Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und Solarschiffe (X)
2015
Die Jahresübersicht 2015 beginnt mit der Savannah,
die als „erste Hybrid-Superyacht der Welt“ bezeichnet wird.

Das Ende Januar vom Stapel gelaufene Schiff der holländischen Werft Feadship De Voogt Naval Architects war im Laufe von drei Jahren mit einem Aufbau aus Glas, polierten Edelstahlstreifen, Aluminiumstützen und Teakholz ausgestattet worden. Die 83,5 m lange Yacht bietet Platz für den Eigner und zehn Gäste, die von 22 - 26 Besatzungsmitgliedern versorgt werden. Das Schiff steht nun für gelegentliche Charter zur Verfügung.
Die wirkliche Premiere und Grund für ihre Erwähnung ist jedoch der umweltfreundliche Antrieb, denn die Savannah wird von einem 4-Takt-Motor angetrieben, der 1.800 kW in drei Generatoren pumpt, die wiederum Lithium-Ionen-Batterien für den Betrieb der elektrisch betriebenen Schrauben aufladen. Diese bestehen aus einer einzigen zentralen Propellergondel und einem im Windschatten angeordneten Inline-Azimutstrahlruder.
Diese Anordnung, die laut Feadship noch nie zuvor in einer Yacht installiert wurde, ermöglicht ruhiges Fahren bei niedrigen Geschwindigkeiten im vollelektrischen Batteriebetrieb und zusätzliche Geschwindigkeit bei Fahrt im Diesel-Elektrobetrieb mit geringerer Belastung der Motoren. Damit verbunden ist eine Treibstoffersparnis von 30 %.
Ebenfalls im Januar 2015 wird auf der Boot Düsseldorf mit dem Prototyp des Lampuga-Boards „das schnellste Elektro-Surfboard der Welt“ vorgestellt, das eine Geschwindigkeit von bis zu 55 km/h erreicht. Das Modell Lampuga Boost GTA soll sogar 61 km/h schaffen.

Das leichte Gerät der Lampuga GmbH aus Rastatt besteht aus einer Kohlefaser-/Verbundkonstruktion und nutzt das E-Surfboard-Format eines Elektroantriebs, der am Heck einen wasserspeienden Schub ausstößt. Der 15 PS Antrieb wird von einem Lithium-Ionen-Akku angetrieben, der eine Laufzeit von 20 - 35 Minuten und eine Reichweite von bis zu 20 km bietet.
Das Board, das über einen fest verdrahteten Drehgashebel gesteuert wird, ist 2,6 m lang und wiegt 39 kg. Der Motor ist in die Struktur des Boards integriert und muß nicht gewartet werden. Der Preis von 12.940 € für die Standardversion, bzw. 15.400 € für eine schickere Ausführung aus Carbon, wird allerdings als exorbitant bezeichnet, auch wenn darin Ladegerät, Tragetasche, Zubehörtasche und ein Wartungskit enthalten sind.
Im Juli 2016 folgt mit dem Lampuga Air ein aufblasbares Surfbrett mit Jet-Antrieb, das sich klein verpacken und mit 47 km/h fahren läßt. Das modulare Design ermöglicht es, den elektrischen Antrieb mit Motor, Akku und anderen Komponenten als eigenes Modul namens Jet Drive Box zwischen vier verschiedenen Rumpfformen auszutauschen - von einem kurzen Board mit Liegefläche namens Buddy bis hin zu dem extra großen Shuttle mit 2 m Länge. Zusätzlich hat Lampuga das 2,8 m lange Modell Rescue für Rettungsschwimmer entwickelt.

mit Jet Drive Box
Das Air läßt sich dadurch in ein zweiteiliges Paket verpacken, das leicht in einen Kofferraum paßt und keinen Dachgepäckträger oder Anhänger benötigt. Der Jet-Antrieb des 32 kg schweren Surfbretts hat einen 15 PS Motor und eine Fahrzeit von 40 Minuten. Die Höchstgeschwindigkeit wird mit 47 km/h angegeben. Das Air kostet 9.900 €, das Rescue-Modell hat denselben Preis, und die drei Freizeitrümpfe liegen ohne Jet-Antrieb zwischen 750 € für das Buddy und 1.950 € für das Shuttle.
Interessant ist, daß als Hersteller der Marke Lampuga nun die 2011 gegründete Hamburger Firma Sashay GmbH genannt wird, welche den Namen Lampuga und die Lizenzrechte erworben hatte - aber bereits im Juni 2017 in Liquidation geht. Und nachdem im Februar 2018 noch das 2,56 m lange und 0,80 m breite Kohlefaser-Modell Boost auf den Markt gekommen ist, das mit einem 10 kW Elektromotor eine Höchstgeschwindigkeit von 58 km/h erreicht und 19.990 € kostet, stellt im Jahr 2025 auch die ursprüngliche Lampuga GmbH ihren Betrieb ein.
Im Februar 2015 nimmt
auf dem größten Gletschersee Spaniens, dem Lago de Sanabria in Zamora,
der „weltweit erste ausschließlich
mit Wind- und Solarenergie betriebene Katamaran“ seinen Betrieb
auf. Der mit modernster Technologie ausgestattete Helios-Sanabria (o.
Helios Cousteau) ist ein Projekt der Internationalen
Biologischen Station (EBI) und gehört zum Europäischen
Netz der Beobachtungsstellen für die aquatische Biodiversität.

Die Arbeit daran hatte 2009 begonnen, und nach einigen Jahren und über 1 Mio. € ist das Ergebnis ein 20 m langes und 6 m breites Boot mit einer Kapazität für 80 Personen, das eine Geschwindigkeit von 10 Knoten erreicht und eine Reichweite von 24 Stunden hat. Die Stromversorgung übernehmen vier Kleinst-Windräder, 20 grüne, halbtransparente PV-Module mit kristallinen Silizium-Solarzellen der Firma Onyx Solar, die nahtlos in die Struktur des Katamarans integriert sind, sowie einige Lithiumbatterien. Nähere technische Details sind aber nicht zu finden.
Das Boot wird für nun didaktische und touristische Fahrten eingesetzt, um Nachhaltigkeit und Umweltbewußtsein zu fördern, und bietet die Möglichkeit, den 3,48 km2 großen See völlig geräuschlos zu umrunden - die Motoren befinden sich in einer Isolierkammer - und an bestimmten Stellen auszusteigen, ohne andere Infrastrukturen nutzen zu müssen. Es verfügt über einen Aufzug im Heckbereich, um das Tauchen in das 51 m tiefe Wasser und den Zugang für Personen mit eingeschränkter Mobilität zu erleichtern. Zudem gibt es große Bildschirme, auf denen die Besucher die mit hochauflösenden Kameras ausgestatteten Taucher begleiten können, sowie ein kleines Labor, in dem Proben des abgelagerten Schlicks analysiert werden.
Ebenfalls im Februar 2015 starten die Partner des
EU-Projekts MUNIN (Maritime Unmanned Navigation through
Intelligence in Networks) einen Test in Norwegen, der letztlich zu
einer unbemannten Navigation auf dem Meer mit Hilfe von intelligenten
Datennetzwerken führen soll. Die Ergebnisse von MUNIN sollen zur Nachhaltigkeit
der europäischen Schiffahrt beitragen, sowohl in finanzieller und
ökologischer als auch in sozialer Hinsicht.
Beteiligt sind an dem im September 2012 begonnenen Projekt acht Institutionen aus fünf Ländern, darunter aus Deutschland das Fraunhofer-Center für Maritime Logistik und Dienstleistungen (CML), das die Leitung hat, die Fachhochschule Wismar sowie die Firma MarineSoft; aus Norwegen das Forschungsunternehmen MARINTEK und die aptomar AS; aus Schweden die Chalmers University; aus Island die Marorka ehf und aus Irland das University College Cork.
Die Aufgaben liegen in der theoretischen Analyse des Themas ,Autonome Seeschiffahrt’ und der Entwicklung praktischer Lösungsansätze, die gemeinsam die Umsetzung eines autonom fahrenden Schiffes möglich machen sollen. Insgesamt liegt der Schwerpunkt in der Entwicklung eines Massengutfrachters mit autonomen Entscheidungssystemen an Bord, die jedoch von landbasierten Kontrollstationen aus fernüberwacht werden.
Nach dem Test der Interaktion zwischen bemannten und unbemannten Schiffen, bei dem auf einem engen Seegebiet 40 Frachtschiffe fahren und mittendrin ein Schiff ohne Besatzung unterwegs ist, wird MUNIN Ende August 2015 abgeschlossen. Ein bescheidenes Video mit dem Titel ,MUNIN In situ test’ (04:21) wird erst im November 2024 hochgeladen - im Laufe eines ganzen Jahres aber nur 30 Mal abgerufen. Einen ähnlich minimalistischen Effekt scheint auch das Projekt selbst gehabt zu haben. Wohlgemerkt: Dessen Gesamtbudget lag bei über 3,8 Mio. €, wobei der Finanzierungsanteil durch die EU 2,9 Mio. € betrug.
Im Juni 2016 wird gemeldet, daß das CML in Hamburg-Harburg einen 20 Mio. € teuren Forschungsneubau für unbemannte Schiffahrt erhalten wird. Mit dem Bau soll 2019 begonnen werden, die Fertigstellung ist für 2021 geplant. Die Kosten werden zur Hälfte von der EU und zu je einem Viertel vom Bund und von der Hansestadt übernommen.
Auch eine neue, unbemannte amphibische Drohne erscheint im Februar 2015 erstmals in den Blogs. Die stabilisierte Kugel kann flußaufwärts schwimmen oder bergauf rollen und ist in der Lage, schwieriges Gelände zu Lande und zu Wasser zu bewältigen, darunter auch Sand, Schnee und schräge Oberflächen. Das Highly Adaptive Robotic Vehicle (HARV) wurde ursprünglich um 2009 im Rahmen eines Projekts der schwedischen Raumfahrtbehörde und der Universität Uppsala für eine Weltraummission auf dem Mars konzipiert.

Die 2012 gegründete Firma GuardBot Inc. aus Stamford, Connecticut, entwickelt das HARV in Zusammenarbeit mit dem United States Marine Corps weiter zu einer amphibischen Drohne und besitzt inzwischen eine exklusive Lizenz für die durch mehrere US- und ausländische Patente geschützte Technologie. Schöpfer des GuardBot ist Peter Muhlrad, der etwa sieben Jahre für die Entwicklung brauchte. Jetzt, nachdem er fertig ist, kann der Roboter in verschiedenen Größen produziert werden, von 10 cm bis hin zu einem Modell mit einem Durchmesser von 3 m (andere Quellen: 3,5 m), das bis zu 100.000 $ kosten soll.
Mit Hilfe der Neun-Achsen-Stabilisierung und eines Pendelantriebssystems bewegt sich der Roboterball durch Hin- und Herverlagerung des Schwerpunkts und einer Vielzahl von Lenk-Algorithmen vorwärts. Und dank seiner 360°-Fähigkeiten kann er sich buchstäblich auf der Stelle drehen und wenden. Das kugelförmige Design ermöglicht eine reibungsarme und nahezu geräuschlose Bewegung.
Die installierte Batterie kann im Stillstand 45 Stunden lang halten bzw. das Antriebssystem mit einer Ladung bis zu 25 Stunden lang versorgen. Dabei erreicht der GuardBot zu Lande eine Geschwindigkeit von bis zu 14,4 km/h und im Wasser 4,9 km/h. Das derzeitige Design verfügt über zwei Ladebuchten und soll für militärische, innere Sicherheit und kommerzielle Anwendungen eingesetzt werden. Hierfür ist der Roboter mit zwei Kameras, Mikrofonen und GPS ausgestattet und wird über Satellit ferngesteuert.

In den Berichten wird von einer Präsentation auf der Navy-Basis Quantico in Virginia im Jahr 2012 sowie von einem Test im Januar 2014 auf der Naval Amphibious Base in Little Creek, Virginia, gesprochen, bei dem sich der GuardBot erfolgreich von einem Marineschiff absetzt und zu ihm zurückkehrt. Im April 2017 wird das auch Spherical Platform for AEODRS Appliance Research (SPAAR) genannte System mit einem Durchmesser von gut 24 cm erfolgreich vor Navy-Offizieren in Indian Head, Maryland, vorgeführt. Allerdings wird im Juni 2018 berichtet, daß sich der GuardBot noch immer in der Entwicklung befindet.
Einen Schritt weiter geht es im Februar 2020, als sich die GuardBot mit dem ebenfalls in Connecticut ansässigen Drohnenunternehmen Aquiline Drones mit dem Ziel zusammenschließt, unbemannte Luftfahrzeuge (UAVs) mit unbemannten Boden- bzw. Wasserfahrzeugen zu koppeln und ihre Fähigkeiten zur Lösung komplexer Probleme zu kombinieren. Im Rahmen der Partnerschaft werden die Luftfahrzeuge von Aquiline über Cloud-basierte Sender mit den GuardBots kommunizieren und so ein nahtloses unbemanntes System bilden, das bei Problemen wie Bränden, Diebstahl, Vandalismus und gewalttätigen Angriffen zusammenarbeitet.
Die erste Charge der GuardBots soll nun ab Mai in der Aquiline-Anlage in Hartford hergestellt werden, was sich aber nicht bestätigen läßt. Später kommt noch ein landgestütztes Modell namens Rollerbot hinzu, doch über reale Verkäufe und Einsätze läßt sich bislang nichts finden.

Monte Carlo Cup 2014
Im Juni 2015 findet in Monaco das zweite internationale Solarbootrennen Solar1 Monte Carlo Cup statt, an dem diesmal 25 Studententeams mit insgesamt fast 300 Teammitgliedern aus einem Dutzend Ländern teilnehmen, darunter die Niederlande, Polen, Italien, die USA, Deutschland, Belgien, die Türkei und Brasilien. Diesmal sind Boote in zwei Kategorien eingeteilt: A-Klasse mit einer maximalen Länge von 6 m und vier Solarmodulen sowie Offene Klasse. Die Gewinner des Vorjahres in den beiden Kategorien behalten ihre Titel.
Die Niederlande haben die meisten Boote im Wettbewerb, von denen eines eine Geschwindigkeit von 42 km/h erreicht, gefolgt von Polen. Nächstes Jahr soll die Veranstaltung noch größer werden, mit mehr internationalen Teams, höheren Geschwindigkeiten, härteren Rennen und mehr technologischen Fortschritten.
Ebenfalls im Juni 2015 zeigen die Blogs den TTRobotix Seawolf, den man auch als Tauchhülle für eine GoPro-Kamera bezeichnen kann. Dabei hat die GoPro des Benutzers in einem durchsichtigen Acryl-Nasenkonus Platz, der in den hochschlagfesten ABS-Rumpf eingebaut ist. Die TTRobotix ist eine neu etablierte Sparte der taiwanesischen Firma Thunder Tiger, um ein Produktportfolio im Bereich unbemannter Fahrzeuge wie UAVs und ROVs zu schaffen.

Der 7,7 kg schwere Seawolf verwendet ein pumpenbetriebenes Ballastsystem, um statische Tauchgänge durchzuführen. Damit kann er auf der Stelle auf- und abtauchen, im Gegensatz zu dynamischen Tauchbooten, die sich vorwärts bewegen müssen, um auf- oder abzutauchen, da sie sich auf die hydrodynamische Kraft des Wassers verlassen, das über ihre flügelartigen Tauchflächen fließt. Die maximale Vorwärtsgeschwindigkeit des Seawolf beträgt 1,8 Knoten (3,3 km/h), die maximale Tuchtiefe 10 m, und der 5.000 mAh Akku soll für 50 Minuten Betrieb ausreichen.
Um Befehle von der Fernsteuerungseinheit zu empfangen und Echtzeit-Videos von der GoPro an einen 8-Zoll-LCD-Bildschirm an Land zu übertragen, verwendet das Modell F13 ein 30 m langes Kabel zwischen U-Boot und Land. Die Modelle F11 und F12 verwenden stattdessen ein 10 m langes Kabel, das vom U-Boot zu einem Wi-Fi-Sender führt, der sich in einer an der Oberfläche schwimmenden Boje befindet. Die Preise für den Seawolf sollen bei 999 $ beginnen, die Verfügbarkeit wird für August erwartet.

