einführung des MiniROVER im Jahr 1983 gehört, einem kostengünstigen Unterwasserfahrzeug (ROV), das die maritime Industrie revolutionierte und zu einem der meistverkauften ROV-Systeme wurde. Über diese Art kleine, meist ferngesteuerte Rover wird noch ausführlich in einer späteren Übersicht gesprochen.
Das Ingenieurbüro Webb Research Corp. wurde wiederum 1982 von dem ehemaligen WHOI-Forscher Douglas Webb gegründet, der mit seinem Slocum-Gleiter ein autonomes Unterwasserfahrzeug erfand, das in Verbindung mit Flügeln kleine Änderungen des Auftriebs nutzt, um über längere Zeiträume auf einer vorprogrammierten Route zu operieren und Umweltdaten zu sammeln. Benannt ist der Gleiter vermutlich nach Henry Warner Slocum, einem nordstaatlichen General im amerikanischen Bürgerkrieg.
1996 wurde die Teledyne von Allegheny Technologies übernommen, aber schon 1999 wieder als eigenständiges Unternehmen ausgegliedert - während Benthos in diesem Jahr durch die Übernahme der Datasonics Inc. expandierte, einem Hersteller von Kartierungs-Sonargeräten und akustischen Modems für die drahtlose Datenübertragung unter Wasser. Im Jahr 2006 wird das kombinierte Unternehmen dann von der Teledyne Technologies Inc. übernommen und unter dem Namen Teledyne Benthos bekannt, als strategische Geschäftseinheit der Teledyne Marine. Im Juli 2008 folgt dann die Akquisition der Webb Research.
Zu den besonderen Erfolgen der Slocum-Gleiter gehört, daß ein 2,36 m langes Exemplar namens Scarlet Knight (o. RU-27), benannt nach den Leichtathletikmannschaften der Rutgers University in New Jersey, zwischen Ende April und Anfang Dezember 2009 im Laufe von 221 Tagen als erstes autonomes Fahrzeug den Atlantik von New Jersey an der US-Ostküste bis nach Spanien überquert. Der Vorgänger RU-17 war auf einer ähnlichen Reise verschwunden, als es vor den Azoren mit etwas unter Wasser kollidierte, was ein Notauftauchen auslöste. Das Leck war jedoch zu groß und der Gleiter ging verloren - wahrscheinlich von einem Hai ,getötet’.
Hierzu paßt, daß der Biologe Chris Lowe von der California State University in Long Beach und der Ingenieur Chris Clark vom Harvey Mudd College in Claremont von 2010 bis 2013 einen Slocum-Glider nutzen, der speziell Haie aufspürt, um mehr über die Gewohnheiten der Fische zu erfahren. Das Team fängt hierzu einen Hai, bringt einen Sender an der Rückenflosse an und setzt ihn wieder aus. Das AUV folgt dem Hai dann mit einer Geschwindigkeit von bis zu 3 km/h in einem Abstand von 300 - 500 m, um das Tier nicht zu erschrecken.
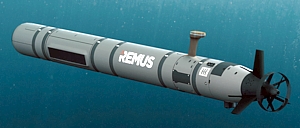
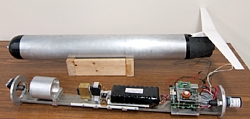
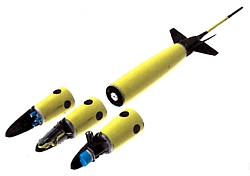
Ihre technischen Wurzeln haben die Gleiter in dem REMUS M3V (Micro 300 Meter Rated Vehicle), das mit einer Länge von 91,5 cm und einem Durchmesser von 12,4 cm dem Sonobuoy-Format entspricht, einer aus der Luft abwerfbaren akustischen Boje, die zur U-Boot-Erkennung und Unterwasserüberwachung eingesetzt wird. Das REMUS M3V kann bis zu 300 m tauchen und erreicht Geschwindigkeiten bis 10 Knoten. Das Kürzel REMUS steht dabei für ,Remote Environmental Measuring Units’.

Die Entwicklung, die Anfang der 2000er Jahre durch das WHOI in Zusammenarbeit mit der US-Firma Hydroid Inc. erfolgt, umfaßt zudem den kompakten, leichten und autonomen REMUS 100, der speziell für den Einsatz in küstennahen Gewässern mit Tiefen bis zu 100 m konzipiert ist. Er ist ca. 1,9 m lang, hat eine Durchmesser von 19 cm und ist für eine Einsatzdauer bis zu 30 Stunden geeignet, bei einer Reichweite von ca. 165 km.
Die in Pocasset, Massachusetts, beheimatete Hydroid Inc. wird im Jahr 2001 von den Erfindern des AUV als WHOI-Ausgründung geschaffen und startet 2003 die Serienfertigung des REMUS 100. Zu dieser Zeit beginnt mit Unterstützung des Office of Naval Research (ONR) auch die Entwicklung des REMUS 600, um die Anforderungen der US Navy für längere Einsätze mit größerer Nutzlast und größerer Tauchtiefe zu erfüllen (s.u.).
Auf dem REMUS 100 basiert auch das AUV MK 18 Mod 1 Swordfish für Minenabwehr und hydrografische Vermessungen, das erstmals während des Irak-Kriegs im Jahr 2003 von der US Navy für eingesetzt wurde und die Häfen von Umm Qasr und Al-Zubayr räumte. Die volle ,operationelle Einsatzfähigkeit’ dieses Modells wird 2008 erreicht - und 2016 führt ein REMUS-Gleiter den ersten operativen Einsatz von einem U-Boot aus durch.

(neue Version)
Im Jahr 2007 wird die Hydroid von dem norwegischen Unternehmen Kongsberg Maritime für etwa 80 Mio. $ übernommen. Bis 2011 produziert die Hydroid über 200 Exemplare des REMUS 100, die unter anderem an nationale Marineverbände wie die Schwedische Marine ausgeliefert werden. Die US Navy alleine hatte schon 150 Stück bestellt. Das 2 m lange und 45 kg schwere AUV kann acht Stunden lang autonom arbeiten und verfügt u.a. über sechs GoPro-Videokameras, die ein 360°-Sichtfeld bieten.
Mehrere autonome AUVs, darunter einige von Hydroid, erstellen im Juli 2010 im Nordatlantik 3D-Karten der Titanic - und im April 2011 ortet ein REMUS 6000 das Wrack des zwei Jahre zuvor abgestürzten Air-France-Flugs 447 in etwa 4.000 m Tiefe. Im Februar 2012 kommt die verbesserte Version REMUS 100-S auf den Markt.
Im Mai nimmt ein REMUS 100 zusammen mit dem deutschen Minenjäger Rottweill erfolgreich an der Operation Open Spirit teil, bei der in estnischen Gewässern 15 Minen aus dem Zweiten Weltkrieg beseitigt wurden. Und im Oktober bestellt das Bundesamt für Wehrtechnik und Beschaffung (BWB) sechs REMUS 100, die die deutsche Marine bei der Minenabwehr in sehr flachem Wasser unterstützen sollen. 2013 kauft auch die polnische Marine zwei REMUS 100, die zum Schutz der Marinestützpunkte in Gdynia und Swinoujscie eingesetzt werden sollen. Ähnliche Verträge folgen mit anderen Ländern.

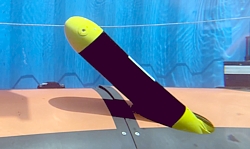
SharkCam
Um das Jahr 2011 herum wird zudem das schnelle, mit Antriebsschrauben versehene REMUS SharkCam AUV entwickelt, das mit Videokamera und wissenschaftlichen Instrumenten ausgerüstet ist, um marine Tiere wie den Weißhai zu verfolgen und zu filmen. Das Fahrzeug ist für kürzere, gezielte Missionen ausgelegt und vorprogrammiert, um dem Signal von einem am Tier befestigten Transponder bis in eine Tiefe von 100 m zu folgen.
Die ersten Beobachtungen finden im November 2013 vor der mexikanischen Insel Guadalupe statt und umfassen die Markierung und Verfolgung von vier Haien, bei der über 13 Stunden Videomaterial aufgezeichnet werden. Zusätzlich zu den markierten Haien kann die SharkCam auch 30 Interaktionen mit zehn einzelnen Haien dokumentieren, die von einfachen Annäherungen bis zum Anstoßen des Fahrzeugs und in neun Fällen zu aggressiven Bissen reichen, mit klar sichtbaren Spuren. Zum Tracking von Schildkröten wird später auch ein ähnliches REMUS TurtleCam AUV entwickelt, das nach seinem Einsatz allerdings keine Bißspuren aufweist.
Im Februar 2016 veröffentlichen der Meereswissenschaftler Mark A. Moline von der University of Delaware und seine Kollegin Kelly Benoit-Bird von der Oregon State University die im Netz einsehbare Studie ,Sensor Fusion and Autonomy as a Powerful Combination for Biological Assessment in the Marine Environment’, in welcher sie über die Ergebnisse ihrer 2013 begonnenen Untersuchungen berichten, ob Kalmare, Fische und Krill in einen Tiefseegraben auf den Bahamas Wale anlocken. Für ihre Arbeit verwendeten die Forscher ein REMUS 600 AUV.

Dieses speziell für längere Missionen mit erhöhter Nutzlast und größerer Tauchtiefe entwickelte Modell hat eine Länge von 3,25 bis 3,6 m und einen Durchmesser von 32,4 cm bei einem Gewicht von 240 - 250 kg. Die maximale Tauchtiefe beträgt 600 m, die Geschwindigkeit 4,5 - 5 Knoten. Der 5,2 kWh (andere Quellen: 11 kWh) Lithium-Ionen-Akku ermöglicht es dem unbemannten Unterwasserfahrzeug (UUV), mit einer Ladung bis zu 70 Stunden lang zu operieren.
Im vorliegenden Fall wird das Unterwasserfahrzeug so programmiert, daß es auf der Grundlage von Daten mehrerer Sensoren in Echtzeit autonome Entscheidungen treffen und neue Missionen starten kann, anstatt wie üblich nur Daten zu sammeln, die dann an Land analysiert und interpretiert werden, um dem Roboter schließlich neue Anweisungen zu geben. Die Forscher sind überzeugt, daß AUVs mit größerer Autonomie helfen werden, mehr Geheimnisse der Tiefsee zu entschlüsseln.
Ebenfalls im Jahr 2016 führt Hydroid eine neue Generation des REMUS 100 AUV ein, die über einen Zeitraum von zwei Jahren entwickelt wurde und die Zuverlässigkeit des ursprünglichen AUV mit neuen Merkmalen und Fähigkeiten kombiniert, wie z.B. einer fortschrittlichen Kernelektronik, einer flexiblen Navigation und einer offenen Architekturplattform für erweiterte Autonomie.

Kingfish
Auf dem REMUS 600 basieren auch Unterwasserfahrzeuge vom Typ MK 18 Mod 2 Kingfish, die für die Suche, Klassifizierung und Kartierung in sehr flachen Gewässern konzipiert sind. Diese größere und leistungsfähigere Version wurde explizit entwickelt, um Reichweite, Nutzlast und Sensorleistung weiter zu erhöhen, und kann auch in größeren Tiefen sowie in anspruchsvolleren Umgebungen eingesetzt werden. Die US-Marine, die über 24 Swordfish verfügt, hatte bereits im Juli 2012 die erste Welle davon in den Nahen Osten verlegt.
Im März 2020 verkauft Kongsberg Maritime die Hydroid für 350 Mio. $ an die Huntington Ingalls Industries (HII, früher: The Columbia Group, TCG), den größten Schiffslieferanten der US-Marine. Gleichzeitig wird eine strategische Allianz zwischen Kongsberg Maritime und HII zur technologischen Zusammenarbeit und gemeinsamen Vermarktung im Bereich Unterwassertechnologie und maritime Lösungen vereinbart.

Hydroid wird nun Teil des HII-Geschäftsbereichs Technical Solutions Unmanned Systems, zu dem unbemannte Unterwasserfahrzeuge wie die erstmals 2016 öffentlich präsentierte Proteus gehören, ein 7,8 m langes Dual-Mode-UUV für bemannten oder unbemannten autonomen Betrieb, das eine Nutzlast von 1.630 kg befördern kann und gemeinsam mit Battelle und Bluefin Robotics entwickelt wurde.
Die Proteus ist als Ersatz für das Mark 8 SEAL Delivery Vehicle (SDV) gedacht, das seit 1983 in verschiedenen Konfigurationen für solche Art Missionen eingesetzt wird. Dieses 15,4 Tonnen schwere, 6,7 m lange und 1,8 m breite Mini-U-Boot wird mit Strom aus Silber-Zink-Batterien versorgt, die einen Elektromotor mit Einwellenpropeller antreiben. Eine Weiterentwicklung namens Mark 9 ist mehr für den Angriff auf Überwasserschiffe konzipiert.
Die Proteus wiegt hingegen nur etwas mehr als 3,5 Tonnen und kann sechs bis sieben voll ausgerüstete Froschmänner 560 - 1.120 km weit an ihr Ziel bringen, je nach den verwendeten Batterien. Sie erreicht eine Höchstgeschwindigkeit von 10 Knoten, eine Reisegeschwindigkeit von 8 Knoten und ist mit einem Mehrstrahl-Sonar zur Vermeidung von Unfällen und zur Navigation ausgestattet. Die maximale unbemannte Tauchtiefe beträgt 60 m bzw. 45 m mit Tauchern an Bord.
Das kleine U-Boot wurde im September 2012 erstmals zu Wasser gelassen und anschließend von der Marine geleast, um Nutzlastentwicklungsprogramme zu unterstützen. Mit einem 148 kWh Lithium-Polymer-Akku, der auf 296 kWh erweiterbar ist, lassen sich Missionen mit einer Dauer von über zehn Stunden realisieren. Der Preis wird je nach Ausstattung mit 10 - 12 Mio. $ angegeben.
In Zusammenarbeit mit Boeing wird zudem das extragroße UUV Orca hergestellt, ein autonomes Unterwasserfahrzeug mit einer Länge von 16 m bzw. 26 m mit Zusatz-Payload-Modul, das einen Diesel/Batterien-Hybridantrieb besitzt und eine Reichweite von etwa 10.500 km hat. Der erste Prototyp wird im Dezember 2023 an die US Navy übergeben, die den Erwerb von insgesamt neun Exemplaren plant. Das ca. 85 Tonnen schwere Gerät hat eine typische Marschgeschwindigkeit von ca. 3 Knoten (5,6 km/h), während die Maximalgeschwindigkeit 8 Knoten (15 km/h) beträgt.
Als Einsatzzwecke werden Minenbekämpfung, Überwachung, elektronische Kriegsführung, Anti-U-Boot- und Anti-Oberflächen-Kriegsführung sowie der Einsatz als ,Mutterschiff’ für kleinere Drohnen genannt. Mit der Übernahme von Hydroid verfügt HII nun auch über die passenden Produkte im Bereich der mittleren und kleinen UUVs, wie die REMUS-AUVs, Seaglider und Meeresroboter.
Bereits im April 2021 wird das Modell REMUS 300 kommerziell eingeführt, dessen erster Prototyp schon im Februar des Vorjahres an die US Navy geliefert worden war. Es baut auf dem REMUS 100 auf, bietet verbesserte Modularität, eine Tauchtiefe von über 300 m und eine Einsatzdauer von bis zu 30 Stunden. Dem folgt im November 2022 die Version REMUS 620, die bis 8 Knoten schnell ist, bis zu 110 Stunden in Betrieb bleiben kann und eine Einsatzreichweite von über 500 km aufweist.

Weitere Ausführungen sind das REMUS 3000, das bis 1.500 m tief tauchen kann und mit 3 - 3,5 Knoten bis zu 20 Stunden unterwegs ist - sowie das REMUS 6000, das auf eine Tiefe von 6.000 m kommt, eine Geschwindigkeit von 5 Knoten erreicht und eine Einsatzzeit von bis zu 22 Stunden hat.
Dem aktuellen Stand zufolge werden die REMUS-AUVs in drei Fahrzeugklassen angeboten, basierend auf den Tiefenklassen von 100 m, 600 - 1.500 m und 6.000 m. Die Preise liegen bei 100.000 - 150.000 $ pro Stück.
Nicht belegen ließ sich bisher die etwa 2024/2025 erfolgte Übernahme der Hydroid durch die eingangs erwähnte Firma Teledyne Webb Research (TWR) - ebenso wie die Teledyne Marine eine Tochtergesellschaft der Teledyne Technologies -, die auf drei Bereiche spezialisiert ist: neutral schwimmende, autonome APEX-Drifter (bisher 10.000 Stück), autonome Slocum-Unterwassergleiter (bisher 1.100) sowie verankerte Unterwasserschallquellen. Die APEX-Schwimmer sind frei treibende Profilierungsschwimmer, die hauptsächlich zur Messung von Temperatur und Salzgehalt in den oberen 2.000 m des Ozeans eingesetzt werden.

Die Teledyne Marine bietet zudem das modulare Osprey AUV für Tauchtiefen bis 1.000 m (andere Quelle: 2.000 m) und mit einer erweiterten Ausdaueroption von mehr als 24 Stunden an, das 5 m lang ist, 400 kg wiegt, eine Maximalgeschwindigkeit von 5 Knoten erreicht und auf dem ebenfalls modularen Design des Gavia AUV basiert.
Bei diesem handelt es sich um ein autonomes Unterwasserfahrzeug der Firma Teledyne Gavia mit Hauptsitz in Kópavogur, Island, die ursprünglich 1999 und in Zusammenarbeit mit der Universität Island als Hafmynd ehf. entstanden ist und 2010 von Teledyne Technologies übernommen wurde.
Neben dem Hauptprodukt Gavia, einem 1,8 – 4,5 m langen, 50 – 130 kg schweren AUV für Tiefen bis zu 1.000 m, hatte das Unternehmen auch das hochseetaugliche AUV SeaRaptor entwickelt, das für Langzeit-Tiefseeoperationen bis in 3.000 - 6.000 m Wassertiefe geeignet ist. Dieses 5,5 m lange AUV ist standardmäßig mit einer 13 kWh Wechselbatterie ausgestattet, die auf 16 kWh erweitert werden kann, und erreicht eine Dauerleistung von 24 Stunden bei 3 Knoten.
Im Februar 2023 kündigt die TWR einen Slocum Sentinel Glider an, der seine offizielle Marktpremiere auf der Messe Oceanology International in London im März 2024 hat. Die neue Variante baut auf der bisherigen Slocum-Gleiter-Architektur auf, bietet aber eine Ausdauer von über zwei Jahren, mehr Nutzlastoptionen und deutlich verbesserte Energie- und Sensorkapazitäten.

des Redwing
Im Rahmen eines Projekts, das von Ingenieuren der Teledyne Marine und der Rutgers University initiiert wird, soll der Redwing - der fortschrittlichste kommerzielle Gleiter, der bislang gebaut wurde - als erster Unterwasserroboter die Welt umrunden.
Das Gefährt, das im Oktober 2025 vor der Küste von Martha’s Vineyard im US-Bundesstaat Massachusetts zu seiner über 70.000 km langen Reise startet, besitzt einen Rumpf aus kohlefaserverstärktem Kunststoff und einen extrem energiesparenden Antrieb. Dieser verändert den Auftrieb des Gleiters, indem er Luft im Inneren komprimiert oder aus dem Druckspeicher entläßt. Dies verändert das spezifische Gewicht, so daß der Gleiter entweder sinkt oder steigt. Sein Schwerpunkt ist dabei so ausbalanciert, daß er stets geneigt ist und sich vorwärts bewegt.
Während seiner Fahrt mißt der Gleiter die Wassertemperatur, den Salzgehalt und andere Indikatoren. Er kann Fische orten und ist mit einem Anstandsmesser ausgestattet, um nicht mit Hindernissen zu kollidieren. Im Notfall wird ein kleiner Propeller zugeschaltet, der die Manövrierfähigkeit kurzzeitig verbessert. Die Mission ist auf fünf Jahre angelegt - und auf der Hälfte der Strecke soll der Redwing geborgen und mit einer neuen Batterie ausgestattet werden.
Was die o.e. Firma Bluefin Robotics anbelangt, so wurde diese 1997 von den MIT-Ingenieuren James Bellingham und Frank van Mierlo gegründet. Das Robotikunternehmen mit Hauptsitz in Quincy, Massachusetts, ist auf die Entwicklung und Herstellung von militärischen und zivilen autonomen Unterwasserfahrzeugen (AUVs) und die dazugehörige Technologie spezialisiert - wofür es in den Folgejahren auch verschiedene Auszeichnungen erhält.

Zu den Produkten der Firma, die seit 2005 eine hundertprozentige Tochtergesellschaft des Battelle Memorial Institute ist, gehören der 4,93 m lange Unterwasser-Suchroboter Bluefin-21 mit einem Durchmesser von 53,3 cm - sowie sein militärisches Derivat, das 6,7 m lange Minensuch-AUV Knifefish, das erstmals 2012 vorgestellt wird, bevor es die US Navy 2017 in Dienst nimmt.
Der torpedoförmige Bluefin-21 wird international bekannt, als die Firma Phoenix International im April 2014 ein Exemplar mit dem Namen Artemis bei der Suche nach dem Malaysia-Airlines-Flug MH370 am Grund des Indischen Ozeans einsetzt - wenn auch erfolglos.
Der Gleiter hat austauschbare Nutzlast- und Batteriekomponenten und sein modulares Design kann so angepaßt werden, daß er eine Vielzahl von Sensoren und Nutzlasten tragen kann. Angetrieben wird der Bluefin-21 von neun Lithium-Polymer-Batterien mit einer Leistung von jeweils 1,5 kWh. Damit erreicht er eine Höchstgeschwindigkeit von 4,5 Knoten (8,3 km/h) und eine Ausdauer von 25 Stunden bei 3 Knoten (5,5 km/h). Die maximale Tauchtiefe beträgt 4.500 m.
Zeitgleich im April 2014 erhält die Bluefin Robotics einen Vertrag in Höhe von 7,11 Mio. $ vom Office of Naval Research (ONR) der US Navy für die Entwicklung des experimentellen Black Pearl AUV - und wird im Februar 2016 für einen ungenannten Betrag von der General Dynamics Mission Systems übernommen, wo sie Teil des Geschäftsbereichs Maritime und strategische Systeme wird.
Dem Stand von 2025 zufolge bietet die Firma drei UUV-Modelle an: den 1,75 m langen Bluefin-9, der erstmals auf der Konferenz und Ausstellung Oceans 2018 der Öffentlichkeit vorgestellt wurde, ein 1,5 kWh Akkupack besitzt und von zwei Personen getragen werden kann; den Bluefin-12 mit großer Nutzlastbucht; sowie den obigen Bluefin-21. Weitere Produkte sind das autonome Mikro-AUV SandShark, das weniger als 7 kg wiegt, sowie ein ebenfalls tragbarer Rover HAUV, der für die Inspektion von Schiffsrümpfen konzipiert ist. Wobei HAUV auch das Kürzel von Hovering Autonomous Underwater Vehicle ist.

des Towfish
In Bezug auf die erwähnte Fahndung nach dem seit März 2014 verschwundenen Flugzeug MH370 ist im Januar 2016 zu erfahren, daß nun auch ein Unterwasser-Sonargerät verloren gegangen sei, das Wrackteile auf dem Grund des Ozeans orten sollte. Dem australischen Joint Agency Coordination Centre (JACC) zufolge ist das Mini-U-Boot Towfish (SL Hydrospheric SLH-ProSAS-60), das mit einem mehrere Tausend Meter langen Kabel hinter einem Schiff hergezogen wird, mit einem Schlammvulkan kollidiert, der 2.200 m vom Meeresboden aufragt. Daraufhin sei das Kabel gebrochen.
Das Gerät sinkt samt 4.500 m Kabel auf dem Meeresgrund, kann etwa eine Woche später aber wiedergefunden wurden.
Ein zweiter Towfish geht im April durch das Versagen einer Schleppkabelverbindung verloren. Um ihn zu suchen, wird das ferngesteuerte Tauchfahrzeug Remora III aus den USA eingeflogen, dem es gelingt, das Gerät in einer Tiefe von mehr als 3.600 m treibend wieder aufzuspüren, woraufhin dessen Bergung durchgeführt wird. Eine Spur des abgestürzten Flugzeugs MH370 wird hingegen noch immer nicht gefunden.
Im gleichen Kontext: Im Februar 2025 startet die Spezialfirma Ocean Infinity mit Sitz in den USA und Großbritannien ihre bereits zweite Suche nach dem Flug MH370 mit Hilfe ihrer AUVs, muß die Operation im Indischen Ozean wegen schlechter Wetterbedingungen jedoch im April einstellen. Sie will die Arbeit aber Ende des Jahres wieder aufnehmen. Auch die erste Suche im Jahr 2018 war erfolglos geblieben.
Zu diesem im Juli 2017 gegründeten Unternehmen ist anzumerken, daß es direkt nach seiner Gründung das Forschungsschiff Seabed Constructor mietete und sich fortan auf den Einsatz von AUVs und ferngesteuerten Rovern zur Suche, Vermessung und Datensammlung auf Meerestiefen von bis zu 6.000 m spezialisierte. Erfolge bilden der Fund des argentinischen U-Boots ARA San Juan im November 2018, die anschließende Suche und Bergung des südkoreanischen Frachters Stellar Daisy im Südatlantik und die 2019 erfolgte Lokalisierung des französischen U-Boots Minerve nach 50 Jahren, um nur einige Beispiele zu nennen.
Im September 2023 schließt die Ocean Infinity einen Vertrag mit der Equinor Wind US LLC, um mit mehreren AUVs gleichzeitig eine umfassende Standortuntersuchung von Equinors Offshore-Windpachtgebiet OCS-P 0563 durchzuführen, wo der erste schwimmende Offshore-Windpark an der US-Westküste errichtet werden soll. Das Bureau of Ocean Energy Management (BOEM) hatte im Vorjahr fünf Pachtverträge für die kommerzielle Entwicklung der Offshore-Windenergie angeboten, von denen sich Equinor mit einem Gebot von 130 Mio. $ einen Pachtvertrag über rund 324 Mio. m2 im Gebiet der Morro Bay im Pazifischen Ozean sicherte, der ein Potential von rund 2 GW hat.

Die Flotte von Ocean Infinity mit weltweit verteilten unbemannten Schiffen und rund 20 AUVs, die als die „weltweit größte Flotte von voll funktionsfähigen autonomen Unterwasserfahrzeugen“ bezeichnet wird, bildet die ideale Voraussetzung, um das Wachstum der Offshore-Energie in den USA und weltweit zu unterstützen. Das Projekt für die Equinor soll im Februar 2024 anlaufen, um als Grundlage für den Standortbewertungsplan sowie den Bau- und Betriebsplan zu dienen.
Die Ocean Infinity besitzt eine Flotte von mindestens 15 HUGIN AUVs. Diese Carbon-Monocoque-Tauchgeräte sind etwa 6,2 m lang, haben einen Durchmesser von ca. 0,88 m, wiegen 1.850 kg, erreichen Geschwindigkeiten von 2 – 6 Knoten und eine Einsatzdauer von 60 – 100 Stunden. Darüber hinaus betreibt die Firma eine Armada genannte Flotte von mehr als 30 unbemannten und teilweise bemannten Schiffen von 8 - 86 m Länge, die für den Einsatz der AUVs, ROVs und anderer seegestützter Technologien ausgelegt sind.
Die von Kongsberg Maritime (s.o.) in Kooperation mit der Königlichen Norwegischen Marine, dem norwegischen Institut für Verteidigungsforschung Forsvarets forskningsinstitutt (FFI) und weiteren Partnern ab 1991 entwickelten AUVs der HUGIN-Serie gelten als die weltweit kommerziell erfolgreichsten AUVs. Der erste kommerzielle Einsatz fand 1997 statt. Die Modelle reichen von der HUGIN 1000 Serie bis zur HUGIN 6000 Serie, wobei die Ziffer der jeweils erreichbaren Wassertiefe entspricht.
Im März 2022 kommt das weniger als 4 m lange und etwa 300 kg schwere HUGIN Edge hinzu, das mit der neuesten Batterietechnologie ausgestattet ist, die einen Betrieb von mehr als 24 Stunden in Tiefen von bis zu 1.000 m ermöglicht. Zu den weiteren Unterwasserfahrzeugen des Unternehmens gehören das AUV HUGIN Endurance, dessen Einsatzdauer ca. 15 Tage beträgt, sowie das 66 m lange HUGIN Superior AUV, das mit seinem 62,5 kWh Lithium-Polymer-Akku eine Betriebszeit von 72 Stunden bei 3 Knoten hat.
Nun weiter mit den anderen Unterwasserfahrzeugen, die 2013 bekannt
werden, wie beispielsweise das 2 Mio. $ teure persönliche U-Boot Orcasub für
zwei Personen, das von dem britischen Kaufhaus Harrods im
März bei seiner Veranstaltung Technology Showcase 2.0 präsentiert
wird - allerdings nur als Miniatur, die hier abgebildet ist. Anderen
Quellen zufolge wird das Orcasub erstmals auf der London
Boat Show im Januar 2014 vorgestellt.