Bei der Recherche stellte sich heraus, daß die Thunder Tiger bereits Ende 2009 einen Vorläufer namens Neptune SB-1 auf den Markt gebracht hatte, ein ferngesteuertes U-Boot, in dessen durchsichtiger Nase eine optionale Mini-Videokamera installiert werden kann. Es verfügt über ein 15 m langes Videokabel, das an einen ebenfalls optionalen tragbaren LCD-Monitor angeschlossen wird, um die Tauchfahrten in Echtzeit zu verfolgen.
Auch das SB-1 verwendet ein dynamisches Tauchsystem. Es hat eine maximale Betriebstiefe von 5 m, kann aber bis zu 10 m tief tauchen, ohne Schaden zu nehmen. Der empfohlene Verkaufspreis liegt bei 700 $, obwohl die meisten Online-Händler es für etwa 570 $ anbieten. Inzwischen sind die Produkte allerdings alle ausverkauft, Nachfolger scheint es nicht zu geben.
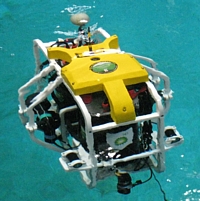
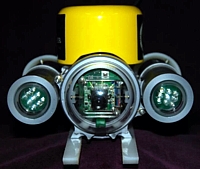
Neben solchen kleinen Tauchgeräten gibt es natürlich auch große, professionelle Exemplare. Einige der ferngesteuerten unbemannten Unterwasserfahrzeuge (remotely operated vehicles, ROVs), die häufig auch Rover genannt werden, sind bereits in der vorangegangenen Übersicht der Glider und U-Boote kurz erwähnt worden.
Nun soll ein Rückblick auf die anfänglichen Aktivitäten auf diesem Sektor den Schwerpunkt dieser Jahresübersicht einleiten, der neben den professionellen ROVs auch die vielen kleinen Modelle umfaßt, die zwar auf den Konsumentenmarkt zielen, aber ebenso elektrisch angetrieben werden und auf den gleichen Technologien aufbauen. Daneben werden auch einige autonome Unterwasserfahrzeuge (autonomus unterwater vehicles, AUVs) präsentiert, die mehr im Bereich von Forschung und Überwachung zum Einsatz kommen. Pionierarbeit bei der Entwicklung von Fahrzeugen, die in der Lage waren, verlorene Ausrüstung zu bergen und Inspektionen in der Tiefsee durchzuführen, leistete die US Navy schon in den 1950er Jahren.

Sea-Link I
Zu den frühesten Rovern zählen die Deep-Submergence-Vehicles (DSV)
Johnson Sea-Link I und II, die bereits 1971 bzw. 1972 von
der Harbor Branch Oceanographic Institution entworfen,
gebaut und in Betrieb genommen wurden. Die für die Forschung bestimmten
Fahrzeuge sind für eine maximale Betriebstiefe von 2.344 m zertifiziert
und führen im Laufe der Zeit über 7.000 Tauchgänge durch. Daneben
gibt es noch militärisch motivierte DSVs. Bis Ende der 1970er Jahre
werden aber praktisch alle DSVs durch ROVs ersetzt.
Um wissenschaftliche und verteidigungspolitische Ziele zu erreichen, bauen die vier Nationen Frankreich, Japan, Russland und die Vereinigten Staaten jedoch auch in den 1980er Jahren DSVs, die in Tiefen bis zu 6.500 m eingesetzt werden und bemannt sind: Das französische Forschungsinstitut Ifremer (Institut français de recherche pour l’exploitation de la mer) entwickelt und baut das Tauchboot Nautile, das in der Übersicht 2014 beschrieben ist; das japanische Shinkai 6500 läuft 1989 vom Stapel; die Russische Akademie der Wissenschaften erwirbt zwei in Finnland gebaute Tauchboote der MIR-Klasse; und die US Navy entwickelt das Sea Cliff als eines von fünf DSVs für tiefere Tauchgänge. Alle diese Fahrzeuge sollen auch heute noch in Betrieb sein.
Außerdem beginnt in den 1970ern die Entwicklung autonomer Unterwasserfahrzeuge (AUVs), wie die beiden Exemplare der University of Washington namens Spurv und Uars, die erfolgreich ozeanografische Daten sammeln, auch unter dem Eis, oder das erste Tieftauch-AUV, die französische Epaulard, die mehr als 500 Tauchgänge durchführt, viele davon in eine Tiefe von 6.000 m. Die wenigen AUVs, die in den 1980er Jahren gebaut werden, sind hingegen meist Versuchsfahrzeuge.
Im Rahmen eines gemeinsamen Programms der Defense Advanced Research Agency (DARPA) und der US Navy wird 1988 das Projekt Unmanned Undersea Vehicle ins Leben gerufen, das zeigen soll, daß AUVs die besonderen Anforderungen der Marine erfüllen können. Aus dem Projekt gehen zwei vom Charles Stark Draper Laboratory entworfene und gebaute Testfahrzeuge mit mittlerer Tauchtiefe hervor, UUV I und II. Später liegt der Schwerpunkt des Projekts auf Brennstoffzellen, akustischer Kommunikation und genaueren Navigationssystemen.
Die zunehmende Nützlichkeit und Zuverlässigkeit von ROVs bei Offshore-Einsätzen führt Anfang der 1990er Jahre zu einer breiten Akzeptanz dieser Art von Fahrzeugplattform, wie z.B. zur Forschung oder bei der Inspektion und Wartung von Unterwasser-Kommunikationskabeln. Besonders das Vereinigte Königreich, Frankreich und Norwegen unterstützen die Forschung und Entwicklung in diesem Bereich, vor allem aufgrund der Notwendigkeit, die Fischerei zu bewirtschaften und Offshore-Öl- und Gasquellen zu erschließen.

Ein gutes Beispiel für die Reichweite und Komplexität eines ROV ist die 1993 vom Japan Marine Science and Technology Center (JAMSTEC) entwickelte Kaikō, die im März 1995 im Challenger Deep im Marianengraben bis auf 11.033 m tauchte. Das allgemeine Ziel des japanischen Programms besteht darin, die Struktur der Erdkruste und die Ressourcen des Meeresbodens zu verstehen.
Nachdem das 3 m lange, 10,6 Tonnen schwere und mit Lithium-Ionen-Batterien angetriebene ROV mehr als 250 erfolgreiche Tauchgänge durchgeführt hat, geht es Ende Mai 2003 während des Taifuns Chan-Hom vor der Küste der Insel Shikoku auf See verloren, als ein sekundäres Kabel reißt, das es mit seiner Startrampe an der Meeresoberfläche verbindet.
Ein 100-seitiger Bericht über diese Anfänge, aus dem viele der oben
aufgeführten Informationen bezogen wurden, stammt von der National
Academies of Sciences, Engineering, and Medicine aus dem Jahr 1996 und
trägt den Titel ,Undersea Vehicles and National Needs’. Er ist im
Netz einsehbar, befaßt sich allerdings nicht mit den kleinen verbraucherorientierten
ROVs.

Bereits 1983 bildet die Einführung des MiniROVER (o. Mini Rover ROV) einen wichtigen Meilenstein, da das kostengünstige Unterwasserfahrzeug die maritime Industrie revolutioniert und zu einem der meistverkauften ROV-Systeme wird. Das Gerät kommt zu einem Preis von 26.850 $ auf den Markt, während das nächstgünstige ROV etwa 100.000 $ kostet.
Das kleine, selbstfahrende und frei schwimmende Fahrzeug ist von Chris Nicholson und seiner 1982 in Falmouth, Massachusetts, gegründeten Deep Sea Systems International Inc. (DSSI) entworfen und gebaut worden. Es ist 66 cm lang und wiegt 25 kg, so daß es in Flugzeugen als Gepäck mitgenommen und schnell überall auf der Welt in Notfallsituationen eingesetzt werden kann.
Im Jahr 1987 erwirbt die 1962 von dem Wissenschaftler und Erfinder Sam Raymond gegründete Firma Benthos Inc. (Teledyne Benthos) die exklusiven Design-, Marken-, Marketing- und Herstellungsrechte des MiniRover. Die Benthos, die uns bereits bei den Glidern begegnet ist, hatte das Gerät schon seit 1984 für die DSSI hergestellt und gewartet.

Explorer
Neben ihrer praktisch-technischen Rolle dienen die Mini Rover MKII ROVs übrigens auch als ,Big Geek’ und ,Little Geek’ in James Camerons Science-Fiction-Film The Abyss von 1989.
Die DSSI wiederum wird 1994 von der Oceaneering International Inc. übernommen, die 1969 entstand und ebenfalls auf dem ROV-Markt tätig ist und mit ihrem Global Explorer ROV bekannt wird.
Dieser führt im Rahmen von Wissenschafts- und Vermessungsexpeditionen für National Geographic, die National Oceanographic and Atmospheric Administration (NOAA) und andere Forschungsorganisationen zahlreiche Tauchgänge in Tiefen unter 2.700 m durch, so z.B. 2001 und 2003 bei den von Robert Rines organisierten Suchen nach dem Ungeheuer von Loch Ness.
Spätere ROVs der Firma tragen die Namen NEXXUS, Magnum Plus und Millennium Plus.
Forscher des Robotics Innovation Center (RIC) am Deutschen Forschungszentrum für Künstliche Intelligenz GmbH (DFKI) in Bremen entwickeln von 2007 bis 2009 zusammen mit Studenten der Universität Bremen das AUV AVALON (Autonomous Vehicle for Aquatic Learning, Operation and Navigation), das speziell für enge, hindernisreiche Gewässer geeignet ist und eine Tauchtiefe von bis zu 150 m erreicht.

Die Wissenschaftler unter Leitung von Prof. Frank Kirchner entwickeln mobile Robotersysteme, die an Land, zu Wasser, in der Luft und im Weltraum für komplexe Aufgaben eingesetzt werden. Auch über das Projekt Europa-Explorer (EurEx), bei dem es darum geht, den Jupitermond Europa durch AUVs zu erforschen, wurde bereits unter den Gleitern berichtet.
Das AUV AVALON ist etwa 1,35 m lang, hat einen Durchmesser von 24,6 cm und ein Gewicht von rund 60 kg. Angetrieben wird es von sechs SeaBotix-Thrustern, was eine hohe Manövrierfähigkeit sowie eine maximale Geschwindigkeit von rund 2 m/s ermöglicht. Die Lithium-Ionen-Batterien gewährleisten einen dauerhaft autonomen Betrieb für Missionszeiten von mehreren Stunden. Das AUV wird übrigens 2014 Sieger der Student Autonomous Underwater Challenge – Europe (SAUC-E).
Im Rahmen des Projekts CUSLAM (Confined Underwater Simultaneous Localization and Mapping), das vom September 2009 bis zum Juli 2012 läuft und vom Bundesministerium für Wirtschaft und Technologie gefördert wird, entwickelt das DFKI einen robusten Algorithmus zur Selbstlokalisierung und Kartenerstellung in komplexen, räumlich eingeschränkten Unterwasserumgebungen, der es auch kleinen, schwach instrumentierten Fahrzeugen erlaubt, in schwierigen Umgebungen autonom verläßliche Aufgaben zu erfüllen.

Die entsprechenden Versuchsreihen werden mit dem ebenfalls am DFKI entwickelten und gebauten AUV Dagon durchgeführt, das mit zusätzlichen speziellen, hochauflösenden Meßinstrumenten ausgestattet ist und nach seinem ersten Einsatz Anfang 2010 auch in verschiedenen anderen Forschungsprojekten als Experimentierplattform verwendet und kontinuierlich weiterentwickelt wird.
Das neue AUV hat die Maße 110 x 80 x 40 cm, wiegt 75 kg und wird von einem 1,6 kWh Li-lonen-Akku und sechs 150W Schubdüsen angetrieben. Die maximale Tauchtiefe beträgt 150 m. Ein Einsatzbeispiel ist das EU-geförderte Projekt ScienceROV im Jahr 2013, das die Evaluierung von optischen Lokalisierungsverfahren von ROVs in Fischkäfigen der Aquakulturindustrie zum Inhalt hat.
Im Vorgriff auf die Chronologie: Wie im Januar 2022 berichtet wird, entwickelt das DFKI auch innovative KI-Technologien zur Munitionsbergung durch autonome Roboter. Das Motiv ist klar: Am Grund der nordeuropäischen Gewässer lagern über 1,6 Mio. Tonnen Munitionsaltlasten, die während und nach den zwei Weltkriegen versenkt wurden und Mensch und Umwelt bedrohen, da sie rosten, Giftstoffe an die Umwelt abgeben und das Risiko bergen, unkontrolliert zu detonieren. Bisher wird die Munition von ausgebildeten Tauchenden geborgen - eine aufwendige, viel Zeit erfordernde und auch äußerst riskante Tätigkeit.
Unter Leitung von Prof. Frank Kirchner wird in dem Projekt CleanSeas daran gearbeitet, daß diese gefährliche Aufgabe zukünftig von Robotern übernommen wird, die Dank KI in der Lage sind, Kampfmittel unter Wasser selbständig zu erfassen und für den Abtransport vorzubereiten. Um die Forschung auf diesem Gebiet voranzutreiben, fördert das Bundesministerium für Bildung und Forschung (BMBF) das Projekt vom Januar 2023 bis zum Dezember 2025 mit rund 1 Mio. €.

Als robotische Testplattform dient das am DFKI entwickelte AUV Cuttlefish, das über zwei tiefseetaugliche Manipulatorarme zur flexiblen Handhabung von Objekten unter Wasser verfügt, die sich bei Nichtgebrauch in die Unterseite einklappen lassen. Das batteriebetriebene Fahrzeug ist 2,8 m lang, wiegt an Land 1.200 kg, kann in einer Tiefe von bis zu 1.500 m operieren und sich dank seiner acht elektrischen Schubdüsen in jede Richtung bewegen. Außerdem verfügt es über drei Kameras und eine Reihe von LED-Scheinwerfern.
Die Idee ist, daß der Cuttlefish nicht mehr für jeden Einsatz von einem Schiff an der Oberfläche aus eingesetzt werden muß, sondern in einem Unterwasser-Hangar mit Batterieladegerät in der Nähe einer Struktur wie einer Offshore-Ölplattform oder einer Windturbine gelagert wird. Für Routineaufgaben wie die Inspektion dieser Struktur wird er autonom aus seinem Hangar herausfahren und sich die Dinge ansehen, wobei er in horizontaler Ausrichtung bleibt. Geführt wird er von seiner Frontkamera und KI-basierten Algorithmen, die auf seinen Bordcomputern laufen.
Für komplexere Aufgaben, die einen menschlichen Eingriff erfordern, kann jedoch ein Bediener eingreifen und die manuelle Steuerung des Cuttlefish übernehmen. In diesem Fall kommuniziert er mit ihm in Echtzeit über ein Glasfaserkabel, das vom Fahrzeug zu einer Satellitenkommunikationsboje an der Oberfläche führt. Derzeit ist noch nicht bekannt, wann das Cuttlefish AUV kommerziell genutzt werden kann.
Im Februar 2010 melden
Wissenschaftler und Ingenieure der Woods Hole Oceanographic
Institution (WHOI), daß
sie ein optisches Unterwasserkommunikationssystem entwickelt
haben, das sie als „eine virtuelle Revolution in der Hochgeschwindigkeitsdatenerfassung
und -übertragung unter Wasser“ bezeichnen. Bislang benötigen
ROVs Kabel als fest verdrahtete Verbindung, da es die einzige Möglichkeit
zur sofortigen Datenübertragung von und zu Tiefseetauchern darstellt.
Daten können auch mit Hilfe akustischer Techniken durch das Wasser übertragen werden, aber die Übertragung ist relativ langsam und hat eine begrenzte Bandbreite. Funksignale bewegen sich auch nur sehr schlecht durchs Wasser. Das optische System des WHOI verspricht hingegen eine nahezu sofortige Datenübertragung und Echtzeit-Videobilder von ungebundenen ROVs. Das System würde in Verbindung mit der akustischen Kommunikation eingesetzt werden, die übernommen wird, sobald sich die Fahrzeuge außerhalb der optischen Reichweite bewegen.

(Grafik)
Das System würde nicht nur für mehr Bewegungsfreiheit sorgen, sondern auch kleinere und leichtere ROVs ermöglichen, da sie kein schweres Kabel hinter sich herziehen müßten. Und kleinere Tauchboote könnten wiederum kleinere Forschungsschiffe und kleinere Hilfsmannschaften bedeuten. Die Konstrukteure erreichen Datenraten von 10 - 20 MB/s durch 100 m Wassertiefe und setzen das System im Juli erfolgreich ein, um ein ROV zu steuern, das am Juan-de-Fuca-Rücken im Pazifischen Ozean Geräte auf dem Meeresboden installiert.
Im Juli 2012 gibt das WHOI bekannt, daß es sich mit zwei privaten Unternehmen zusammengetan hat, um die Technologien zu vermarkten, die zum einen das Problem der unhandlichen Kommunikationskabel lösen, und zum anderen das Problem von Tiefseewasserproben, die zur Analyse an die Oberfläche geschleppt werden müssen.
Das WHOI arbeitet nun mit dem britischen Unterseekommunikationsunternehmen Sonardyne International zusammen, um die zwischenzeitlich BlueComm genannte Technologie zur Marktreife zu bringen. Das System verwendet Blaulicht-LEDs mit geringem Stromverbrauch in Verbindung mit kleinen, kostengünstigen optischen Sensoren, um kodierte Lichtimpulse durch bis zu 200 m tiefes Wasser zu senden und zu empfangen. Die Datenübertragungsrate wird noch immer mit 10 - 20 MB/s angegeben.
Bei der zweiten Technologie wird zusammen mit dem ozeanographischen Technologieunternehmen McLane Research Laboratories ein Imaging FlowCytobot genanntes Probenahmegerät kommerziell entwickelt, das zwar immer noch an einer Leine in die Tiefe abgelassen wird, aber Phytoplankton und Zooplankton selbständig erkennt, klassifiziert, mißt und fotografiert, während es noch unter Wasser ist. Die Daten werden dann über ein Glasfaserkabel in der Leine zurück zum Begleitschiff übertragen.
Wie im November 2010 berichtet wird, arbeiten Ingenieure des Fraunhofer-Instituts für Optronik, Systemtechnik und Bildauswertung (IOSB) unter der Leitung von Thomas Rauschenbach an einem autonomen Unterwasserfahrzeug, das kostengünstig genug für industrielle Anwendungen wie die Inspektion von Schiffsrümpfen und Dämmen ist und dennoch so unabhängig arbeitet, daß es keinerlei menschliche Steuerung erfordert. Es soll auch kleiner und robuster sein als die Vorgänger und in fast jeder Unterwasserumgebung eingesetzt werden können - ohne über ein Seil mit einem Schiff an der Oberfläche verbunden zu sein und von einem menschlichen Bediener gesteuert zu werden.

des IOSB
Hierzu statten die Forscher des IOSB das AUV sozusagen mit ,Sinnen’ aus. Dank eines Laser-Bildgebungssystems kann es sogar in trübem Wasser sehen. Dabei sendet die an Bord befindliche Kamera Laserimpulse aus, die von Unterwasserobjekten reflektiert werden. Während die Kamera diese Lichtwellen empfängt und verarbeitet, erstellt sie ein Bild ihrer Umgebung. Das Gehör wird wiederum durch hochfrequente Ultraschallwellen erreicht, die ebenfalls an Objekten abprallen und von einem Sensor registriert werden, so daß das AUV auch diese Objekte untersuchen kann.
Ein Steuerprogramm hält das AUV auf Kurs und aus Gefahrenzonen heraus und berücksichtigt dabei auch Unterwasserströmungen. Die druckresistente Elektronik ist in Silikon eingekapselt, ebenso wie die Lithium-Batterien des Fahrzeugs. Ein Prototyp wird bereits in einem Wassertank getestet und für das dritte Quartal 2011 sind erste Tauchgänge in Tiefen von bis zu 6.000 m geplant.
Nur einen Monat später präsentiert die Firma Hawkes Remotes Inc. auf der Konferenz Future of Electric Vehicles im kalifornischen San José eine neue Technologie, die ROVs ebenfalls (fast) von ihrem sperrigen Seil befreit, das neben der Kommunikation auch für die Stromzufuhr zum ROV genutzt wird und dazu führt, daß die meisten dieser Tauchfahrzeuge vom Ausgangspunkt der Leine aus nur etwa 500 m frei schwimmen können.

Spider Optic System
(Grafik)
Das Unternehmen war 2010 als Spin-off der Hawkes Ocean Technologies (HOT) gegründet worden, die seit 1995 unter der Leitung von Graham Hawkes bemannte und unbemannte Unterwasserfahrzeuge entwickelt. Nachdem die Techniker der Firma mehrere ROVs anderer Unternehmen analysiert hatten, darunter ein teures Militärmodell von Saab, das bis zu 12 km weit fahren kann, sowie das wissenschaftliche ROV Nereus der WHOI, das bereits in der letztjährigen Übersicht beschrieben wurde, bemühen sie sich, die Reichweite des Saab mit dem Glasfaserkabel des Nereus zu kombinieren.
Das Ergebnis ist das Spider Optic System, dessen wichtigste Innovation darin besteht, daß die ROV-Fernbedienung ein dünnes und gepanzertes Kabel, das nur wenige Millimeter dick ist, im Fahrzeug selbst besitzt und man das Kabel also nicht mehr von oben herunterzieht, sondern es im Wasser zurückläßt. Das Kabel gibt es sowohl in wiederverwendbaren als auch in dünneren Einwegversionen - und das Unternehmen arbeitet daran, das Einwegkabel biologisch abbaubar zu machen.
Und was die Energie anbelangt: Die kompakten ROVs, die für das System entwickelt wurden, werden von ihren eigenen, an Bord befindlichen 18 kWh Batterien mit Strom versorgt und sind viel schwungvoller unterwegs als ihre angebundenen Brüder, da sie nicht den Widerstand eines langen Kupferkabels überwinden müssen.
Einer der ersten
kleinen Tauchroboter, der mit einem Smartphone oder Tablet gesteuert
werden kann, während er Unterwasseraufnahmen in voller HD-Auflösung
sendet, wird im November 2011 in den
Blogs vorgestellt.

Ähnlich wie bei Rennspielen neigt und dreht man das Eingabegerät, und das HydroView der Firma Aquabotix Corp. aus New Hampshire setzt die Bewegungen um. Mit der kleinen, ferngesteuerten Unterwasserkamera, die knapp 3.000 $ kosten soll, können Bootseigner zum Beispiel den Rumpf ihres Schiffes auf Beschädigungen untersuchen oder den sicheren Sitz des Ankers am Meeresboden kontrollieren.
Das HydroView wird per WLAN über eine Empfangsbox an der Wasseroberfläche gesteuert, die durch ein rund 45 m langes Kabel mit dem Tauchroboter verbunden ist. Optional wird auch eine Verlängerung mit rund 100 m Länge angeboten. Die Beleuchtung übernimmt ein LED-Kranz rund um die Kamera und für den Vortrieb sorgen zwei Impeller. Die maximale Tauchtiefe liegt bei 23 m, die Höchstgeschwindigkeit wird mit 3 Knoten (5,6 km/h) beziffert und die Akkulaufzeit soll rund zwei Stunden betragen, was sich durch einen ebenfalls optionalen Zusatzakku verlängern läßt.
Die Aquabotix will zudem eine Profiversion anbieten, die drei Stunden lang 45 m tief tauchen kann, deren Preis aber noch nicht genannt wird. Tatsächlich kommt 2012 das etwa 4,1 kg schwere ROV HydroView Sport auf den Markt, das sich für Inspektionen und Unterwassererkundungen bis zu einer Tiefe von 45 m eignet und an einem ca. 23 m langen Kabel hängt. Eine zweite Generation, die HydroView Professional Serie mit besseren Steuerungsoptionen, neuen Motor-Konfigurationen und zusätzlichen Sensorpaketen für kommerzielle Anwendungen, wird 2014 vorgestellt und verfügbar gemacht.

Im Dezember 2017 stellt die Aquabotix einen Unterwasserroboter vor, der aus zwei Fahrzeugen in einem besteht: einem ROV, das sich für Aufgaben wie Inspektionen eignet, sowie einem AUV, das besser für Aufgaben wie die Rastersuche geeignet ist. Das neue Integra ist für komplexere Einsätze gedacht und soll in der Berufsschiffahrt, Forschung, Umweltbewertung, Verteidigung und Infrastruktur Anwendung finden.
Bei der Verwendung als ROV wird das Integra an ein Glasfaserkabel angeschlossen, das von ihm zu einer mit Wi-Fi ausgestatteten Kontrollbox an der Küste führt, von wo aus das Fahrzeug dann in Echtzeit vom Bediener über eine browserbasierte App auf dessen Mobilgerät oder Computer gesteuert wird. Um den Integra als AUV zu verwenden, wird das Kabel abgezogen und eine Mission mit einem Windows-basierten Programm vorprogrammiert, so daß sich das Tauchgerät selbständig zu den voreingestellten Wegpunkten begibt und die ihm zugewiesenen Aufgaben ausführt.
Zu den weiteren Merkmalen des 16 kg schweren Integra gehören fünf starke Elektromotoren, eine Lithium-Ionen-Batterie, eine Kamera mit Schwenk- und Neigungssteuerung, LED-Strahler und ein Sensorpaket, das Tiefe, Temperatur, Orientierung und GPS erfaßt. Da das Gerät eine Nutzlastkapazität von 2,3 kg besitzt, läßt es sich auch mit zusätzlichen Sensoren, einschließlich Sonar, ausstatten. Die Betriebsgeschwindigkeit beträgt 2 - 2,5 Knoten, die maximale Geschwindigkeit 5 Knoten.

Es gibt zwei Modelle des 111 cm langen, 37 cm breiten und 46 cm hohen Integra, die bis zu einer maximalen Tiefe von 100 oder 300 m abtauchen können. Ihre Akkulaufzeit beträgt vier bzw. acht Stunden, die genaue Kapazität wird nicht genannt.
Dem Stand von 2025 zufolge scheint die Firma aber nur noch das AUV Endura 100 anzubieten, das in der Standardversion eine Tiefe von 100 m erreicht und dabei von fünf Motoren angetrieben wird, zwei Strahlrudern und drei Schwebe-/Neigungsmotoren mit Propellern. Diese Konfiguration erlaubt die vollständige Kontrolle über Vorwärts-/Rückwärts- und Auf-/Abwärtsbewegungen sowie über Rollen, Neigen, Gieren und Schweben. Die Endura wird mit zwei Lithium-Ionen-Akkus betrieben und kann Geschwindigkeiten von bis zu 5 Knoten vorwärts und 2 Knoten rückwärts erreichen.
Wie im August 2012 berichtet wird, arbeitet ein Forscherteam der Heriot-Watt University in Schottland unter der Leitung von Lea-Anne Henry an einer Lösung zur Rettung von Korallenriffen, sowohl im flachen als auch im tiefen Wasser, bei der ein Schwarm autonomer Roboter eingesetzt werden soll. Bei dem Ansatz, der vom Verhalten natürlicher Insektenschwärme wie Bienen, Wespen und Termiten inspiriert ist, die gemeinsam umfangreiche und komplexe Strukturen aufbauen, würden die Roboter, von denen jeder einzelne nach einfachen Regeln arbeitet, beschädigte Korallenstücke wieder zusammensetzen, damit sie nachwachsen können.
Die Initiative war im Vorjahr von Sir David Attenborough und seiner Organisation Lophelia.org ausgegangen, deren Hauptziel es ist, die Korallenriffe zu bewahren, welche durch die negativen Auswirkungen der Grundfischerei bedroht sind. Die Wissenschaftler haben daraufhin Schwarm- und Suchtalgorithmen entwickelt und verschiedene Unterwasserroboter auf ihre Eignung als CoralBots getestet.
Bislang unterstützen freiwillige Taucher den Prozeß des Nachwachsens, der ohne Hilfe viele Jahrzehnte bis Jahrhunderte dauern kann. Die Methode, die Korallenfragmente am Riffgerüst von Hand wieder zusammensetzen, ist jedoch nur begrenzt erfolgreich, da die Taucher nicht lange unter Wasser bleiben und nicht in Tiefen von über 200 m vordringen können, wo einige der Tiefseekorallen wachsen.
Die Schwarmrobotik bietet hier eine innovative Lösung, bei der mehrere kleine autonome Roboter Korallenfragmente aufspüren, wieder in das Riff einbringen und dieses so innerhalb von Tagen bis Wochen wieder aufbauen, statt in Jahren oder Jahrhunderten. Das Forschungsteam hat bereits einige Prototypen von Korallenrobotern gebaut, die mit einer eingebauten Kamera, einem Computer und flexiblen Armen und Greifern ausgestattet werden können. Ob diese ROVs oder AUVs sind, ließ sich bislang aber nicht herausfinden.
Im April 2013 wird eine Crowdfunding-Kampagne auf Kickstarter mit dem Ziel gestartet, 107.000 $ aufzubringen, um das Computer-Vision-System sowie den Manipulatorarm weiterzuentwickeln, die es den Robotern ermöglichen, gesunde Korallenstücke visuell zu identifizieren, aufzunehmen und an der richtigen Stelle zu plazieren. Mit dem Geld sollen zwei Roboter gebaut werden, die die Machbarkeit der Technologie an einem Korallenriff in einem öffentlichen Aquarium öffentlich demonstrieren.
Das Team hofft, daß dies dazu beitragen wird, weitere Gelder einzuwerben, um schließlich acht Korallenroboter zu bauen, die in Korallenriffen auf der ganzen Welt eingesetzt werden könnten. Leider schlägt die Finanzierung jedoch fehl, als sich bis Mai nur 853 Unterstützer finden lassen, die gemeinsam 33.871,88 $ einbringen.
Der Begriff CoralBot findet noch andere Freunde. So wird 2019 am Instituto Hondureño de Ciencia, Tecnología y la Innovación (IHCIETI) der Universidad Tecnológica Centroamericana (UNITEC) in Honduras ein CORALBOT-Projekt gestartet, bei dem ein solar betriebener Roboter zur Untersuchung von Ökosystemen entlang des honduranischen Küstenschelfs eingesetzt wird.

der IHCIETI
Ein weiterer CoralBot wird im Jahr 2020 von der MakerBay Foundation Ltd. entwickelt, einer 2017 durch den japanisch-französischen Pädagogen Cesar Jung-Harada gegründeten Bildungsplattform für Jugendliche. In diesem Fall handelt es sich allerdings um ein autonomes Boot, das mit fünf Kameras ausgestattet ist und 36.000 Fotos pro Stunde aufnehmen kann. Mittels KI werden diese Fotos dann beschriftet und die verschiedenen Korallenarten sowie ihre Standorte erkannt, um dann weitere Analysen und Studien durchzuführen.
In diesem Zusammenhang von Interesse: Im November 2024 folgt ein Bericht der australischen Wissenschaftsbehörde CSIRO, wo Forscher um Stephen Rodan die weltweit erste weiche Roboterhand entwickelt haben, die den heiklen, arbeitsintensiven Prozeß der Aufzucht von Babykorallen in Labors revolutionieren und einen praktikablen Ansatz für die Wiederherstellung der Korallenriffe bieten könnte.
Der aus hartem Polymer und weichem Gummi 3D-gedruckte Greifer ist so konzipiert, daß er an einen Korallenzuchtroboter namens Coral Husbandry Automated Raceway Machine (CHARM) angeschlossen werden kann. Gemeinsam mit der Beyond Coral Foundation soll die Technologie nun in Aquarien und Korallenfarmen auf der ganzen Welt eingesetzt werden, um den zeitaufwendigen Prozeß der Korallenvermehrung teilweise zu automatisieren. Ob sich der Einsatz auch auf Rover-gestützte Unterwasseroperationen erstrecken wird, ist bislang nicht bekannt.
Zurück zur allgemeinen Übersicht:
Das Projekt AquatiCo (Online
Ocean Exploration) der Robotikingenieure Eduardo Labarca, Jose
Manuel Ortiz und ihrem Team in der von Tasha McCauley neu
gegründeten kalifornischen Firma 9th Sense Robotics in
Mountain View, über das im Oktober 2012 in den Blogs
berichtet wird, soll es jedem ermöglichen, ein kleines U-Boot über
das Internet zu steuern und dabei die Echtzeit-Übertragung der an Bord
befindlichen Videokamera zu verfolgen.

von AcquatiCo
Das Team scheint sich schon seit Anfang 2004 mit dem Thema zu beschäftigen und gibt an, daß es einen Auftrag des US-Verteidigungsministeriums erhalten hatte, das 3D- und Computer-Vision-fähige Unterwasserroboter entwickeln wollte. Möglicherweise bildet dies die Grundlage für das nun zivile Projekt AquatiCo.
Bei den hierbei eingesetzten Tauchbooten handelt es sich um kleine, unbemannte ROVs, die auf einem bereits gebauten und regelmäßig eingesetzten Prototypen von 9th Sense basieren. Jedes U-Boot hat eine Länge von 1 m und einen Durchmesser von 12 cm und ist mit einer 1080p-Kamera, einer Beleuchtung, einem GPS- und einem Tiefensensor ausgestattet.
Sie sollen bis zu 122 m tief tauchen und sind über ein 274 m langes Glasfaser-/Stromkabel mit einer an der Oberfläche schwimmenden Boje verbunden. Diese Boje enthält ein Batteriepaket und besitzt Solarzellen, um dieses aufzuladen. Sie soll auch ein Kommunikationssystem beherbergen, das das ROV über einen Relaispunkt an Land mit dem Internet verbindet. Auch ROVs von Drittanbietern könnten in das System integriert werden.
AcquatiCo-Benutzer würden sich anmelden und eine Pilotsitzung für das U-Boot ihrer Wahl planen. Wenn der Zeitpunkt gekommen ist, wird eine Schnittstelle angezeigt, die eine Live-Übertragung vom ROV zeigt. Mit Hilfe von Touchscreen- oder Desktop-Steuerungen übernehmen die Benutzer dann die Kontrolle über das U-Boot und erkunden nach Belieben seine Meeresumgebung. Unterwegs konnten sie Schnappschüsse machen und Freunde einladen, sich ihnen online anzuschließen, an geführten Touren teilzunehmen und ihre Missionen zur späteren Wiedergabe aufzuzeichnen.
Labarca plant, den Dienst mit nur einem ROV zu starten, das vor der Robinson-Crusoe-Insel im Südpazifik, auf Aruba oder in der Monterey Bay stationiert sein könnte. Auf Kickstarter sammelt er nun Geld, um mit dem Projekt zu beginnen. Mit einer Spende von 275 $ kann man einer der ersten AquatiCo-Piloten werden - und für 6.500 $ erhält man ein eigenes ROV.
Doch auch in diesem Fall schlägt die Crowdfunding-Kampagne fehl, da bis Anfang November nur 37.869 $ von 95 Unterstützern zusammenkommen, während das eigentliche Finanzierungsziel 135.000 $ betragen hat. Die Firma ist dann offenbar 2014 oder 2015 gelöscht bzw. aufgelöst worden.
Dive Commander
Im Zuge der Recherche zeigt sich jedoch, daß bereits im Juni 2012 ein webbasiertes Spiel erschien, bei dem ein echtes Mini-U-Boot über den Computer gesteuert werden kann. Der Dive Commander ist eine Kreation des in Idaho ansässigen Technologieunternehmens Reach-In (früher: Apriori LLC bzw. AprioriControl), das schon den iPet Companion auf den Markt gebracht hat, ein System, mit dem Benutzer mit Hunden und Katzen in Tierheimen in Echtzeit spielen können, und zwar über ferngesteuertes Spielzeug und einen Live-Video-Feed. Eine Heimversion des Systems ist ebenfalls erhältlich.
Bei dem neuen Spiel sehen die Spieler Live-Videos von einer Kamera, die in einem angebundenen Mini-U-Boot montiert ist, das sich in einem mit Steinen, Kies, Pflanzentöpfen und anderen Gegenständen dekorierten Wassertank befindet. Darin können die Benutzer das U-Boot herumsteuern und Spielemissionen absolvieren. Die Firma hofft, daß das Spiel in Zukunft von öffentlichen Aquarien genutzt werden kann, um Geldmittel zu beschaffen und das Bewußtsein für die Programme der Einrichtungen zu schärfen und Patenschaften zu fördern - ähnlich wie iPet Companion es bei Tierheimen getan hat.
Später ist die Website divecommander.com aber nicht mehr auffindbar - und auch bei der Firma Reach-In sind nach 2017 keine Aktivitäten mehr festzustellen.
Das ästhetisch beeindruckende Design
eines kleinen ROV, das im November 2013 in den Fachblogs
kursiert, trägt den Namen Espy 360 (o. Espy - 360°
VR ROV) und ist von dem britischen Produktdesigner Dale Wakeham entworfen
worden.