(Modell)
Das 6,4 m lange, 1,5 m hohe und mit Flügeln 4,25 m breite Orcasub, für das die herstellende kanadische Firma Nuytco Research Ltd. aus North Vancouver bereits Bestellungen für Ausgaben in voller Größe entgegennimmt, basiert auf den Prinzipien des Fliegens und nutzt Schub, Auftrieb und Widerstand, was sich auch in dem Design widerspiegelt. Dank seiner elektrischen Schubdüsen kann das U-Boot etwa 30 km weit mit einer Geschwindigkeit von 3 - 4 Knoten fahren, die Höchstgeschwindigkeit beträgt 6 Knoten.
Das mit Lithium-Ionen-Batterien betriebene, 4 Tonnen schwere U-Boot mit Stahlrumpf wird mit zwei Fußpedalen und einem Joystick gesteuert und ist mit einem Sonar zur Kollisionsvermeidung, einem digitalen Langstreckenkommunikationssystem und einer LED-Beleuchtungsanlage mit 60.000 Lumen ausgestattet. Während des Tauchvorgangs bis in 300 m Tiefe bieten zwei Glaskapseln einen 360°-Ausblick sowie jedem Insassen eine Lebenserhaltungskapazität von 80 Stunden - so lange reicht der interne Akku.
Wer noch tiefer tauchen möchte, kann ein Modell mit Titanrumpf bestellen, mit dem man auf bis zu 1.800 m (andere Quellen: 2.000 m) Tiefe kommt - das dann aber auch 9,32 Mio. $ kostet (andere Quellen: 10,8 Mio. $). Es läßt sich allerdings nichts darüber finden, daß es bislang zu einer Realisierung des U-Boots gekommen ist.
Das von Phil Nuytten gegründete Unternehmen hat im Laufe der Jahre aber schon erfolgreich diverse bemannte Unterwasserfahrzeuge entwickelt und hergestellt, wie beispielsweise den Dual Deepworker, den Carasub oder den Aquarius. Zudem bereitet es die Auslieferung seiner ersten Serie von Exosuits vor - Ganzkörper-Unterwasseranzügen, die es dem Benutzer ermöglichen, auf dem Meeresboden in 300 m Tiefe herumzulaufen.

(Grafik)
Im August 2013 erscheint ein weiteres persönliches U-Boot in den Blogs, das sogar für fünf Personen geeignet ist und ab 2016 betriebsbereit sein soll. Das als „einziges privates bemanntes Tiefseetauchboot, das für Verträge zur Verfügung steht“ beworbene Gefährt trägt den Namen Cyclops, was sich durch seine 180°-Kuppel aus Borosilikatglas erklärt, die wie ein einzelnes großes Auge aussieht.
Die Cyclops wird von dem Tauchboothersteller OceanGate Inc. entwickelt, wobei die Technologie- und Designforschung im Rahmen einer Partnerschaft mit Boeing Research & Technology und der University of Washington erfolgt.
Der 18 cm dicke Rumpf besteht aus Kohlenstoffasern, wobei einzelne Streifen vorimprägnierter Fasern einzeln in die Kohlenstoffasermatrix eingebracht sind. Diese von Boeing entwickelte Technik bietet eine bessere Produktionskontrolle als das herkömmliche Wickeln von Fasern und soll es dem U-Boot ermöglichen, dem Wasserdruck bei seiner maximalen Tauchtiefe von 3.000 m problemlos standzuhalten. Die Verwendung von Karbonfasern trägt auch dazu bei, das Gewicht zu reduzieren. Und die bordeigenen Lebenserhaltungssysteme ermöglichen Tauchzeiten von bis zu acht Stunden.

im MOHAI
Auch hier soll kurz der Hintergrund beleuchtet werden: Die OceanGate mit Sitz in Everett, Washington, wurde 2009 von Stockton Rush und Guillermo Söhnlein gegründet, erwarb das ursprünglich 1973 von der Perry Submarine Co. gebaute und später umgerüstete Unterseeboot Antipodes (PC-1501, XPC15), das für fünf Personen ausgelegt ist, und konstruierte in den 2010er Jahren zwei eigene, die Cyclops 1 und die Titan (ursprünglich Cyclops 2).
Im August 2018 bietet die Firma die Antipodes zum Verkauf an - und beginnt im Jahr 2021 damit, in der Titan zahlende Touristen zum Wrack der 1912 gesunkenen Titanic zu bringen, wobei der Preis für die Teilnahme 250.000 $ pro Person beträgt. Während einer Fahrt im Juni 2023 implodiert das U-Boot, wobei alle fünf Personen an Bord ums Leben kommen. Die Sache ist in der Presse ausführlich behandelt worden, so daß sich eine Wiederholung an dieser Stelle erübrigt.
Als die US-Verkehrssicherheitsbehörde NTSB mehr als zwei Jahre nach dem tödlichen Unfall ihren Untersuchungsbericht vorlegt, wird als Ursache für das Unglück mangelhafte Ingenieursarbeit genannt, die zur Konstruktion eines Druckbehälters aus Kohlefaserverbundwerkstoff geführt habe, der zahlreiche Anomalien aufwies und nicht die erforderlichen Festigkeits- und Haltbarkeitsanforderungen erfüllte. Zudem hätte OceanGate das Tauchboot im Vorfeld nicht ausreichend getestet.
Die OceanGate stellt im Juli 2023 alle Erkundungs- und kommerziellen Aktivitäten ein und wird abgewickelt. Das verbliebene Tauchboot Cyclops 1 ist im Museum für Geschichte und Industrie (MOHAI) in Seattle ausgestellt.

mit ROUGHIEs
Bei den Glidern geht es im Juni 2014 mit einem Bericht über die Professorin Nina Mahmoudian an der Michigan Technological University (Michigan Tech) weiter, eine Luft- und Raumfahrtingenieurin, die sich mit der Entwicklung von Unterwasserfahrzeugen befaßt und vom Office of Naval Research (ONR) mit einem Zuschuß von 125.000 $ für den Bau von vier kostengünstigen, aber besonderen Unterwassergleitern unterstützt wird.
Die derzeit eingesetzten AUVs verbringen viel Zeit damit, Unmengen von Daten über Dinge zu sammeln, bei denen es sich nicht um ein vermißtes Flugzeug handelt, wie bei o.e. der Suche nach dem Malaysia-Airlines-Flug MH370, bei der sogar eine mit der besten Technologie ausgestattete Unterwasserdrohne des o.g. Typs Bluefin-21 erfolglos blieb. Davon ausgehend will Mahmoudian autonome Fahrzeuge entwickeln, die in die Tiefe gehen und ein Gebiet mit einem ,Gefühl’ für das, was sie suchen sollen, erkunden - also intelligente Geräte, die selbständig Entscheidungen treffen können.
Die Unterwassergleiter von Mahmoudian mit dem Namen ROUGHIEs (Research Oriented Underwater Gliders for Hands-on Investigative Engineering) werden daher leistungsfähige Prozessoren und eine überarbeitete Software besitzen, damit sie ,wissen’, wonach sie suchen. Zudem sind die ROUGHIEs modular aufgebaut, so daß die Benutzer je nach den Aufgaben, die die Drohnen übernehmen, verschiedene Komponenten austauschen können. Und sie sollen nur einen Bruchteil des Preises kommerzieller Modelle kosten.
Angetrieben werden sie aber genauso nur durch Batterien und indem sie Wasser in einen integrierten Ballasttank hinein- oder herauspumpen, um ihren Auftrieb und ihr Gewicht anzupassen und langsam durch das Wasser zu fliegen. Das macht sie sicherer und zuverlässiger in flachen Gewässern, wo sich ein Propeller in der Vegetation verheddern oder eine Person verletzen könnte. Dies ist im Fall der ROUGHIEs besonders wichtig, da sie nicht mitten im Ozean unterwegs sein werden, sondern für den Einsatz in der Nähe der Wasserkante gedacht sind.

Ein wichtiger Aspekt der Forschung besteht darin, herauszufinden, wie man sie im Dauerbetrieb halten kann, damit sie nicht immer wieder zu einem Schiff zurückkehren müssen, um ihre Batterie aufzuladen.
Mahmoudians Labor hat auch einen Unterwassergleiter für die Lehre entwickelt, der GUPPIE heißt, wie ein schlanker Aquarienfisch aussieht und nur etwa 1.000 $ kostet, während ein ROUGHIE mit 10.000 $ zu Buche schlägt. Für den GUPPIE gibt es auch Lehr- und Bauanleitungen.
Für ihre Arbeit erhält die Wissenschaftlerin im Jahr 2015 zwei renommierte Auszeichnungen für junge Fakultätsmitglieder von der National Science Foundation (NSF) und dem ONR. Details über ihre Projekte finden sich auf der Website des Nina Mahmoudian Lab an der Purdue University in Indiana, wo sie seit Anfang 2019 lehrt und forscht.
Im Juli 2020 veröffentlichen Mahmoudian und ihre Kollegen der Purdue University und der Michigan Technological University die Studie ,Collaborative Mission Planning for Long-Term Operation Considering Energy Limitations’, in welcher sie über ihre Entwicklung einer (noch recht improvisiert aussehenden) mobilen Dockingstation berichten, an der Unterwasserroboter zum Aufladen anhalten und gleichzeitig ihre Daten übertragen können. Dadurch können sie ohne menschliches Zutun über weitaus längere Zeiträume hinweg eingesetzt werden.

Es wurden bereits mobile Ladestationen für Drohnen entwickelt, die die Reichweite der Unterwasserroboter erheblich vergrößern könnten, doch können sich diese nicht auf Kommunikationssignale wie GPS oder Funk verlassen, sobald sie unter die Oberfläche getaucht sind. Das bedeutet, daß sie in der Regel einem vorprogrammierten Pfad folgen und an die Oberfläche zurückkehren, sobald der Akku leer ist, wo menschliche Betreuer ihre Daten abrufen und die Batterien wieder aufladen. Dies ist aber sehr teuer und schränkt die Zeit ein, in der die Roboter ihre Aufgaben erfüllen können.
Die neue Lösung basiert daher auf einem Algorithmus, der den Weg des Roboters während der Mission umleitet und es ihm ermöglicht, an das Oberflächenfahrzeug anzudocken, sobald es erforderlich ist, die Batterien aufzuladen und/oder Daten zu übermitteln. Der Algorithmus ist auch in der Lage, in Echtzeit umzuplanen, so daß sich der Roboter an veränderte Bedingungen oder Störungen anpassen kann.
Der vorgeschlagene Ansatz wird in mehreren Simulationsszenarien validiert, und auch kurze Feldversuche im Lake Superior mit einem autonomen Unterwasserfahrzeug und einem Überwasserfahrzeug bestätigen die Umsetzbarkeit. Da sich der Ansatz auch als eine effiziente Lösung erweist, um den Energieverbrauch beim Betrieb von Multi-Roboter-Netzwerken zu minimieren, hofft das Team, in Zukunft Übungen mit neuen Versionen und mehreren mobilen Andockstellen gleichzeitig durchführen zu können.
Ebenfalls im Juni 2014 schließen
Forscher der Universität
Tianjin den Seetest eines autonomen Unterwasserfahrzeugs
namens Haiyan ab, einer zivilen Plattform,
die für wissenschaftliche Erkundungen der Meeresbiologie und des
Meeresbodens sowie zur Unterstützung von Such- und Rettungsmissionen
eingesetzt werden soll.
Als autonomes UUV mit einer Ausdauer von 30 Tagen und einer Reichweite von 1.000 km ist das Haiyan in der Lage, eigenständig und ohne menschliches Eingreifen zu operieren, was es ideal für langwierige und/oder gefährliche Missionen wie Minensuchen und U-Boot-Aufspüren macht. Zudem ist es kleiner und mit nur 70 kg auch wesentlich leichter als frühere chinesische UUVs der Zhi-Shui-Serie, die 2.000 kg gewogen haben. Deren Entwicklung begann 1989 und sie wurden 1994 in Dienst genommen. Mehr darüber findet sich in dem im Netz einsehbaren Artikel ,An Overview of Submersible Research and Development in China’, der im Januar 2019 erscheint.
Die bessere Leistung des Haiyan im Vergleich zu älteren UUV ist darauf zurückzuführen, daß es sich um ein Unterwassergleitfahrzeug handelt, das mit Hilfe von Flügeln und geringen Änderungen des Auftriebs vertikale Bewegungen in horizontale Bewegungen umwandelt. Dies führt zwar zu einer langsamen, aber energieeffizienten Geschwindigkeit von 4 Knoten, die die Ausdauer verbessert. Außerdem verfügt der neue Gleiter über eine fortschrittlichere Datenverarbeitung.
Ein weiterer chinesischer Gleiter trägt den Namen Sea Wing. Dieser wurde vom Institut für Ozeanologie der Chinesischen Akademie der Wissenschaften entwickelt. Der Unterwassergleiter, der sich mit Hilfe eines mit Öl gefüllten Auftriebsausgleichssystems durch das Wasser bewegt, wird für ozeanografische Forschungen eingesetzt und verfügt über Sensoren zur Messung der Meerwasser-Temperatur, des Salzgehalts, der Trübung, des Chlorophyllgehalts, des Sauerstoffgehalts und der Veränderungen der Meeresströmungen.
Im Jahr 2014 absolviert ein Sea Wing einen 30-tägigen Test im Südchinesischen Meer mit einer Gesamtfahrtlänge von über 1.022 km. Im Folgejahr werden die Glider im ostchinesischen Meer, im südchinesischen Meer und in anderen Gewässern des westlichen Pazifiks eingesetzt, um Beobachtungen von Ozeanphänomenen wie Wirbeln und Grenzströmung durchzuführen.
Im März 2015 erscheint erstmals eine Unterwasser-Superyacht in der Presse, die den offenbar nicht geschützten Namen Yellow Submarine (o. Teardrop Y.Co Yellow Submarine bzw. VAS 525/60 LE MK2) trägt. Das 8,4 m lange, 2,6 m hohe und 24 m breite U-Boot hat einen Aluminiumrumpf und kann vier bis fünf Passagiere aufnehmen.

Submarine
Das von Y.CO - einem Full-Service-Unternehmen für Superyachten mit Hauptsitz in Monte Carlo - für Abenteuer konzipierte vollelektrische Mini-U-Boot ist von der italienischen Firma GSE Trieste srl (Giunio Santi Engineering) nach militärischen Standards gebaut worden, die seit 1991 im Markt für kleine Unterwasserfahrzeuge aktiv ist. Dem Unternehmen zufolge ist die Yellow Submarine nach den Standards des italienischen Klassifizierungsregisters RINA geprüft und zugelassen worden, nachdem das bemannte Tauchboot auf See gründlich getestet wurde, einschließlich der maximalen Tauchtiefe von 160 m.
Das Yellow Submarine wird von einem langsam drehenden 5-Blatt-Bronzepropeller mit 950 mm Durchmesser in einer Kortdüse angetrieben, den ein 16 kW Elektromotor speist, der eine Höchstgeschwindigkeit von 6 Knoten erlaubt. Außerdem ist das U-Boot mit vier vektoriellen Kreuzstrahlern ausgestattet - zwei für horizontale Manöver und zwei für die Tiefenhaltung und vertikale Manöver. Darüber hinaus verfügt es über zwei 900-Liter-Ballasttanks, Antikollisionssonar, Side-Scan-Sonar und zwei 2,3-Liter-CO2-Wäscher. Informationen über die Batteriekapazität ließen sich nicht finden.
Die Ladekapazität beträgt 500 kg, und der Sauerstoffvorrat reicht für eine 8-stündige Mission. Allerdings gibt es Reservesauerstoff für 96 Stunden für eine vollständige Besatzung. Über die AeroMarine Rentals ist das Yellow Submarine für privaten Charter oder Kauf verfügbar.
Mit dem Ziel, bis 2018 innovative Meeresforschungstechnologien für Langzeitmissionen in großen Tiefen bereitzustellen, startet im Mai 2015 das von der EU mit 8 Mio. € finanzierte Gemeinschaftsprojekt BRIDGES, was für ,Bringing together Research and Industry for the Development of Glider Environmental Services’ steht, an dem 19 europäische Partner teilnehmen.
(Montage)
Diese eint die Einsicht, daß die Tiefsee die neue Grenze für Bergbau, Ölförderung und andere industrielle Aktivitäten ist, die sich weg von den Kontinentalsockeln in Gebiete kilometerweit unter der Meeresoberfläche verlagern. Damit gehen größere Gefahren für die Umwelt einher, die eine ständige Überwachung erfordern. Um die notwendigen ,Augen’ zu liefern, werden das britische National Oceanography Centre (NOC) und seine Partner nun eine neue Generation von Tiefsee-Glidern entwickeln.
Auf der Grundlage des Gleiters SeaExplorer des französischen Unternehmens ALSEAMAR sollen im Rahmen von BRIDGES und in Zusammenarbeit mit einem breiten Spektrum von Branchen und Experten zwei Prototypen gebaut und getestet werden, die in der Lage sind, als Europas erste Ultra-Tiefsee-Robotergleiter in den Weltmeeren bis in eine Tiefe von 5.000 m vorzustoßen und dort bis zu drei Monate lang autonom zu operieren. Der letzte Test der BRIDGE-Glider ist für September 2019 vor der Südostküste Irlands geplant.
Die BRIDGES-Glider werden eine modulare Nutzlastarchitektur verwenden, d.h., die Bugspitze und andere Komponenten können je nach den Erfordernissen der jeweiligen Mission leicht ausgetauscht werden. Im Rahmen des Projekts werden so auch neue Sensoren, Betriebsmethoden, Datenverwaltungs-, Kommunikations- und Steuersysteme entwickelt, die die Glider robust, wirtschaftlich und einfach einsetzbar machen sollen. Sie werden auch eine besondere Fähigkeit zur Überwachung von Sedimentfahnen haben, die durch den Bergbau entstehen und erhebliche Auswirkungen auf marine Ökosysteme haben können.

Die ALSEAMAR mit Sitz in Aix-en-Provence wurde Anfang der 2010er Jahre als Teil der Alcen-Gruppe gegründet und geht auf eine Zusammenführung maritimer Fachteile von Apex Technologies und der ECA Group zurück. Die Firma entwickelt und fertigt Systeme für die Unterwasserrobotik, Akustik, hydrografische Anwendungen und U-Boot-Kommunikation, wie z.B. die ferngesteuerten Unterwasserfahrzeuge SEAScan und Alister.
Der SeaExplorer wird 2015 auf den Markt gebracht. Auch er arbeitet ohne Propellerantrieb und nutzt das hydrodynamische Prinzip, bei dem er durch Änderung seines Auftriebs und einer Verschiebung des Schwerpunkts im Wasser auf- und abgleitet. Spätere Folgeprodukte sind der SeaExplorer X2 und schließlich der SeaExplorer 1000, der mit einem Antriebspropeller ausgestattet ist, eine Tiefe bis 1.000 m erreicht und bis zu 125 Tage lang im Dauerbetrieb aktiv sein kann.
Parallel dazu arbeitet das NOC ab 2015 gemeinsam mit dem Unterwasserfahrzeughersteller Planet Ocean Ltd. und der Firma ASV Ltd. unter der Leitung der University of Southampton an der Entwicklung von Mikro-U-Booten, die nur etwa ein Drittel so groß sind wie die meisten herkömmlichen AUVs. Das britische Konsortium stellt im Dezember 2016 zwei Exemplare vor, die so einfach und kompakt sind, daß sie ohne menschliche Hilfe von robotischen Oberflächenschiffen aus gestartet werden können. Die vollständige Produkteinführung findet auf der Ocean Business im April 2017 in Southampton statt.

und ecoSUBm
Das etwa 50 cm (andere Quellen: ca. 75 cm) lange und 4 kg schwere ecoSUBμ sowie das ecoSUBm mit einer Länge von rund 100 cm und einem Gewicht von 12 kg haben eine Laufzeit von sechs bzw. zehn Stunden und können einzeln für Anwendungen wie die Inspektion von Unterwasserpipelines eingesetzt werden, aber die mit Sensoren ausgestatteten Microsubs sollen besonders nützlich sein, wenn sie in Gruppen ausgesandt werden. Solche Schwärme sind in der Lage, gemeinsam hochauflösende 3D-Karten zu erstellen, die vollständiger sind als die von einzelnen AUVs erstellten. Zudem können Microsub-Schwärme in Verbindung mit Überwasserfahrzeugen oder Satelliten größere Gebiete in kürzerer Zeit abdecken.
Ab 2022 folgen dann die weiterentwickelten Mark 5-Versionen ecoSUBµ5, ecoSUBm5 und ecoSUBm25, die in mehreren Punkten verbessert wurden, wie z.B. bei Energieeffizienz und Tauchtiefe. Das ,µ’ steht dabei weiterhin für micro AUVs, während das ,m’ midsize AUVs meint. Die Herstellung erfolgt durch die ebenfalls in Southampton beheimatete ecoSUB Robotics Ltd., eine operative Abteilung der Planet Ocean.
Die ecoSUB stellt im August 2022 den Einsatz eines Mikro-AUV vor, der gemeinsam mit der kanadischen Firma Cellula Robotics Ltd. im Rahmen des Pilotprojekts SeaWolf AUV des australischen Militärunternehmens Trusted Autonomous Systems (TAS) vorbereitet wurde und dabei helfen soll, die Anwesenheit eines größeren AUV zu verbergen, das beispielsweise auf einem Überwachungseinsatz ist.
des Mikro-AUV
Denn obwohl einige AUVs tagelang tief unter Wasser fahren können, müssen sie doch immer wieder auftauchen, um ihre gesammelten Daten zu übermitteln - da sich Funkwellen nicht gut durch das Wasser bewegen. Doch solange das Fahrzeug an der Oberfläche schwimmt, kann es von den Personen entdeckt werden, die es ausspionieren soll.
Die Royal Australian Navy (RAN) hatte das Unterwasserprojekt ,Loyal Wingman’ im Mai öffentlich vorgestellt, nachdem dieses Ende des Vorjahres gestartet war, als eines von drei laufenden Programmen zur Entwicklung australischer AUV-Fähigkeiten. Im Rahmen des SeaWolf-Pilotprojekts soll bis Anfang 2023 ein AUV mit einer Länge von 12 m entwickelt werden. Neben Cellula Robotics und der TAS sind noch die Firmen Mission Systems, Ocean Wave Consulting und East Consulting Services beteiligt.
Derweil befindet sich die Cellula Robotics in der Endphase der Gründung eines in Australien ansässigen Unternehmens, um die nächsten Phasen dieses Projekts, einschließlich der Fertigung in Australien, voranzutreiben.
Für den Test des neuen Systems, der im Juli 2022 in der Bucht von Indian Arm in der Stadt Vancouver durchgeführt wurde, war auf bzw. in einem speziell ausgerüsteten Solus LR AUV von Cellula Robotics ein Mikro-AUV vom Typ ecoSUBµ5 installiert worden. Dieses hat eine Länge von 66 cm (mit Antenne 92,5 cm), einen Durchmesser von 11,1 cm und ein Gewicht von 4 kg. Es ist standardmäßig mit Alkali-Batterien ausgestattet, wobei die genaue Kapazität nicht angegeben wird. Das AUV besitzt einen elektrischen Direktantrieb mit Propeller, die Tauchtiefe beträgt bis zu 500 m, die maximale Geschwindigkeit 1 m/s und die Reichweite bis zu 40 km bei einer maximalen Einsatzdauer von zwölf Stunden.

Im Gegensatz dazu kann das 8,5 m lange Solus LR mit einem Durchmesser von 1 m, das von Wasserstoff-Brennstoffzellen betrieben wird, bis in eine Tiefe von 3.000 m abtauchen, sich mit einer Höchstgeschwindigkeit von 2 m/s fortbewegen und eine Strecke von bis zu 2.000 km zurücklegen, ohne aufzutanken.
Bei dem Test setzte das Solus LR sein Mikro-AUV aus, während es untergetaucht war, doch anstatt wie eine Boje direkt an die Oberfläche zu steigen, bewegte sich das Mikro-AUV unter Wasser mehrere Kilometer weit weg, bevor es auftauchte und über Iridium-Satellitenkommunikation eine Statusmeldung an ein externes Kommandozentrum übermittelte.
Da es so viel kleiner ist als sein Wirtsfahrzeug, ist es viel unwahrscheinlicher, daß es entdeckt wird. Aber selbst wenn es gesehen wird, verrät seine Oberflächenposition nicht die aktuelle Unterwasserposition der Solus-LR. Außerdem sinkt es nach der Übertragung einfach auf den Meeresgrund, so daß es nicht zu seinem Wirtsfahrzeug zurückverfolgt werden kann. Allerdings wird es dadurch zu einer Form von Meeresmüll, was nicht gerade die beste Lösung ist.
Zu den weiteren Produkten der Cellula Robotics gehören beispielsweise die extra-großen Langstrecken-AUVs Guardian (knapp 12 m lang, bis 5.000 km Reichweite, Einsatzdauer bis zu 45 Tage, kann kommerzielle Nutzlasten gezielt aussetzen), Porter (für wissenschaftliche und militärische Anwendungen), das AUV Envoy (für geophysikalische und hydrografische Vermessungen, auch mit Batterieantrieb, bis 2.000 km Reichweite), das schwebende AUV Subsea Warden (zur Messung von Schiffscharakteristiken, kann in Schwärmen autonom operieren) sowie kabellose Unterwassersensoren für die Umwelt- und Sicherheitsüberwachung.

von Anduril
Parallel zu dieser Entwicklung unterzeichnet die RAN im Mai 2022 einen Vertrag über 100 Mio. $ mit dem US-Militärdienstleister Anduril Industries, um während der dreijährigen Laufzeit des Programms drei Versionen eines extragroßen autonomen Unterwasserfahrzeugs (XL-AUV) namens Ghost Shark in Australien zu entwickeln und zu liefern. Das XL-AUV wird als erschwingliche, ausdauernde und multimissionsfähige Plattform angepriesen, die mit allen möglichen Ausrüstungen ausgestattet und für ein breites Spektrum an militärischen und nichtmilitärischen Missionen eingesetzt werden kann, wie z.B. Infrastrukturinspektion, Überwachung, Aufklärung und Zielerfassung.
Um die Kosten niedrig zu halten und den Zeitrahmen für alle drei Iterationen dieser Maschine, die die Größe eines Busses haben wird, auf drei Jahre zu begrenzen, wird Anduril auf die Druckhülle verzichten und das Wasser frei durch das Fahrzeug fließen lassen, das einen Rahmen aus Aluminium besitzt, der mit einer leichten Haut überzogen ist.
Die Naßhüllen-Konstruktion ist bei vielen Hobbybastlern gängig, sobald sie es mit größeren Maschinen zu tun haben, denn funkferngesteuerte U-Boote mit versiegeltem, wasserdichtem Äußeren sind zwar gut zum Arbeiten geeignet, weil man im Inneren viel Platz und einen leichten Zugang zu den Komponenten hat, doch es ist sehr mühsam, die Boote so abzudichten, daß sie dem Druck in der Tiefsee standhalten, und ebenso mühsam ist es, sie wieder zu öffnen, um daran zu arbeiten. Außerdem sind sie sehr schwer, da sie viel mehr festes Ballastgewicht tragen müssen, um gegen den Auftrieb der Luft anzukämpfen, die in ihnen eingeschlossen ist.
,Offene’ Konstruktionen hingegen lassen das Wasser einfach ungehindert ein- und ausströmen, sind daher einfacher und schneller zu bauen und auch wesentlich leichter, was das Aussetzen und Wiedereinholen erheblich vereinfacht. Die wichtigsten Systeme des XL-UAV, wie die empfindliche Elektronik sowie die druckfesten Akkupacks, sind in eigenen wasserdichten Druckbehältern in der Größe von Propangastanks untergebracht. Es ist viel billiger, mehrere kleine Druckkörper zu bauen als einen großen, und falls einer von ihnen ausfallen sollte, wird nur die Ausrüstung in dem betreffenden Modul beschädigt.