Es basiert auf der Grundlage bewährter ROV-Technologie mit Merkmalen wie Kippstrahlrudern und einem 3-Achsen-Beschleunigungsmesser und -Kreisel, die gemeinsam dafür sorgen, daß das Gerät auch unter rauheren Bedingungen stabil und steuerbar bleibt. Details zu den Antrieben und dem Akku gibt es keine, ebensowenig zu Ausdauer und Tauchtiefe.
Der Unterwasser-Spion soll die Beobachtung des Meereslebens revolutionieren, da er mit sechs GoPro-Kameras ausgestattet ist, die sich innerhalb einer transparenten Sphäre befinden und eine 360°-Videoaufnahme im Stil von Google Street View ermöglichen - im Gegensatz zu vielen anderen ROVs, die nur eine einzige nach vorne gerichtete Kamera haben. Das robuste Design ist mit einem Schutzkäfig, Edelstahlrahmen, Stoßfängern und einem leicht zu packenden Griff ausgestattet, was es zu einem einfachen und zuverlässigen ROV während des Einsatzes und der Bergung macht.
Man findet zwar eine sehr umfangreiche Design- und Machbarkeitsstudie des Espy 360 nebst Fotos eines Prototypen, der an der University of New South Wales (UNSW) in Chowder Bay, Australien, getestet wurde, doch in Produktion gegangen ist das ROV, dessen angedachter Verkaufspreis bei 24.000 $ liegt, bislang nicht.
Ein Team der japanischen Okayama University um Prof. Mamoru Minami präsentiert im Dezember 2014 ein MOS/AUV (Move on Sensing/Autonomous Underwater Vehicle) genanntes Fahrzeug, das so konzipiert ist, daß es sich selbständig auf dem Meeres- oder Seegrund fortbewegt und dabei verschiedene Aufgaben ausführt.

Das Move-on-Sensing-System kombiniert stereoskopische 3D-Computersicht mit herkömmlicher Sonartechnik und ermöglicht die Suche, Verfolgung und Lokalisierung von Unterwasserobjekten mit einer Genauigkeit von 5 mm - was in Zukunft auf 0,5 mm reduziert werden soll. Das MOS/UAV kann sogar Objekte verfolgen, die sich mit bis zu 1 cm/s bewegen, wie es der Fall sein könnte, wenn sie von Strömungen getragen werden.
Die Wissenschaftler hoffen, daß das in Zusammenarbeit mit der in Osaka beheimateten Firma für Unterwasserausrüstung Kowa Corp. entwickelte Gerät letztendlich für Anwendungen wie die Beseitigung von radioaktivem Material unter Wasser, die Erkundung von Mineralien, die Wartung von Telekommunikationskabeln und die Umweltüberwachung eingesetzt wird.
In Pooltests ortet das MOS/AUV erfolgreich ein Ziel, das aus einem 7 cm breiten Ring besteht, der eine Unterwasser-Ladestation für das Fahrzeug simulieren sollte. Dazu verfolgt es ,optische Induktionsmarker’ auf dem Ziel und verwendet Algorithmen, um diese Marker mit Punkten auf 3D-Computermodellen des Ziels abzugleichen und dieses dann anzufahren.
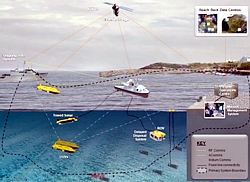
Roboter einzusetzen, um Unterwasser-Minen zu bekämpfen, ist auch das Ziel eines anglo-französischen Projekts, über das im März 2015 berichtet wird. Den Auftrag für die maritime Minenabwehrmaßnahme (MMCM) hatte die Organisation für Rüstungszusammenarbeit (OCCAR), die gemeinsame Programme zwischen Belgien, Frankreich, Deutschland, Italien, Spanien und dem Vereinigten Königreich fördert und verwaltet, im Namen der französischen Beschaffungsbehörde für Verteidigungsgüter (DGA) und der britischen Organisation für Verteidigungsausrüstung und -unterstützung an den Elektronikkonzern Thales vergeben.
(Grafik)
Der Start dieses Programms baut auf den im November 2010 unterzeichneten Lancaster-House-Verträgen über Verteidigungs- und Sicherheitskooperation auf und folgt auf den französisch-britischen Gipfel vom Januar 2014. Die Wichtigkeit einer solchen Maßnahme erklärt sich leicht.
Es kostet zehnmal so viel und es ist zehnmal langsamer, eine Mine zu entfernen, als sie zu legen. Um die Minenjagd schneller, billiger und sicherer zu machen, soll daher ein autonomes System zur Aufspürung und Neutralisierung von Seeminen und improvisierten Unterwassersprengkörpern (UWIED) zum Einsatz kommen. Der MMCM-Vertrag umfaßt die Entwicklung, Herstellung und zweijährige Erprobung künftiger autonomer, ferngesteuerter Minenabwehrsysteme für das künftige französische Minenabwehrsystem (SLAM-F) und das britische Minenabwehrsystem MHC (Mine Countermeasures and Hydrography Capability).
Thales sieht die Minenjäger von morgen als eine Flotte von Unterwasserrobotern, unbemannten Überwasserschiffen, geschleppten Sonaren und ferngesteuerten Fahrzeugen, die über Iridium-Satellitenverbindungen sowie Funk-, Akustik- und direkte Kabelverbindungen miteinander verbunden sind, so daß das Kommandoschiff, die Roboter, die lokalen Einsatzzentralen und die Reach-Back-Rechenzentren in enger Verbindung bleiben.
Das System soll hochauflösende Sonarsysteme zur Gefahrenvermeidung verwenden, während unbemannte, autonome Überwasserfahrzeuge mit ROVs und AUVs zusammenarbeiten, die in der Lage sind, Minen mit Hilfe spezieller Analysetools zu identifizieren und zu neutralisieren. Die weiteren Partner des Projekts sind BAE Systems, ASV Ltd., ECA, Wood & Douglas und SAAB.
Letzteres Unternehmen ist übrigens der Entwickler eines ROV namens Sea Wasp, das auf der Sea-Air-Space Exposition der US Navy League im Mai 2016 in National Harbor, Maryland, vorgestellt wird. Das Gerät soll unkonventionelle Sprengkörper (Improvised Explosive Devices, IEDs) aufspüren und neutralisieren, die nicht nur an Land eine Bedrohung sind, sondern auch unter Wasser. Minenjäger und Minenräumer machen schon lange einen großen Teil moderner Marinen aus, doch in den letzten Jahrzehnten sind immer mehr kleine ,terroristische Sprengkörper’ aufgetaucht, die schwieriger zu entdecken und zu beseitigen sind.
Die 1986 gegründete Saab Seaeye Ltd., eine hundertprozentige Tochtergesellschaft der Saab Underwater Systems AB, bietet ein breites Sortiment von ROVs an, die sich vom portablen und vielseitigen Modell Seaeye Falcon bis zum hochprofessionellen Arbeitsgerät Seaeye Jaguar und den militärischen Reihen Double Eagle und Sea Owl erstreckt. Der Firma zufolge ist das Standardverfahren bei IEDs die manuelle Handhabung durch Kampfmittelbeseitigungstaucher, eine sehr langsame und sehr gefährliche Arbeit.
Als Lösung zur Ortung, Identifizierung und Beseitigung von IEDs auf engem Raum, z.B. in Docks, Häfen und Hafenanlagen, konzipiert Saab eine auf der Seaeye-Reihe basierende Sea Waterborne Anti-IED Security Platform (WASP), die durch die Kombination von Robotik und spezialisierten militärischen Systemen von einem Zweierteam gesteuert werden kann, das außerhalb des Wassers und in sicherer Entfernung vom Geschehen bleiben kann.
Mit einer Länge von 1,3 m und einem Gewicht von 75 kg kann das hydrodynamisch stabile ROV für individuelle Missionen konfiguriert und von einer Hafenmauer, einem Strand oder einem Überwasserschiff aus gestartet werden. Es bewegt sich mit mehr als 2,5 Knoten in einer Tiefe bis 150 m und kann autonom die Position halten, Hindernissen ausweichen und mit dem intelligenten Steuerungssystem iCON von Seaeye sowie Positionierungssystemen und einem Kompaß eine Wegpunktnavigation durchführen.
Außerdem gibt es ein Fächerecholot, eine schwenk- und neigbare Farbvideokamera und eine zweite Kamera für den Manipulatorarm. Mit Strom versorgt wird das System über ein 160 m langes Strom- und Glasfaserkabel. Um in den nächsten 10 - 12 Monaten Prototypen von Sea Wasp zu testen, arbeitet Saab mit dem US Combating Terrorism Technical Support Office (CTTSO), der US Navy EOD Group 2, der FBI Counter-IED Unit und der South Carolina Law Enforcement Division’s Counter-Terrorist Operations Maritime Response Unit zusammen.
In den Folgejahren nehmen die Meldungen über neue ROVs aller Arten
stark zu.
Im April 2016 wird ein ROV-Modell vorgestellt, das eine ganz spezielle Funktion hat: Ähnlich wie Flugdrohnen, die über einen Follow-me-Modus verfügen - das heißt, sie können angewiesen werden, autonom über ihrem Nutzer zu fliegen und Videos aufzunehmen -, verfolgt die Unterwasserdrohne iBubble ihren Benutzer beim Schwimmen unter Wasser mit Hilfe einer patentierten Technik, die Echolot und Objekterkennung kombiniert.

Die fertige Version der iBubble, die sich derzeit noch im Prototypstadium befindet, wird eine verzerrungsfreie optische Kuppel enthalten, in der die GoPro Hero 3 oder 4 des Benutzers befestigt wird. Die Kamera wird von einem Bildstabilisierungssystem unterstützt, und zwei LED-Strahler sorgen für die Beleuchtung.
Wie bei Flugdrohnen können die Nutzer die schwimmende Kamera anweisen, sich einfach mit ihnen zu bewegen. Mit einer am Handgelenk befestigten Fernbedienung können sie sie jedoch auch dazu bringen, sich in einer horizontalen oder vertikalen Schleife um sie herum zu bewegen. Der iBubble hat eine maximale Reichweite von 25 m von der Fernbedienung aus und kann bis zu 60 m tief abtauchen. Zudem lassen sich auch im manuellen Modus Fotos oder ein Video aufnehmen - und mit Hilfe des Objekterkennungssystems ist es möglich, ein sich bewegendes Ziel wie einen Fisch oder eine Meeresschildkröte visuell zu erfassen und ihm dann zu folgen, wobei es im Bild zentriert bleibt.
Und: Der iBubble kann als ferngesteuertes Fahrzeug (ROV) verwendet werden, indem die Drohne an ein optionales 100 m langes Kabel angeschlossen und von der Oberfläche aus mit Joysticks gesteuert wird. Ein sonargestütztes Hindernisvermeidungssystem verhindert dabei, daß sie während der Fahrt auf Dinge wie Korallenköpfe trifft. Details über Motor und Akku gibt es keine, aber eine Ladung des Lithium-Polymer-Akkus soll für etwa eine Stunde Nutzung ausreichen.
Die Entwickler des iBubble um Nicolas Gambini sammeln nun auf Indiegogo Produktionsmittel für das Gerät, das hierbei für 1.299 $ angeboten wird, während der geplante Verkaufspreis bei 2.200 $ liegt (später: 1.999 $). Die Crowdfunding-Kampagne ist sehr erfolgreich, da 219 Unterstützer insgesamt 220.992 $ zusammenbringen - was 266 % des Ziels von 75.000 $ darstellt.
Im gleichen Monat berichten die Blogs über eine ganz besondere Art von ROV: Der von dem britischen Unternehmen BAE Systems entwickelte Archerfish kann nämlich nicht nur von Überwasserschiffen eingesetzt, sondern auch von Hubschraubern abgeworfen werden, um dann abzutauchen. Seine Funktion ist es, sowohl treibende als auch am Grund liegende Seeminen zu orten und zu sprengen, indem er sie mit einer gerichteten Sprengladung beschießt. Auf Fotos ist zu sehen, daß er vier davon mit sich trägt.

Sobald das ROV von seiner Startrampe ins Wasser abgeworfen wurde, kann es über ein Glasfaserkommunikationskabel, das zum Hubschrauber zurückführt, von seinem menschlichen Operator ferngesteuert zur Mine hinuntergeführt werden. Die maximale Einsatztiefe beträgt 300 m. Mithilfe des Sonars und des Schwachlicht-Videos sieht der Operator, wann das ROV die Mine gefunden hat, und kann es dann anweisen, eine Sprengladung auf das Ziel zu schießen, um es zur Explosion zu bringen. Über die Rückholung des Geräts wird nichts gesagt.
Das ca. 1,6 m lange und etwa 16 kg schwere ROV, das mehr wie ein Glider aussieht, ist bereits seit einigen Jahren in Arbeit. Nachdem die US Navy das Konzept 2003 als Teil ihres Programms Airborne Mine Neutralization System (AMNS) ausgewählt hatte, wurde 2007 mit der Entwicklung begonnen. Jetzt hat das US-Verteidigungsministerium der BAE einen Auftrag im Wert von über 22 Mio. $ für die Herstellung und Lieferung der ROVs für den Einsatz bei der Marine erteilt, die Auslieferung soll im September 2017 beginnen.
Ein drittes ROV, das im April 2016 vorgestellt wird, ist ebenfalls etwas Besonderes - denn der Ocean One der Stanford University ist ein humanoider Tauchroboter. Das Konzept entsteht aus der Notwendigkeit, Korallenriffe tief im Roten Meer zu erforschen, weit unterhalb der Reichweite von menschlichen Tauchern.
Das Team um Prof. Oussama Khatib (o. Al-Khatib) entwickelt den Ocean One für Tauchtiefen bis zu 1.000 m, die für Taucher nicht erreichbar sind. Um dort die Sorgfalt und Geschicklichkeit eines menschlichen Tauchers zu erreichen, was derzeit kein existierendes Roboter-U-Boot kann, wird das 1,50 m große Gerät in humanoider Form mit stereoskopischen Kameras im Kopf und mit zwei Armen konstruiert.

Die Arme enden in voll beweglichen Handgelenken, die dem Piloten haptisches Feedback geben. So soll er gefühlvoll zugreifen können, auch wenn die zehn Finger des Roboters zurzeit noch nicht mit Sensoren ausgestattet sind. Die Steuereinheit des Tauchroboters verfolgt alle Sensordaten lokal und soll autonom dafür sorgen, daß die einmal eingestellte Griffhaltung auch ohne fortgesetzte Aufmerksamkeit des Piloten bestehen bleibt. Acht schwenkbare Antriebs-Propeller ermöglichen ein vorsichtiges Manövrieren unter Wasser, und beim Schwimmen soll der Roboter Kollisionen automatisch vermeiden.
Auf seiner ersten Tauchfahrt in Zusammenarbeit mit der Direction des recherches archéologiques subaquatiques et sous-marines (DRASSM) rund 30 km vor der französischen Mittelmeerküste und in 100 m Tiefe durchstöbert der Ocean One das Wrack des 1664 gesunkenen Schiffs La Lune, damals das Flaggschiff des Sonnenkönigs Louis XIV. Gesteuert von Khatib an Bord der André Malraux entdeckt der Roboter eine Vase von der Größe einer Grapefruit, kann diese mit zwei Roboterfingern greifen und erfolgreich an die Oberfläche bringen.
Längerfristig sollen Tauchroboter nach dem Muster von Ocean One dazu dienen, Korallenriffe zu erkunden und ansonsten Montagearbeiten ausführen, wo es für Menschen zu gefährlich wäre. Dann sollen mehrere Roboter auch im Team arbeiten können.
Im August 2022 folgt die Meldung, daß ein Modell der nächsten Generation, der OceanOneK (o. O2K), inzwischen über haptisches Feedback verfügt. Im Laufe des Jahres wird der O2K in La Ciotat vor der Côte d’Azur, in Bastia vor Korsika und in Cannes eingesetzt, wo er 852 m tief taucht. Nun bekundet die Europäische Weltraumorganisation ihr Interesse, den menschlichen Tastsinn auch auf den Mond oder andere Planeten zu bringen.
Im Juni 2016 folgt ein weiteres ROV für den Endverbraucher, das im bezahlbaren Segment liegt. Das BlueROV2 der Firma Blue Robotics Inc. aus St. Torrance in Kalifornien nutzt einige der Technologien, die es möglich gemacht haben, daß Flugdrohnen erschwinglich geworden sind, und soll schon bald für rund 3.000 $ zu haben sein.

Dem Unternehmensgründer Rustom Jehangir zufolge kann das ROV bis zu einer maximalen Tiefe von 100 m abtauchen und mit sechs Triebwerken manövrieren. Es ist über eine Nabelschnur mit einem Laptop oder Tablet verbunden, so daß der Benutzer es mit ein er App in Echtzeit steuern kann. Außerdem ist das Tauchboot mit einem Open-Source-Autopiloten und einem Raspberry Pi-Mikrocomputer ausgestattet. Die gesamte Anlage wiegt etwa 10 kg, das 100 m lange Seil ca. 4,5 kg zusätzlich.
Je nach gewähltem Paket werden Videos entweder von einer SD- oder HD-Kamera an Bord aufgenommen und auf den Bildschirm des Benutzers übertragen. Eingebaute LED-Scheinwerfer helfen bei der Ausleuchtung der dunklen Tiefen und die Laufzeit des Akkus reicht derzeit für etwa eine Stunde bei starker Beanspruchung oder bis zu vier Stunden bei leichteren Aufgaben aus. In Zukunft soll die Kapazität des Akkus verdoppelt werden, außerdem wird die Möglichkeit einer Stromversorgung von der Oberfläche über das Seil geprüft.
Interessierte können das BlueROV2 zu Preisen ab 3.000 $ für das Basismodell, das etwas Montage erfordert, vorbestellen, die Auslieferung soll in zwei Monaten beginnen.
Ein Rover mit ,tödlichem Auftrag’ erscheint im August 2016 in den Fachblogs. Demnach hat sich Robots in the Service of the Environment (RISE), eine im Vorjahr gegründete unabhängige Non-Profit-Organisation mit Sitz in den USA, die sich auf die Entwicklung und den Einsatz von Robotertechnologie für großflächige Umweltprobleme spezialisiert hat, mit der in Oxford beheimateten gemeinnützigen Tiefseeforschungsorganisation Nekton zusammengetan, um einen Unterwasserroboter zu testen, der Rotfeuerfische (Lionfish, Pteroinae) aufspürt und tötet.

Prototyp
Mit weit über einer Million Exemplaren, die die Gewässer an der Ost- und Südküste Nordamerikas befallen haben, bilden diese nicht sehr großen, schönen, giftige Stacheln besitzenden und gefräßigen Fische eine Umweltkatastrophe, die sich bis nach Neuengland im Norden und Venezuela im Süden ausgebreitet hat und Ökosysteme von Massachusetts bis Mexiko beeinträchtigt. Die aus dem indopazifischen Raum stammende invasive Art war bis vor etwa 25 Jahren in amerikanischen Gewässern unbekannt.
Niemand weiß genau, wie sie eingeschleppt wurden, aber DNA-Analysen von Rotfeuerfischen, die in der Karibik, auf den Bahamas und an anderen Orten gefangen wurden, deuten darauf hin, daß alle Rotfeuerfische auf dem amerikanischen Kontinent von nur wenigen Individuen abstammen. Dies deutet darauf hin, daß sie wahrscheinlich das Ergebnis privater Sammler sind, die ihre Aquarien im Meer versenkten.
Die Fische sind Raubtiere ohne natürliche Feinde, haben einen unersättlichen Appetit, der sie täglich fast die Hälfte ihres eigenen Körpergewichts verzehren läßt, und einen rasanten Fortpflanzungszyklus, der sie innerhalb eines Jahres geschlechtsreif werden läßt, wobei die Weibchen alle vier bis fünf Tage 30.000 Eier ablegen. Schlimmer noch: Die einheimischen Fische sind nicht an sie angepaßt, so daß der Rotfeuerfisch einfach heranschwimmen und so ziemlich alles fressen kann, was er will, ohne Alarm zu schlagen.
Das Ergebnis ist die besorgniserregende Ausbreitung eines Fisches, der, sobald er sich etabliert hat, die Population eines Riffs innerhalb nur eines Jahres um 64 % reduzieren kann. Andere Quellen zufolge kann ein einziger Rotfeuerfisch die Fischbiomasse eines Riffs in nur einem Monat um 80 % verringern.

Um das Problem einzudämmen oder sogar rückgängig zu machen, haben die Behörden in den USA und anderswo in den letzten Jahren aktive Maßnahmen gegen den Rotfeuerfisch ergriffen, wie z.B. Sporttaucher zur Jagd auf die Fische zu ermuntern, was aber nur bis zu einer Tiefe von 15 - 25 m funktioniert. Die Tatsache, daß Rotfeuerfische köstlich schmecken, ist ein weiterer Anreiz, und Restaurants haben sich dem Kampf angeschlossen, indem sie Rotfeuerfische auf ihre Speisekarten gesetzt haben. Leider haben solche Aktionen aber nicht ausgereicht.
Um die Jagd zu unterstützen, wird nun auf den Bermudas ein Unterwasserroboter getestet, der an einem Kabel befestigt und von oben ferngesteuert wird, um Rotfeuerfische zu jagen und mit einer Roboterklaue, die einen Stromschlag abgibt, zu töten. Der Roboter besteht aus drei Komponenten: dem ROV, dem Steuersystem und dem Tötungsmechanismus, bei dem verschiedene Arten von Schockmechanismen untersucht werden, z.B. Gleichstrom, Impuls, Wechselstrom oder etwas, das einem Taser ähnelt.
Gegenwärtig werden das ROV an der US-Westküste, und der Tötungsmechanismus an der Ostküste getestet, um in ein paar Monaten zusammengeführt zu werden. Der Prototyp besitzt ein Sichtsystem, mit dem man auf den Fisch zusteuern kann, um ihm dann einen Schlag zu versetzen. Anschließend wird der Kadaver durch eine Pumpe, die einen Wasserstrom erzeugt, langsam in einen Käfig gesaugt, der den Fisch an die Oberfläche bringt. Wie die später Guardian LF1 genannte Maschine funktioniert, ist in einem YouTube-Video mit dem Titel ,Lionfish robot zapper hits the open water’ zu sehen, das im Juni 2017 veröffentlicht wird.
Im gleichen Kontext präsentieren Studenten des Worcester Polytechnic Institute (WPI) im April 2018 ein autonomes Robotersystem, das für die Jagd und Tötung von Rotfeuerfischen keinen menschlichen Bediener mehr benötigt.
des WPI
Der WPI-Roboter besteht aus zwei Systemen. Das eine ist eine KI-Plattform, die maschinelles Lernen, neuronale Netzwerksoftware, Computer-Vision-Bibliotheken und -Modelle einsetzt, um Rotfeuerfische zu identifizieren. Dieses System nutzt eine Datenbank, die aus Tausenden von Bildern von Rotfeuerfischen sowie aus Bildern von Lebewesen erstellt wurde, die keine Rotfeuerfische sind und nicht gejagt werden sollen, wie z.B. Taucher.
Der zweite Teil ist eine Art Speerhalter aus einem rotierenden Zylinder und acht schwimmfähigen Speeren. Wenn sich der Roboter einem Rotfeuerfisch nähert, stößt ein Metallschaft den Speer in den Fisch. Sobald sich der Schaft dann zurückzieht, löst sich die Speerspitze, und ihr Auftrieb zieht den Rotfeuerfisch zum Einsammeln an die Oberfläche. In der Zwischenzeit verdrängt eine wasserdichte, luftgefüllte Kammer das Wasser, das dem Speer entspricht, um die Trimmung des Roboters beizubehalten.
Laut WPI ist der neue Roboter so konzipiert, daß er mit kommerziellen autonomen Robotern kompatibel ist. Ein zweites WPI-Team wird im akademischen Jahr 2018/2019 an einem Navigationssystem arbeiten, das es dem Roboter ermöglichen wird, autonom ein 3D-Suchraster zu erstellen und auszuführen.
Ebenfalls in diesem Kontext ist eine Meldung vom August 2018 einzuordnen, der zufolge Forscher der Queensland University of Technology (QUT) unter der Leitung von Prof. Matthew Dunbabin in Zusammenarbeit mit der Wohltätigkeitsorganisation Great Barrier Reef Foundation und Google sogenannte RangerBots entwickelt haben, die auf einem AUV der o.e. Firma Blue Robotics basieren und weiteren stacheligen Schädlingen den Garaus machen sollen, nämlich den Dornenkronen-Seesternen (Acanthaster planci).

Diese bis zu 1 m großen, giftigen und korallenfressenden Stachelhäuter machen in Massen einem der artenreichsten Ökosysteme der Erde zu schaffen, dem Great Barrier Reef. Laut einer Studie des australischen Institute of Marine Science hat die Region zwischen 1985 und 2012 die Hälfte ihrer Korallen eingebüßt, wobei 40 % davon den gefräßigen Dornenkronen zum Opfer fielen.
Dabei sind die Stachelhäuter, die zu den größten Seesternen der Welt gehören, eigentlich keine Schädlinge: In geringerer Zahl helfen sie sogar, die Korallenvielfalt zu bewahren, denn sie fressen die am schnellsten wachsenden Arten. Doch sobald sich pro Hektar mehr als etwa 15 Dornenkronen tummeln, wird schneller gefressen, als nachwachsen kann. Tatsächlich gibt es in der Region derzeit mehrere Millionen von ihnen, und nur der Klimawandel setzt den Korallen noch schlimmer zu.
Die Wissenschaftler sehen zwei Hauptgründe für die derzeitige Dornenkronen-Plage: zum einen den Rückgang ihrer natürlichen Feinde wie Stern-Kugelfische oder Tritonshörner, einer Schneckengattung. Zum anderen läßt der zunehmende Eintrag von Nährstoffen aus der Landwirtschaft ins Meer die Algen wuchern - die Hauptnahrung der Dornenkronen-Larven. Um die Ausbreitung aufzuhalten, töten Taucher die Tiere bisher einzeln mit Giftspritzen, ein umständliches Verfahren und ohne durchschlagenden Erfolg.

Ein RangerBot kann hingegen per Tablet durch komplexe Korallenriffe navigiert werden, um dort Dornenkronen-Seesterne aufzuspüren. Die kleinen Killer-Roboter sind darauf trainiert, die Seesterne mit einer Zuverlässigkeit von 99,4 % zu identifizieren, und zwar nur diese korallenzerstörende Art. Das 15 kg schwere und 75 cm lange Gerät schießt dann eine tödliche Injektion aus Essig oder Gallensalz in den Seestern.
Der Roboter kann pro Batterieladung bis zu acht Stunden tauchen und auch nachts im Einsatz sein, selbst in Gewässern mit Haien und Krokodilen. Zudem kann er die Korallenriffe auch auf andere Gefahren hin inspizieren, etwa sonstige Schädlinge, Korallenbleiche oder Versandung.
Im Zuge der Recherche zeigte sich, daß die QUT die erste Version des RangerBots schon Anfang der 2000er Jahre entwickelt hat, die damals COTSBot genannt wurde und eine Genauigkeit von etwa 65 % erreichte. Der Roboter soll in der Lage gewesen sein, etwa 20 Einsätze pro Tag durchzuführen und mit Hilfe einer Nadel am Ende eines langen, umhängenden und ausklappbaren Arms und zwei Litern eines speziell entwickelten Gifts etwa 200 Dornenkronen-Seesterne zu töten.
Darüber hinaus wird im Oktober 2018 berichtet, daß
ein weiteres QUT-Team unter der Leitung von Prof. Peter Harrison von
der Southern Cross University einen Unterwasserroboter
namens LarvalBot entwickelt hat, als eine neue Generation
des RangerBot, mit dem es erstmals gelungen ist, geschädigte Bereiche
des Great Barrier Reef mit hitzetoleranten Baby-Korallenpolypen zu
besiedeln, um die Auswirkungen von Raubtieren und Klimawandel konstruktiv
zu bekämpfen.

Das Riff wurde durch eine Reihe größerer Bleichereignisse verwüstet, zuletzt 2016 und 2017, bei denen der mittlere und nördliche Teil schwer geschädigt wurde. Diese Bleichereignisse treten auf, wenn anormale Meeresbedingungen, wie z.B. wärmeres Wasser, Streß für die in den Korallen lebenden Algen verursachen und diese verdorren, ausbleichen und abzusterben drohen. Die Korallen können sich von solchen Ereignissen selbst erholen, aber da die Temperaturen des Meeres voraussichtlich weiter steigen werden, suchen Naturschützer nach Wegen, um den Korallen eine bessere Chance zu geben.
Die Great Barrier Reef Foundation hatte daraufhin im Rahmen des Out of the Blue Box Reef Innovation Challenge 300.000 AU$ für das beste Konzept bereitgestellt, das die Erhaltung unterstützt. Das aus fünf Finalisten ausgewählte Siegerprojekt stammte von den Professoren Harrison und Dunbabin: eine Idee, die dem Massenlaichen von Korallen einen enormen Auftrieb geben soll. Die Innovatoren verwenden das Preisgeld, um diese Idee in die Tat umzusetzen.
Das Konzept beginnt mit der Sammlung von Millionen von Korallenlaich und der Aufzucht dieser Korallenbabys in großen Becken mit einem Durchmesser von 30 m, wobei in Zukunft noch größere Tanks gebaut werden sollen. Wenn die Zeit reif ist, verteilen die LarvalBots die Korallenlarven während der jährlichen Laichzeit im Riff. Es wird erwartet, daß dies nicht nur die Anzahl der Babykorallen um das Hundertfache erhöhen wird, sondern daß sie auch dort plaziert werden können, wo das Riff sie am meisten braucht.
Bei Tests, über die im Januar 2020 berichtet wird, hat der LarvalBot in sechs Stunden über 30.000 m2 abgedeckt. Nun will die QUT in den Folgemonaten versuchen, eine Fläche von 1.000.000 m2 mit dem besonderen ROV wiederherzustellen.
Eine weitere Consumer-Unterwasserdrohne wird im
September 2016 bekannt,
als ihre Entwickler um Henry He zur Finanzierung eine
Crowdfunding-Kampagne auf indiegogo starten. Das CCROV genannte,
kastenförmige Gerät bietet die gleichen grundlegenden Funktionen wie
andere Modelle, hat aber eine integrierte 4K-Kamera, die Echtzeit-Videos
an den Betreiber sendet.

mit Spule
Das CCROV ist über ein Steuerkabel mit seinem Bediener an Land verbunden, wobei zwischen Kabellängen von 20 - 100 m gewählt werden kann, die auf ein landgestütztes ,Tether Deployment System’ (TDS) aufgespult werden. Dieses System kommuniziert über Wi-Fi mit dem Mobilgerät des Benutzers oder einer optionalen Joystick-Steuerungseinheit, um die Drohne bis zu ihrer maximalen Tauchtiefe von 100 m zu steuern und dabei das Bild der Bordkamera zu betrachten.
Neben der Kamera verfügt das CCROV über vier LED-Scheinwerfer und sechs Schubdüsen - vier für die horizontale und zwei für die vertikale Bewegung. Eine 90-minütige Ladung des Akkus, der sich nicht in der Drohne, sondern im Seilauslösesystem befindet, reicht für etwa eine Stunde Nutzung aus.
Die Indiegogo-Kampagne mit einem Zielbetrag von 20.000 $, bei der ein CCROV mit einem 25 m langen Kabel für 1.599 $ angeboten wird (der später geplante Verkaufspreis liegt bei 2.699 $), ist erfolgreich, wobei sue von nur 18 Unterstützern mit insgesamt 31.837 $ finanziert wird. Im März 2018 wird gemeldet, daß nun alle CCROVs ausgeliefert worden sind. Dem Stand von 2025 zufolge ist das Gerät noch erhältlich, kostet inzwischen aber rund 4.000 €.
Wie im Oktober 2016 berichtet wird, nutzt auch das Alfred-Wegener-Institut (AWI)
ROVs, insbesondere für die Erforschung der Unterseite von Meereis und
in der Tiefsee. Das Infrastrukturprogramm Frontiers in Arctic Marine
Monitoring (FRAM), das seit zwei Jahren von der Helmholtz-Gemeinschaft
unterstützt wird, ermöglichte die Entwicklung verschiedener neuer Geräte
für biologische und ozeanographische Messungen, darunter auch für ein
ROV.