Zum jetzigen Zeitpunkt liegen noch keine genaueren Spezifikationen vor, aber das XL-UAV wird ein batteriebetriebenes Antriebssystem am Heck und ein Navigations- und Kontrollsystem im Bug haben, während alles dazwischen für die Nutzlast vorgesehen ist. Dabei können die mittleren Module je nach Bedarf unterschiedlich lang sein. Die Boote werden wahrscheinlich in der Lage sein, Operationen bis zu einer Tiefe von 6.000 m durchzuführen und über eine Woche lang autonom zu operieren, gesteuert von dem auf künstlicher Intelligenz basierenden, firmeneigenen Lattice-Betriebssystem.
Zur Umsetzung des ehrgeizigen XL-UAV-Programms, während dessen dreijährigen Laufzeit drei Prototypen an die RAN auszuliefern sind, wird Anduril die Technologie des amerikanischen AUV-Herstellers Dive Technologies Inc. nutzen, dessen 5,8 m langes, 1,2 m durchmessendes und 2,7 Tonnen schweres AUV Dive-LD - ein Large-Diameter Autonomous Undersea Vehicles (LD-AUV) - für mehrwöchige Einsätze in 6.000 m Tiefe ausgelegt ist und bis zu zehn Tage lang autonom operieren kann. Es wird mittels der großformatigen additiven Fertigung (LFAM) produziert.
Um Zugriff auf die Technologie zu erhalten, hatte die Anduril das erst 2018 gegründete Start-Up bereits im Februar 2022 für etwa 40 Mio. $ übernommen. Dieses stellt später mit dem Dive-XL auch eine kommerzielle XL-AUV Variante vor.
Im April 2024 stellen Anduril, die RAN und die Defence Science and Technology Group (DSTG) im Hafen von Sydney den ersten, mehr als 2 m hohen und 5,8 m langen Ghost Shark-Prototypen Alpha vor, womit das Programm, in welches 42 australische Zulieferunternehmen involviert sind, dem Zeitplan um ein Jahr voraus ist. Die DSTG bringt ihre eigenen Pfadfindungstechnologien ein und verfügt über Design- und Entwicklungskompetenzen für Schlüsselsysteme und Nutzlasten.

Alpha
Im August wird das zweite XL-AUV anläßlich der Übung Rim of the Pacific (RIMPAC) in der Nähe der Hawaii-Inseln mit einer C-17A der Royal Australian Air Force (RAAF) in die USA geflogen, wo es seine schnellen und wendigen Expeditionsfähigkeiten als modulare Mehrzweckwaffe für maritime Unterwassereinsätze unter Beweis stellt. Da sich der erste Ghost Shark in Australien befindet, ermöglicht dies gleichzeitige Tests auf beiden Seiten des Pazifiks.
Außerdem berichtet die Anduril, daß sie 60 Mio. $ in eine Arsenal-1 genannte, 5 Mio. m2 große, hochentwickelte und robotergestützte XL-AUV-Produktionsanlage in Australien investieren wird, die in der Lage sein wird, eine große Anzahl von Ghost Sharks sowie die kommerzielle Dive-XL-Variante herzustellen. Zudem wird die Eröffnung einer Produktionsstätte in Rhode Island in den USA angekündigt, um die dortige Produktion der Dive-LDs auf 200 Stück pro Jahr zu erhöhen.
Im April 2025 meldet Anduril die Markteinführung einer Familie von autonomen AUVs mit hoher Geschwindigkeit, die mit dem Dive-LD und dem Dive-XL ,kooperieren’. Die neue Copperhead-Serie umfaßt zwei Modelle - Copperhead-100 und Copperhead-500 - mit unterschiedlichen Größen, Nutzlastkapazitäten und Reichweiten für schnelle militärische sowie kommerzielle Einsätze wie Such- und Rettungsoperationen, Inspektionen kritischer Infrastrukturen und Umweltüberwachung. Sie erreichen Geschwindigkeiten von mehr als 30 Knoten.
Hinzu kommt die Munitionsvariante Copperhead-M mit torpedoähnlichen Fähigkeiten. Der Dive-XL kann beispielsweise Dutzende von Copperhead-100M oder mehrere Copperhead-500M mit sich führen und bei Bedarf eine hohe Unterwasser-Feuerkraft bereitstellen, um maritime Bedrohungen auszuschalten.
Bis September 2025 wird auch der dritte Ghost Shark fertiggestellt. Gleichzeitig gibt das australische Verteidigungsministerium bekannt, daß im Rahmen einer Investition von 1,1 Mrd. $ eine Flotte von Dutzenden Ghost Shark XL-AUVs beschafft und bereits ab Anfang 2026 in Dienst gestellt werden soll.
Die erst im Juni 2017 gegründete Anduril hatte übrigens 2019 auch mit der Entwicklung einer Methode zur Drohnenabwehr begonnen, die das US Special Operations Command 2022 im Rahmen eines Auftrags in Höhe von 1 Mrd. $ zum System seiner Wahl erklärte. Zudem hat die Firma großen Erfolg mit ihren vollautonomen Sensortürmen (Autonomous Surveillance Towers, AST) zur Grenzüberwachung.
Ein neuer Programmieransatz von Ingenieuren des MIT
um Prof. Brian Williams, über den im Mai 2015 berichtet
wird, verleiht Robotern mehr ,kognitive Fähigkeiten’, die es dem Menschen
ermöglichen, hochrangige Ziele festzulegen, während der Roboter hochrangige
Entscheidungen trifft, um herauszufinden, wie er diese Ziele am besten
erreichen kann.
Während einer Forschungsfahrt vor der Westküste Australiens im März hatten die MIT-Ingenieure zusammen mit Kollegen der Woods Hole Oceanographic Institution, des Australian Center for Field Robotics, der University of Rhode Island u.a. Partnern das autonome Missionsplanungssystem drei Wochen lang getestet. Mit einem autonomen Unterwassergleiter wird nachgewiesen, daß der Roboter in der Lage ist, sicher zwischen einer Reihe anderer autonomer Fahrzeuge zu operieren und gleichzeitig Befehle auf höherer Ebene zu empfangen.
Der Gleiter kann mit Hilfe des Systems seinen Missionsplan so anpassen, daß er anderen Fahrzeugen nicht in die Quere kommt, aber dennoch seine wichtigsten wissenschaftlichen Ziele erreicht. Wenn z.B. ein anderes Fahrzeug länger als erwartet braucht, um ein bestimmtes Gebiet zu erkunden, ändert der Gleiter seine Prioritäten und bleibt länger an seinem aktuellen Standort, um mögliche Kollisionen zu vermeiden.
Die Forschung wird zum Teil vom Schmidt Ocean Institute finanziert, während die zugrunde liegende Technologie teilweise von der Boeing Co., dem Keck Institute of Space Sciences, der Defense Advanced Research Projects Agency (DARPA) und der NASA unterstützt wird.
Im August 2015 starten Stéphane
Rousson und der Designer Minh-lôc
Truong auf Kickstarter eine Kampagne, um ihr neues
Ein-Piloten-U-Boot aus Kohlefaser an den Mann zu bringen. Dieses
hat einen Hintergrund, der bis 2010 zurückreicht,
als Rousson auf der Pariser Green
Air Show nicht nur seinen mit Helium gefüllten Segelballon Zeppy
3 vorstellte - dessen eigene, lange Geschichte im entsprechenden
Kapitelteil der Muskelkraft-Luftschiffe dokumentiert
ist -, sondern auch ein pedalbetriebenes persönliches U-Boot namens Scubster,
dessen Beschreibung sich unter Über-
und Unterwasser findet.

Scubster
Ab 2011 war dann gemeinsam mit Partnern der Nemo Scubster (o. E-Scubster) entwickelt worden, eine Version mit Elektroantrieb und einer Reichweite von zwei Stunden. Der leere Rumpf aus Kohlefaser hat ein Gewicht von nur 30 kg, dazu kommen zwei Motoren von jeweils 10 kg sowie zwei Akkupacks à 15 kg. Der derzeitige Prototyp hat auf jeder Seite einen Propeller, der über einen mit einer Stange verbundenen Hebel gesteuert wird und unabhängig voneinander gedreht werden kann. Dadurch soll das Boot sehr wendig sein, das mit einer Geschwindigkeit von bis zu 4 Knoten (8 km/h) unterwegs ist.
Nachdem das offene Modell, das mit einem erfahrenen Taucher am Steuer bis zu 60 m tief tauchen kann, im Juli erfolgreich getestet wurde, soll nun die Produktion und Vermarktung des Scubster angegangen werden. Der Plan mit der Crowdfunding-Kampagne, bei der ein Betrag von 15.000 € eingesammelt werden soll – so viel, wie der Bau des Bootes gegenwärtig kostet -, wobei das Geld zur weiteren Optimierung des Gefährts verwendet werden sollte, geht aber nicht auf, da nur sieben Personen gerade einmal 501 € beisteuern. Damit scheint das Projekt auch sein Ende gefunden zu haben, denn aus späterer Zeit läßt sich nicht mehr darüber finden.
Hinweis: Es ist wohl nicht verwunderlich, daß der Name Nemo - der des Kommandanten des U-Bootes Nautilus in Jules Vernes Werk 20.000 Meilen unter dem Meer - bei U-Booten und anderen Wasserfahrzeugen häufiger vorkommt. Auch die dänische Firma U-Boat Worx B.V. nennt eines ihrer elektrisch betriebenen U-Boote NEMO. Diese äußerst aktive und erfolgreiche Firma wurde bereits ausführlich in der Jahresübersicht 2010 vorgestellt (s.d.).
Im Juli 2015 wird erstmals das von der US Navy in Auftrag gegebene und von Boeing gebaute autonome U-Boot Echo Seeker öffentlich vorgestellt, das bis zu drei Tage am Stück unter Wasser bleiben kann. Es ist der kleinere Bruder des Echo Ranger AUV aus dem Jahr 2001, der u.a. bei der Entdeckung von Schiffswracks vor der kalifornischen Küste eingesetzt wurde.

Seeker
Der Echo Seeker ist etwa 9,8 m lang und wird von Silber-Zink-Batterien angetrieben, die ihm eine Reichweite von 426 km bei einer Betriebsgeschwindigkeit von 5,6 km/h erlauben. Das U-Boot kann bis zu einer Tiefe von 6.100 m abtauchen und dabei eine Nutzlast von 2.700 kg mit sich führen. Bei seinem Einsatz arbeitet der Echo Seeker weitgehend autonom, wobei die Kommunikation mit der Oberfläche auf ein schwaches akustisches System beschränkt bleibt.
Unter Wasser navigiert er mit einem Sonarsystem, mit dem sich aus einer Höhe von 90 m ein 3,2 km breiter Streifen des Meeresbodens mit einer Auflösung von 10 cm kartieren läßt. Mit dieser Fähigkeit soll der Echo Seeker sowohl an staatliche als auch an kommerzielle Kunden für Öl- und Gasexplorationen, Umweltuntersuchungen, militärische Überwachung und mehr vermietet werden.
Noch wesentlich größer ist der Echo Voyager, den Boeing im März 2016 vorstellt. Das Fahrzeug, dessen Konstruktion bei den Boeing Phantom Works bereits 2011 begann, ist Teil des Programms eXtra Large Unmanned Undersea Vehicle (XLUUV) der Marine, das darauf abzielt, ein kostengünstiges, aber effektives Unterwasserrobotersystem zu entwickeln.
Von April bis Juni 2017 führt das 16 m lange autonome U-Boot eine Reihe von Oberflächenmanövern und flachen Tauchgängen vor der Küste Südkaliforniens durch, um die Kommunikation, Autonomie, den Antrieb, die Systemintegration und die Batteriesysteme zu testen, bevor es im Mai 2018 seine erste Langstreckenfahrt in tiefen Gewässern antritt.

Voyager
Im Gegensatz zu den meisten anderen unbemannten Unterwasserfahrzeugen, die zumeist ferngesteuert werden und zur Stromversorgung und Unterstützung in der Nähe ihrer Mutterschiffe bleiben müssen, kann der Echo Voyager sechs Monate selbständig auf See agieren, bis zu 3.400 m tief tauchen und dabei 12.100 km zurücklegen. Hierzu besitzt er in seiner 9,1 x 2,6 m großen Nutzlastbucht fortschrittliche autonome Computersysteme sowie ein hybrides Energiesystem.
Dieses besteht aus einem elektrischen Antrieb und einem Dieselgenerator. Sind die Akkus erschöpft, muß das U-Boot aber auftauchen, denn der zum Aufladen der Batterien dienende Verbrennungsmotor benötigt ja Luft. Der Elektroantrieb hat eine Leistung von etwa 18 kW und ermöglicht es dem Echo Voyager, mehrere Tage lang mit einer Geschwindigkeit von bis zu 7,8 Knoten unter Wasser zu fahren.
Für die weitere Entwicklung und Produktion von XLUUVs für die Marine geht Boeing eine Partnerschaft mit der oben erwähnten Firma Huntington Ingalls Industries (HII) ein, wobei das Schiff so konzipiert ist, daß es sowohl militärisch als auch kommerziell genutzt werden kann. Verkäufe an Interessenten aus dem letzteren Sektor lassen sich bislang aber nicht belegen.
Im Februar 2019 erhält Boeing von der US Navy einen Auftrag im Wert von 43 Mio. $ für vier Orca AUVs, die auf dem Design des Echo Voyager basieren (s.o.).
Nachtrag: Im Mai 2025 wird das robotische U-Boot unter dem Namen XV Excalibur in der Presse offiziell vorgestellt, als das erste XLUUV im Einsatz, das von der in Plymouth ansässigen Firma MSubs im Rahmen des zwischenzeitlich gestarteten Projekts Cetus gebaut worden war. Im August wird gemeldet, daß das 12 m lange und 2 m breite U-Boot erfolgreich in den Gewässern der Marinebasis Devonport in England patrouillierte, während es von einer 16.000 km entfernten Kommandozentrale in Australien gesteuert wurde.
Im Oktober folgen Berichte, denen zufolge die Royal Navy eine Quantenuhr in das U-Boot eingebaut habe, um eine präzise Unterwassernavigation über längere Zeiträume zu ermöglichen. Hierzu hatte die Marine mit Quantum Positioning and Timing (PNT) Systemen experimentiert, die auf der optischen Atomuhr Infleqtion Tiqker basieren.
Im Oktober 2015 stellt der kanadische Ingenieur und Angel-Investor Charles Bombardier das Konzept Dolfido vor, ein solarbetriebenes U-Boot, das für Taucher entwickelt wurde und dessen Form von den Omer-U-Booten mit Muskelkraftantrieb inspiriert ist, die ab 1990 an der École de Technologie Supérieure in Montréal gebaut wurden. Diese Entwicklung wird ausführlich im Kapitelteil Über- und Unterwasser beschrieben.
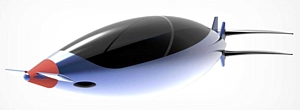
(Grafik)
Daß der Dolfido von Tauchern gefahren werden soll, bedeutet, daß das Fahrzeug mit Wasser geflutet wird, so daß man eine Tauchausrüstung tragen muß, um darin zu fahren. Dies erlaubt es jedoch, daß man jederzeit anhalten und das U-Boot verlassen kann, um herumzuschwimmen und sich etwas anzusehen. Außerdem ist es viel einfacher, ein solches Fahrzeug zu bauen als ein echtes, versiegeltes U-Boot.
Anstelle eines Propellers nutzt die Dolfido ein oszillierendes Antriebssystem mit zwei Schwänzen, die in entgegengesetzten Richtungen auf- und abschwingen, um das Boot schnell unter Wasser zu bewegen. Um diese Bewegung zu erreichen, hat der kanadische Ingenieur Brice Thouret einen einfachen Mechanismus konstruiert, wobei die Form der Schwänze je nach gewünschter Geschwindigkeit und Größe des U-Boots definiert wird. Eine Steuerung muß noch entwickelt werden.

(Grafik)
Um seine Batterien aufzuladen, wenn er am Dock oder am Strand geparkt ist, soll der Dolfido Solarenergie in Form eines Bimini-Daches oder einer Bootsabdeckung aus flexiblen Solarzellen nutzen. Für den Landstromanschluß gibt es ein eingebautes Ladegerät. Bombardier hofft, den Preis auf 3.999 $ senken zu können, um die U-Boote an Ferienanlagen und Sporttaucher zu verkaufen. Es läßt sich aber nichts darüber finden, daß das Konzept tatsächlich umgesetzt wurde.
Ein Jahr später, im September 2016, folgt mit der Yacht Seataci das gemeinsam mit dem spanischen Designer Martín Rico entwickelte Konzept eines Bootes, dessen Hauptrumpf unter Wasser abgesenkt wird, so daß die Passagiere einen Blick auf die Korallenriffe und das Meeresleben unter Wasser haben. Die Fähigkeit zum Untertauchen wird durch ein Wasserballastsystem ermöglicht, während die seitlichen Pods das Schiff stabilisieren. Zudem verfügt die Yacht über zwei Landeplätze, die speziell für persönliche Flugdrohnen konzipiert sind.

(Grafik)
Auch dieses ,halbe Tauchboot’ verwendet ein biomimetisches Antriebssystem, das die auf- und abgehende Schwingbewegung der Schwanzflosse eines Delphins nachahmt. Ab 2017 arbeiten Bombardier, Thouret und Rico gemeinsam daran, aus dem Antriebssystem einen Mekafin genannten elektrischen Außenbordmotor zu konstruieren. Dieser soll im Folgejahr in einer Pilotserie aus 50 Exemplaren das Licht der Welt erblicken.
Das erste marktfähige Gerät hat einen 500 W Motor und wird auch einigen Tests auf offenem Wasser unterzogen. Vom Aufbau her soll es sich für Elektromotoren bis 800 W eignen. Es läßt sich allerdings nichts darüber finden, daß die Entwicklung je über dieses erste Versuchsstadium hinausgekommen ist.
Bombardier, der 2013 mit der Veröffentlichung seiner Konzepte begann, veröffentlicht bis Februar 2019 über 325 Designs. Er wird uns besonders häufig bei den Elektro- und Solarfluggeräten begegnen, angefangen mit seiner Idee der Drohnenbalkone im Juni 2016, über das elektrische Flugauto-Konzept Dekatone im Februar und das Horus Hoverbike im Juli 2017, bis hin zu der Aufklärungsdrohne Whisper im Oktober 2018, der Drohne Feuxzy mit Schallfeuerlöscher im Januar 2019 und diversen weiteren Entwürfen - von denen bis auf den Mekafin-Antriebsprototyp bislang aber kein einziger umgesetzt wurde. Mit U-Booten scheint sich der Visionär gar nicht mehr zu beschäftigen.

(Grafik)
Mit dem Calypso präsentiert Sebastian Campos Möller, ein Industriedesigner aus Mexiko, der mit Bombardiers Designbüro zusammenarbeitet, im Oktober 2016 allerdings ein halbtauchfähiges Wassermotorrad, das als Rettungsfahrzeug für Surfer dienen soll, die sich von den Wellen haben hinausziehen lassen. Das Fahrzeug verwendet handelsübliche Sea-Doo-Teile in Verbindung mit einem neuartigen Rumpf aus kevlarverstärkten Fasern oder einem anderen leichten und starken Material.
Der Calypso funktioniert ähnlich wie ein PWC mit Strahlturbinenantrieb, nur daß das Fahrzeug länger ist und ein Cockpit mit einer starken Kappe hat, damit es unter riesigen Wellen hindurchtauchen kann. Der derzeitige Entwurf sieht seitliche Öffnungen aus Mesh-Gewebe und eine Windschutzscheibe vor, hinten gibt es eine Öffnung und einen Raum, in dem der Surfer sein Surfbrett befestigen kann.
Das Wassermotorrad könnte gewaltige Wellen bewältigen, und eine einzige Person wäre in der Lage, Rettungseinsätze an gefährlichen Küsten, in Brandungszonen und in der Nähe von Felsen durchzuführen, wo eine schnelle Reaktion entscheidend ist. Selbst wenn eine Reihe von Wellen das Fahrzeug immer wieder überrollen würde, bliebe der Fahrer in seinem Cockpit sicher.
Auch die Firma Lockheed Martin in Bethesda,
Maryland, beschäftigt sich mit der Entwicklung und dem Bau von AUVs.
Im Dezember 2015 berichtet
sie über ihre neueste Version, die 954 kg schwere Marlin MK3,
die eine Einsatztiefe von bis zu 4.000 m erreicht. Das autonome Vermessungs-
und Inspektions-Unterwasserfahrzeug wird von der Partnerfirma SeaRobotics
Corp. in Stuart, Florida, hergestellt und mit einer 44 kWh
Batterie ausgestattet, die eine Betriebsdauer von bis zu 24 Stunden
ermöglicht. Mit dieser Kapazität kann das AUV über 100 km weit fahren,
bevor es wieder aufgeladen werden muß.

Je nach den Anforderungen des Kunden kann die Marlin MK3 mit verschiedenen Sensoren ausgestattet werden, die ihr hochauflösende Videofunktionen, Standbilder, Laserprofiler und Sonare mit synthetischer Apertur verleihen. Sie ist zudem in der Lage, selbständig Daten zu sammeln, zu verarbeiten und zu analysieren.
Besonders interessant ist eine Meldung vom September 2016 mit der Überschrift: „Unbemanntes Boot bekommt unbemanntes U-Boot, um unbemanntes Flugzeug zu starten“. Demzufolge ist es Lockheed Martin bei einer dreitägigen Übung der US Navy in der Narragansett Bay in Rhode Island im Vormonat gelungen, ein unbemanntes Tauchboot einzusetzen, um von diesem aus ein unbemanntes Luftfahrzeug zu starten, während ein unbemanntes Überwasserfahrzeug für die Aufklärung und Überwachung der Oberfläche sorgte.

Die Übung begann damit, daß das Überwasserfahrzeug Submaran von Ocean Aero über eine akustische Unterwasserkommunikation Anweisungen von einer Bodenkontrollstation an das autonome Unterwasserfahrzeug Marlin MK2 weitergab, einen Vorläufer der MK3.
Auf diese Anweisung hin stieß die Marlin einen Kanister mit der neuen Vector Hawk-Flugdrohne von Lockheed Martin mit eingeklappten Flügeln ab. Bei Erreichen der Oberfläche öffnete sich der Behälter, die Drohne klappte ihre Flügel aus, hob ab und folgte einer vorgegebenen Flugbahn.
Das 4,14 m lange Submaran wird durch ein elektrisches Triebwerk und ein einziehbares Segel angetrieben und ist mit Solarzellen ausgestattet, die es ihm ermöglichen, monatelang in Betrieb zu bleiben.

Es kann mit einer Vielzahl von Sensoren für unterschiedliche Anwendungen ausgestattet werden und ist sogar in der Lage, unter die Wasseroberfläche zu tauchen. Mit solcherart autonomen Oberflächenbooten werden wir uns in einem späteren Schwerpunkt noch ausführlich befassen.
Was die 3 m lange, batteriebetriebene Marlin MK2 anbelangt, so kann diese bis auf 305 m sinken, bis zu 24 Stunden lang aktiv bleiben und eine maximale Nutzlast von 113 kg tragen. Der Vector Hawk hingegen kann mit einer Batterieladung über 70 Minuten in der Luft bleiben und hat eine Reichweite von bis zu 15 km. Er wird ausführlich in der Jahresübersicht 2014 im Kapitelteil der Elektro- und Solarfluggeräte behandelt.
Im Februar 2016 folgt ein Bericht über das autonome Unterwasserfahrzeug DEDAVE (Deep Diving AUV for Exploration), das vom deutschen Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung (IOSB) als das erste AUV der Welt konstruiert wurde, das von Anfang an, d.h. seit etwa 2011, mit Blick auf die Serienproduktion entwickelt worden ist und nun in großer Stückzahl hergestellt werden soll.

Das 3,5 m lange Gerät mit einem Gewicht von weniger als 700 kg kann den Meeresboden bis zu 6.000 m Tiefe erkunden, um dort etwa nach Ölquellen oder Mineralien zu suchen. Es wird mit acht, je 15 kg schweren auswechselbaren Batterien betrieben, wobei eine Ladung für bis zu 20 Stunden Fahrzeit reicht. Ein 1 m langer Laderaum ermöglicht die Installation mehrerer Sensoren, je nach Anwendungsfall. Vorteilhaft ist auch, daß vier Exemplare in einen einzigen Schiffscontainer passen.
Bereits im März 2017 kann ein kommerzieller Erfolg gemeldet werden, als das DEDAVE an das kanadische Unternehmen Kraken Sonar Inc. verkauft wird. Hinzu kommen ein exklusiver Lizenzvertrag für große Unterwasserfahrzeuge von über 750 kg Gewicht sowie ein fünfjähriger Forschungsvertrag, bei dem das IOSB die Firma bei der Entwicklung neuer Versionen des AUV unterstützen und beraten wird. Außerdem benennt die Firma das AUV in ThunderFish Alpha um.
Die Kraken Sonar hat sich in den vergangenen zwei Jahren als Weltmarktführer bei der Synthetic Aperture Sonar (SAS) Technologie ausgezeichnet, die die Meeresbodenuntersuchungen mittels hochauflösender Bilder drastisch verbessert. Mit involviert in die Entwicklung der Sensoren und Software für die nächste Generation intelligenter Unterwasserfahrzeuge ist die Kraken Robotik GmbH, ein 2016 in Bremen gegründetes Spin-off des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) und Tochterunternehmen der Kraken Sonar.