Der Beast genannte Tauchroboter ermöglicht es, die Eigenschaften des Meereseises und vor allem dessen räumliche Variabilität direkt an der Unterseite des Eises zu untersuchen. Es kann physikalische, biologische und geochemische Eigenschaften gleichzeitig messen und die Tauchgänge durch mehrere Kameras dokumentieren. Das Fahrzeug mit drei Freiheitsgraden kann in Strömungen von bis zu zwei Knoten arbeiten.
Bei der Recherche stellt sich heraus, daß es sich bei den ROV um ein Produkt der Firma Ocean Modules Sweden AB handelt, Mitglied der Holdinggesellschaft ACC-Group AB, welche seit 2002 als Branchenpionier ROV-Systeme entwickelt, die zu den vielseitigsten und agilsten der Welt zählen. 2006 wurden der V8 Sii und der V8 Offshore auf den Markt gebracht, gefolgt von den Modellen V8 M500 und V8 L3000 im Jahr 2014. Letzterer ist vermutlich die 270 kg schwere Plattform des AWI-ROVs, das von acht 1,5 kW Strahlrudern bewegt wird.
Ab Juni 2017 kommt der zwischenzeitlich optimierte und erweiterte Tauchroboter auf der Polarstern-Expedition PS106 unter arktischem Meereis zum Einsatz. Um das Zooplankton und die Tiere direkt unter dem Meereis bestmöglich zu beproben, war ein 5 m langes Schleppnetz für das ROV entwickelt worden, das an der Oberseite einen Besen hat. Indem mit diesem Besen die Unterseite des Eises abgefegt wird, werden Tiere, die direkt unter dem Meereis sitzen, gesammelt und in das Netz gespült.
Um kleinskalige physikalische Prozesse wie zum Beispiel Verwirbelungen im Wasser zu messen und ihren Einfluß auf biologische Prozesse wie das Algenwachstum zu untersuchen, wird am AWI zudem ein PAUL genanntes AUV in Form eines Gliders weiterentwickelt.
Ähnlich geht es auch 2017 weiter: Im Januar stellt der in Peking ansässige Drohnenhersteller PowerVision Robot auf der CES eine Unterwasserdrohne in der Form eines Rochens vor, die mit Sonar Fische aufspürt, mit blauem Licht anlockt und mit einer 4K-Kamera das ganze Geschehen auf das Smartphone überträgt. Für das neue ROV wird PowerVision mit dem Best of CES 2017 Award ausgezeichnet - dem später noch weitere Designpreise folgen.

Die 2009 gegründete Firma war im Vorjahr mit der Flugdrohne Power Egg international bekannt geworden, die unter Neue Designs in der Jahresübersicht der Elektro- und Solarfluggeräte aufgeführt ist (s.d.).
Das 3,8 kg schwere Profigerät namens PowerRay kann 30 m weit unter die Wasseroberfläche tauchen und mit einem optionalen Sonaraufsatz Fische in bis zu 40 m Entfernung aufspüren. Angler können es auch mit Ködern bestücken und losschicken, um mit dem blauen Licht Fische anzulocken. Die Drohne verfügt über einen Videostabilisierungsmodus sowie eingebaute LED-Frontlichter. Für die Steuerung und die Übertragung von Live-Fotos und -Videos an den Benutzer sorgt ein 70 m langes Kabel, die Batterielaufzeit wird mit vier Stunden angegeben.

Als weiteres optionales Extra gibt es eine PowerVision VR-Brille, die eine Ego-Perspektive bietet und es dem Benutzer ermöglicht, die Drohne durch Neigen des Kopfes zu steuern. Preise sind noch bekannt gegeben worden, das PowerRay soll ab Februar für Vorbestellungen verfügbar sein, der Preis beträgt 1.600 €, geht später aber bis auf 449 $ herunter.
Im Jahr 2020 kommt die Überwasser-Schwimmdrohne PowerDolphin hinzu, die mit einer drehbaren Doppelgelenkkamera mit einem Aufnahmewinkel von 132° ausgestattet ist und von einem 5,8 Ah Akku angetrieben wird, der eine Betriebszeit von zwei Stunden ermöglicht.
Zusätzlich zu den Bildgebungsfunktionen nutzt das Gerät Sonartechnologie für die Unterwasserkartierung und integriertes GPS für die Wegpunktnavigation. Es soll eine Höchstgeschwindigkeit von 4,5 m/s erreichen. Die PowerDolphin wird für 799 $ für das Standard-Paket, 799 $ für das Explorer-Paket und 899 $ für das Wizard-Paket angeboten. Gebraucht läßt sie sich später aber ab 400 € finden.
Im März 2017 folgt eine Crowdfunding-Kampagne auf indiegogo für die Unterwasserdrohne Gladius des chinesischen Unternehmens CHASING-Innovation Co. Ltd., die in den Modellen Standard und Advanced hergestellt wird, komplett mit einem eigenen Hartschalen-Reisekoffer. Die ROVs mit den Maßen 432 x 269 x 112 mm haben ein schwimmfähiges Gehäuse aus Aluminiumlegierung, vier Schubdüsen, eine Laufzeit von drei Stunden pro 1,5-stündiger Ladung der beiden Lithium-Polymer-Akkus und eine maximale Vorwärtsgeschwindigkeit von 2 m/s.

Beide Versionen der 3,2 kg schweren Drohne sind mit einer 30 m langen Leine ausgestattet, die an einer mit Wi-Fi ausgestatteten Boje befestigt ist, welche an der Oberfläche mitgeschleppt wird. Ein längeres 100 m Kabel ist als Upgrade erhältlich, mit dem sich die Drohne weiter von der Boje entfernen und/oder tiefer tauchen kann. Die maximale Tauchtiefe beträgt 100 m. Die beiden Modelle haben unterschiedliche Wi-Fi-Reichweiten, wobei die Standard-Drohne eine Reichweite von 30 m und die Advanced-Drohne eine Reichweite von 500 m hat.
Mit Hilfe eingebauter LED-Scheinwerfer werden Fische, versunkene Schiffe u.ä. ausgeleuchtet und von der Kamera mit einer maximalen Auflösung von 1080p/60fps bei der Standard-Drohne bzw. 4K/30fps bei der Advanced-Drohne aufgezeichnet, wobei das Filmmaterial und die Fotos auf einer integrierten SD-Karte gespeichert werden. Über einen 720p-Video-Feed kann man aber auch in Echtzeit sehen, was die Kamera der Drohne sieht. Das System verfügt über eine videospielähnliche Steuerung und integriert das iOS- oder Android-Smartphone des Benutzers.
Was auch immer der Grund dafür ist - die Crowdfunding-Kampagne, bei der das Standard-Modell der Gladius für 599 $ und das Advanced-Modell für 799 $ erhältlich ist (die später erwarteten Verkaufspreise liegen bei 1.599 $ bzw. 2.199 $), ist extrem erfolgreich: In weniger als neun Stunden bringen 582 Unterstützer 488.903 $ zusammen, wobei das Finanzierungsziel nur 30.000 $ betragen hat.

Im Juli 2018 folgt mit der Gladius Advanced Pro eine Unterwasserdrohne, die über vier Stunden lang bis zu einer Tiefe von 100 m tauchen kann. Das Spitzenmodell der Gladius-Reihe wiegt etwa 5 kg, verfügt über eine 4K-Kamera und 64 GB integrierten Speicherplatz - und auf dem Kontrollbildschirm gibt es eine Orientierungsanzeige, ein 3D-Modell des Gladius, das anzeigt, in welche Richtung das ROV gerichtet ist. Der Preis wird mit 2.199 $ angegeben.
Eine günstigere Gladius Standard Pro mit 16 GB Speicher, 1080p/60fps Kamera und einer Tauchtiefe von 50 m kostet 1.749 $. Im Oktober wird zudem eine noch kleinere Gladius Mini angekündigt, die 384 x 224 x 137 mm mißt, 2,5 kg auf die Waage bringt und einige zusätzliche Funktionen hat. So kann es in einem Neigungswinkel von plus oder minus 45° arretiert werden und besitzt neben den üblichen vier Triebwerken ein zusätzliches vertikales im Heck, das für mehr Stabilität sorgt. Das Mini-ROV ist für 1.099 $ vorbestellbar, der geplante Verkaufspreis liegt bei 1.299 $.
Im September 2019 wird dann eine Crowdfunding-Kampagne für die Unterwasserdrohne Dory gestartet, die dem Unternehmen 240.736 $ einbringt - bei einem Zielbetrag von nur 30.000 $. Die Dory mißt nur 247 x 188 x 92 mm, wiegt 1,3 kg, kann bis zu einer maximalen Tiefe von 15 m abtauchen und kommuniziert über ein elektrisches Kabel mit einer Wi-Fi-Boje an der Oberfläche. Zu den weiteren Merkmalen gehören drei vertikale und zwei horizontale Strahlruder und eine automatische Tiefenhaltefunktion. Die maximale Vorwärtsgeschwindigkeit beträgt 1,5 Knoten und die Batterien reichen für eine Stunde Betriebszeit aus. Der Preis während der Kampagne beträgt 349 $, der für später geplante Verkaufspreis liegt bei 499 $.

mit Greifarm
Im Mai 2020 folgt das Chasing M2 mit einem Gehäuse aus einer Aluminiumlegierung und acht vertikalen/horizontalen Schubdüsen, die dem ROV eine 360°-Manövrierfähigkeit verleihen. Außerdem sind diese Triebwerke so konstruiert, daß sie keine Fremdkörper wie Sand oder Unkraut einsaugen. Das Gerät wird zu einem Preis von 2.699 $ angeboten.
Der M2 erreicht eine Höchstgeschwindigkeit von 1,5 m/s, läuft pro Ladung des herausnehmbaren 2.500 mAh Lithium-Akkus 2 - 4 Stunden und kann bis zu einer maximalen Tiefe von 100 m tauchen. Bei dem Strom-/Kommunikationskabel kann zwischen einer Länge von 100 oder 200 m gewählt werden, was im letzteren Fall den Preis auf 2.899 $ erhöht. Für spezielle Aufgaben können zudem bis zu 1,5 kg zusätzliche Kameras, Scheinwerfer oder Werkzeuge anmontiert werden, wie z.B. ein optionaler Greifarm für 499 $.
Eine weitere, aber nicht ganz so ertragreiche Crowdfunding-Kampagne wie zuvor, folgt im Juli 2023 für eine CHASING F1 Pro genannte ,intelligente’ Angel-Drohne mit HD-Kamera, die funkferngesteuert an der Oberfläche schwimmt und ein Licht bis zu 20 m tief ins Wasser hängen läßt, das die Fische anlocken soll.

Im März 2024 stellt die Chasing Innovation auf der Messe Oceanology International in London dann das Modell Chasing X vor, das als Mini-ROV hauptsächlich für die Unterwasserinspektion von Schiffskörpern und Aquakulturanlagen entwickelt wurde, bei Bedarf aber auch Gegenstände greifen kann.
Die Chasing X mit einem Hauptkörper aus Kohlefaser weist ein deutlich aufgeräumteres Design auf als ihre Vorgänger, was durch eine spezielle Anordnung der elektrischen Schubdüsen möglich wird, bei der die insgesamt acht Schubdüsen in vier Zweiergruppen angeordnet sind, wobei jede Gruppe aus einer vertikalen/lateralen Schubdüse und einer vorderen/hinteren Schubdüse zusammengesetzt ist. Die Motoren ermöglichen eine Vorwärtsgeschwindigkeit von 4 Knoten und eine Tauchtiefe von 350 m.

mit Metalldetektor
Eine Ladung der austauschbaren 1.000 Wh Lithiumbatterie des ROV reicht für bis zu zwei Stunden Betriebszeit, doch das Gerät kann über eine Leine auch kontinuierlich von einer Energiequelle an der Oberfläche mit Strom versorgt werden.
Das jüngste Spielzeug-ROV zum Zeitpunkt des aktuellen Updates kursiert im Dezember 2024 in den Blogs. Dabei handelt es sich um eine Weiterentwicklung der Unterwasserdrohne Dory von 2019, die damals die günstigste Unterwasserdrohne der Welt war. Die neue Dory Explore ist technisch identisch mit dem Standardmodell, besitzt neben der Joystick-Fernbedienung aber auch einen Metalldetektor und ein Netz zum Schatzsammeln und kostet 479 $.
Die nur 1,1 kg schwere Drohne verfügt über fünf Schubdüsen, kann bis zu einer maximalen Tiefe von 15 m tauchen und ist über ein elektrisches Kabel mit einer Wi-Fi-Boje verbunden, die an der Oberfläche geschleppt wird. Die Steuer-App kommuniziert drahtlos mit der Boje über eine Entfernung von bis zu 15 m.
Ein weiteres, äußerst erfolgreiches Crowdfunding-Projekt,
das diesmal auf Kickstarter läuft und im Mai 2017 startet,
betrifft eine Unterwasserdrohne namens BIKI (o. BIKI
v1.0), die zum einen drahtlos gesteuert wird und zum anderen vorwärtskommt,
indem sie ihren fischartigen Schwanz bewegt. Das erste Feature wird
möglich, indem das Gerät in der Nähe der Oberfläche in Echtzeit über
eine App auf dem Smartphone des Nutzers gesteuert wird, die auch einen
Live-Feed der integrierten 4K/30fps-Kamera anzeigt.
Wenn die BIKI des in Peking ansässigen, 2015 gegründeten Unternehmens Robosea jedoch tiefer taucht, muß sie entweder einer in der App vorprogrammierten Tauchroute folgen oder sie kann in Echtzeit über eine wasserdichte Handfernbedienung gesteuert werden, die akustische Signale durch das Wasser sendet. Da die Fernbedienung allerdings nur eine Reichweite von 10 m hat, müssen Benutzer, die die Drohne in einer Tiefe von mehr als 10 m in Echtzeit steuern möchten, eine Tauchausrüstung anlegen und mit ihr hinuntergehen.

Die Drohne selbst kann bis zu 60 m tief tauchen, und unter Wasser verhindert ein Infrarot-Hindernisvermeidungssystems, daß sie mit Gegenständen zusammenstößt, und da sie mit GPS ausgestattet ist, kehrt sie automatisch zu ihrem Startpunkt zurück, wenn sie den Kontakt zu ihrem Bediener verliert.
Der Schwanzflossenantrieb wiederum, der viel leiser ist als Propeller, basiert auf einer Technologie der Universität Peking, die für Unterwasserroboter zur Erforschung der Antarktis entwickelt wurde. Solche Systeme werden ausführlich im Schwerpunkt Roboter-Fische der Jahresübersicht 2012 aufgeführt.
Eine Akkuladung der BIKI reicht für eine Betriebszeit von 90 - 120 Minuten, die Schwimmgeschwindigkeit wird mit 1,8 km/h angegeben und der aktuelle Preis während der Kampagne beträgt 599 $, der später geplante Verkaufspreis 1.024 $. Bis Juli beteiligen sich 411 Unterstützer mit insgesamt 222.232 $, um das Projekt zu verwirklichen, dessen Zielbetrag bescheidene 20.000 $ betragen hat.
Zu den weiteren Produkten der Firma gehören u.a. verschiedene professionelle ROVs, ein 2 m langer und mehr als 60 kg schwerer ROBO-SHARK für lang andauernde Unterwassereinsätze, ein bionischer Fisch namens ROBOLAB-GL für Ausbildung und Wissenschaft, ein solarbetriebener ROBO-CLEANER für offene Gewässer sowie Unterwasser-Antriebe für Taucher, die in einem späteren Schwerpunkt noch ausführlich vorgestellt werden.
Ebenfalls im Mai 2017 erscheint eine im Netz einsehbare
Studie über die bisherige Entwicklung bei unbemannten Unterwasserfahrzeugen
unter dem Titel ,Technology Development of Unmanned Underwater Vehicles
(UUVs)’. Die Autoren der relativ kurzen Übersicht sind Jinyeong
Heo und Yongjin
Kwon von der Ajou University sowie Junghoon
Kim von der Agency for Defense Development in Südkorea.
Ein Kamera-ROV, das bis zu 150 m tief tauchen kann, wird im Juni 2017 von der erst zwei Jahre zuvor gegründeten norwegischen Firma Blueye Robotics AS vorgestellt. Der neue Pioneer (o. Blueye Pioneer) wiegt 6,8 kg und manövriert mit Hilfe von drei Schubdüsen mit einer maximalen Unterwassergeschwindigkeit von 5 Knoten. Eine Ladung der austauschbaren Akkus soll für mindestens zwei Stunden Betrieb ausreichen.