Alpha
Im Juli 2017 startet eine Initiative, um versunkene Flugmodelle des berühmten kanadischen Kampfflugzeugs Avro Arrow (o. Avro Canada CF-105 Arrow) zu finden, einem 24 m langen legendären Deltaflügler-Abfangjäger mit einer Spannweite von 15 m, der Mitte bis Ende der 1950er Jahre entwickelt wurde. Hierbei wurden zahlreiche Tests von einer Basis am Ufer des Ontariosees aus durchgeführt, bei denen Modelle des späteren Flugzeugs auf Trägerraketen befestigt und nach dem Start auf Überschallgeschwindigkeit beschleunigt wurden.
Das Projekt wurde allerdings 1959 aufgegeben und die Zerstörung aller sechs ganz oder fast fertiggestellten Jagdflugzeuge angeordnet. Von den zwischen 1954 und 1957 durchgeführten Versuchen mit acht (andere Quellen: neun) Testmodellen mit einer Länge von 3 m und einer Spannweite von 2 m existieren jedoch noch heute zahlreiche Fragmente, die über ein großes Gebiet auf dem Grund des Ontariosees verstreut sind und bei der kanadischen Bevölkerung immenses Interesse finden.
Bis Ende September 2017 gelingt es dem ,Raise the arrow’-Team der Kraken Sonar mit Hilfe des ThunderFish Alpha, zwei Modelle des Überschallflugzeugs erfolgreich aufzuspüren, nach denen bereits seit fünf Dekaden gesucht wird und die nun noch dieses Jahr geborgen werden sollen. Die witterungsbedingt eingestellte Suche soll von Juni bis September 2018 fortgesetzt werden. Alles in allem wird das Unterwasserfahrzeug dabei eine Fläche von 64 km2 scannen.
In Bezug auf das erwähnte Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI) in Bremen ist zu erwähnen, daß hier im Rahmen des Ende 2012 gestarteten Projekts Europa-Explorer (EurEx) und gefördert durch das Bundesministerium für Wirtschaft und Klimaschutz (BMWK) sowie das Deutsche Zentrum für Luft- und Raumfahrt (DLR) an einem Konzept gearbeitet wird, um den Jupitermond Europa durch AUVs zu erforschen. Unter seiner bis zu 15 km dicken Eisdecke wird ein tiefer Ozean vermutet, dessen hydrothermale Quellen die Grundlage für extraterrestrisches Leben bieten könnte.

Das hierfür gedachte AUV DeepLeng ist als Langstrecken-Explorationsfahrzeug konzipiert und seine Form speziell für die Anforderung im Europa-Explorer-Szenario angepaßt: Ein Durchmesser von nur 28 cm, um in einen Eisbohrer hineinzupassen, sowie eine 3 m lange hydrodynamische Strömungshülle, um mit wenig Energieaufwand lange Strecken zurücklegen zu können. Eine Nutzlastbucht ermöglicht die Ausstattung mit missionsspezifischen Sensoren. Die Stromversorgung besteht aus einem 1,6 kWh Lithium-Eisenphosphat-Akku, der eine Systembetriebsdauer von ca. zehn Stunden erlaubt. Die maximale Operationstiefe beträgt 2.000 m.
Um das AUV durch die Eisdecke zu bekommen, soll als thermaler Bohrmechanismus eine Roboter-Schmelzsonde namens IceShuttle Teredo mit einer Schmelzleistung von 3,6 kW zum Einsatz kommen, die darüber hinaus als ortsfeste Basisstation dient und sowohl unterstützende Sensorik zur Navigation des AUVs als auch eine Dockingschnittstelle zum Aufladen der Batterie zur Verfügung stellt. An den Methoden der Thermalbohrung arbeitet die Rheinisch-Westfälische Technische Hochschule Aachen (RWTH).
Das DeepLeng ist übrigens die zweite Iteration des Vorläufer-AUVs Leng, das mit einer Länge von ca. 3,5 m und einem Durchmesser von 22 cm durch einen 1,75 kWh Lithium-Polymer-Akku angetrieben wurde und eine Geschwindigkeit von ca. 6 Knoten erreichte.
Das Projekt EurEx läuft bis Ende April 2016 und zu seinen Folgeprojekten gehört das 2017 gestartete EurEx-LUNa (Europa-Explorer – Lunar Analog Mission), dessen Ziel die Weiterentwicklung der autonomen Unter-Eis-Navigation und -Exploration ist. In einem weiteren Projekt namens EurEx-SiLaNa (EurEx – Sichere Langzeitnavigation), das bis Ende 2019 läuft, wird die Navigation des Roboterteams, bestehend aus dem AUV und dem IceShuttle, verbessert.
Außerdem wird nun entschieden, statt Aluminium, Edelstahl und Titan Glasdruckkörper und Trennkörper aus Kunststoff einzusetzen, was Korrosionsschäden vollständig verhindert, die Materialkosten senkt und sogar ein tieferes Abtauchen ermöglicht. Zur Weiterführung plant das DFKI-Team um Prof. Frank Kirchner ein Folgeprojekt im Frühjahr 2020, in dessen Rahmen DeepLeng fertiggestellt und unter anderem im schwedischen Abisko unter Eis getestet werden soll, ebenso wie der Rover DAGON, der in einem späteren Schwerpunkt ausführlicher behandelt wird.
Im Vorfeld eines tatsächlichen AUV-Einsatzes auf Europa startet im Rahmen der NASA-Mission Europa Clipper Mitte Oktober 2024 eine Raumsonde mit einer SpaceX Falcon Heavy, die im April 2030 die Jupiter-Umlaufbahn erreichen und anschließend mehr als 40 Flybys des Jupitermondes absolvieren soll. Entsprechend den Ergebnissen dieser Mission könnte das DeepLeng dann frühestens in den 2040er Jahren vor Ort in Betrieb gehen.
Wie im Oktober 2015 zu erfahren ist, entwickelt auch
die NASA Miniatur-Unterwasser-Roboter, die darauf
ausgelegt sind, die verborgenen Ozeane auf den gefrorenen Monden wie
Europa von Jupiter und Enceladus von Saturn zu erforschen. Das mehrphasige
Projekt namens SWIM (Sensing With Independent Micro-swimmers)
geht aber nur sehr zögerlich voran.
Im Februar 2018 wird beispielsweise gemeldet, daß die Wissenschaftler des NASA Glenn Research Center gemeinsam mit Kollegen der Washington State University zwischenzeitlich einen außerirdischen Ozean aus flüssigem Methan und Ethan im Labor nachgebaut haben, um die Entwürfe der U-Boote zu testen, die eines Tages in das Original eintauchen sollen. Der entsprechende Bericht trägt den Titel ,Experimental PρT-x measurements of liquid methane-ethane-nitrogen mixtures’.
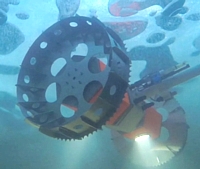
Im November 2019 wird dann ein BRUIE (Buoyant Rover for Under-Ice Exploration) genannter Roboter auf Rädern vorgestellt, den Ingenieure des Jet Propulsion Laboratory (JPL) der NASA entwickelt haben. Da die Erforschung der Eis-Wasser-Grenzfläche für die meisten Tauchfahrzeuge schwierig ist, da sie aufgrund der Meeresströmungen abstürzen können oder zu viel Energie für die Aufrechterhaltung ihrer Position verbrauchen, nutzt BRUIE den Auftrieb, um an der Unterseite des Eises verankert zu bleiben, und ist für die meisten Strömungen unempfindlich.
BRUIE sieht aus wie eine 90 cm breite Spule und beherbergt in seinem Schaft Elektronik, Kameras und Instrumente. Er hat zwei motorisierte Endräder mit scharfen Zähnen, um die Unterseite des glatten Eises zu greifen. Er kann zudem sicher abgeschaltet werden und schaltet sich nur ein, wenn eine Messung durchzuführen ist, so daß er monatelang die Umgebung unter dem Eis beobachten kann.
Für die ersten Tests, die im Dezember in der australischen Forschungsstation Casey in der Antarktis beginnen, wird der Forschungsroboter an einem Seil durch ein Loch im Eis hinabgelassen. Dort wird er dann seine Wanderungen beginnen, während seine Instrumente und zwei hochauflösende Live-Kameras Daten über gelösten Sauerstoff, den Salzgehalt des Wassers, Druck und Temperatur zurücksenden. Verlaufen die Tests erfolgreich, wird BRUIE nach einigen Monaten von der Leine genommen, um auch in größeren Tiefen zu operieren.

(Grafik)
Im Februar 2021 und 2022 folgen Berichte mit weiteren Details zum Projekt SWIM. Demnach hat die NASA im Rahmen der zahlreichen Missionskonzepte für den Zugang zu außerirdischen Ozeanen auch einen mit einer Nuklearbatterie ausgestatteten thermomechanischen Bohrroboter entwickelt, der den Namen SESAME trägt (Scientific Exploration Subsurface Access Mechanism for Europa). Die Mikroschwimmer sollen die Fähigkeiten von SESAME drastisch erweitern und die Wahrscheinlichkeit der Entdeckung von Lebensanzeichen deutlich erhöhen.
Das SWIM-System besteht aus etwa fünfzig 3D-gedruckten, keilförmigen schwimmenden Mikrorobotern mit einem Volumen von jeweils 60 – 75 cm3 (andere Quellen: 100 cm3) und einer Länge von 12 cm, die mit MEMS-Sensoren ausgestattet sind, von Miniaturaktuatoren angetrieben und drahtlos mit Ultraschallwellen gesteuert werden. Etwa vier Dutzend von ihnen passen in einen 10 cm langen Abschnitt eines Kryobots mit einem Durchmesser von 25 cm.
Die einzelnen Roboter sind so konzipiert, daß sie etwa zwei Stunden lang ununterbrochen in Meeresströmungen mit einer Geschwindigkeit von bis zu 1 m/s arbeiten können und eine Reichweite von mehr als 100 m vom Mutterschiff haben. Die Mikroschwimmer werden einzeln oder als Schwarm von dem SESAME-Roboter-Mutterschiff aus eingesetzt, das nur eine begrenzte Mobilität hat, sobald es die Schnittstelle zwischen Meer und Eis erreicht und sich dort verankert hat. SWIM ermöglicht dadurch die aktive Beprobung des Ozeanwassers sowie zeitlich und räumlich verteilte Messungen außerhalb der Reichweite des SESAME-Roboters.
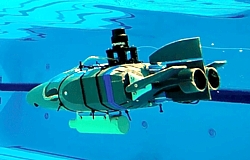
Als Nächstes ist die Durchführung einer Studie geplant, um die geeigneten Roboterdesigns und -größen zu bestimmen. Der Schwerpunkt liegt dabei auf der Miniaturisierung der wichtigsten Teilsysteme: wissenschaftliche Instrumente (Sensoren, Spektrometer, Kameras), Aktuatoren (Ultraschall, Piezoelektrik, Motoren), Kommunikation (Ultraschall) und Energieversorgung (Batterien, Energiewandler).
Erst im Juni 2022 wird gemeldet, daß die NASA im Rahmen des Programms NIAC (NASA Innovative Advanced Concepts) weitere Mittel für SWIM bereitgestellt hat. Das Team um den Konstrukteur Ethan Schaler vom JPL erhält nun 600.000 $, um die Entwicklung fortzusetzen und in den nächsten zwei Jahren Prototypen der Roboter zu bauen und zu testen. Für die erste Phase hatte es im Vorjahr 125.000 $ gegeben.
Tatsächlich erscheinen im November 2024 Fotos eines 42 cm langen und 2,3 kg schweren Prototypen, der seit September in einem Wettkampfschwimmbecken getestet wird, um die Machbarkeit von SWIM zu belegen, wobei die endgültige Version auf die Größe eines Smartphones reduziert werden soll. Bei den Tests operiert der Prototyp mit Propellern und Flossen autonom in dem 23 m langen Becken, während Computersimulationen die extremen Bedingungen auf Europa nachbilden.
In einem ähnlichen Kontext beginnt im Juni 2023 das Projekt TRIPLE-nanoAUV 2 als Teil der zweiten Phase der TRIPLE-Initiative, die vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) gefördert wird und als zentrale Aufgabe die Entwicklung und Erprobung eines vollautonomen Kleinst-Tauchroboters für die Erforschung von subglazialen Gewässern hat – vor allem in Hinblick auf zukünftige Raumfahrtmissionen zu den Eismonden Europa und Enceladus.

Das Gemeinschaftsprojekt wird vom MARUM (Zentrum für MARine UMweltwissenschaften) an der Universität Bremen koordiniert, wobei TRIPLE für ,Technologies for Rapid Ice Penetration and subglacial Lake Exploration’ steht. Beteiligte Partner sind insgesamt 13 Entwicklerteams aus Hochschulen, Forschungseinrichtungen und Industriepartnern aus ganz Deutschland.
Die erste Phase des TRIPLE-Projekts hatte im Jahr 2020 begonnen und konzentrierte sich auf die Entwicklung des ersten Prototyps eines kleinen autonomen Tauchroboters mit der Bezeichnung nanoAUV und die Integration der wichtigsten Technologien für den Einsatz unter subglazialen Eisschichten. Dazu gehörte in erster Linie die Integration eines Launch & Recovery Systems (LRS) in die Schmelzsonde zur Aussetzung und Bergung des nanoAUV.
Die IceCraft-1 Schmelzsonde war dann im Frühjahr 2023 in der Nähe der Neumayer III-Station in der Antarktis getestet worden, in Zusammenarbeit mit dem Alfred-Wegener-Institut (AWI) und dem Norwegischen Polarinstitut (NPI). Dabei durchdrang das LRS mit dem nanoAUV als Nutzlast das Ekström-Schelfeis auf etwa 100 m und setzte den Roboter im darunterliegenden Wasser aus.
Das torpedoförmige nanoAUV wird mit eingeklappten Flügeln etwa 50 cm lang und 10 cm breit sein. In dieser Konfiguration wird es sich seinen Weg durch das Eis bahnen, gekapselt in einer eisschmelzenden Sonde. Ihm folgt eine zylindrische Andockstation, die an eine Mondlandefähre auf der Oberfläche angebunden bleibt. Sobald das nanoAUV das Eis durchdrungen hat, wird es die Umgebung des Ozeans autonom erkunden und dabei Daten über Kameras und zahlreiche andere Sensoren erfassen. In regelmäßigen Abständen wird es zu der baumelnden Andockstation zurückkehren, wo es seine Batterien auflädt und die aufgezeichneten Daten an die Landefähre zur Übertragung zur Erde weiterleitet.
Das vollständige TRIPLE-nanoAUV 2-System soll im Frühjahr 2026 unter dem antarktischen Schelfeis in der Nähe der Neumayer III-Station getestet werden. Das gekapselte Fahrzeug wird sich durch 4.000 m Eis schmelzen müssen, um subglaziale Seen zu erforschen, die darunter vermutet werden.
Parallel dazu werden auch die beiden anderen Teile der TRIPLE-Initiative in Angriff genommen, die Projekte TRIPLE-GNC und TRIPLE-LifeDetect. Ziel des ersten ist die Weiterentwicklung und Erprobung des Guidance, Navigation and Control (GNC)-Systems des autonomen nanoAUV, während das andere die Entwicklung und Erprobung eines Miniatur-Biolabors (AstroBioLab) zum Inhalt hat, das die vom nanoAUV eingesammelten geochemischen und möglicherweise auch biologischen Proben in situ analysiert.
Auch das spanische Start-Up IQUA Robotics SL mit Sitz in Girona, das im Mai 2016 aus der Universität Girona (UdG) hervorgegangen ist, entwirft, entwickelt und produziert autonome Unterwasserfahrzeuge zur Erkundung des Meeresbodens. Die beiden wichtigsten Fahrzeuge sind die AUVs SPARUS II und GIRONA 500.

Das SPARUS II zählt zur kleinen AUV-Klasse mit einer maximalen Tauchtiefe von 200 m und ist für die Vermessung und die Inspektion aus nächster Nähe zur Kartierung des Meeresbodens konzipiert. Es verfügt über einen großzügigen Laderaum für eine maximale Nutzlast von 8 kg und läßt sich durch nur zwei Personen mit Hilfe eines eigenen Wagens oder eines kleinen Krans einfach bedienen. Die Länge beträgt 160 cm, die Breite 46 cm und die Höhe 49 cm, und die drei Elektro-Triebwerke bringen das AUV auf eine maximale Geschwindigkeit von 3 Knoten. Die Ausdauer beträgt 8 - 10 Stunden.
Das Girona 500 ist ein hingegen rekonfigurierbares AUV, das für eine maximale Einsatztiefe von bis zu 500 m ausgelegt ist und sich vom Aufbau her von allen bisherigen Modellen unterscheidet, denn das Fahrzeug besteht aus einem Aluminiumrahmen, der drei torpedoförmige Rümpfe mit einem Durchmesser von 0,3 m und einer Länge von 1,5 m trägt - sowie andere Elemente, wie z.B. die Schubdüsen. Diese Konstruktion bietet eine gute hydrodynamische Leistung und einen großen Raum für die Unterbringung der Ausrüstungen, während sie gleichzeitig so kompakt ist, daß das Fahrzeug von kleinen Booten aus betrieben werden kann.
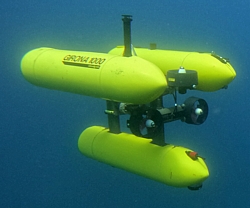
Die Gesamtabmessungen des Fahrzeugs betragen 1 m Höhe, 1 m Breite, 1,5 m Länge und ein Gewicht von weniger als 200 kg. Die beiden oberen Hüllen, die den Auftriebsschaum und das Elektronikgehäuse enthalten, haben einen positiven Auftrieb, während die untere Hülle die schwereren Elemente wie die Batterien und die Nutzlast enthält.
Die Grundkonfiguration des Antriebssystems besteht aus vier Triebwerken, von denen zwei vertikal für das Heben und Stampfen und zwei horizontal für das Gieren und den Auftrieb zuständig sind. Es erreicht eine Höchstgeschwindigkeit von 2 Knoten und eine Dauerleistung von 6 - 8 Stunden. Es ist aber auch möglich, das Fahrzeug so umzugestalten, daß es mit nur drei Triebwerken (einem vertikalen und zwei horizontalen) betrieben werden kann, oder zusätzliche seitliche Triebwerke zur Steuerung der Pendelbewegung hinzuzufügen.
Die Gleiter GIRONA 500 und SPARUS II kommen auch bei dem mit 8,5 Mio. € von der EU und der Industrie finanzierten Forschungsprojekt MORPH (Marine Robotic System of Self-Organising, Logically Linked Physical Nodes) zum Einsatz, das bereits im Februar 2012 gestartet war und auf vier Jahre ausgelegt ist.

Dabei soll ein neues, auf mehrere Roboter verteiltes Unterwasser-Sensorensystem entwickelt werden. Das Projekt zielt darauf ab, möglichst wirklichkeitsgetreue, dreidimensionale Bilder von Unterwasserwelten zu erzeugen – auch unter schwierigsten Bedingungen wie in Riffen oder unter Felsvorsprüngen, bei plötzlich auftauchenden Hindernissen und reduzierter Sichtbarkeit.
Beteiligt sind über 40 Wissenschaftler aus fünf Ländern, darunter aus Deutschland Vertreter der Jacobs University in Bremen und der Technischen Universität Ilmenau. Die Versuche werden im September 2014 vor der Azoren-Insel Faial durchgeführt. Dabei operieren die kleinen, verhältnismäßig günstigen Gleiter gemeinsam als Flotte von 3 - 6 Einheiten und bilden so ein MORPH Supra Vehicle mit komplementären Sensoren. Details bietet der im Netz einsehbare Bericht ,EU project MORPH: Current Status After 3 Years of Cooperation Under and Above Water’, der im September 2015 erscheint.
Zu den jüngeren Aktivitäten der IQUA Robotics gehört im Dezember 2023 die Teilnahme an dem Projekt PLOME (Long-Term Platform for the Observation of Marine Ecosystems), einem von der Universität Girona koordinierten Forschungsprojekt zur Verbesserung der Überwachung, Kontrolle und Bewirtschaftung von Meeresökosystemen. Die Experimente und Tests neuer Technologien werden von Bord des ozeanographischen Schiffes Sarmiento de Gamboa aus entlang der katalanischen Küste in einer Tiefe von 70 - 350 m durchgeführt.
Das im Dezember 2021 gestartete Projekt, an dem auch die Universitat Politècnica de Catalunya - BarcelonaTech (UPC), die Universität der Balearen (UIB), die Polytechnische Universität Madrid (UPM) und das Institut für Meereswissenschaften (ICM-CSIC) beteiligt sind, wird von der spanischen Forschungsagentur und dem Wiederaufbaufonds (Next Generation EU) finanziert.
Im Laufe des Jahres 2022 wird an der Konstruktion des ersten, Lander genannten Prototypen gearbeitet, der als Teil eines marinen Roboternetzwerks zur Langzeitbeobachtung von Meeresökosystemen entwickelt wird. Die am Meeresboden befestigten Stationen beherbergen verschiedene Instrumente und fungieren als Vermittler zwischen den Unterwassergeräten und der Meeresoberfläche, wo eine drahtlose Langstreckenkommunikation mit dem Festland eingerichtet wird.
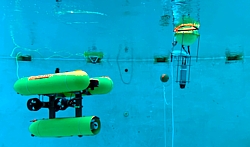
Bereits in der ersten Februarwoche setzt das Team für Meeresrobotik der UIB im Archipel von Cabrera das AUV Turbot (ein SPARUS II) und das von dem spanischen, aus der UIB entstandenen Unternehmen XIROI Technologies S.L. entwickelte autonome Überwasserfahrzeug Xiroi ASV ein, die bei der Suche und Kartierung der invasiven Grünalgenart Halimeda incrassata in flachen Gewässern von 1 - 20 m autonom große Datensätze von Stereobildern aufnehmen. Die letzte Runde Datenerfassung wird dann im März 2023 im Meeres- und Landnationalpark Cabrera durchgeführt.
Die Erfahrungen aus dieser Kampagne, Teil des INVHALI-Projekts, das von der Fundación Biodiversidad finanziert wird, gelten als wichtiger Ausgangspunkt für die nachfolgenden Aufgaben des Projekts PLOME - wie im Juli, als im CIRS, dem Unterwasserforschungs- und Robotikzentrum der UdG, sowie anschließend in Cala del Vigatà in Sant Feliu de Guíxols auf See eine Kampagne stattfindet, bei der die PLOME-Partner erste Tests der verschiedenen Entwicklungen des Projekts durchführen, um die Interoperabilität der Hardware- und Softwarekomponenten zu überprüfen.
Im Dezember 2023 werden weitere erfolgreiche Versuche durchgeführt, bei denen zwei feste Stationen, zwei Unterwasserfahrzeuge und eine Boje an der Oberfläche eingesetzt werden, um Informationen zu übermitteln und die Funktionsweise der verschiedenen Technologien zu testen.
Die nächste Kampagne im Juli 2024 findet im OBSEA statt, dem kabelgebundenen Unterwasserobservatorium der UPC in Vilanova i la Geltrú. In diesem Fall wird neben dem Einsatz eines Landers eine ebenfalls feste Andockstation installiert, die das zwischenzeitlich von der IQUA Robotics und der UdG entwickelte Unterwasserfahrzeug Girona 1000 aufnehmen kann, das täglich Überwachungsaufgaben durchführt und zur Station zurückkehrt, um seine Batterien aufzuladen und Informationen zu übermitteln.

Andockstation
(Grafik)
Die letzte Kampagne des PLOME-Projekts wird im Februar 2025 in den Gewässern des maritim-terrestrischen Nationalparks Cabrera-Archipel und wiederum an Bord der Sarmiento de Gamboa durchgeführt, um die endgültige Entwicklung der Tiefsee-Überwachungsplattform zu validieren. Hierzu gehört auch die Verfeinerung des Navigationssystems des AUV ORAT, das die UIB vor kurzem von IQUA Robotics erworben hat.
Im März und April folgen Versuche mit der speziellen Dockingstation (DS), die nun in dem umgebauten Wassertank der CIRS-Anlage installiert ist. Dabei wird das AUV bei wiederholten An- und Abdockmanövern erfolgreich mit einem von WiSub hergestellten drahtlosen induktiven Ladegerät (WIC) aufgeladen. Wenn die DS mit dem Festland verbunden ist, erleichtert sie die Übertragung der gesammelten Daten und das Aufladen der Fahrzeugbatterien und schützt gleichzeitig das Fahrzeug.
Die IQUA Robotics ist auch einer der Partner beim Projekt MMinE-SwEEPER (Marine Munition in Europe - Solutions with Economic and Ecological Profits for Efficient Remediation), das von der Europäischen Kommission mit 5,9 Mio. € gefördert wird, im Oktober 2024 startet und bis Ende März 2028 laufen wird. Im Rahmen des Projekts werden 21 Partner aus neun europäischen Ländern ihr Wissen, ihre Fähigkeiten und Kapazitäten bündeln, um den nichtmilitärischen Umgang mit mariner Munition zu verbessern, sprich Minen zu finden und zu deaktivieren.
Im Oktober 2016 präsentiert
das von Daan
Pol und Filip Jonker gegründete niederländische
Unternehmen Ortega Submersibles B.V. mit Sitz in
Enschede auf der Dutch Design Week erstmals den Prototyp
eines einsitzigen, offenen U-Boots, mit dem man ohne große Vorkenntnisse
in die Tiefe abtauchen kann. Intern hatte die Firma ihr Tauchboot
bereits auf der Messe und Konferenz Undersea Defence Technology
2015 vorgestellt. Es ist von der Sleeping Beauty inspiriert,
einem motorisierten Unterwasserkanu, das von der britischen Special
Operations Executive während des Zweiten Weltkriegs als Fahrzeug
für einen einzelnen Froschmann gebaut wurde, um heimliche Aufklärungen
oder Angriffe auf feindliche Schiffe durchzuführen.

Die ein-, zwei- und dreisitzigen Modelle MK 1B, MK 1C und MK 1D haben ein futuristisches Design, das eher an einen Jet als an ein klassisches U-Boot erinnert. Die Elektrofahrzeuge sind für Unterwasserfahrten von Personen gedacht, die bereits eine Tauchausrüstung besitzen, wie z.B. Meeresbiologen, Unterwasserarchäologen und Spezialkräfte, die hierbei leicht ein- und aussteigen können, um ihre Umgebung zu erkunden. Zudem können die Boote unter Wasser geparkt werden und bei Bedarf mehrere Wochen dort bleiben.
Die Mini-U-Boote sind jeweils mit zwei Elektromotoren und vier großen Batterien ausgestattet, beschleunigen unter Wasser auf bis zu 20 km/h und sollen ihre Passagiere bis in eine Tiefe von 40 m (andere Quellen: 95 m) bringen. Mit einer Ladung der selbst entwickelten Batterien Hancell 378i soll man gut 148 km weit kommen. In den 6 m bzw. 6,5 m langen Rümpfen sind auch jeweils ein 250-Liter-Sauerstofftank und ein ebenfalls 250 Liter fassender Laderaum integriert. Die mit Luft gefüllte Wabenstruktur gewährleistet den Auftrieb.
Auf großen Cockpitdisplays werden die Route und der aktuelle Aufenthaltsort samt Koordinaten angezeigt, und für die nötige Sicherheit sorgt das implementierte Marine-Navigationssystem, das aus Sensoren, einem Sonar, einem Magnetometer und FLIR-Infrarotkameras besteht, die Hindernisse erkennen und den Fahrer frühzeitig warnen können. Außerdem können die privaten U-Boote nicht nur tauchen, sondern sind auch an der Wasseroberfläche als herkömmliche Boote nutzbar. Preise sind bislang nicht genannt worden, auch über Verkäufe ist nichts bekannt.

Im August 2019 wird die Ortega Submersibles von der Firma James Fisher and Sons plc (JFD) übernommen und vollständig in JFDs bestehendes Angebot integriert. Das Unternehmen ist bekannt für seine spezialisierten technologischen Lösungen, etwa den Betrieb von Rettungstauchbooten für die Royal Navy und die Integration innovativer Technologien für Offshore-Energie und Verteidigung. Die Weiterentwicklung der Ortega-Modelle erfolgt nun unter der Marke JFD Special Operations Vehicles.
Im März 2022 schließen JFD und die US-Firma Blue Tide Marine (BTM) eine strategische Partnerschaft, bei der die BTM zu Demonstrations- und Schulungszwecken das erste Produktionsmodell des Shadow Seal (o. JFD Shadow Seal SDV, Submersible Delivery Vehicle) erwirbt, einer fortschrittlichen Tauchplattform, die eine vergrößerte Ableitung des Ortega MK1-Designs darstellt.
Das äußerst anpassungs- und leistungsfähige leichte taktische Tauchfahrzeug (Tactical Diving Vehicle, TDV), das einen Piloten, einen Navigator und zwei Passagiere an der Oberfläche, halbgetaucht und getaucht mit einer Reichweite von rund 150 km transportieren kann, wird im Mai 2023 auf der SOF Week, der jährlichen Konferenz der Special Operations Forces (SOF) Community in Tampa, Florida, erstmals öffentlich vorgestellt.

Wie im April 2025 gemeldet wird, gilt das JFD Shadow Seal SDV inzwischen als Kandidat für eine Beschaffung durch das niederländische Verteidigungsministerium für die maritimen Sondereinsatzkräfte - neben dem Carrier Seal von JFD oder dem Modell Victa des britischen Unternehmens SubSea Craft.
Bei diesem handelt es sich um ein U-Boot, das von dem britischen Schiffsbauunternehmen BAR Technologies optimiert wurde und dank seines präzisionsgefertigten Profils sowohl auf als auch unter der Wasseroberfläche eine Geschwindigkeit von mehr als 40 Knoten und eine Reisegeschwindigkeit von 30 Knoten zu erreichen.
Das Fahrzeug bietet reichlich Platz für einen Bediener und mehrere Besatzungsmitglieder oder Ausrüstungsgegenstände, so daß es sich perfekt dafür eignet, mit Leichtigkeit und ohne viel Schwimmen entlegene und schwierige Orte für die Erkundung zu erreichen, was die Victa auch für die Marine interessant macht.
Ein weiteres kleines Unterseeboot,
das im März 2017 in
den Blogs erscheint, gelb ist und einen eher albernen Namen trägt,
geht auf das National Oceanography Centre zurück.
Es kann unter dem Eis fahren, eine Tiefe von 6.000 m erreichen und
die gesammelten Daten über eine Funkverbindung an die Forscher auf
dem Begleitschiff übermitteln. Der Antrieb des Elektropropellers erfolgt
mittels Lithium-Ionen-Batterien.

McBoatface
Der betreffende Name Boaty McBoatface war im Vorjahr eigentlich für das neue, 200 Mio. £ teure Polarforschungsschiff des britischen Natural Environment Research Council (NERC) gewählt worden - mittels einer breiten öffentlichen Abstimmung, zu der die British Antarctic Survey (BAS) aufgerufen hatte. Allerdings weigerte sich die Regierung, die keinen Sinn für Humor hat, den Namen zu übernehmen, da er ihr zu unseriös erschien. Stattdessen wird das Schiff auf den Namen RRS Sir David Attenborough getauft, während der Titel Boaty McBoatface - quasi als Trostpflaster, um die Massen zu besänftigen - dem kleinen gelben Roboter-U-Boot verliehen wird.
Im Juni 2017 kehrt das 3,62 m lange U-Boot nach seiner ersten siebenwöchigen Mission im Weddellmeer der Antarktis nach Hause zurück. Den Organisatoren der Expedition zufolge, zu denen auch die University of Southampton gehört, habe Boaty McBoatface während seiner Jungfernfahrt mehr als 180 km zurückgelegt und eine bislang noch nie gewonnene Menge an Daten erfaßt, indem es die Wassertemperatur, die Geschwindigkeit der Wasserströmung und die Turbulenzrate in Tiefen von 4.000 m analysierte.
Eine weitere Fahrt in diesem Jahr führt in die Nordsee, wo das mit neuen chemischen und akustischen Sensoren ausgestattete Boaty nach Spuren sucht, die auf die künstliche Freisetzung von Gas aus dem Meeresboden hindeuten. Nach diversen anderen Einsätzen absolviert das kleine U-Boot im August 2024 auch eine mehr als 2.000 km lange Reise von Island nach Schottland, für die es 55 Tage benötigt. Dabei sucht es nach Meeresschnee, einem kontinuierlichen Partikelregen von oberflächlichen Schichten im Meer bis in die Tiefsee, um Informationen über das Tempo des Klimawandels zu erhalten.

Ebenfalls im März 2017 wird die bereits 2003 in Fall River, Massachusetts, als Entwickler und Hersteller von autonomen Unterwasserfahrzeugen gegründete OceanServer Technology Inc. von der Firma L3 Technologies übernommen, welche wiederum 2019 mit der Harris Corp. zur L3Harris OceanServer fusioniert und Teil der L3Harris Technologies-Unternehmensgruppe wird. Die Firma wird bekannt für die modularen, tragbaren AUVs der Iver-Familie, die weltweit in zivilen, wissenschaftlichen und militärischen Bereichen eingesetzt werden.
Das Modell Iver3 (o. Iver3-580) ist ein kompaktes, 1,7 m langes AUV für bis zu zehn Stunden Einsatz und 100 – 200 m Tauchtiefe, das mit einer Ladung seiner 784 Wh Wechselbatterie mehr als 20 km an Vermessungslinien zurücklegen kann, während der 2,5 m lange Iver4 (o. Iver4 PW UUV) eine erweiterte Plattform für größere Tiefen bis 300 m und längere Einsatzzeiten ist. Er wird standardmäßig mit wiederaufladbaren NiMH-Akkus geliefert, die eine Laufzeit von bis zu 20 Stunden bieten bzw. eine Fahrtstrecke von mehr als 74 km ermöglichen.
Die autonomen, leichten und unbemannten Geräte sind für einfache Handhabung optimiert und von nur einer Person einsetzbar. Bis 2025 liefert die Firma weltweit über 300 Systeme aus.
Die auf den Kaimaninseln beheimatete,
von Martin van Eijk gegründete
niederländische Firma Ocean Submarine B.V. wirbt im
Juni 2017 für ein 19 m langes und 100 Tonnen schweres
Unterwasserschiff, an dessen Entwicklung die Techniker des Unternehmens
seit 2009 arbeiten. Das stumpfnasige U-Boot soll in
einer flugzeugähnlichen Kabine mit Ledersitzen, einer Bar, einer Kombüse
und einer Bibliothek bis zu zwölf Passagiere befördern.

(Grafik)
Das Neyk genannte Tauchboot besteht aus HY-80-Stahl und verfügt über ein modular aufgebautes, tropfenförmiges Rumpfdesign. Es kann bis zu 150 m tief tauchen und erreicht 15 Knoten Geschwindigkeit, angetrieben von zwei je 100 kW starken Außenbord-Elektromotoren mit Batterie fürs Tauchen oder einem Diesel-Generator von Rolls-Royce für den Oberflächenbetrieb. Das Design verspricht dank Bug-, Heck- und Vertikalthrustern eine hohe Manövrierfähigkeit - und das U-Boot kann auch auf eigenen Rollen auf Strände fahren.
Die Veröffentlichung, die auch Varianten wie eine kommerzielle Version mit einer Kapazität von bis zu 40 Touristen, ein Luxusmodell sowie eine Neyk Seal Delivery Vehicle genannte, sehr leise Marineversion mit umfangreichen Sensor- und Waffensystemen umfaßt, basiert bislang auf Renderings und Konzeptzeichnungen ohne verfügbare Echtbilder, so daß ein realer Bau oder Betrieb noch nicht bestätigt werden kann. Das erste Exemplar soll jedenfalls im Januar 2018 fertiggestellt werden, über den Preis gibt Ocean Submarine öffentlich nichts bekannt.
In den Kommentaren werden schwerwiegende Fragen aufgeworfen, die u.a. das Design und die Druckfestigkeit betreffen - und bislang ließen sich auch keinerlei Bestätigungen dafür finden, daß sich das Konzept in einer realen Umsetzung befindet (Stand 2025).
Nachdem der britische Hersteller von Luxussportwagen Aston Martin auf der letztjährigen Monaco Yacht Show seine nautischen Fähigkeiten mit dem Motorboot AM37 belegt hat, zeigt das Unternehmen in diesem Jahr ein weiteres Projekt, bei dem es sein Design-Know-how auf dem Meer einsetzt.

(Grafik)
Mit dem Project Neptune, das gemeinsam mit den Unterwasserexperten von Triton Submarines LLC entwickelt wird, will die Firma nicht nur mehr über Wasser- und Landoberflächen fahren, sondern auch unter die Wasserlinie abtauchen.
Das im September 2017 vorgestellte neue U-Boot im schicken Aston-Design ist das erste Projekt der Aston Martin Consulting, einer Abteilung des Unternehmens, die branchenübergreifende Design-, Konstruktions- und Fertigungsdienstleistungen anbietet. Das Boot, das drei Passagieren die Möglichkeit bietet, das große Blau unter Wasser zu erforschen, basiert auf dem im Jahr 2015 eingeführten 3,2 m langen und 2,6 m breiten Triton-Modell 1650/3 LP, das als das weltweit kleinste und leichteste Drei-Personen-Superyacht-Tauchboot bezeichnet wird.
Von seiner komfortablen, geräumigen Kabine aus können der Pilot und die beiden Passagiere des 1650/3 LP die Unterwasserwelt in einer maximalen Tauchtiefe von 500 m mit einem 360°-Blick genießen, angestrahlt von fünf starken LED-Scheinwerfern. Die Zuladung beträgt 550 kg, die Geschwindigkeit 3 Knoten (5,6 km/h) und die Betriebszeit zwölf Stunden. Die Energieversorgung erfolgt durch eine 30 kWh Lithium-Eisenphosphat-Batterie, welche zwei 5,5 kW Hauptelektroantriebe sowie zwei vertikale Antriebe mit ebenfalls je 5,5 kW speist.

Als die Designphase in die Produktionsphase übergeht, verkünden Aston Martin und Triton im Mai 2018 ein paar weitere Details zu dem Project Neptune, das ein exklusives, streng limitiertes Modell für einige wenige Kunden werden soll, die dann aber auch einen Innenraum mit handgenähten Ledersitzen und Karbonfaserverkleidung genießen können. Die Höchstgeschwindigkeit des Neptune wird demnach bei knapp über 5 Knoten (9,3 km/h) liegen, außerdem soll es die vierfache Beschleunigungsfähigkeit der vergleichbaren Triton-Boote haben, da der Antriebsstrang mit einer höheren Leistung aufwartet.
Bei der Triton Submarines LLC handelt es sich um einen 2007 gegründeten US-amerikanischen Hersteller von bemannten, batterieelektrisch angetriebenen U-Booten mit Sitz in Sebastian, Florida, und einer europäischen Niederlassung in Barcelona. Die Firma bietet Modelle für 1 – 66 Personen und Tauchtiefen von 300 - 11.000 m an, die in den meisten Fällen über eine komplett transparente Passagierkuppel aus Acryl oder Plexiglas verfügen. Es lohnt sich, die verschiedenen Versionen auf der Firmenhomepage anzusehen.
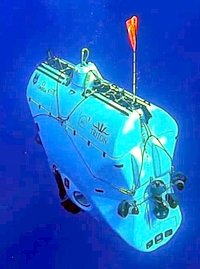
Limiting Factor
Besondere Presse bekommt das Unternehmen, als sein Tiefseelift DSV Limiting Factor (Triton 36000/2) mit Victor Lance Vescovo am Steuer Ende April 2019 den tiefsten Punkt des Challenger Deep im Marianengraben erreicht. Vescovos Firma Caladan Oceanic hatte das Tieftauchfahrzeug mit seiner maximalen Tauchtiefe von 11.000 m im Vorjahr für 37 Mio. $ erworben. Die längere horizontale Achse ist 4,6 m lang, während die kurze horizontale Achse nur 1,9 m breit ist. Die Höhe beträgt 3,7 m.
Der Name Limiting Factor ist übrigens eine Anspielung auf die brillante Science-Fiction-Reihe Culture von Iain M. Banks, in der ein entmilitarisiertes intelligentes Kriegsraumschiff gleichen Namens vorkommt.
Das U-Boot wird über eine doppelte Batterieversorgung und eine Notstromversorgung betrieben, die im Notfall abgeworfen werden kann. Die Hauptbatterie speichert 65 kWh, mit denen vier horizontale 5,5 kW Antriebsstrahler, vier vertikale 5,5 kW Strahler und zwei 5,5 kW Manövrierstrahler versorgt werden. Die Ausdauer wird mit 16 Stunden angegeben, plus 96 Stunden der Notsysteme.
Innerhalb von zehn Tagen werden bis zum Mai von dem Schiff DSSV Pressure Drop aus insgesamt fünf Tauchgänge in Tiefen von 10.714 m und mehr durchgeführt, wobei der Rekordtauchgang bis in 10.925 m (andere Quellen: 10.928 m) vorstößt. Dabei geht es vier Mal in die Challenger-Tiefe und einmal in die Sirena-Tiefe, einen anderen Teil des Marianengrabens, der als zweittiefster Teil des Ozeans gilt.
Das DSV ist damit nach Don Walsh und Jacques Piccard im Januar 1960 sowie James Cameron im März 2012 das dritte bemannte U-Boot, das jemals den tiefsten Punkt der Erde erreicht hat. Über die beiden Vorgänger wurde bereits in der Jahresübersicht 2012 berichtet (s.d.). Ein besonderes Highlight ist daher die Anwesenheit von Walsh an Bord des DSSV Pressure Drop, der fast 70 Jahren zuvor als erster dort unten war.

DSSV Pressure Drop
Die durchschnittliche Tauchdauer lag bei 11 - 12 Stunden, wobei das U-Boot 3,5 Stunden für den Abstieg und ebenso lange für den Aufstieg brauchte. Beim dritten Tauchgang besteht das U-Boot zudem alle erforderlichen Tests für die kommerzielle Zertifizierung und rettet eine wissenschaftliche Landefähre, die beim zweiten Tauchgang auf dem Grund stecken geblieben war. Das DSV ist im Übrigen so ausgelegt, daß zwei Personen bei Bedarf vier Tage unter Wasser bleiben können.
Die Tauchgänge sind Teil von Vescovos ,Five Deeps’-Expedition, die ihn nun zu vier der fünf bekannten tiefsten Stellen des Ozeans geführt hat. Die nächste Station ist der Tonga-Graben, dessen Tiefe mit 10.882 m gemessen wurde, danach geht es zurück zum 8.376 m tiefen Puerto-Rico-Graben auf dem Weg zur letzten Station, der Molloy-Tiefe bei Grönland mit nur 5.669 m. Später folgen diverse weitere Tauchfahrten zu allerlei Wracks, darunter auch zur Titanic.
Im Jahr 2022 werden das DSV und das Hilfsschiff DSSV Pressure Drop für einen ungenannten Betrag an die Meeresforschungsorganisation Inkfish des milliardenschweren amerikanischen Geschäftsmanns und Videospielentwicklers Gabe Logan Newell verkauft, die sie für die weitere Erforschung der Meerestiefen nutzen will, und zwar unter der Leitung von Prof. Alan Jamieson von der University of Western Australia, der als führender Wissenschaftler schon an den meisten Expeditionen von Vescovo beteiligt war. Nach dem Verkauf wird das Tauchboot in Bakunawa umbenannt, entsprechend einem philippinischen Fabelwesen.

(Grafik)
Die Triton Submarines hat zwischenzeitlich im Mai 2020 ihr erstes 24-sitziges Touristen-U-Boot DeepView nach Vietnam ausgeliefert, das 15,4 m lang und 3,5 m breit wie hoch ist und 55 Tonnen wiegt. Mit einem Piloten und einem Kopiloten an Bord werden die Passagiere in klimatisiertem Komfort bis in 100 m Tiefe befördert, wo sie durch eine riesige transparente Röhre aus 140 mm dickem Acryl einen Panoramablick auf die von zehn LED-Scheinwerfern erhellte Unterwasserwelt genießen.
Um das Steigen und Sinken zu kontrollieren, verwendet die DeepView fast 1.800 kg variablen Ballast zusätzlich zu 4.000 kg festem Hauptballast. Antrieb und Steuerung sind elektrisch und werden von zwei 20 kW Hauptstrahlern und vier 12,6 kW Vertran-Strahlern übernommen, wobei die Energie aus einer großen 240 kWh Blei-Säure-Batterie stammt, welche für ganze 14 Stunden Unterwassertourismus mit einer Höchstgeschwindigkeit von 3 Knoten reicht.
Triton baute die DeepView 24 für Vinpearl, eine Luxushotel- und Resortkette in Vietnam, die ab Dezember dieses Jahres vor der Insel Hon Tre in Nha Trang Tauchgänge durchführen wird. Das Boot ist so konzipiert, daß es stabil an der Oberfläche schwimmt, wo die Passagiere auf einem vergitterten Deck stehen können, und es hat eine großzügige Einstiegsluke, die sogar für Personen mit eingeschränkter Mobilität geeignet ist. Die DeepView 24 ist das erste einer Reihe von Touristen-U-Booten, die in verschiedenen Längen für 12 - 66 Passagiere ausgelegt werden können.

Zu den weiteren neuen Modellen der Triton gehört ein wieder auf den Luxusmarkt gerichtetes U-Boot, das von der Garage einer Mega-Yacht aus starten kann. Sein riesiger, kugelförmiger Acryl-Druckkörper mit einem Durchmesser von 2,5 m ist der größte, der je gebaut wurde. Er bietet einen Panoramablick für die vorderen fünf Sitze und eine Gelegenheit, vom sechsten Sitz aus, der am unbequemsten aussieht und seltsamerweise der Sitz des Piloten ist, einige Hinterköpfe zu sehen.
Das 4,55 m lange und rund 11 Tonnen schwere Modell 3300/6 ist so benannt, weil es eine zertifizierte Tauchtiefe von 1.000 m (ca. 3.300 Fuß) erreicht hat und sechs Personen befördern kann. Der Ein- und Ausstieg erfolgt über eine Luke hinter der Kuppel, wobei der Pilotensitz als Trittleiter verwendet wird. Zwei Haupt- und zwei Vertran-Schubdüsen leisten jeweils 12,5 kW und bieten eine Höchstgeschwindigkeit von 3 Knoten. Das Boot, das optional auch einen Roboterarm besitzt, enthält genug Luft und Batteriestrom für mehr als 10-stündige Unterwasserexkursionen, der Preis soll bei etwa 5,5 Mio. $ liegen.

(Grafik)
Im Dezember 2021 stellt Triton zudem das „weltweit erste Tauchboot mit einem frei geformten Acrylrumpf“ vor, das als einzigartiger Ort für Unterwassererlebnisse wie Hochzeiten, gehobene Gastronomie, Glücksspiel im Casino-Stil oder Cocktailpartys beworben wird. Die Modelle der neuen Reihe 660 (o. Triton 660 AVA) basieren auf einer länglichen Blase, die durch ihre seitliche Verbreiterung erlaubt, wesentlich mehr Passagiere an Bord zu nehmen. Der Name leitet sich von der Tauchtiefe ab - das Boot ist für Tauchgänge bis 200 m (ca. 660 Fuß) zertifiziert, während sich das AVA auf die von Triton entwickelte Advanced Versatile Acrylics-Methode bezieht.
Die 660 kann mit bis zu neun Sitzplätzen ausgestattet werden (660/9 AVA), so daß ein Pilot und acht Passagiere pro Ladung der 57 kWh Batterie bis zu zwölf Stunden auf 200 m Tiefe verbringen können. Dabei sorgen vier elektrische Hauptstrahlruder und vier Manövrierstrahlruder mit einer Spitzenleistung von jeweils 5,5 kW für eine Höchstgeschwindigkeit von 3 Knoten.

(Grafik)
Für das neue Projekt Hercules, über das erstmals im Oktober 2022 berichtet wird, hat Triton seinen abgeflachten, gestreckten Acryl-Druckkörper so weiterentwickelt, daß die Blase nun aus dem Körper des U-Boots herausragt, denn die Priorität liegt nicht mehr darin, vielen Menschen eine Unterwasseraussicht zu bieten, sondern wenigen Menschen ein spektakuläres Panorama-Erlebnis in einem luxuriösen Ambiente zu ermöglichen.
Das neueste Tauchbootdesign, das in Zusammenarbeit mit Dark Ocean Design und dem Yachtbauer Espen Oein entwickelt wurde, bietet ein privates und intimes Erlebnis für zwei Personen auf großen, entspannenden Chaiselongues - während der Pilot im hinteren Teil sitzt, wo er das U-Boot über Bildschirme oder ein VR-Headset steuert und vom Geschehen vorne durch zwei Innenschotten getrennt ist.

Die Fahrt unter Wasser kann mit bis zu 8 Knoten erfolgen, wobei die maximale Tauchtiefe auf 200 m begrenzt ist. Die Ausdauer wird mit zehn Stunden angegeben. Die Verlängerungsplattform an der Vorderseite hilft, die horizontale Trimmung auszugleichen. Als nächsten Schritt wird eine strömungsdynamische Analyse des Modells durchgeführt.
Im April 2024 wird gemeldet, daß Triton nach bestandener Seeerprobung und DNV-Zertifizierung nun sein erstes Triton 660/9 AVA an das gehobene Reiseunternehmen Scenic Luxury Cruises & Tours ausgeliefert habe. Das auf den Namen Scenic Neptune II getaufte U-Boot wird an Bord des Kreuzfahrtschiffs Scenic Eclipse II integriert, wo es den Passagieren ermöglicht, einen Tauchgang zu unternehmen, ohne nasse Füße zu bekommen. Das Schiff ist gerade in Australien angekommen und wird in den nächsten zwei Jahren Luxuskreuzfahrten in den umliegenden Gewässern sowie in Indonesien, Neuseeland, im Südpazifik und in der Ostantarktis durchführen.
Im November 2017 startet
das vom Bundesministerium für Wirtschaft und Energie (BMWE) mit 22
Mio. € über drei Jahre geförderte Verbundprojekt Large Modifiable
Underwater Mothership (MUM),
bei dem an der Konzeptentwicklung eines neuartigen, modular aufgebauten,
autonomen und unbemannten Groß-Unterwasserfahrzeugs gearbeitet werden
soll.

(Grafik)
An dem Projediekt mit einem Volumen von etwa 35 Mio. € sind unter der Leitung des Forschungszentrums Jülich und koordiniert von der ThyssenKrupp Marine Systems GmbH (tkMS) Ingenieure der TU Berlin, der Universität Rostock, des Fraunhofer-Instituts für Kommunikation, Informationsverarbeitung und Ergonomie (FKIE), des DLR-Instituts für maritime Infrastrukturen sowie der Firmen Atlas Elektronik aus Bremen und EvoLogics GmbH aus Berlin beteiligt.
Mit der neuen Klasse unbemannter Unterwasserfahrzeuge MUM zur Erkundung und Nutzung der Weltmeere, die sowohl für industrielle als auch für wissenschaftliche Anwendungen eingesetzt werden können, soll das Arbeiten auf offener See für den Menschen sicherer gemacht und gleichzeitig die Natur geschont werden.
Hierfür wird das im Wasser frei schwebende, kabellose Unterwasserfahrzeug mit einem außenluftunabhängigen 80 kW Brennstoffzellen-Antrieb ausgestattet. Zur Abdeckung von Spitzenlasten wird ein Lithium-Ionen-Batteriemodul zugeschaltet. So kann das bis zu 50 m lange XLUUV ohne Unterbrechung über mehrere Wochen in bis zu 5.000 m Tiefe operieren.
Mit der elektrischen Energie wird die gesamte Anlage versorgt, einschließlich des Antriebs mit zwei gegenläufigen Antriebswellen, die jeweils zwei Propeller antreiben. Das U-Boot wird zwischen 1.000 und 2.700 km autonom zurücklegen können. Die Tragfähigkeit liegt bei ca. 10 Tonnen Nutzlast. Es kann zudem mit einer Reihe von Systemen ausgestattet werden, wie Batterien, Sensoren, Transportbehältern und sogar kleinen Unterwasserrobotern, was zu dem Namen ,Mutterschiff’ führte.

Durch die Modulbauweise läßt sich das MUM individuell und kosteneffizient für jede Mission ausstatten, wobei einzelne Basismodule frei mit speziellen Missionsmodulen zu großen Systemen kombiniert werden können. Dabei reicht das Aufgabenspektrum von Nutzlasttransporten und -operationen über Forschungsmissionen bis hin zu stationären Aufgaben in der Tiefsee in den Bereichen Offshore-Energie und Tiefseebergbau, aber auch in der maritimen Wissenschaft. Daher bildet auch die erfolgreiche Integration einer KI eine der Hauptaufgaben des Projekts.
Die erste Projektphase, bei der ein maßstabgetreues Modell im Verhältnis 1:5 gebaut und erprobt werden soll, läuft bis Ende 2020 und bereitet die im Frühjahr 2021 gestartete zweite Phase des Projekts vor. Tatsächlich endet die erste dreijährige Phase mit der Erprobung eines Demonstrators in Pkw-Größe in Kiel. Dieser Versuchsträger ist etwa 4 - 5 m lang und soll vor allem die Autonomiefunktionen, Druckbeständigkeit, Datenübertragung und Steuerung testen.
Die nächste Phase beinhaltet den Aufbau eines Demonstrators in Originalgröße von ca. 25 m Länge. Der Prototyp besteht aus modularen Standardcontainern (10 – 20 Fuß), die als Basis- und Missionsmodule frei kombinierbar sind. Der Bau soll gemäß Projektplan im Sommer 2023 beginnen. Bis Anfang 2025 soll das auf der tkMS-Werft in Kiel fertiggestellte MUM seine Erprobungsphase unter realen Bedingungen durchlaufen und demonstrieren, daß es selbständig arbeiten, navigieren und Lasten aufnehmen und absetzen kann. Detaillierte Informationen zu Tieftauchfahrten oder operativen Einsätzen sind bisher nicht veröffentlicht worden.
Im März 2018 wird über eine Studie berichtet, in welcher Edward DeLong und David Karl von der University of Hawai’i at Mānoa (UH Mānoa) die Meeresmikroben untersuchen, von denen mindestens die Hälfte des Sauerstoffs in unserer Atmosphäre erzeugt wird, die auch Kohlendioxid entfernen und zudem die Grundlage der marinen Nahrungsketten bilden, die die weltweite Fischerei unterstützen.
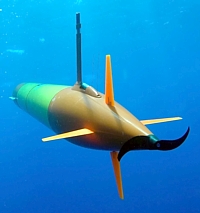
Für die Datenerfassung nutzen die Wissenschaftler drei autonome Unterwasserfahrzeuge mit großer Reichweite (long-range autonomous underwater vehicles, LRAUV), die von Kollegen des Monterey Bay Aquarium Research Institute (MBARI) entwickelt und gebaut wurden. Die Fahrzeuge haben eine Reichweite von über 960 km (andere Quellen: über 1.800 km) und können mit ihren integrierten Sensoren selbständig durch die Meere navigieren, um Phänomene wie Wirbel zu lokalisieren und zu verfolgen.
Dabei handelt es sich um Wassermassen mit einem Durchmesser von über 100 km, die sich monatelang drehen können. Wenn sich solche Wirbel gegen den Uhrzeigersinn drehen, bringen sie Wasser mit lebenswichtigen Nährstoffen für das Phytoplankton aus der Tiefe an die Oberfläche.
Während der Fahrt verwenden die LRAUVs ein an Bord befindliches Miniatur-Roboterlabor, um Wasserproben aus dem umgebenden Meer zu entnehmen und zu verarbeiten. Diese Proben werden auf Faktoren wie Temperatur, Chemie und Chlorophyllgehalt untersucht - letzterer ist ein Indikator für Phytoplankton - und die Ergebnisse werden drahtlos an die Küste oder ein nahegelegenes Schiff übertragen.
Die drei Glider werden nach ihrer Fertigstellung im Vormonat nun mit Versuchen auf offenem Meer beginnen, wenn sie von einem Schiff aus in einen Wirbel in der Nähe von Hawaii ausgesetzt werden, wo sie Daten über dessen Dauer, Stabilität und Einfluß auf die Ozeansysteme sammeln sollen. Technische Details, die über die Erwähnung von hocheffizienten Elektromotoren, einem 2-Blatt-Propeller und hochdichten Lithium-Ionen-Batterien hinausgehen, sind nicht zu finden.
Wie im Oktober 2018 berichtet wird, hat die Indische
Marine Seeversuche mit dem ersten von zwei neuen Tiefsee-Rettungs-U-Booten (Deep-Submergence
Rescue Vehicle, DSRV) der 3. Generation abgeschlossen, die im März
von der o.e. britischen Firma James Fisher and Sons plc (o. James Fisher
Defence Ltd., JFD) im Rahmen eines 250 Mio. $ Vertrags geliefert wurden.
Hafenversuche mit dem DSRV waren bereits Anfang des Jahres absolviert
worden.

der US Navy
Zur Erklärung der Reihenfolge: Das Rettungssystem der 1. Generation bildete der 1999 erfolgte Umbau des von Vickers Slingsby (später: Forum Energy Technologies) hergestellten und im Jahr 1978 in Dienst gestellten bemannten Rettungs-U-Boots LR5, das später als DSAR-1 bekannt wird, während die 2. Generation namens ROKN DSRV-II Ende 2006 in Dienst geht. Das erste DSRV überhaupt war 1965 von der US Navy nach dem zwei Jahre zuvor erfolgten Verlust des Atom-U-Boots USS Thresher entwickelt worden, das wegen eines defekten Rohrs im Atlantik gesunken war.
Ein Unfall, bei dem ein U-Boot auf dem Meeresgrund festsitzt, ist immer ein Wettlauf mit der Zeit, um die Überlebenden so schnell wie möglich wieder an die Oberfläche zu bringen, bevor die lebenserhaltenden Systeme versagen. Hierzu tauchen die elektrisch angetriebenen DSRVs in die Tiefe, die heute mit einer international genormten Schürze ausgestattet sind, die um die Notluke jedes U-Boots der Welt paßt. Zudem haben sie eine Luftschleuse sowie eine Kompressionskammer, in der die Überlebenden und das Rettungspersonal transportiert werden können.

der JFD
Das neue DSRV von JFD kann in Tiefen von bis zu 650 m operieren und eine dreiköpfige Besatzung sowie 14 Überlebende befördern. Es wird von Lithium-Polymer-Batterien angetrieben, verfügt über eine Lebenserhaltungsdauer von 108 Stunden, kann mit Hilfe von Schubdüsenbänken in Strömungen von bis zu 3 Knoten (5,6 km/h) sehr präzise manövrieren und sich in einem Winkel von 60° mit einem U-Boot verbinden.
Darüber hinaus wird das DSRV durch ein komplettes modulares Stützsystem unterstützt, zu dem ein Kran, ein hyperbares medizinisches Zentrum mit einer Kammer, die 90 Personen gleichzeitig aufnehmen kann, Gasflaschen, Ersatzteile, ein ROV und Transportmodule gehören.
Während der Erprobung paart sich das DSRV erfolgreich mit einem U-Boot auf dem Meeresgrund in einer Tiefe von 91 m und einem Winkel von 45°, bevor es ,Überlebende’ an Bord nimmt. Außerdem wird bei den jüngsten Seeversuchen ein Rekord für den tiefsten bemannten Tauchgang in indischen Gewässern aufgestellt, während die indische Marine zum ersten Mal ein ROV in über 750 m und ein Side Scan Sonar in über 650 m Tiefe einsetzt. Die JFD gilt inzwischen als etablierter Anbieter für 42 Seestreitkräfte.
Überaus spannend ist das Konzept des Designers Srijith Mohan, das im November 2018 in den Blogs erscheint.