Wie schon andere Modelle verfügt er über ein dünnes Kommunikationskabel, das zu einer Boje führt, die an der Oberfläche mitgeschleppt wird und über Wi-Fi mit einer App des Benutzers kommuniziert, solange sich dieser in einem Umkreis von 30 m von der Boje befindet.
Der Pioneer befindet sich derzeit in der Beta-Phase und soll im kommenden Januar in Produktion gehen. Er kann bereits vorbestellt werden und soll voraussichtlich 3.500 $ kosten. In diesem Preis ist ein 75 m langes Kabel zwischen Drohne und Boje enthalten - wer die vollen 150 m abtauchen möchte, muß ein längeres Kabel erwerben.
Spätere Produkte des Unternehmens sind professionelle ROVs wie das kompakte Blueye X1 mit Greifarmunterstützung für Inspektionen, Probenahmen und andere Meeresaufgaben, das ab 13.914 $ kostet, oder das noch leistungsstärkere Blueye X3, das zu Preisen ab 23.588 $ erhältlich ist. Die detaillierten technischen Spezifikationen finden sich auf der Homepage des Unternehmens.
In einem Gemeinschaftsprojekt der Blueye Robotics und der Technisch-Naturwissenschaftlichen Universität Norwegens (NTNU) wird als Teil der 2023 gestarteten SAFEGUARD-Initiative das Blueye-Drohnendesign später so weiterentwickelt, daß es ohne menschliche Steuerung eigenständig und dauerhaft unter Wasser eingesetzt werden kann. Das dabei entstehende autonome ROV trägt den Namen Blueye Minerva.
Ebenfalls im Juni 2017 berichten die Blogs erstmals über das bereits 2013 aus dem Massachusetts Institute of Technology (MIT) hervorgegangene Start-Up Open Water Power (OWP), welches ein Antriebssystem entwickelt hat, das Meerwasser aufnimmt, um eine Batterie zu aktivieren, die die Reichweite von Unterwasserdrohnen gegenüber herkömmlichen Lithium-Ionen-Batterien um das Zehnfache erhöht. Zudem ist die OWP-Batterie sowohl sicherer als auch haltbarer.
Ein Patent trägt den Titel ,Galvanic metal-water cell with nickel-molybdenum cathode’ (US-Nr. 11.069.883, angemeldet 2017, erteilt 2021), ein weiteres ,Electrochemical power system using aqueous dissolved oxygen’ (US-Nr. 10.680.253, angemeldet 2018, erteilt 2020).
Die Batterie besteht aus einer legierten Aluminiumanode, einer hauptsächlich nickellegierten Kathode und einem alkalischen Elektrolyten dazwischen. Wenn Meerwasser in das System eingesaugt wird, spaltet die Kathode es in Hydroxidanionen und Wasserstoffgas auf. Die Anionen reagieren mit der Aluminiumanode zu Aluminiumhydroxid und setzen Elektronen frei, die dann in den Stromkreislauf eingespeist werden.
Das Unternehmen arbeitet derzeit mit der US Navy zusammen, um die neuen Batterien in den akustischen Sensoren einzusetzen, die zum Aufspüren feindlicher U-Boote verwendet werden. Ein weiteres Pilotprojekt wird im Sommer mit dem Unternehmen Riptide Autonomous Solutions beginnen, dessen Unterwasser-Vermessungsdrohnen derzeit mit einer Akkuladung rund 185 km zurücklegen. Die OWP hofft, diese Reichweite mit der neuen Technologie auf 1.852 km erhöhen zu können.
Interessanterweise war die OWP bereits im Mai von der L3 Technologies (später: L3Harris Technologies Inc.) übernommen worden, die sich primär mit den Bereichen Luft- und Raumfahrt und Verteidigung befaßt. Nach der Übernahme wird die OWP als L3 Open Water Power Inc. weitergeführt und in die Sensor Systems Sparte von L3 integriert.

Eine weitere über Crowdfunding finanzierte Unterwasserdrohne ist die BlueWater 1 (o. Blue Water One, BW1) des im Vorjahr gegründeten chinesischen Start-Up YouCan (o. YouCan Robot), die im September 2017 auf indiegogo veröffentlicht wird. Dieses ROV kann bis zu einer maximalen Tiefe von 100 m abtauchen und dabei HD-Videos und Standbilder mit 4 Megapixeln aufnehmen. Die Kamera läßt sich dabei aus der Ferne nach oben oder unten schwenken, so daß der Benutzer sehen kann, was sich über oder unter der Drohne befindet, ohne das Vertikalstrahlruder einschalten zu müssen.
Ansonsten entspricht die BW1 den bisherigen Modellen. Sie besitzt zwei LED-Scheinwerfer und ist über ein 50 m langes elektrisches Seil mit einer Boje an der Oberfläche verbunden, die über Wi-Fi mit einer Steuerungs-App kommuniziert und eine Übertragungsreichweite von bis zu 200 m hat, die Länge der Leine nicht mitgerechnet. Eine Akkuladung soll für 3 - 4 Stunden normale Nutzung oder bis zu sieben Stunden ,leichte’ Nutzung ausreichen.

Der geplante Verkaufspreis liegt bei 1.699 $, wobei die BW1 während der Indiegogo-Kampagne für 749 $ erhältlich ist. Das Finanzierungsziel von 30.000 $ wird bis November klar überschritten, als 87 Unterstützer insgesamt 62.025 $ beitragen. Nun soll die Auslieferung im Januar 2018 beginnen.
In diesem Jahr läuft von August bis September eine weitere Kampagne auf Kickstarter, bei der es um eine 4,2 kg schwere Taucherdrohne namens BW Space geht, die ebenfalls bis zu einer maximalen Tiefe von 100 m abtauchen kann. Während die BW1 an einem Kommunikationskabel befestigt ist, das zu einer schwimmenden Wi-Fi-Boje führt, läuft die Leine des BW Space jedoch einfach zurück zu einem Wi-Fi-Modul an Land oder auf einem Boot. Auch in diesem Fall wird der Zielbetrag von 50.000 $ durch 147 Unterstützer überschritten, die gemeinsam 101.785 $ aufbringen, um das Projekt zu realisieren.

Pro Zoom
Ein weiteres Modell der YouCan ist 2019 das BW Space Pro Zoom für 1.699 $ (später 1.999 $), das kompakter ist als das Original und über eine stabilisierte Kamera mit 6-fach optischem Zoom verfügt. Zudem besitzt es ein zusätzliches vertikales Triebwerk, wodurch es beim Auf- und Abstieg horizontal waagerecht bleiben und sich vorwärts bewegen kann. Für das Filmen von Objekten, die sich über oder unter der Drohne bewegen, kann es auch einen Neigewinkel von plus oder minus 45° beibehalten. Außerdem gibt es das BW Space Pro Max mit mechanischem Greifer.
Im Juli 2023 folgt das deutlich leistungsstärkere Modell OceanEye, das auf den industriellen Einsatz ausgerichtet ist, wie die Inspektion von Pipelines, Brücken, Dämmen und Schiffen, Aufgaben in der Aquakultur, die Bergung, Suche und Rettung sowie die Meeresforschung.

Wie andere Unterwasserdrohnen ist auch das OceanEye über ein Kommunikationsseil mit seinem Betreiber an der Oberfläche verbunden. Käufer können zwischen einer festen Kamera oder einer Kamera mit 4-fachem optischen Zoom wählen, wobei in beiden Fällen vier LED-Scheinwerfer - zwei Fern- und zwei Abblendlichter - für die Beleuchtung sorgen. Filmmaterial und Fotos werden zudem auf einer integrierten 64-GB-Speicherkarte aufgezeichnet.
Das markanteste Merkmal des OceanEye sind jedoch die vier schubgesteuerten Motorgondeln, von denen jede zwei Motoren enthält, die in entgegengesetzte Richtungen gerichtet sind, so daß die Drohne mit insgesamt acht Motoren eine 360°-Manövrierfähigkeit aufweist. Das 5.499 teure Teil wiegt 5,6 kg und wird mit einem abnehmbaren Greifarm für die Fernsteuerung geliefert, es erreicht eine Höchstgeschwindigkeit von 2 m/s und eine maximale Tiefe von 100 m, und eine Ladung der 10.000 mAh Lithiumbatterie reicht für eine Laufzeit von 30 Minuten bis zu einer Stunde. Ein ähnliches Modell trägt den Namen ROV SeaBot.
Erstmals im November 2017 öffentlich vorgestellt wird der Prototyp des Imotus Hovering Autonomous Underwater Vehicle (HAUV) der kanadischen Firma Cellula Robotics Ltd. mit Hauptsitz in Burnaby, British Columbia. Dabei handelt es sich um ein Unterwasserfahrzeug für die Durchführung von Inspektionen in komplexen, beengten Räumen oder für Einsätze im offenen Wasser.
Das HAUV ist auf einer modularen Kernplattform aufgebaut, die das Robot Operating System (ROS) nutzt, um die Kommunikation zwischen den Navigationssensoren, dem Hauptcomputer und den Nutzlastmodulen über das Ethernet-Netzwerkprotokoll abzuwickeln. Um Navigation, Positionsbestimmung, Routenverfolgung und autonomen Betrieb in einer Vielzahl von Umgebungen mit begrenztem Raum zu ermöglichen, hatte die Firma spezielle Algorithmen zur simultanen Lokalisierung und Kartierung entwickelt. Das ROV kann mit oder ohne Glasfaserkabel betrieben werden und unter Wasser andocken, um sich aufzuladen, Missionsdaten herunterzuladen und Aufgaben zu aktualisieren.
Die Firma war 2005 mit dem Unterwasserbagger Fukada auf den Markt gekommen, einem Werkzeugschlitten für die effiziente Ausgrabung von Meeresböden und die Materialgewinnung. 2010 folgten die Geräte ROVDrill 3 und ROVDrill Mk sowie 2014 deren Nachfolger CRD100 für fortschrittliche Bohrungen am Meeresboden. Im späteren Verlauf kommen dann 2018 das AUV Envoy, im Jahr 2020 das AUV Envoy Lite, und 2022 das AUV Guardian hinzu, die bereits im Schwerpunkt der Glider und U-Boote behandelt wurden. Und 2023 wird mit dem HonuWorx das „weltweit erste Flottenkonzept für Unterwasserfahrzeuge“ vorgestellt.
Im Dezember 2017 schlägt die Finanzierung einer Unterwasserdrohne namens Allec fehl, die von dem im Vorjahr gegründeten dänischen Unternehmen Supportive Robotics aus Odense entwickelt worden war. Im Gegensatz zu den meisten bislang vorgestellten Versionen, die fast alle von ihren Benutzern an Land ferngesteuert werden, kann Allec sowohl per Fernsteuerung geführt werden, als auch selbständig autonome Missionen durchführen.

Im Fernsteuerungsmodus ist das ROV über ein 30 m langes Stromkabel mit einer mit Wi-Fi ausgestatteten Boje verbunden. Im autonomen Modus folgt es einem vorprogrammierten ,Flugpfad’, ähnlich wie viele Flugdrohnen dies können. Im Gegensatz zu diesen verwendet die Schwimmdrohne jedoch ein Koppelnavigationssystem aus Kompaß und Trägheitsmeßeinheit, um zu ermitteln, wie weit sie schwimmt und in welche Richtung. Außerdem verfügt sie über einen Drucksensor, mit dem sie feststellen kann, wie tief sie taucht, sowie über einen Wasserdurchflußmesser, mit dem sie ihre Geschwindigkeit messen kann.
Darüber hinaus besitzt Allec LED-Scheinwerfer, ein System zur Kollisionsvermeidung sowie ein KI-gestütztes Objekterkennungssystem, das die Identifizierung und Aufzeichnung von zehn Arten von Zielen wie Fischen, Seetang und Tauchern ermöglicht. Zu den weiteren Merkmalen gehören eine maximale Tauchtiefe von 50 m und eine Laufzeit der Wechselbatterien von über 1,5 Stunden.
Warum auch immer: Das ROV, an dem das Team seit 2012 arbeitet, wird trotz des günstigen Preises von ca. 650 $ von den potentiellen Kunden nicht angenommen - und statt den erhofften knapp 100.000 € kommen nur schlappe 5.585 € zusammen. Zwar wird im Mai 2018 über den 3D-Druck eines Folgemodells Allec Pro berichtet und eine entsprechende Animation veröffentlicht, doch mehr ist über die ganze Sache nicht zu hören.
Auf kommerzieller Ebene bereits erfolgreich ist hingegen das erst 2016 gegründete chinesisch-taiwanesische Unternehmen QYSEA (o. QYSEA Technology), das im Dezember 2017 mit seiner Unterwasserdrohne FiFish P3 in den Blogs erscheint. Bei einem Gewicht von 6 kg kann das ROV mit seinen drei Triebwerken bis zu einer maximalen Tiefe von 100 m abtauchen und ist über ein elektrisches Kabel direkt mit einer Doppel-Joystick-Steuerung verbunden, mit der es in Echtzeit ferngesteuert werden kann.

Im Übrigen besitzt die FiFish P3 eine Kamera für 4K-Aufnahmen, ein Objektiv mit einem weiten Sichtfeld von 162° und zwei LED-Scheinwerfer. Die Akkulaufzeit liegt bei zwei Stunden pro Ladung. Die Drohne soll in Kürze in den Handel kommen, die Preise für Vorbestellungen beginnen bei 2.999 $.
Im Mai 2020 folgt die Profitauchdrohne FiFish V6, die sich durch ihre besondere Manövrierbarkeit auszeichnet. So läßt sich das 3,9 kg schwere Gerät, das an einem 100 m Kabel hängt, in alle Richtungen rollen, kippen oder drehen, 360°-Rotationen mit eingeschlossen. Der größere Bruder der FiFish P3, die nur drei Schubdüsen hat, besitzt hierfür sechs: Die hinteren zwei davon sind horizontal, die mittleren zwei vertikal und die vorderen zwei sind in einem 45°-Winkel nach innen geneigt.
Die Linse der 4K-UHD-Kamera verfügt über ein Gesichtsfeld von 166° Grad und stellt bis zu einem minimalen Abstand von 40 cm scharf, für zusätzliche Beleuchtung sorgen zwei LED-Scheinwerfer. Im Posture-Locking-Modus behält die Drohne eine einmal eingenommene Position bei, die Höchstgeschwindigkeit wird mit 3 Knoten angegeben, die maximale Tiefe beträgt 100 m.
Eine einstündige Ladung des Lithium-Ionen-Akkus soll für bis zu vier Stunden Betriebszeit ausreichen. Der FiFish V6 ist zu Preisen ab 2.200 $ erhältlich. Darüber hinaus gibt es auch ein teureres V6S-Modell, das über eine Akkulaufzeit von sechs Stunden und einen Greifroboterarm verfügt.

mit ROV
Im Januar 2022 wird ein Hybridsystem namens Sea-Air Integrated Drone System vorgestellt, das aus einer Partnerschaft zwischen der QYSEA und dem japanischen Telekommunikationsbetreiber KDDI sowie dem ebenfalls japanischen Drohnenhersteller Prodrone Co. Ltd. entstand. Letzterer war 2016 international bekannt geworden, als er eine Drohne mit Armen präsentierte, die Dinge selbständig greifen und wieder absetzen kann (s.d.).
Die Idee hinter dem neuen System, das vor sechs Jahren von KDDI initiiert wurde, ist, daß es manchmal schwierig sein kann, Unterwasserdrohnen zum Ort ihrer Taucheinsätze zu bringen. Als Lösung soll daher eine Luftdrohne zum Transport und Einsatz einer Unterwasserdrohne verwendet werden. In dem Hybridsystem werden ein Allwetter-Multikopter von Prodrone und ein FiFish Pro V6 Plus ROV von QYSEA eingesetzt, das in einem Schnellverschlußkäfig an der Unterseite des Kopters untergebracht ist.
Ein menschlicher Bediener an Land fliegt das System zunächst über Langstrecken-Mobilfunk zu seinem Zielort - er wird dabei sowohl über GPS als auch über die Echtzeitdaten der Bordkameras des Multikopters geleitet. Anschließend landet er das Fluggerät auf dem Wasser, wo es auf den an jedem seiner sechs Arme angebrachten Schwimmern ruht. Das FiFish ROV wird anschließend aus seinem Käfig entlassen, bleibt aber durch ein langes Strom-/Kommunikationskabel mit dem Multikopter verbunden.
Das ROV führt dann seinen Tauchgang durch, ferngesteuert durch den Bediener, der nun das Videobild dessen Kamera beobachtet, das über den Kopter übertragen wird. Nach Abschluß des Tauchgangs wird der FiFish mit einer elektrischen Winde am Multikopter wieder in seinen Käfig gezogen, so daß die beiden Drohnen zum Ufer zurückfliegen können. Weitere Einzelheiten über das integrierte Sea-Air-Drohnensystem sollten im Laufe des Jahres veröffentlicht werden. Es läßt sich aber nichts darüber finden, auch nicht über eine kommerzielle Umsetzung.

Im Februar wird als weiterentwickelte Version das 2.999 $ teure Modell FiFish V6 Expert vorgestellt, das über ein robusteres Gehäuse sowie über einen Lithium-Akku mit höherer Kapazität verfügt (156 Wh im Vergleich zu 97 Wh beim V6), der eine Laufzeit von bis zu fünf Stunden pro Ladung erlaubt. Zudem besitzt die Expert eine Schnittstelle für die Montage einer Vielzahl optionaler Werkzeuge. Dazu gehören Greifarme, ein Metalldetektor, ein Sonarmodul, Wasserprobennehmer, eine Mini-Kreissäge, ein Laser-Entfernungsmesser sowie ein Laserscaler zur Messung der Größe von Unterwasserobjekten.
Im Juni kündigt die QYSEA ein System namens AI Vision Lock an, das es den FiFish-Drohnen ermöglicht, sich automatisch auf ein bestimmtes Ziel auszurichten. Die KI-basierte Vision-Plattform wird über eine aktualisierte Version der Steuerungs-App aktiviert, die einen Live-Feed der HD-Kamera der Drohne anzeigt. Der Nutzer tippt einfach auf das Bild des stationären Ziels auf dem Bildschirm, woraufhin die Drohne das Objekt in der Mitte des Bildes hält, bis sie eine andere Anweisung bekommt.
Mithilfe ihres internen Navigationssystems mit Koppelnavigation überwacht die Drohne ihre Ausrichtung und Position im dreidimensionalen Raum auf der Grundlage der Rückmeldungen von Beschleunigungsmesser und Gyroskop. Wenn sie feststellt, daß Strömungen oder andere Faktoren sie vom Ziel abbringen, aktiviert sie selektiv eines oder mehrere ihrer sechs Triebwerke, um dies auszugleichen.
Ein Jahr später folgt mit der 4,1 kg schweren FiFish V-EVO die „erste All-in-One-Unterwasserdrohne“, die mit einem Weitwinkelobjektiv ausgestattet ist und 4K-Videos mit 60 Bildern pro Sekunde aufnehmen kann. Ansonsten ähnelt das Gerät seinen Vorläufern, wobei es eine Höchstgeschwindigkeit von 3 Knoten (5,6 km/h) erreicht. Die Preise für die Fifish V-EVO beginnen bei 1.299 $ für ein Paket, das die Drohne, ein Halteseil und eine Tragetasche umfaßt.