(Grafik)
Ausgehend davon, daß mit dem Klimawandel und dem Anstieg des Meeresspiegels auch der Bedarf an Transportmitteln steigt, die an die sich verändernden Landschaften und Meeresumgebungen angepaßt sind, hat Mohan dieses Universitätsprojekt für das Opel Innovations Team erstellt, um den Verkehr im Jahr 2055 zu visualisieren.
Mittel- bis langfristig wird erwartet, daß Deutschland im Norden eine neue Küstenlinie haben wird, sowie neue und breitere bestehende Flüsse. Die Städte an der Küstenlinie werden im Wasser verschwinden und die Bewohner müssen in andere Großstädte wie Berlin umziehen. In diesen Megastädten werden daher neue Entwicklungsgebiete entstehen, in denen eine große Bevölkerung versorgt werden muß.
Mohans Lösung zielt darauf ab, den Transport von Gütern auf der letzten Meile zu unterstützen - allerdings in einer grundlegend anderen Form, als die bisher vorgeschlagenen oder schon umgesetzten Konzepte. Das Konzept der fiktiven Berliner Logistics nutzt den Anstieg des Wasserspiegels, um die Logistik innerhalb der Stadt durch ein automatisiertes System von U-Booten zu unterstützen, die die Spree durchqueren. Wobei sich das System selbstverständlich auch auf andere Städte übertragen läßt, sofern nur genügend Wasserstraßen existieren.

(Grafik)
Nach der Übernahme von Paketen oder Schiffscontainern auf See würden die automatisierten U-Boote dann durch Flüsse zu den Zielstädten in aller Welt fahren. Mit spezialisierten Andockstationen und Ladehäfen - die einzigen Stationen, die neu gebaut werden müßten - kann das gesamte System autonom und im Verbund mit Schiffen und anderen Transportdiensten arbeiten, um die Auslieferung von Waren zu rationalisieren.
Um ein nahtloses Transportsystem zu schaffen, soll zudem das ausgedehnte U-Bahn-Netz für die reine Logistik umgewandelt werden, was eine minimale Änderung der Infrastruktur erfordert. Und wohl eine teilweise Flutung der unterirdischen Strecken.
Technische Details über die angedachten Liefer-U-Boote gibt es allerdings nicht - und das gesamte Konzept verschwindet leider wieder in der Schublade.
Im Januar 2019 veröffentlichen Wissenschaftler
des Instituts
für Atmosphärenphysik der Chinesischen Akademie der Wissenschaften
um Prof. Chen Hongbin den im Netz einsehbaren Artikel
,First Rocketsonde Launched from an Unmanned Semi-submersible Vehicle’,
in welchem sie über den Einsatz einer Höhenforschungsrakete für Wetterbeobachtungen
berichten, die von einem autonomen Halbtaucherfahrzeug (USSV)
aus gestartet wurde.
Normalerweise werden für meteorologische Beobachtungen über dem Meer Fallschirmsonden und Driftsondenballons verwendet. Erstere werden von Flugzeugen abgeworfen und zeichnen mit daran befestigten Instrumenten atmosphärische Daten auf, während letztere diese Daten aufzeichnen, während sie tage- bis wochenlang in der Stratosphäre treiben. Beide reichen jedoch nicht aus, um das Seewetter genau zu bestimmen. Deshalb werden Raketensonden eingesetzt, die höher fliegen können als Wetterballons. Zwar können diese von Schiffen aus gestartet werden, aber diese Schiffe sind groß, teuer, benötigen eine Besatzung und können nicht in zu rauhen Gewässern eingesetzt werden.

in China
Vor diesem Hintergrund wurde ein unbemanntes, robustes und hochbelastbares autonomes Navigationsfahrzeug mit einer Länge von 8 m, einer Höhe von 1,6 m und einer Breite von 1 m entwickelt, das sich fast überall im Ozean bewegen kann und für die Sammlung langfristiger, kontinuierlicher und Echtzeit-Messungen des marinen Wetters, einschließlich atmosphärischer Sondierungen in der unteren Troposphäre, konzipiert ist. Die Konstruktion aus Stahlrahmen und Stahlrümpfen mit Bug und Heck aus Fiberglas ist semi-submersibel, das heißt, das Fahrzeug ist größtenteils unter Wasser, mit nur dem Equipment-Teil über der Oberfläche, wodurch es stabile Manövrierfähigkeit und hohe Überlebensfähigkeit unter extremen Seezuständen hat.
Das USSV wird hier nur ausnahmsweise aus Gründen seiner besonderen Funktion aufgeführt, denn ansonsten wird es mit einem Dieselmotor angetrieben, was der schwimmenden Startplattform, die für eine autonome Betriebsdauer von zehn Tagen ausgelegt ist, eine Reichweite von bis zu 3.000 km bei 8 Knoten erlaubt. Bei einem Gewicht von 6.200 kg inkl. Treibstoff beträgt die Nutzlastkapazität 300 kg - für automatische Wetterstationen, Sensoren, Kameraausrüstung und bis zu 48 Raketen zur atmosphärischen Messung, die voreingestellt oder per Echtzeitbefehl gestartet werden können.
Bei den von Mai 2016 bis November 2017 durchgeführten Seeversuchen werden von dem USSV aus erfolgreich Raketensonden gestartet, mit denen die meteorologischen Parameter in der marinen atmosphärischen Grenzschicht (MABL) ermittelt werden, darunter die Temperatur der Meeresoberfläche und vertikale Profile von Druck, Temperatur, relativer Luftfeuchtigkeit, Windgeschwindigkeit und Windrichtung bis 6 km Höhe.
Nach Weiterentwicklung der Technologie sollen zusammenhängende Netze von USSVs mit langer Lebensdauer über die Weltmeere verteilt werden, die nicht nur Meereswetterdaten aufzeichnen, sondern auch zur Erforschung des Meeres selbst eingesetzt werden. Dadurch könnte ein neues, miteinander verbundenes meteorologisches und ozeanographisches (METOC) Beobachtungsnetzwerksystem für USSV entstehen.
Im Februar folgt der Bericht eines Teams der Norwegischen Universität für Wissenschaft und Technologie (NTNU), das ein AUV namens Harald entwickelt hat, benannt nach dem norwegischen Ozeanographen Harald Sverdrup (,Toward adaptive robotic sampling of phytoplankton in the coastal ocean’).

Das Fahrzeug hat eine Länge von 2,4 m, wiegt 32,1 kg und ist für eine maximale Einsatztiefe von 100 m ausgelegt. Es kann sich mit einer Geschwindigkeit von bis zu 2 m/s fortbewegen, wobei die durchschnittliche Ausdauer, abhängig von Tauchprofil und Nutzlast, etwa 24 beträgt. Die Stromversorgung erfolgt durch acht 173,6 Wh Lithium-Ionen-Akkus.
Mit einem Gerät namens ECOpuck, mit dem das AUV ausgestattet ist, werden dreidimensionale, konzentrierte Flecken von Phytoplankton im Ozean aufgespürt und kartiert. Während das Wasserfahrzeug autonom durch einen bestimmten Meeresabschnitt fährt, erkennt dieses Gerät die Fluoreszenz des Chlorophylls, das von dem Phytoplankton produziert wird und rot leuchtet, wenn es Licht ausgesetzt wird. Je nachdem, wie viel Fluoreszenz an welchen Stellen festgestellt wird, kann der Rechner des AUV herausfinden, wo und wie konzentriert die Flecken sind. Das AUV fährt dann um sie herum und erstellt dabei eine 3D-Karte.
Wie nun zu erfahren ist, wurde das Fahrzeug bereits vor einigen Jahren erfolgreich für die Suche nach Phytoplankton-Hotspots in der Nähe der norwegischen Insel Runde eingesetzt. Damit sollte festgestellt werden, ob ein Mangel an Nahrungsquellen für den dortigen Rückgang der lokalen Seevogelpopulationen verantwortlich ist. Schließlich ernähren sich die Vögel von Fischen, die wiederum kleinere Fische fressen, die wiederum Zooplankton (eine Tierart) fressen, das wiederum Phytoplankton (eine Pflanzenart) frißt. Je weniger Phytoplankton es also gibt, desto weniger Nahrung gibt es für die Vögel.
Bislang sind die Ergebnisse der Studie, an der auch Kollegen des norwegischen Runde Environmental Centre, der SINTEF Ocean AS und der portugiesischen Universität Porto beteiligt sind, jedoch nicht schlüssig. An der NTNU werden übrigens noch diverse andere Tauchgleiter entwickelt bzw. betrieben, wie die leichten LAUVs Marie, Fridtjof, Thor und Roald, sowie Rover wie Blueye und Eely und andere Wasserfahrzeuge, die uns teilweise noch in späteren Übersichten begegnen werden.

(Grafik)
Eine ganz besondere Art Wasserfahrzeug bildet der DeepSeaker, ein futuristisches Elektro-U-Boot mit Tragflügeln - und wahrscheinlich das erste Gerät, das unter Wasser tauchen und auch über dem Wasser fliegen kann. Es wurde in den letzten fünf Jahren von Giuseppe Carusi und Osvaldo Irace entwickelt, den Gründern der in Italien ansässigen iSPACE2o srl, die sich mit High-Tech-Projekten für Freizeit, Tourismus und wissenschaftliche Forschung beschäftigt.
Die Spezifikationen besagen, daß der DeepSeaker an der Oberfläche im Tragflächenmodus mit über 23 Knoten fahren und mit Hilfe eines aufblasbaren Ballasttanks unter dem Cockpit bis zu 50 m tief tauchen kann. Er bietet Platz für vier Personen und wird in der Lage sein, eigenständige Entscheidungen zu treffen. Dafür soll das Endprodukt auch etwa 1 Mio. € kosten.
Im September 2019 kündigen die Entwickler an, daß das Fahrzeug mit einem 40 kW Motor des italienischen Herstellers Huracan ausgestattet werden soll, der mit einem Wasserstrahlsystem gekoppelt ist, während die Lithium-Batterien von der koreanischen Firma Kokam stammen werden.

(Grafik)
Einen Durchbruch erlebt das Projekt im Oktober, als die Invitalia, die Agentur des italienischen Wirtschaftsministeriums für ausländische Investitionen und wirtschaftliche Entwicklung, ein Darlehen in Höhe von 1,5 Mio. € gewährt, um mit dem Bau eines Modells in Originalgröße zu beginnen. Das Team plant nun, bis 2021 einen endgültigen funktionierenden Prototyp zu präsentieren.
Im April 2022 wird der Produktionsbeginn des DeepSeaker DS1 angekündigt, den die Designer kräftig überarbeitet haben, damit er noch fortschrittlicher aussieht. Die erweiterte Version, die neben Freizeitnutzung und Tourismus auch für Forschung und Rettungseinsätze beworben wird, besitzt einen Doppelrumpf aus Carbon und Verbundwerkstoff und soll mit zwei 40 kW Elektromotoren ausgestattet werden.
Die iSPACE2o zeigt auf ihrer Firmenhomepage auch noch eine Reihe weiterer Elektroboote wie die kleinen Modelle E-Green und S-Trike sowie die größeren Tragflächenboote NORN und CATARINE. Tatsächlich lassen sich jedoch keinerlei Belege dafür finden, daß es bislang zu einer Umsetzung gekommen ist. Es gibt weder Bestätigungen von Versuchsfahrten, noch von Verkäufen.

Ab 2019 produziert das französische Technologieunternehmen RTsys ein
äußerst kompaktes, leichtgewichtiges und sehr flexibles Mikro-AUV namens NemoSens (o.
NemoSens µAUV) für Wissenschaftler und Offshore-Unternehmen. Das autonome
Unterwasserfahrzeug ist so konzipiert, daß es von nur einer Person
leicht von einem kleinen Boot aus ausgesetzt und geborgen werden kann.
Das 90 cm lange NemoSens hat einen Durchmesser von 12,4 cm und wiegt weniger als 9 kg. Es kann bis in eine Tiefe von 300 m tauchen, bietet eine Ausdauer von über acht Stunden bei 4 Knoten, und der Einsatzbereich kann durch die Möglichkeit erweitert werden, bis zu sieben Mikro-AUVs einzusetzen, die gemeinsam im Schwarmmodus arbeiten und kommunizieren.

Die 2010 gegründete Firma hatte davor das von zwei Personen tragbare Gerät AUV COMET-300 entwickelt, das akustische Bilder liefert, verschiedene Nutzlasten aufnehmen und chemisch-physikalische Bewertungen vornehmen kann.
Das 32 kg schwere AUV hat je nach Sensorbestückung eine Länge von 1,9 - 2,5 m, einen Rumpfdurchmesser von 15 cm, kann im Schwarm navigieren und bis zu 20 Stunden unterwegs sein.
Die maximale Einsatztiefe beträgt 300 m, die Geschwindigkeit 10 Knoten und der Gesamtenergiegehalt der Batterie wird mit 1,6 kWh angegeben.
Wie im März 2020 bekannt
wird, investiert die britische Regierung 2,5 Mio. £ in die Entwicklung
eines extragroßen autonomen
U-Boots mit einer Länge von etwa 30 m für die Royal Navy
– womit es größer wird als das o.e. XLUUV Orca von Boeing. Das
neue Test-U-Boot soll dazu dienen, zu untersuchen, wie Roboter-U-Boote
für den regulären Marinedienst gebaut und betrieben werden können.
Zur Begründung wird betont, daß bemannte U-Boote viele Milliarden kosten, die Ausbildung der Offiziere und Matrosen, die an Bord benötigt werden, weitere Milliarden, und ebenso der Betrieb während der gesamten Lebensdauer.
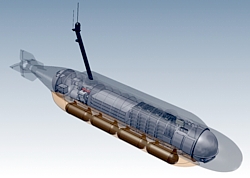
(Grafik)
Daher sind die Boote zu wertvoll, um sie in Gefahr zu bringen, wenn es sich vermeiden läßt. Um diese Nachteile auszugleichen, sollen autonome U-Boote als Unterstützer für die bemannten Boote fungieren, indem sie die Aufgaben der Überwachung, Aufklärung und U-Boot-Bekämpfung übernehmen.
Obwohl 30 m im Vergleich zu einem 97 m langen U-Boot der Astute-Klasse klein erscheinen mögen, ist ein XLUUV im Wesentlichen ein Boot in voller Größe, bei dem die Mannschaftsräume entfernt wurden. Ohne Matrosen an Bord werden die autonomen U-Boote äußerst tarnfähig sein. Zudem sind sie in der Lage, für ihre dreimonatigen Fahrten selbständig das Dock zu verlassen und wieder dorthin zurückzukehren. Und sie können feindliche Ziele aufspüren und ihre Erkenntnisse an die Station zurückmelden.
Ein erster Auftrag in Höhe von 1 Mio. £ wird an das in Plymouth ansässige Unternehmen MSubs Ltd. vergeben, um ein Test-U-Boot mit einer Reichweite von 5.600 km zu bauen. Hierbei wird in der ersten Phase an der Machbarkeit der Umrüstung eines bemannten Tauchboots auf autonomen Betrieb gearbeitet. Wenn die Tests erfolgreich verlaufen, werden weitere Mittel in Höhe von 1,5 Mio. £ bereitgestellt.
Zeitgleich im März erteilt in den USA die DARPA den drei Unternehmen Lockheed Martin, Northrop Grumman Systems Corp. und Navatek LLC (später: Martin Defense Group LLC) Aufträge für die Entwicklung autonomer U-Boote. Das erstgenannte ist uns weiter oben schon mit den AUVs Marlin MK2 und MK3 bereits begegnet. Zusätzliche Unterstützung kommt von der Metron Inc., die an der Energiegewinnung unter Wasser arbeitet und mit der o.e. kanadischen Firma Cellula Robotics Ltd. kooperiert, die eine Wasserstoff-Brennstoffzellen-Technologie zum Antrieb ihrer UUVs nutzt.
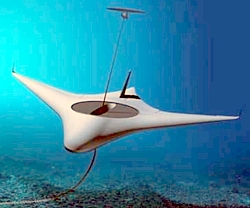
(Grafik)
Im Rahmen des Manta Ray-Programms der DARPA sind Roboterfahrzeuge gefragt, die monatelang ohne Wartung oder menschliche Unterstützung betrieben werden können. Das Programm zielt darauf ab, die operative Kapazität und die Fähigkeiten des Kampfkommandanten auf See zu erhöhen und gleichzeitig die Beeinträchtigung der laufenden Operationen zu minimieren, indem es nach dem Einsatz unabhängig von Schiffen mit Besatzung und Häfen bleibt.
Laut der DARPA befaßt sich das Programm aber nicht nur mit neuen Energiemanagement- und Energiegewinnungssystemen zur Erhöhung der Reichweite, sondern auch mit Antriebssystemen mit geringem Stromverbrauch, der Fähigkeit, im offenen Ozean unter unterschiedlichen Bedingungen zu operieren, und vielem mehr. Sobald Manta Ray alle drei Entwicklungsphasen abgeschlossen hat, wird das Endprodukt ein Demonstrationsfahrzeug sein, das unter den rauhen Bedingungen des offenen Meeres eingesetzt werden kann.
Mit dem Abschluß der vorläufigen Entwurfsprüfungen erreicht das Manta Ray-Programm im Februar 2021 seinen ersten wichtigen Meilenstein. Zudem erteilt die DARPA Aufträge an Northrop Grumman und die Martin Defense Group LLC, um Demonstrationsversionen des Manta Ray zu bauen. Darüber hinaus wird ein separater Auftrag an Metron für das Energiesammelsystem vergeben, mit dem das Roboter-U-Boot praktisch unbegrenzt angetrieben werden kann.
Es gibt verschiedene thermische Steig- und Gleitmethoden, aber auch ein thermoelektrisches Fahren ist denkbar. Entsprechende thermoelektrische Module nutzen den Temperaturunterschied zwischen verschiedenen Teilen des Fahrzeugs, um einen kleinen, aber ausreichenden elektrischen Strom zu erzeugen, der ein unbemanntes Unterwasserfahrzeug antreibt, so daß es monate- oder jahrelange Einsätze durchführen kann, ohne zur Basis zurückkehren zu müssen.
Northrop Grumman und Martin Defense setzen derweil die Entwicklung voll integrierter Demonstrationsfahrzeuge fort und im weiteren Verlauf des Jahres werden die Entwürfe einer kritischen Detailprüfung unterzogen, um ihre Reife zu bestätigen, bevor das ausgewählte Fahrzeug in einer voraussichtlichen Phase 2 hergestellt und getestet wird.

von Northrop Grumman
Dies bestätigt sich im Jahr 2024, als der von Northrop Grumman gebaute Prototyp des Manta Ray UUV im Februar und März vor der Küste Südkaliforniens erfolgreich umfassende Tests im Wasser absolviert, einschließlich des Unterwasserbetriebs unter Verwendung aller Antriebs- und Steuerungsarten des Fahrzeugs: Auftrieb, Propeller und Steuerflächen. Bei seinem Einsatz bewegt sich das 9,9 m lange und etwa 30 Tonnen schwere Fahrzeug, das eine Spannweite von ca. 13,7 m hat, durch effizientes, auftriebsgestütztes Gleiten durch das Wasser. Genauere technische Spezifikationen zum Antrieb sind bislang nicht bekannt.
Eine Besonderheit ist, daß der Manta Ray zerlegt und im Feld schnell aus modularen Abschnitten wieder zusammengebaut werden kann. Die einfache Verschiffung in standardisierten Containern unterstützt die Möglichkeit eines schnellen Einsatzes in der ganzen Welt, ohne wertvollen Platz an den Anlegestellen der Marineeinrichtungen zu belegen. Das Fahrzeug ist mit mehreren Ladebuchten unterschiedlicher Größe und Art ausgestattet, um eine breite Palette von Marineeinsätzen zu ermöglichen. Die DARPA arbeitet gemeinsam mit der US Navy nun an den nächsten Schritten der Erprobung.
Ein weiteres Unternehmen namens PacMar Technologies, das an dem Projekt Manta Ray beteiligt ist, setzt derweil die Erprobung eines neuen Energiegewinnungssystems fort. Das Ziel ist, eine dauerhafte Energieversorgung sicherzustellen, so daß die Fahrzeuge wochen- oder monatelang ohne externe Versorgung operieren können. Details zu den verwendeten Technologien wurden bislang nicht öffentlich gemacht. Es ist jedoch bekannt, daß verschiedene Ansätze in Betracht gezogen werden, zu denen die Energiegewinnung aus Temperaturunterschieden, die chemische Umwandlung von Meerwasser, Solarenergie sowie mechanische Methoden wie Wellen- und Strömungsenergie zählen.

Im Dezember 2020 gründen Ian Estaphan Owen und Jason Webster die Firma Jaia Robotics Inc. mit Sitz in Rhode Island, die sich auf die Entwicklung von sehr kleinen und kostengünstigen autonomen Unterwasserfahrzeugen für die Datenerfassung in Meer, Seen und Flüssen spezialisiert.
Die AUVs sind als Schwärme konzipiert, um große Gebiete schnell und redundant bearbeiten zu können. Der erste Prototyp wird im September 2021 in der Narragansett Bay zu Wasser gelassen.
Das Hauptprodukt der Firma ist der JaiaBot, (o. JaiaBot Hydro), ein ultraschlankes Mikro-AUV mit 96 cm Länge und 7 cm Durchmesser, das inklusive Batterie 3 kg wiegt, bis in eine Tiefe von 60 m taucht und eine Geschwindigkeit von 7 Knoten erreicht. Der Elektroantrieb speist ein direktes Jet-Propulsionssystem, die Einsatzdauer beträgt je nach Missionsprofil bis zu mehrere Stunden, die Reichweite an der Oberfläche 11 km.

Auf Fotos der Homepage ist zu sehen, wie der JaiaBot einfach wie ein Dartpfeil ins Wasser geworfen wird. Die ersten Systeme werden an die University of Delaware und die United States Navy ausgeliefert.
Im Juni 2022 sichert sich Jaia Robotics in einer von der Launchpad Venture Group geführten Seed-Serienrunde eine Anschubfinanzierung von 1 Mio. $, und im Juni 2023 gibt es einen Zuschuß in Höhe von 130.000 $ von der University of Massachusetts, Dartmouth, um im Rahmen des vom US Geological Survey (USGS) finanzierten Projekts ,Use and Validation of Micro-Uncrewed Underwater Vehicles for Water Observing Systems’ die JaiaBot-Sensorik mit anderen bereits im Einsatz befindlichen Sensoren zu vergleichen.

Knapp 175.000 $ kommen im September als Zuschuß von der National Oceanic and Atmospheric Administration (NOAA) hinzu, um in dem Projekt ,Sea Air Boundary Energy Transfer Measurements Using Micro-Sized UxVs’ zusammen mit der Firma Nautilus Defense einen JaiaBot zu entwickeln, der sich nach dem Luftabwurf vom Fallschirm löst, um Daten über die Meeresoberfläche sowie die Unterwasseroberfläche einschließlich 100-Meter-Tauchprofilen zu sammeln.
Das Unternehmen bietet aktuell diverse Varianten des JaiaBot an, die für die unterschiedlichsten Einsatzzwecke modifiziert sind, wie PAM (Passive Acoustic Monitoring), Bio (zur Bewertung der Wasserqualität), eDNA (nimmt Wasserproben für Genomanalysen auf), ER (Extended Range bis zu 115 Stunden) und Storm (kann aus der Luft gestartet werden).
Im August 2022 berichten die
Fachblogs über ein futuristisches U-Boot mit dem Namen Kronos,
das in den Vereinigten Arabischen Emiraten von der Firma Highland
Systems hergestellt
wird, welche der ukrainische Ingenieur Alexander Kuznetsov gegründet
hat.

(Grafik)
Die ursprünglich in Kiew beheimatete Firma mit Kontaktbüro in Suffolk, Großbritannien, hatte im Februar des Vorjahres viel Presse bekommen, als sie auf der internationalen Verteidigungsmesse IDEX-2021 in den VAE das weltweit erste hybride, amphibische und gepanzerte Raupenfahrzeug Storm vorstellte, das von einem Elektromotor angetrieben wird.
Die Arbeit an dem Prototyp begann zwei Jahre zuvor in Kiew, stieß jedoch bald auf technische und finanzielle Probleme. Aufgrund der mangelnden Unterstützung zog die Highland Systems im September 2020 in die VAE und ging eine Partnerschaft mit der Streit Group ein, einem seit 1992 bestehenden Verteidigungsunternehmen mit Sitz in Ras Al Khaimah. Schon fünf Monate später kann das ukrainische Team den ersten Prototypen fertigstellen. In Zukunft ist die Installation zusätzlicher Ausrüstung für Tauchgänge unter Wasser geplant. Daneben bietet Highland Systems u.a. einen kommerziellen Luxus-Trimaran an - sowie den Austausch der Standardmotoren vorhandener Fahrzeuge, Panzer, Schützenpanzer usw. durch Hybridtriebwerke.
In Bezug auf das U-Boot Kronos war die ursprüngliche Idee, das Schiff in zwei Versionen zu entwickeln: eine für den Transport von Arbeitern zur Reparatur der Unterwasserinfrastruktur, für Handels- und Rettungseinsätze, und eine für Freizeitreisen besonders reicher Kunden. Der Krieg zwischen Russland und der Ukraine veranlaßt Kuznetsov jedoch, das U-Boot für militärische Einsätze neu zu konzipieren.

Nach 36 Iterationen - die Presse spricht fälschlicherweise von Prototypen - entscheidet sich das Entwicklerteam für eine völlige Abkehr von der klassischen Zigarrenform. Das bewaffnete U-Boot erhält stattdessen die dynamische Form eines Mantarochens, die es ihm erlaubt, bei voller Fahrt eine sofortige 180°-Drehung zu vollführen - eine Weltneuheit, die vor gegnerischen Torpedos schützt. Das innovative Rumpfdesign reduziert zudem den Treibstoffverbrauch erheblich, erhöht die Maximalgeschwindigkeit und bietet eine überlegene Stabilität.
Das 9 m lange, 7,4 m breite und 2 m hohe dieselelektrisch betriebene Hybrid-U-Boot kann in eine Arbeitstiefe von 100 m bzw. in eine Maximaltiefe von 250 m tauchen, mit einer Geschwindigkeit von 27 Knoten (50 km/h) operieren, hat eine Reichweite von 1.000 km und eine Betriebsdauer von 54 Stunden - die sich aus 18 Stunden im alleinigen Batteriebetrieb und 36 Stunden im Generator-Modus zusammensetzen. Der Luftvorrat reicht für etwa 36 Stunden.
Der Hybrid-Antriebsstrang verbindet einen Dieselgenerator mit einem 1.200 PS starken Elektromotor, der ein Wasserstrahl-Antriebssystem antreibt, mit dem über Wasser 80 km/h erreicht werden. Die Ladezeit der Batterien wird mit anderthalb Stunden angegeben, ohne daß es jedoch Daten über deren Art und Kapazität gibt.

(Transportmodus)
Die Kronos bietet Platz für acht Taucher und einen Piloten (andere Quellen: elf Personen), kann aber auch per Fernsteuerung bedient werden. Sie wiegt 10 Tonnen, hat eine Ladekapazität von 3 Tonnen und für den Landtransport auf einem Anhänger lassen sich ihre Flügel hochklappen.
Mit seinen sechs, von Leonardo S.p.A. entwickelten Black-Skorpion-Miniaturtorpedos kann das U-Boot feindliche Schiffe beschädigen. Darüber hinaus verbessern der Elektromotor und die sonarabsorbierende Beschichtung seine Tarnkappeneigenschaften und ermöglichen ihm Hit-and-Run-Einsätze, bei denen es sich an langsam fahrende oder vertäute Schiffe heranschleicht, um Magnetminen anzubringen, und dann aus sicherer Entfernung zu zünden.
Der erste funktionsfähige Prototyp in Originalgröße wird im März auf der IDEX-2023 in Abu Dhabi vorgestellt.
Etwas befremdlich ist, daß das U-Boot-Konzept schon einmal Anfang 2018 kurz in den Blogs erschien - als ein von Mantarochen inspiriertes ,Privat-U-Boot’ namens Kanaloa, das mit großen klappbaren Flügeln ausgestattet ist und von wasserstoffbetriebenen Hydrojetmotoren bewegt wird. Trotz intensiver Suche ließ sich diese Spur aber nicht wiederfinden.
Im September 2022 findet die erste öffentliche Präsentation des Hydrus Micro Hovering AUV statt, das als vielseitiges und leicht nutzbares System für hochauflösende Unterwasserbilder, Videos und präzise Meßdaten entwickelt wurde und sich an Wissenschaft, Umweltüberwachung, Inspektion und industrielle Anwendungen richtet.

Hovering AUV
Das kompakte, per Hand aussetzbare autonome Unterwasserfahrzeug des 2012 gegründeten und in Perth beheimateten australischen Unternehmens Advanced Navigation, das autonome Fahrzeuge, Inertialnavigationssysteme sowie Sensorlösungen für Anwendungen zu Land, zu Wasser, in der Luft und im Weltraum entwickelt und produziert, ist für die Überwachung von Riffen und Lebensräumen gedacht, aber auch zur Inspektion von Vermögenswerten auf dem Meeresboden und ähnlichem.
Das Hydrus wiegt 7,1 kg und hat die Abmessungen 52,0 x 26,4 x 23,5 cm, doch sein Vorzug gegenüber anderen AUVs ist seine fortgeschrittene Navigation auf Grundlage einer KI-basierten Lösung, welche die sieben Triebwerke steuert. Die Höchstgeschwindigkeit beträgt 1,5 Knoten, die Ausdauer zwei Stunden und die maximale Schwimmtiefe 300 m. Die Reichweite wird mit 1,5 km angegeben.
Im September 2023 arbeitet die Firma mit dem Australian Institute of Marine Science (AIMS) zusammen, um eine Simulation auf dem erst im Vorjahr eröffneten tropischen Meerestestgelände des Instituts, bekannt als ReefWorks, in der Nähe des Great Barrier Reefs, durchzuführen. Bei der Übung kartiert das Hydrus autonom einen vordefinierten Bereich des Meeresbodens auf der Suche nach bestimmten interessanten Punkten - in diesem Szenario sind dies versteckte Objekte, die Unterwasserminen darstellen sollten.
Ein weiterer Test im Oktober erfolgt bei dem Aquakulturunternehmen Tassal. Hier wird untersucht, wie das Hydrus als Instrument zur Datenerfassung eingesetzt werden kann. Bisher hat Tassal für die Probenahmen ferngesteuerte Rover eingesetzt, die an einem Seil befestigt sind, was in der Regel große Besatzungen und teure Ausrüstung erfordert.
In diesem Jahr 2022 entsteht durch die Fusion der ECA Group (Robotik-/Drohnen-Spezialist; gegründet 1936) und iXblue (Navigation, maritime Autonomie, Photonik; gegründet 2000) der französische Hochtechnologiekonzern Exail mit Hauptsitz in La Garde, der laut eigener Aussage zivile und militärische Kunden in über 80 Ländern beliefert, darunter zahlreiche Marinen und Forschungsinstitutionen.

Das Unternehmen wird hier erwähnt, weil es - neben Simulations- und Sensorsystemen, Minenabwehrsystemen, Inspektions-ROVs und Überwasserdrohnen - auch AUVs unterschiedlicher Größe und Reichweite anbietet. Die Produktreihe umfaßt kleine, leichte und tragbare AUVs für die Umweltüberwachung und Infrastrukturanwendungen bis hin zu großen Systemen mit langer Reichweite für Vermessungen und den Küstenschutz.
Das etwa 2009 auf den Markt gebrachte A9-E beispielsweise ist ein tragbares, ziviles System für schnelle Einsätze, das sich von kleinen Booten oder von Hand starten läßt, ein Gewicht von ca. 70 kg hat und 2 m lang ist. Seine maximale Tauchtiefe beträgt etwa 200 m, die Einsatzzeit mit Standardbatterie 24 Stunden, die Höchstgeschwindigkeit 5 Knoten. Ein Folgemodell A9-M wird speziell für militärische Anwendungen wie die Minenabwehr optimiert. Es wird erstmals 2014 spezifisch für Verteidigungsmissionen vermarktet.
Ein bekannter Vertreter der größeren Systeme ist das AUV A18 mit einer Länge von ca. 5 m und einem Gewicht von etwa 850 kg, das bis 300 m tief kommt und Missionen mit einer Dauer von 24 Stunden durchführen kann.

Im Oktober 2024 präsentiert Exail auf der Messe Euronaval 2024 in Paris erstmals öffentlich das ultra-tiefseefähige A6K, welches technisch auf dem AUV UlyX von Ifremer basiert. Dieses hat im September des Vorjahres seine ersten erfolgreichen Tauchgänge bis in 5.920 m Tiefe absolviert und wurde danach für strategische und industrieübergreifende Anwendungen weiterentwickelt.
Das 1984 gegründete französische Forschungsinstitut Ifremer (Institut français de recherche pour l’exploitation de la mer), das aus dem seit 1967 bestehenden Centre national pour l’exploitation des océans, CNEXO) hervorging und 26 Forschungszentren entlang der französischen Küste und auf Tahiti leitet, entwickelte seit Beginn zahlreiche Schiffe und Unterwasserfahrzeuge – darunter die in den 1970er Jahren entworfene und von der Firma ECA gebaute Épaulard, die für die pazifischen Tiefseeebenen gedacht bis 6.000 m tief tauchen kann und Ende 1980 ihre erste operative Kampagne durchführt. Sie gilt als das „weltweit erste einsatzfähige AUV für Tiefsee-Beobachtungen.“
Weitere Beispiele sind die bemannten Tauchboote Nautile (bis 6.000 m Tiefe, drei Personen) sowie Cyana, das von Jacques-Yves Cousteau entworfen und 1969 gebaut wurde (bis 3.000 m Tiefe, ebenfalls drei Personen).
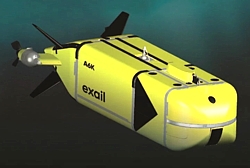
(Grafik)
Daneben sind auch ferngelenkte, kabelgebundene Rover entwickelt und betrieben worden, wie 1998 der Victor 6000 - ebenso wie das erwähnte AUV UlyX, das seinen ersten Tauchgang 2020 absolviert hatte. Das U-Boot mit einer Länge von 4,5 m, einer Höhe von 1,2 m und einem Gewicht von 2,8 Tonnen wird von vier Triebwerken und einem 28 kWh Akku vorangetrieben, erreicht eine maximale Geschwindigkeit von 4 Knoten und besitzt eine Autonomie von 24 - 48 Stunden.
Das darauf basierende und sehr ähnlich aussehende A6K wird nun von der französischen Verteidigungsbeschaffungsbehörde (DGA) als erstes „souveränes Ultra-Tiefsee-AUV“ in Auftrag gegeben. Das Gefährt hat eine Länge von 5 m, einen Querschnitt von etwa 47 × 47 cm und ein Gewicht von ca. 500 kg. Die Einsatzdauer beträgt dank der 28 kWh Batterie, abhängig von Nutzlast und Missionsprofil, bis zu 24 Stunden (andere Quellen: 30 Stunden).
Im Juli 2025 stellt das
türkische Ingenieurbüro DATUM auf
der Messe IDEF 2025 in Istanbul das Konzept eines Mini-U-Boots
mit dem Namen Gurnard vor, das speziell für die Kriegsführung
auf dem Meeresgrund und Operationen gegen Kommunikations- und Stromkabel
entwickelt wurde. DATUM war bereits 2013 mit dem Ziel
gegründet worden, bemannte und unbemannte Mini-U-Boote für militärische
und kommerzielle Zwecke zu entwickeln. Im Jahr 2018 wurde
die Technische Universität Istanbul Anteilseigner,
um das Unternehmen sowohl strategisch als auch finanziell zu stärken.

(Grafik)
Zum Hintergrund: Etwa 99 % des internationalen Datenverkehrs werden durch Unterwasserkabel transportiert, die schon häufig durch Sabotage oder versehentliche Ankerschäden beschädigt wurden. Auch existieren historische Präzedenzfälle für spezielle Unterwasserkabeloperationen, wie beispielsweise die nachrichtendienstliche Operation ,Ivy Bells’.
Die 1971 gestartete gemeinsame Mission der US Navy, der Central Intelligence Agency (CIA) und der National Security Agency (NSA) hatte das Ziel, ein in einer durchschnittlichen Tiefe von 120 m im Ochotskischen Meer verlegtes militärisches Unterseekabel zur Kommunikation der sowjetischen Pazifikflotte abzuhören. Die Operation, bei der umgebaute U-Boote wie die USS Halibut zum Einsatz kamen, wurde fast zehn Jahre mit monatlich getauschten Datenloggern ausgeführt. Die etwa 6 m lange Abhöreinrichtung wurde erst 1980 entdeckt und entfernt, als der NSA-Analyst Ronald Pelton überlief und die Existenz des Programms aufdeckte.
Später entwickeln die USA und Russland spezialisierte U-Boot-Designs für solche Operationen - von umgebauten Atom-U-Booten bis hin zu speziell für die Seekriegsführung gebauten Mikro-Nuklear-U-Booten wie die amerikanische NR-1, die mit nur 400 Tonnen Verdrängung das kleinste jemals gebaute Atom-U-Boot war. Auch China verkündet im März 2025 als erstes Land offiziell, daß es über Systeme verfügt, die Unterwasserkabel in bis zu 4.000 m Tiefe durchtrennen können.
Die nun vorgestellte türkische Gurnard, die von zwei Kampfschwimmern bedient wird, mißt 9 m in der Länge bei 1,8 m Breite, 2,2 m Höhe und einem Gewicht von zwölf Tonnen. Der Druckkörper hält aber nur Tiefen von 600 m stand. Das Lithium-Eisenphosphat-Akkusystem versorgt zwei 12 kW Elektromotoren, mit denen das U-Boot Geschwindigkeiten von bis zu 6 Knoten erreicht. Die Reichweite im Akkubetrieb beträgt 185 km. Das Wesentliche ist jedoch, daß das Fahrzeug über einen hydraulischen Manipulator zum Zerschneiden von Kabeln verfügt und zudem zwei Malaman-Seeminen aussetzen kann, um größere Ziele zu beschädigen.
Ein speziell entwickelter Verbindungsmechanismus ermöglicht es, das Fahrzeug huckepack auf größeren U-Booten zu transportieren - und das kompakte Design erlaubt den Transport in einem Standard-40-Fuß-Container, was die verdeckte Verlegung über See, Luft oder Land erleichtert. Daneben stellt DATUM auf der Firmenhomepage noch mehrere weitere U-Boote vor, die sich bislang allerdings ebenfalls erst im Planungsstadium befinden.
Im August 2025 meldet der US-amerikanische AUV- und Software-Entwickler Nauticus Robotics Inc., daß er mit seinem vollelektrisch betriebenen autonomen Unterwasserfahrzeug Aquanaut Mark 2 während Qualifikationstests 240 km vor der Küste von Louisiana einen neuen Tiefenrekord von 2.300 m ohne Halteseil aufgestellt hat.

Mark 2
Der Unterwasserroboter hat eine Länge von 4,82 m, eine Breite von 2,03 m und eine Höhe von 1,71 m. Sein Gewicht beträgt 4,2 Tonnen, die Nutzlastkapazität 90 kg. Er soll bis in 3.000 m tauchen können, erreicht eine Höchstgeschwindigkeit von 6 Knoten und hat eine Reichweite von 250 km. Mit einer Batteriekapazität von 101,1 kWh soll die Laufzeit 30 – 70 Stunden betragen. Als Logistikplattform und Kommunikationsrelais bei Einsätzen des Aquanaut dient das halbautonome Überwasser-Schiff Hydronaut.
Das 2014 unter dem Namen Houston Mechatronics Inc. (HMI) durch den ehemaligen NASA-Robonaut-2-Projektleiter Nicolaus Radford gegründete Unternehmen mit Sitz in Texas zielte anfangs auf die Anwendung fortgeschrittener Robotik und KI für komplexe Unterwasserarbeiten. 2021 erfolgt die Umbenennung in Nauticus Robotics – verbunden mit einer klaren Ausrichtung auf maritime und ozeanspezifische Anwendungen wie Offshore-Inspektionen, Wartung und Intervention.
Im August 2022 wird das Unternehmen durch einen SPAC-Merger mit der CleanTech Acquisition Corp. unter dem Kürzel KITT an der Nasdaq gelistet und erzielt im Zuge des Börsengangs rund 60 Mio. $ für die weitere Expansion. Neben dem transformierbaren Unterwasserroboter Aquanaut, der zwischen einem autonomen AUV- und einem ferngesteuerten ROV-Modus umschalten kann, entwickelt die Firma auch eine Software-Plattform namens ToolKITT, die KI, autonome Steuerung und Datenanalyse umfaßt.
Im März 2025 wird die Übernahme der SeaTrepid International abgeschlossen, einem Anbieter von Unterwasserroboterdiensten, und im Juni wird eine neue Zusammenarbeit mit dem kanadischen Unternehmen Open Ocean Robotics angekündigt, um die Überwachung und Wartung von Unterwasseranlagen im Offshore-Energiesektor zu verbessern. Im Juli unterzeichnet Nauticus Robotics zudem einen Rahmenvertrag über Dienstleistungen mit dem in Florida ansässigen Unternehmen Advanced Ocean Systems (AOS), um gemeinsam autonome und ferngesteuerte Offshore-Technologien zu entwickeln.

Ebenfalls im August 2025 geht das norwegische Hightech-Unternehmen
für Unterwasserrobotik Eelume eine Partnerschaft mit
dem staatlichen Öl- und Gasunternehmen PETRONAS Research Sdn.
Bhd. (PRSB) in Malaysia ein, um die kontinuierliche Entwicklung,
Verbesserung und den Einsatz einer fortschrittlichen autonomen Unterwassertechnologie
(advanced subsea autonomous technology, ASAT) für den vorgelagerten
Inspektions-, Wartungs- und Reparaturbetrieb voranzutreiben.
Im Mittelpunkt steht das modular aufgebaute, autonome Unterwasserfahrzeug Eelume S, das speziell für unbemannte Inspektionen und die Überwachung kritischer Infrastrukturen entwickelt wurde.
Die Firma mit Sitz bei Trondheim war 2015 als Spin-off der Norwegischen Universität für Wissenschaft und Technologie (NTNU) gegründet worden - auf der Basis von über zehn Jahren Forschungsarbeit an schlangenartigen Robotern (snake robots), die bereits in der Jahresübersicht 2012 ausführlich präsentiert wurden (s.d.).

(Grafik)
Über Tests in der Ostsee mit einer Unterwasserdrohne für die maritime Sicherheit wird im November 2025 berichtet. Demnach absolviert schon seit mehreren Wochen ein autonomes und KI-gesteuertes AUV des Bremer Unternehmens Euroatlas, das den passenden Namen Greyshark trägt, Versuchsfahrten in der Eckernförder Bucht.
Die mit moderner Sensortechnik ausgestattete Tauchdrohne ist 8 m lang, 2 m breit und wiegt mehr als vier Tonnen. Trotzdem erreicht sie eine Spitzengeschwindigkeit von bis zu 13 Knoten (24 km/h). Weitere technische Details gibt es bislang nicht.
Wenn alles nach Plan läuft, soll das haiförmige Unterwasserfahrzeug, dessen Preis bei etwa 8 Mio. € liegt, Anfang 2026 seine Serienreife erreichen. Bis dahin steht noch ein Austausch des Antriebs an, denn aktuell wird der Elektromotor des Greyshark durch Batterien betrieben. Dies soll auf Brennstoffzellen umgerüstet werden, um das angestrebte Ziel einer Reichweite von mehr als 6.000 km zu erreichen.
Hinweis: Das Konzept des Thermal
Glider, dessen Idee erstmals in den 1980er Jahren
von Doug Webb aufgebracht wurde, einem ehemaligen
Forschungsspezialisten der Woods Hole Oceanographic Institution (WHOI)
und späteren Gründer der Webb Research Corp., ist m.E. so interessant,
daß ihm ein eigener Absatz im Kapitel Wärmeenergie gewidmet ist (s.d.).
Denn zum Antrieb nutzen diese Gleiter ausschließlich die Temperaturdifferenzen verschiedener
Meerestiefen.
Nach Abschluß dieses umfassenden Schwerpunkts sollen nun die weiteren Neuigkeiten des Jahres 2014 aufgeführt werden.
Diese beginnen im Juni, als der Hybridschlepper Eddy 1 (o. Eddy 3065) zu Wasser gelassen und auf dem World Congress on Intelligent Transport Systems (ITS World Congress) in Hamburg der Öffentlichkeit präsentiert wird, als erstes Exemplar einer Serie, welche eine Reihe von Schleppern umfassen wird, die von 10-m-Linienschleppern bis zu 40-m-Mehrzweck- und Offshore-Rettungsschiffen reichen, wobei Eddy für ,Efficient, Double-ended and DYnamic’ steht.

Der von den niederländischen Holland Shipyards B.V. in Hardinxveld gebaute Schlepper verfügt über einen Hybridantrieb, vor und hinter dem Kiel in der Mittellinie angeordnete Strahlruder mit Elektro- und Wellenantrieb und eine besonders schlanke, eher kanuförmige Rumpfform. Ein tieferer Kiel auf der Mittellinie sorgt für Richtungsstabilität und erleichtert das Anlegen.
Der Werft zufolge bewirken diese Merkmale zusammengenommen eine erhebliche Steigerung von Leistung, Sicherheit und Wirtschaftlichkeit. Die Länge des Schleppers beträgt 30,3 m, die Breite 12,45 m und der Tiefgang 5 m. Eigentümer und Betreiber ist die Ffs Marine As in Farsund, Norwegen.
Die Idee der Erfinder Baldo Dielen und Walter van Gruijthuijsen hatte 2008 das Interesse der Eigentümer von Holland Shipyards geweckt, Vater und Söhne Hoogendoorn, woraufhin die Partner gemeinsam das Unternehmen Eddy Tug gründeten und schon 2009 die ersten Tests mit einem selbstfahrenden Prototypen durchführten. Um das Konzept aus den ersten Skizzen vollständig auszuarbeiten, braucht es aber fünf Jahre.
Darüber hinaus findet im November 2010 die Taufe des Binnenschiff-Tankers Amulet statt, der das erste dieselelektrisch angetriebene Tankschiff für den Transport von Bunkeröl im Rheingebiet ist. Der Schiffsrumpf wurde in Nantong in China gebaut und bei Holland Shipyards ausgerüstet. Der Antrieb des als ,Öko-Tanker’ bezeichneten Schiffes erfolgt durch zwei elektrische Ruderpropeller.
Im Jahr 2013 werden dann die Wohnschiffe DP Gezina und DP Galyna in Dienst gestellt, ehemalige Fährschiffe der Baujahre 2007 und 2008, die durch die Holland Shipyards im Auftrag von Chevalier Floatels zu modernen, schwimmenden Unterkünften und Service-Schiffen für den Offshore-Einsatz umgebaut worden sind. Sie besitzen ebenfalls diesel-elektrische Antriebe und bieten Platz für bis zu 70 Personen.

Mitte Juni 2014 erreicht der Solar-Trimaran CalypSol die Stadt Baton Rouge in Louisiana, nachdem die Crew um Raymond Christe von Chicago aus 2.320 km zurückgelegt hat, um damit die erste solarbetriebene Kanufahrt auf dem Mississippi erfolgreich zu absolvieren, die zwei Jahre zuvor begonnen hatte.
Das mit einem Torqeedo-Elektromotor und Solarpaneelen ausgestattete Boot der CalypSol Group ist 6,6 m lang. Um die Batterien kühl zu halten, wird eine spezielle Lösung mit Lüftern umgesetzt.
Der Name sollte nicht mit dem etwas anders geschriebenen CALyPSOL-Reaktor des Deutschen Zentrums für Luft- und Raumfahrt (DLR) verwechselt werden, der solar-thermische Reaktionen in einem Sonnenofen untersucht.
Ebenfalls Mitte Juli 2014 findet in Monaco das erste dort organisierte Solarbootrennen überhaupt statt. An dem Solar1 Monte Carlo Cup 2014 (o. Monaco Solar Boat Challenge) genannten internationalen Rennen nehmen 16 Boote von Ingenieurstudenten internationaler Universitäten aus ganz Europa und Übersee teil - und der berühmte, 30 m lange Solarkatamaran MS Tûranor PlanetSolar, über den in der Jahresübersicht 2010 ausführlich berichtet wurde, dient als Veranstaltungsplattform. Gründer der für das Rennen zuständigen Solar1 Association ist Sergei Dobroserdov, der auch der Direktor von Nahkimov Yachts mit Sitz in Monaco ist.

Monte Carlo Cup 2014
Der Wettbewerb besteht aus drei Disziplinen: einem Flottenrennen, einem Sprint im Einzelrennen und einem Slalomrennen. Das Flottenrennen geht über eine Seemeile mit einer Reihe von Runden. Das Boot, das als erstes alle Runden absolviert hat, gewinnt. Der Sprint wird über 0,3 Seemeilen ausgetragen. Der Slalomkurs geht ebenfalls über 0,3 Seemeilen mit einer Reihe von Manövern.
Dabei gibt es drei Klassen von Schiffen: A (Prototypen), Open (Seriennah) und V20 (Einheitsklasse). Schiffe der Klasse A dürfen nur vier Solarzellen haben, während die einzige Einschränkung für die offene Klasse ist, daß die Schiffe nicht länger als 8 m sein dürfen. In der Offenen Klasse geht der Sieg an das niederländische Clafis Private Energy Solar Team I, während ihre Landsleute, das Dutch Solar Boat Team, in der A-Klasse triumphieren. Zusätzlich zu den Preisen für die Geschwindigkeit gibt es auch Preise für Innovation und Fairplay.
Parallel dazu findet auch die erste Monaco Energy Boat Challenge (MEBC) statt, ein internationaler Wettbewerb für nachhaltige, emissionsfreie und innovative Antriebstechnologien im maritimen Bereich, der vom Yacht Club de Monaco (YCM) organisiert wird. Die Challenge umfaßt verschiedene Klassen wie die AI Class (autonome Boote mit KI-Steuerung), Energy Class (standardisierte Rümpfe mit experimentellen Antrieben), SeaLab Class (Wasserstoff-Prototypen) und Open Sea Class (Größere Prototypen bis 25 m). Das Event wird kontinuierlich weiterentwickelt und setzt auch das Konzept Solar1 jährlich fort.
Ein modulares Kajak namens Predator
XL, das im Juli 2014 auf
der International Convention of Allied Sportfishing Trades (ICAST)
Show in Orlando, Florida, von der Firma Old Town als
neues Flaggschiff der Predator-Familie vorgestellt wird, besitzt ein
einsteckbares Minn-Kota-Elektromotormodul - wenn man keine Lust zu
paddeln hat.

Die vollständig geschlossene Einheit wird direkt in das Kajak vor der Sitzposition eingebaut und liefert eine salzwassertaugliche Schleppleistung mit Vorwärts- und Rückwärtsgang. Das fußbetätigte Rudersystem vervollständigt das Antriebspaket und ermöglicht die Steuerung sowohl vorwärts als auch rückwärts, so daß man wirklich freihändig angeln kann. Das digitale Managementsystem des Geräts soll zudem einen ganztägigen Betrieb erlauben. Das Boot mißt 4 m und wiegt ohne die Motorkonsole 41,7 kg, die zusätzlich 11,6 kg wiegt.
Die Minn-Kota-Konsole verfügt über einen Geschwindigkeitsregler, eine Batterieanzeige, einen USB-Ladeanschluß sowie Befestigungs- und Aufbewahrungsvorrichtungen für das Sonar. Das motorisierte Predator XL mit Minn Kota-Modul, Batteriebox und Ruderanlage soll ab November im Einzelhandel für 2.699 $ angeboten werden, die Batterie selbst ist nicht im Lieferumfang enthalten.

ePDL+ 132
Im Juli 2023 bringt Old Town mit dem BigWater ePDL+ 132 einen E-Bike-ähnlichen Schub ins Kajakfahren, denn das Wassersportgerät - eine neue Version des bestehenden BigWater PDL 132 mit Pedalantrieb - verfügt über ein pedalbetriebenes elektrisches Antriebssystem wie ein E-Bike. Das Kajak selbst ist 4 m lang, 91,4 cm breit, wiegt 55 kg und kann mit bis zu 227 kg beladen werden.
Wie bei vielen E-Bikes gibt es auch hier einen akkuschonenden Null-Hilfs-Modus und einen reinen Tempomat-Modus, bei dem der Motor ohne Anstrengung läuft. Über Drucktasten auf dem LCD-Bildschirm des Antriebsmoduls kann der Benutzer zwischen fünf Stufen elektrischer Unterstützung und fünf Tempomat-Geschwindigkeitsvoreinstellungen wählen. Eine Ladung des 20 Ah Lithium-Akkus soll für Laufzeiten von drei Stunden bei Tempomatstufe 5 bis zu 46 Stunden bei Stufe 1 ausreichen. Das BigWater ePDL+ 132 soll Anfang 2024 für 5.499 - 5.999 $ in den Verkauf gehen.
Es ist sinnvoll, an dieser Stelle auch gleich die anderen Kajaks und entsprechenden Zusatzantriebe aufzuführen, über die in den Folgejahren berichtet wird. Dazu gehört das im Februar 2015 auf der boot Düsseldorf erstmals gezeigte E-Kayak-Kit der Klepper Faltbootwerft AG, die als der älteste Faltboot-Hersteller der Welt gilt.
Zum Hintergrund: Im Jahr 1905 baut der deutsche Architekturstudent Alfred Heurich ein faltbares Kajak mit Holzrahmen, das er Dolphin nennt. Bald darauf sichert sich Johann Klepper das Patent von Heurich und führt das Faltkajak 1907 in die Massenproduktion und Vermarktung ein. Firmensitz ist das oberbayerische Rosenheim. Im August 2020 wird die Klepper Faltbootwerft von der neu gegründeten und in Hamburg beheimateten Klepper Lifestyle GmbH übernommen, einem Unternehmen der Compass Logistics International AG. Bis zu diesem Zeitpunkt hat Klepper weltweit über 250.000 Faltboote verkauft.

Der neue E-Kayak-Kit für die Aerius-Faltkajaks von Klepper fügt dem klassischen Faltboot ein wenig moderne Technologie und Komfort hinzu, denn mit dem solarbetriebenen Elektroantrieb kann sich der Paddler zurücklehnen und den kleinen Motor die Vorwärtsbewegung übernehmen lassen.
Der Bausatz enthält einen hocheffizienten Elektromotor mit Karbonpropeller, eine versiegelte 18 Ah Bleibatterie und eine im Cockpit montierte digitale Steuereinheit. Der Motor ist in das fußbetätigte Ruder integriert, so daß er sich schnell und einfach vom Cockpit aus ins Wasser absenken und wieder herausheben läßt. Das Ruder ersetzt auch das Paddel bei der Steuerung des Bootes während der Benutzung des Motors.
Zur Verlängerung der Fahrzeit gibt es starre und faltbare Solarpaneele, die oben auf dem Deck montiert werden und genügend Strom für einen ganzen Tag auf dem Wasser liefern. Ein Controller verhindert eine Überlastung des Systems, und das Kit enthält Ladeanschlüsse für Mobiltelefone, GPS-Geräte, Außenlampen und andere batteriebetriebene Geräte.
Die Firma schätzt, daß das E-Kajak bis zu 52 km zurücklegen kann, wenn es im batteriesparenden, langsamen Modus bei 4 km/h und mit acht Stunden Sonnenlicht betrieben wird. Alternativ kann es im Höchstgeschwindigkeitsmodus bis zu 8 km/h fahren, was die Reichweite aber auf 15 km reduziert.
Die Motorbausätze beginnen mit 2.329 € für den Motorbausatz mit 18 Ah Batterie, hinzu kommen die Solarmodule, wobei ein starres 30 W Paneel 590 € kostet, ein faltbares 25 W Paneel 652 $. Warum für die Angaben zwei verschiedene Währungen benutzt werden, hat sich mir nicht erschlossen. Für ein komplettes E-Kajak mit einem Solarmodul liegt der Einstiegspreis also bei 5.800 €, für ein Boot mit zwei Solarmodulen bei 6.400 €. Zum Zeitpunkt dieses Updates im Herbst 2025 läßt sich das Kit auf der Firmenhomepage aber nicht mehr finden.

Doppelmotor
Eine ähnliche Fahrtunterstützung bietet ein System des in Florida ansässigen Unternehmens PacMotor, das ein bestehendes Kajak um zwei Motoren ergänzt. Das System, das im Oktober 2021 in den Blogs erscheint, besteht aus drei Komponenten: einem Doppelmotor, der hinter dem Cockpit am Rumpf befestigt wird, einem fest verdrahteten 139 Ah Lithium-Akkupack und einer wasserdichten, schwimmenden Bluetooth-Fernbedienung.
Jeder Motor befindet sich am Ende eines klappbaren Aluminiumarms. Diese Arme werden über beide Seiten des Kajaks heruntergeklappt und über die Joystick-Fernbedienung aktiviert, wenn ein Schub benötigt wird. Wenn keine elektrische Unterstützung benötigt wird, werden sie aus dem Wasser gezogen. Da die beiden Motoren unabhängig voneinander arbeiten, ist das System in der Lage, das Boot zu beiden Seiten zu drehen, indem es ihre Schubkraft relativ zueinander verändert. Es ist auch möglich, das Kajak auf der Stelle zu drehen, indem man die Motoren in entgegengesetzte Richtungen laufen läßt.
Das System erreicht eine Höchstgeschwindigkeit von 10 km/h, kann in Salz- oder Süßwasser verwendet werden, und die Motoreinheit wiegt nur 4 kg, während die Batterie 4,5 kg wiegt. Nach Angaben der Firma reicht eine Batterieladung für über drei Stunden Betrieb. Der Doppelmotor alleine wird für 698 $ angeboten, samt 50 Ah Batterie und Ladegerät kostet das Set 1.046 $.
Leider muß konstatiert werden, daß die zunehmende Militarisierung auch nicht vor Kleinbooten Halt macht. So setzt die Ukraine elektrische Kampfkajaks als leise, aber tödliche neue Waffe ein, wie im August 2023 berichtet wird. Auch amerikanische und britische Soldaten sollen derartige Boote verwenden, die allerdings zehnmal teurer sind, während die vom ukrainischen Verteidigungsunternehmen Adamant Verf hergestellten Modelle pro Stück nur etwa 2.500 $ kosten.

Die als Poloz-M16 bekannten Kampfkajaks werden mit Paddeln oder einem kleinen elektrischen Trolling-Motor angetrieben und können so unbemerkt operieren. Der Motor kann auch ferngesteuert werden, wodurch das Kajak ähnlich wie eine Marinedrohne funktioniert. Genauere technische Details darüber gibt es nicht, auch nicht über die Batterieausstattung des Gefährts.
Es kann bis zu drei Soldaten oder bis zu 250 kg Nutzlast befördern und ist mit einem automatischen Granatwerfer des NATO-Typs UAG-40 aus ukrainischer Produktion ausgestattet, der am Bug des Kajaks montiert ist und über einen speziellen Mechanismus verfügt, der den Rückstoß der Waffe dämpft und das Kajak auf dem Wasser stabil hält.
Den Berichten zufolge wurde das Poloz-M16 bereits im Oktober letzten Jahres am Fluß Oskil in der Region Charkiw eingesetzt, als ukrainische Soldaten nächtliche Aufklärungsmissionen in der Nähe russischer Stellungen am Flußufer durchführten, Sprengstoff transportierten und schließlich den Durchgang einer Angriffsgruppe sicherten, die die russischen Truppen zum Rückzug zwang. Zweifellos gab und gibt es noch wesentlich mehr Einsätze, die bislang jedoch geheim blieben.
Auf der iCast 2025 Fishing Equipment Expo in Florida im Juli 2025 stellt die kalifornische Firma Fluxjet Marine den funktionsfähigen Prototyp eines motorbetriebenen Kajaks vor, der mit einem elektrischen Jet-Antriebsmodul ausgestattet ist, das nur 1,8 kg wiegt.
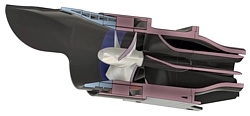
von Fluxjet Marine
(Grafik)
Das Unternehmen hatte sechs Jahre daran gearbeitet, das Düsenpumpensystem zu vereinfachen und alle notwendigen Komponenten in einem Bauteil zu vereinen. Der dabei entstandene Motor kann nahtlos in den Rumpf eines speziell angefertigten Kajaks angebracht und für Wartungsarbeiten auch jederzeit einfach wieder abgebaut werden.
Das System verwendet allerdings keinen üblichen Motor, bei dem sich eine Antriebswelle dreht, um ein Laufrad anzutreiben. Stattdessen ist um das Laufrad herum ein elektromagnetischer Ringmotor aufgebaut. Das Design soll die Übertragung des Drehmoments auf die Laufradschaufeln erhöhen und gleichzeitig dazu beitragen, den Motor zu kühlen. Da es keine Lufteinschlüsse gibt, sind auch die Vibrationen und Betriebsgeräusche reduziert.
Bei den meisten Düsenpumpen drehen sich die Laufradschaufeln getrennt von den Innenwänden eines unbeweglichen Metallrings, der sie umgibt. Dabei können kleine Gegenstände wie Sandkörner angesaugt werden, sich zwischen den Schaufeln und der Ringwand festsetzen und das Laufrad einklemmen. Als Resultat können sich die Klingenenden allmählich abnutzen.

Beim Fluxjet-System sind die Schaufeln dagegen mit dem Ring verbunden, der sich mit dem Laufrad dreht. Es gibt keine Spalten, in denen sich Sand festsetzen kann. Die bewegliche Oberfläche des Spinnrings soll zudem dazu beitragen, mehr Wasser durch das System zu drücken. Das steigert die Leistung auf kontinuierliche 5 kW.
In dem etwa 3,35 m langen, 0,89 m breiten und 40 kg schweren Fluxjet-Anglerkajak für 2.999 $ wird die Lenkung über zwei kabelgebundene Pedale gesteuert, welche die vektorgesteuerte Schubdüse des Fluxjet hin und her drehen. Ein Ruder, in dem sich Unkraut verfangen kann oder das auf dem Boden kratzt, wird damit überflüssig. Die Akkulaufzeit soll 16 Stunden betragen und das Kajak mit einem 1 kW Fluxjet-Antrieb auf 10 km/h beschleunigen können.
Eine weitere Einheit, die aber noch nicht auf dem Markt ist, soll eine Leistung von 15 - 25 kW erreichen. Der 6 kg schwere Motor soll ein kleines Boot damit auf 32 km/h beschleunigen können.
Im August 2025 stellt die für die virtuelle Navigation auf dem Bildschirm bekannte Firma Garmin ihren neuesten Force-Antrieb vor, einen Trolling-Motor der seit 2019 bestehenden Reihe. Der elektrische Kajakmotor läßt sich dank eines Fußpedalsystems völlig freihändig bedienen und erlaubt es, vorwärts und rückwärts zu fahren und Nullwendevorgänge auszuführen.

Das Basispaket des Force Current Trolling-Motors wird mit einer einfachen Funkfernbedienung geliefert, und es gibt sogar eine gestenbasierte Steuerung, bei der man die Fernbedienung einfach in die Richtung zeigt, in die das Kajak fahren soll. Kompatible Smartwatches von Garmin lassen sich ebenfalls anschließen und dienen als kabellose Motorsteuerungen.
Noch praktischer ist aber das optionale Zwei-Pedal-Steuersystem, dessen mit AA-Batterien betriebenen Pedale kabellos mit dem Trolling-Motor verbunden werden und eine präzise, sofortige Steuerung ohne lästige zusätzliche Hardware oder Kabel ermöglichen.
Der Force Current ist so konzipiert, daß er nach Bedarf sofort ins und aus dem Wasser gekippt werden kann. Der 11,3 kg schwere Motor läßt sich in Sekundenschnelle von der Heckhalterung abnehmen und kann ebenso wie die Fußpedale leicht vom Boot entfernt und gelagert werden. Garmin bringt den Force Current nun zu einem Preis von 3.599 $ mit Fußpedalen oder für 2.999 $ ohne auf den Markt.
Ende Oktober 2014 wird in Marina Bay, Singapur, erstmalig die maritime RobotX Challenge ausgetragen. Die von der AUVSI Foundation, der National University of Singapore, dem US-Office of Naval Research und weiteren Förderern organisierte Veranstaltung ist der erste internationale Hochschulwettbewerb, der sich ausschließlich mit autonomen Überwasserfahrzeugen befaßt (Unmanned Surface Vehicles, USVs).

MIT/Olin College
Die angetretenen 15 Teams aus den fünf Ländern Australien, Japan, Südkorea, Singapur und USA erhalten jeweils die gleiche Katamaran-Rumpfplattform – einen Wave Adaptive Modular Vessel (WAM-V) von Marine Advanced Research – und müssen ihn mit eigenen Sensoren, Rechnern, Software und Antrieben zum vollautonomen USV aufrüsten. Damit sind dann Aufgaben wie autonome Navigation, Hindernisausweichung, Zielidentifikation, die Erkennung akustischer Quellen unter Wasser und Docking-Manöver zu absolvieren.
Gewinner ist das Team MIT/Olin College (USA), das ein Preisgeld von 20.000 $ einheimsen kann, gefolgt vom Korea Advanced Institute of Science & Technology (KAIST) sowie der Queensland University of Technology (Australien) auf dem zweiten und dritten Platz. Die RobotX Challenge wird seitdem im Zwei-Jahres-Rhythmus fortgeführt.
Ebenfalls im Oktober 2014 stellen Forscher des Technik-Dienstleisters DNV GL aus Hamburg den Entwurf eines modernen Schiffes vor, das ohne Besatzung auskommt und zudem mit einer Batterie betrieben wird. Die DNV GL ist im Vorjahr als die weltgrößte Klassifizierungsgesellschaft für Schiffe, Bohrinseln oder andere technische Anlagen aus der Fusion der beiden Unternehmen Det Norske Veritas (DNV) und Germanischer Lloyd (GL) hervorgegangen. Die Zentrale des norwegischen Unternehmens ist in Oslo angesiedelt, der wichtige Bereich Maritime in Hamburg.

(Grafik)
Das zukunftsträchtige, autonome Konzeptschiff mit dem Namen ReVolt soll auf Anregung der norwegischen Regierung entlang der Küste für den Kurzstreckenverkehr eingesetzt werden, um Lkw-Transporte auf der Straße zu ersetzen. Zudem kann das Schiff über seine Lebensdauer von 30 Jahren im Vergleich zu einem dieselbetriebenen Schiff rund 34 Mio. $ Betriebskosten einsparen.
Das Schiff ist im Konzept gut 60 m lang und 14,50 m breit und könnte rund 100 Standardcontainer transportieren, aber auch andere Güter wie zum Beispiel Autos. Weil es keine Kommandobrücke und keine Räume für die Besatzung gibt, kann das Schiff mehr Ladung aufnehmen. Die ReVolt hat zwei Heckpods und ein einziehbares Azimutstrahlruder im Bug. Das Schiff fährt mit einer Geschwindigkeit von 6 Knoten und ist damit etwas langsamer als vergleichbare Küstenschiffe. Die Reichweite wird ungefähr 180 km betragen, dann muß die Batterie vier Stunden lang wieder aufgeladen werden. In einem Fjord in Norwegen wurde bereits ein Schiffsmodell im Maßstab 1:20 gebaut und getestet, das 3 m lang ist.
Im Oktober 2015 folgt die Meldung, daß die norwegische Regierung gemeinsam mit der DNV GL nun das Green Coastal Shipping Programme (GCSP) ins Leben gerufen habe, dessen Ziel es ist, die umweltfreundlichsten Schiffe der Welt zu bauen. Das gestaffelte Programm umfaßt fünf Pilotprojekte, angefangen mit einer Plug-in-Hybrid-Frachtfähre, deren Ziel die Entwicklung kostengünstiger und rentabler Kurzstrecken-Containerschiffe ist, die mit einem hybriden LNG- und Batterieantriebssystem betrieben werden.

(Modell)
Das zweite Projekt ist ein umweltfreundliches Shuttle-Tanker-Projekt, bei dem Batterien zum Einsatz kommen, das dritte ein Hybrid-Landwirtschaftsschiff-Projekt, dessen Ziel die Optimierung eines Hybridantriebssystems ist, während das vierte Projekt den Umbau eines Frachtschiffs zu einem Hybrid-Batterie- und LNG-Tanker umfaßt. Das letzte Projekt betrifft die Entwicklung eines grünen Hafens mit geringem Energieverbrauch und minimalem Kohlenstoff-Fußabdruck. Zu den Technologien, die dafür eingesetzt werden, gehören elektrische Schwerlastfahrzeuge und Kräne.
Da das maßstabsgetreue Modell bislang nur Sensoren zur Schätzung der eigenen Position und Bewegung enthält, aber keine zur Beobachtung der Umgebung, und weil auch ein Kommunikationssystem für die Übertragung der aufgezeichneten Daten an Land fehlt, arbeiten im Herbst 2017 zwei Studenten daran, das Modell mit den notwendigen Sensoren auszustatten und damit im Hafen von Trondheim Experimente durchzuführen.
Seit 2018 gibt es aber keine neuen öffentlichen Projektfortschritte, Demonstratoren, Folgestudien oder weitergehende Industriekonsortien rund um die ReVolt. Das GCSP wird hingegen fortgeführt und umfaßt bis 2025 Testfelder und Pilotprojekte mit alternativen Treibstoffen wie LNG, Methanol und grüner Stromversorgung sowie die Entwicklung und den Einsatz von elektrischen und hybriden Küstenschiffen nebst Maßnahmen zur Effizienzsteigerung und Emissionsreduktion.
Im November 2014 findet mit dem Desafio Solar
Brasil in Búzios, nahe Rio de Janeiro, der erste größere
nationale Wettbewerb für solarbetriebene Boote in Brasilien statt,
bei dem 23 Teams aus sieben brasilianischen Bundesstaaten gegeneinander
antreten. Frühere Wettbewerbe fanden vor allem auf regionaler Ebene
statt. Der neue überregionale Wettbewerb wird von der Universidade
Federal do Rio de Janeiro (UFRJ) und der Energiegesellschaft Ampla organisiert,
mit Unterstützung der Stadtverwaltung Búzios. Die Gewinner erhalten
die Möglichkeit, ihr Land im Juli 2015 beim Solar1
Monte Carlo Cup in Monaco zu vertreten.
Im Dezember 2014 berichten die Fachblogs darüber, daß Rolls-Royce, das VTT Technical Research Centre of Finland Ltd. und die Aalto University gemeinsam an einem neuen Projekt im Wert von 6,6 Mio. € arbeiten, das bis 2017 läuft und den Weg für autonome Schiffe ebnen soll. Die Advanced Autonomous Waterborne Applications Initiative (AAWA) wird die Spezifikationen und vorläufigen Entwürfe für die nächste Generation fortschrittlicher Schiffs-Lösungen erstellen. Für die Partner bildet die Kombination aus automatisierten Schiffssystemen und ständiger Kommunikation auf hohem Datenniveau den „nächsten großen Wandel in der Schiffahrtsindustrie.“

(Grafik)
Als Argumente werden genannt, daß es heute mehr Schiffahrt als je zuvor gibt, wobei die Schiffe immer komplexer werden. Die Vorschriften werden immer strenger, die Treibstoffkosten steigen und der Druck auf die Umwelt wird immer größer. Gleichzeitig wird es immer schwieriger, qualifizierte Besatzungen zu finden, die bereit sind, wochenlang auf See zu bleiben. In Verbindung mit den Anforderungen der neuesten Entwicklungen bei Antrieb, Navigation und anderen Bordsystemen, die komplexe interaktive Daten- und Kontrollsysteme erfordern, wird dies eines Tages zu autonomen Schiffen führen, die keine Besatzung mehr benötigen.
Rolls-Royce stellt daher seine neueste Version des Konzepts Ship Intelligence vor, das in zehn Jahren Realität werden könnte. Es basiert auf einer neuen Brücke, dem Future Operator Experience Concept (o. oX), bei der die Brückenpositionen zu intelligenten Arbeitsplätzen werden und die Brücke selbst zu einem Augmented-Reality-Kontrollzentrum. Dabei ist oX mehr als ein Autopilot oder ein Datenanzeigegerät, sondern so konzipiert, daß es mit Flotten von Schiffen und anderen Einrichtungen zusammenarbeitet, die mit Kontrollzentren an Land koordiniert werden und große Datenmengen austauschen.
Neben der neuen Version des oX veröffentlicht Rolls-Royce auch eine Reihe neuer Bilder von möglichen Roboterschiffen der Zukunft, darunter ein Erdgastanker mit einem gekrümmten Walheck ohne die Andeutung eines Decks, ein Frachtcontainerschiff, das nur aus Ladung und keinen Aufbauten besteht, sowie ein Massengutfrachter mit einem flachen Deck, das ausschließlich aus Ladeluken besteht.
Im Juni 2016 stellt die AAWA auf dem Autonomous Ship Technology Symposium in Amsterdam ein 88-seitiges, im Netz aufrufbares Weißbuch mit dem Titel ,Remote and Autonomous Ships - The next steps’ vor, in dem skizziert wird, wie solche autonomen Schiffe aussehen könnten und welche Hürden noch vor ihrem Einsatz auf offener See stehen. Das Weißbuch wurde von Rolls-Royce in Zusammenarbeit mit FinFerries, ESL Shipping, der Technischen Universität Tampere und Brighthouse Intelligence verfaßt.
Die wichtigste Unterstützung für autonome Schiffe wäre demnach eine Reihe von Kontrollzentren an Land, die über Satellit und Landkommunikation mit dem Schiff verbunden sind. Rolls-Royce testet die Technik bereits in Finnland an einer Fähre von FinFerries, worüber im Schwerpunkt der Elektro- und Hybridfähren berichtet wurde. Eine interessante Bemerkung: Fliegende Drohnen sollen den Zustand der autonomen Schiffe jederzeit scannen und bei Bedarf kleinere Reparaturen durchführen.
Dem aktuellen Zeitplan zufolge soll das erste Containerschiff mit einer nur kleinen Crew bereits 2020 unterwegs sein. 2025 könnte das erste völlig unbemannte und ferngesteuerte Schiff folgen, das sich allerdings nur in Küstennähe aufhält. Ab 2035 sollen dann autonom fahrende Schiffe auch auf den Ozeanen unterwegs sein.
Hierzu die Bemerkung: Obwohl 80 - 90 % des Welthandels über das Meer transportiert werden und rund 55.000 (andere Quellen: 64.000; 80.000) Handelsschiffe auf See unterwegs sind, bietet kein Telekom-Unternehmen Internet auf den Weltmeeren in der Qualität an, wie sie an Land üblich ist. Es ist fraglich, ob sich eine Firma findet, die für diesen relativ kleinen Kundenstamm ein Datennetz aufbaut, das zwei Drittel der Planetenoberfläche abdecken müßte.
Im November 2016 kündigen Rolls-Royce und das VTT eine strategische Partnerschaft an, deren Ziel die Entwicklung, das Testen und die Validierung der ersten Generation ferngesteuerter und autonomer Schiffe ist (,smart ships’), mit Fokus auf Datenanalyse, Simulation, 5G-Kommunikation und KI-Steuerung. Hierbei sollen auch die Ergebnisse aus früheren Projekten wie AAWA genutzt werden.

(Grafik)
Über ein autonomes, elektrisches Patrouillenboot, das 100 Tage nonstop Seegebiete überwachen, U-Boote aufspüren und Seeminen suchen soll, wird im September 2017 berichtet. Um autonom fahren zu können, braucht das Schiff einiges an Technologie – darunter verschiedene Radare, hochauflösende Kameras, Wärmebildverfahren sowie Abstands- und Geschwindigkeitsmessungen per Laser. Auf welche Kombination Rolls-Royce setzt, ist bislang unbekannt.
Das erste Konzept sieht zwei 4 MW Aggregate vor, die einen 1,5 MW Antrieb versorgen, bei späteren Entwürfen könnten kleine Gasturbinen eingesetzt werden, um die Zuverlässigkeit zu erhöhen - oder es kommen zwei 1,5 MW Elektromotoren zum Einsatz, die das 60 m lange und rund 700 Tonnen schwere Schiff auf eine Höchstgeschwindigkeit von 25 Knoten (46 km/h) beschleunigen. Hier soll die Energie durch eine 3 MWh Akkuanlage geliefert werden, die sich während der Fahrt über Solarpaneele auflädt.
Azipull-Strahlruder und ein am Bug montiertes Tunnelstrahlruder würden die Manövrierfähigkeit des Schiffes verbessern, dessen Reichweite mit knapp 650 km angegeben wird. Und auch hier sind Drohnen mit an Bord, die von einer Plattform zu Aufklärungsflügen ausschwärmen können. Den Befehl dazu erhalten sie von der Steuerungszentrale an Land.
Im Januar 2018 eröffnet Rolls-Royce im finnischen Turku ein R&D-Zentrum für autonome Schiffe, das u.a. durch die Finnish Funding Agency for Innovation (Tekes) finanziert wird. Bereits im März testet das Unternehmen gemeinsam mit FinFerries die „weltweit erste vollautonome Fähre“ im Turku-Archipel. Die über 400 Stunden lang dauernden Seetests umfassen auch das Autodocking und die Kollisionsvermeidung. Die Falco ist eine 53,8 m lange, doppelendige Autofähre, die 1993 in Dienst gestellt wurde und mit Rolls-Royce-Azimut-Thrusters ausgestattet ist.

Im August 2018 folgt die Meldung, daß Rolls-Royce im Folgejahr mit SAVe Energy ein flüssigkeitsgekühltes Lithium-Ionen-Energiespeichersystem auf den Markt bringen wird, das 10 -18 MWh für größere Schiffe, wie Fähren, Kreuzfahrtschiffe und Mehrzweckschiffe liefern kann. Das modulare Design erlaubt eine Skalierung des Produkts nach dem entsprechenden Strombedarf. Die Produktentwicklung erfolgte teilweise mit Finanzierung des Norwegischen Forschungsrats im Rahmen des ENERGIX-Programms, das die Reeder Color Line, Norled und die Reederei Norwegian Coastal Administration umfaßt.
Nur einen Monat später kündigt Rolls-Royce an, daß ab 2020 eine Reihe von vollständig integrierten MTU-Hybrid-Schiffsantrieben auf den Markt gebracht werden sollen, die für Yachten, Arbeitsboote, Fähren und Patrouillenboote in einem Leistungsbereich von rund 1 - 4 MW pro Antriebsstrang zur Verfügung stehen. Die Erprobung des neuen Hybridsystems in einer Yacht ist bereits für 2019 geplant.
Im Oktober wird zudem eine Zusammenarbeit mit Intel bekanntgegeben, um die Entwicklung der autonomen Schiffahrtssysteme zu beschleunigen und den Betrieb sicherer und effizienter zu machen. Rolls-Royce arbeitet seit 2014 auch mit der Europäischen Weltraumorganisation (ESA) zusammen, um Satellitensysteme für die Kommunikation von Schiff zu Schiff zu entwickeln, und hat inzwischen mit der Erprobung des Intelligent Awareness (IA)-Systems an Bord einer 165 m langen Passagierfähre in japanischen Gewässern begonnen.
Als Meilenstein gilt eine Demonstrationsfahrt der Falco im Dezember 2018 mit 80 VIP-Gästen an Bord, die bei stürmischem Wetter auf der ca. 10 – 12 km weiten Route Parainen - Nauvo erfolgt. Dabei erfolgt eine vollständig autonome Hinfahrt ohne menschliche Intervention, während die Rückfahrt vom 50 km entfernten Landkontrollzentrum in Turku ferngesteuert wird. Die Falco markiert damit den Übergang von Simulationen zu realer Passagier-Autonomie.
Weiter mit den Elektro- und Solarschiffen...