(mit Greifer und Sonar)
Im Dezember 2023 kommt dann noch die FiFish E-GO dazu, die ein besonderes modulares Design hat. Ähnlich wie andere FiFish-Modelle hat die neue Unterwasserdrohne ein stromlinienförmiges Aluminiumgehäuse mit einer HD-Kamera und vier LED-Scheinwerfern an der Vorderseite sowie insgesamt sechs elektrischen Schubdüsen. Der Unterschied besteht jedoch darin, daß die Schubdüsen, die Kamera, die Scheinwerfer und die Batterien schnell entfernt und wieder eingesetzt werden können. Zudem können die externen Anschlüsse der Drohne bis zu sechs optionale Zusatzgeräte auf einmal aufnehmen - wie z.B. einen Greiferarm.
Da der E-GO mit zwei außen angebrachten Lithiumbatterien ausgestattet ist, können diese Batterien nacheinander durch frisch geladene Ersatzbatterien ersetzt werden, ohne daß die Stromversorgung unterbrochen wird. Eine Ladung dieser Akkus soll für eine Laufzeit von über 2,5 Stunden ausreichen. Eine weitere Neuerung ist die Verwendung von KI-basierten Algorithmen in der Steuerungssoftware.
Der E-GO, der zu einem Preis von 6.499 $ erhältlich ist, erreicht eine Höchstgeschwindigkeit von 3 Knoten und kann bis auf 100 m bzw. mit einem Upgrade auf 200 m hinabsteigen. Darüber hinaus soll er dank einer vergrößerten Propellerfläche um 30 % leistungsstärker sein als das nächstgrößere FiFish-Modell, der V6 Expert, der als Unterwasser-Produktivitätswerkzeug vermarktet wird.
Die Profitauchdrohnen des Herstellers werden nach dem Stand von 2025 in mehreren Baureihen angeboten: V für Sport-ROVs, E für industrielle ROVs, W für maritime ROVs und X für Missions-ROVs. Die näheren technischen Details finden sich auf der Firmenhomepage.
Im Februar 2018 startet eine Crowdfunding-Kampagne auf Indiegogo für ein ROV, das diesmal speziell für Heimwerker entwickelt wurde. Das von der im Vorjahr gegründeten spanischen Firma Nido Robotics entwickelte ROV Sibiu Nano soll entweder komplett zusammengebaut oder als Bausatz erhältlich sein. In jedem Fall ist es so konzipiert, daß es leicht auseinander- und wieder zusammengebaut werden kann, so daß Upgrades vorgenommen und Zubehör hinzugefügt werden kann. Außerdem ist die gesamte Hard- und Software quelloffen.
Der ca. 5,15 kg schwere Nano wird von sechs Schubdüsen angetrieben bzw. gelenkt und kann bis zu einer Tiefe von 100 m abtauchen. Seine austauschbare Lithium-Polymer-Batterie reicht für 1 - 3 Stunden Betrieb pro Aufladung, je nachdem, wie das ROV eingesetzt wird. Außerdem sind ein Satz Scheinwerfer sowie eine Kamera an Bord, die über ein 50 m langes Kabel Live-Videos an den Laptop des Benutzers überträgt. Dieser Computer wird auch zur Steuerung des Nano in Echtzeit verwendet, entweder über die Tastatur oder einen Gaming-Controller.
Während der Indiegogo-Kampagne wird ein komplett montiertes Modell für 1.114 $ angeboten. Bis März kommen von 41 Unterstützern 32.057 € zusammen - und die Auslieferung des Nano beginnt im Juli. Daneben gibt es auch den ROV Sibiu Pro, ein modulares System mit ca. 16 kg Gewicht, das verschiedene Nutzlasten bis in 300 m Tiefe tragen kann.
Spätere Varianten sind der Nano+ und der Sibiu HCEV, ein hybrider, ferngesteuerter Unterwasserroboter (HROV), der zwischen autonomem Betrieb und ferngesteuertem Modus wechseln kann und im Rahmen eines EU-finanzierten Forschungsprojekts entwickelt wurde. Nach 2022 gibt es aber keine weiteren Meldungen seitens des Unternehmens.
Auch der professionelle, formverändernde Aquanaut, der im Mai 2018 von dem texanischen Unternehmen Houston Mechatronics Inc. (HMI, später: Nauticus Robotics) vorgestellt wird, kombiniert zwei Arten von Unterwasserrobotern: ein schlankes, autonomes Unterwasserfahrzeug (AUV), das selbständig Daten sammelt, sowie ein größeres ferngesteuertes Fahrzeug (ROV), das Aufgaben erfüllen und dabei in Echtzeit gesteuert werden kann.

Die Firma wurde 2014 von einer Gruppe ehemaliger NASA-Roboterexperten gegründet und hat nun in einer Finanzierungsrunde B Mittel in Höhe von 20 Mio. $ bekommen.
Der Aquanaut, der sich noch in der Entwicklung befindet, soll in verschiedenen Modi arbeiten. Im Exkursionsmodus, bei dem der Körper geschlossen und stromlinienförmig ist, wird der 4.200 kg schwere Roboter von der Küste oder von einer Offshore-Anlage aus gestartet. In dieser Form hat er eine Länge von 4,82 m, eine Breite von 2,03 m und eine Höhe von 1,71 m.
Angetrieben von zwei Heckstrahlern fährt er dann autonom mit einer Höchstgeschwindigkeit von 6 Knoten und erreicht Tiefen von bis zu 3.000 m. Mit einer Ladung seines gut 100 kWh Akkus kann er eine Strecke von über 250 km zurücklegen und unterwegs Aufgaben wie akustische, optische und geochemische Fernerkundungen durchführen. Die Betriebszeit soll 30 - 70 Stunden betragen.
Sobald der Roboter ein bestimmtes Ziel erreicht, kann er in den Arbeitsmodus wechseln. Dabei öffnet sich sein Rumpf wie bei einem ,Transformer’, um zwei zusätzliche Triebwerke, zwei elektrische Manipulatorarme mit acht Freiheitsgraden und einen Nutzlastbereich freizulegen, der eine Kapazität von 90 kg hat.

Sein Sensorkopf erhält einen weiteren Freiheitsgrad, der es ihm ermöglicht, sich zu neigen und zu rollen, um eine gute Sicht auf die Aufgabe zu haben, die er ausführt. Der Aquanaut kann dann an Ort und Stelle schweben oder sich je nach Bedarf bewegen, bevor er selbständig nach Hause zurückkehrt.
Anders als ein normales ROV kommuniziert er jedoch nicht über eine Leine mit seinem Bediener, sondern über eine akustische Datenverbindung, die bis zu 10 km vom Fahrzeug entfernt sein kann, sowie über eine Satellitenverbindung zu einem zentralen Netzwerkpunkt. Das Unternehmen strebt an, die ersten voll funktionsfähigen Aquanauten bis Ende 2019 zum Verkauf bereitzustellen.
Ebenfalls im Mai 2018 läuft die nächste Kickstarter-Kampagne, bei der es diesmal um eine Nemo genannte Unterwasserdrohne geht, die neben den üblichen Standardfunktionen einige interessante Extras aufweist. Die von der 2015 gegründeten chinesischen Firma Aquarobotman (o. Shenzhen Aquarobotman Science & Technology Co.) entwickelte und hergestellte Drohne kann mit einer Höchstgeschwindigkeit von 3,9 Knoten bis zu einer maximalen Tiefe von 100 m abtauchen und ist über ein mit Kevlar verstärktes elektrisches Kabel, das auf eine Spule aufgewickelt ist, mit dem an der Oberfläche befindlichen Benutzer verbunden.

Ein Wi-Fi-Modul auf dieser Spule kommuniziert drahtlos mit einer App des Benutzers, über die die Drohne in Echtzeit gesteuert werden kann. Der Nemo filmt und zeichnet 4K/30fps-Videos sowie 16-Megapixel-Standbilder auf, die an den Benutzer gestreamt werden. Anstatt das Video nur auf dem Bildschirm des Mobilgeräts zu sehen, besteht auch die Möglichkeit, eine VR-Brille zu verwenden. Die Unterwasserbeleuchtung erfolgt über zwei Gruppen von je vier LED-Scheinwerfern.
Der Nemo, der anderen Quellen zufolge schon seit 2016 auf dem Markt sein soll, wird mit zwei horizontalen und zwei vertikalen Schubdüsen stabilisiert, und eine 1,5-stündige Ladung des 48 Wh Akkus soll für eine Betriebszeit von drei Stunden ausreichen. Der Akku ist zudem austauschbar, während der Akku der Wi-Fi-Einheit sechs Stunden hält.
Im Zuge der Kampagne wird die Unterwasserdrohne mit einem 30 m langen Kabel für 799 $ angeboten, der geplante Verkaufspreis liegt bei 1.799 $. Eine Version mit einem 100 m Kabel soll dann 2.599 $ kosten. Bis Juni kommen von 78 Unterstützern 84.078 $ zusammen, um das Projekt zu verwirklichen, was beträchtlich über dem Zielbetrag von 30.000 $ liegt. Die für Juli geplante Auslieferung verzögert sich allerdings bis Oktober.
Im Jahr 2019 erweitert die Firma ihr Angebot um einen Unterwasser-Jet namens Sea Scooter (o. MagicJet Sea Scooter) zum Tauchen. Diese Wassersportgeräte werden in einer späteren Übersicht präsentiert. Daneben gibt es mit den Modellen AQUA-B2, AQUA-B3 und AQUA-B4 auch noch drei industrietaugliche Unterwasserroboter.
Zeitgleich führt auch die 2016 gegründete chinesische Firma Navatics Technology Ltd. eine Kickstarter-Kampagne durch, die noch wesentlich erfolgreicher ist, denn hier wird der Zielbetrag von 30.000 $ bis Juli weit übertroffen, als 96 Unterstützer 114.411 $ beisteuern. Möglicherweise, weil die Initiatoren behaupten, daß ihr ROV MITO (o. Navatics MITO) stabilere Videos als alle anderen Unterwasserdrohnen aufnimmt.

Wie einige andere Modelle hat die MITO ein 50 m langes Kabel, das zu einer Boje führt, die sie an der Oberfläche mitschleppt. Die Boje wiederum kommuniziert drahtlos mit einer tragbaren Fernbedienungseinheit bis zu einer Entfernung von 500 m. Videos werden mit 4K aufgezeichnet, ebenso wie 8-Megapixel-Standbilder, und an den Benutzer gestreamt. Für die richtige Ausleuchtung sorgen zwei LED-Scheinwerfer.
Um durch Unterwasserströmungen verursachte Orientierungsänderungen zu erkennen, denen er dann durch die selektive Aktivierung seiner zwei vertikalen und zwei horizontalen Schubdüsen entgegenwirkt, verwendet der MITO eingebaute Sensoren und einen Vier-Achsen-Stabilisierungsalgorithmus. Außerdem kann die Drohne so eingestellt werden, daß sie einen Neigungswinkel von bis zu +/- 45° beibehält, während sie sich vorwärts bewegt, wodurch sie einem sich bewegenden Objekt folgen kann, während sie es von oben oder unten betrachtet.
Eine Ladung des Lithium-Polymer-Akkus soll für 2 - 4 Betriebszeit ausreichen, wobei bei Bedarf ein optionaler Zusatzakku für 150 $ eingesetzt werden kann. Die maximale Tauchtiefe der Drohne beträgt 40 m. Im Zuge der Kickstarter-Kampagne kostet ein Exemplar 1.199 $, später soll der Preis bei 1.999 $ liegen.
Über eine Entwicklung, die für alle Arten von ROVs wichtig werden kann, wird im April 2018 berichtet. Demzufolge haben Abdullah Al-Halafi und Basem Shihada an der König-Abdullah-Universität für Wissenschaft und Technologie (KAUST) in Saudi-Arabien ein neues optisches Unterwasser-Funkkommunikationssystem (underwater wireless optical communication, UWOC) konstruiert, das die einschränkenden Faktoren von ROVs überwindet, über eine lange Leine mit einem Schiff an der Oberfläche verbunden sein zu müssen, damit die Bediener sehen können, was die Kameras der ROVs sehen.

der KAUST
Das neue Zwei-Wege-System, das Laser zur drahtlosen Übertragung von Ultra-HD-Videos durch das Wasser verwendet, sendet und empfängt erfolgreich Signale durch bis zu 4,5 m tiefes, klares Meerwasser ebenso wie durch schlammiges Hafenwasser. Es umfaßt eine Unterwasserplattform, die ultrahochauflösendes Digitalvideo in eine Reihe extrem schneller Impulse umwandelt, welche von einer grünen 520 nm Laserdiode ausgesendet werden.
Diese Impulse bilden einen Downlink-Kanal, der sich durch das Wasser bewegt und von einem mit Fotodioden ausgestatteten Empfänger aufgefangen wird, der sie wieder in ein Echtzeit-Video umwandelt. Dieser Empfänger wiederum verwendet einen blauen 450 nm Laser, um einen Uplink-Kanal zu bilden, der Daten zurück an die Unterwasserplattform sendet. Die auf dem Uplink-Kanal übertragenen Daten könnten auch Befehle enthalten, mit denen die Betreiber das ROV fernsteuern könnten.
Das UWOC-System wurde bislang allerdings nur in einem Labor getestet. Die Studie mit dem Titel ,UHD Video Transmission Over Bidirectional Underwater Wireless Optical Communication’ ist im Netz einsehbar. Zur Erinnerung: Ein ähnliches System, das Blaulicht-LEDs verwendet, war bereits 2010 von Wissenschaftlern der Woods Hole Oceanographic Institution vorgestellt worden (s.o.).
Ein ROV namens Boxfish gilt Berichten vom Juli 2018 zufolge als der neueste Stand der Technik bei professionellen Unterwasserkamera-Drohnen. Der 30.000 $ teure ROV der 2016 gegründeten Firma Boxfish Research Ltd. in Auckland, Neuseeland, ist ein 25 kg schweres Profigerät mit acht Schubdüsen, einer lichtstarken Beleuchtung und einer maximalen Tauchtiefe von 1.000 m. Er ist mit einer 4K-Kamera ausgestattet, die unkomprimierte UHD-Videos an die Basisstation streamt und durch Ultra-Weitwinkel-Pilotkameras an der Vorder- und Rückseite ergänzt wird, die es ermöglichen, die Aufgaben von Pilot und Kameramann zu trennen.

Der Boxfish verwendet eine acht um das Gerät herum montierte vektorielle Schubdüsen, die alle in verschiedene Richtungen zeigen und die Drohne mit ihrer Schubkraft antreiben. Eine automatische Stabilisierung sorgt für gleichmäßige Aufnahmen und der eingebaute Navigationscomputer hilft dabei, herauszufinden, wo sich das Gerät befindet. Funktionen wie Steuerkurs-, Tiefen- und Lagesicherung sowie automatischer Aufstieg machen es einfach, das ROV zu steuern.
Die Seilspindel bietet ein leichtes, 1.500 m langes Seilkabel, das dem Boxfish seine enorme Reichweite über die drei- bis sechsstündige Lebensdauer des integrierten Akkus verleiht. Anderen Quellen zufolge soll das patentierte ROV bis zu 15 Stunden lang laufen. Die Auslieferung beginnt im September.
Im Jahr 2021 entwickelt das Unternehmen zudem ein kabelloses und tragbares Boxfish AUV, das für Tiefen von 300 m bzw. 600 m erhältlich ist, um den wachsenden Bedarf an autonomen Offshore-Inspektionen zu decken. Weitere Geräte der Firma sind das Boxfish Alpha und das Boxfish Luna.
In die gleiche Zeitspanne zwischen Juni und Juli 2018 fällt der Finanzierungszeitraum für die mit einem reddot award ausgezeichnete Unterwasserdrohne Titan des 2013 gegründeten chinesischen Herstellers Geneinno (o. Shenzhen Geneinno Technology Co. Ltd.; früher: Shenzhen Sankaida Optoelectronics Technology Co. Ltd.), der sich gleichzeitig bei kickstarter und indiegogo Geld beschafft - und letztlich beträchtliche Mittel in Höhe von 247.280 $ einsammelt, wobei der Zielbetrag nur 50.000 $ betragen hat. Die erfolgreiche Gestaltung stammt von dem Designer Eddie Zhang von Innozen Design.

Die Drohne ist mit einer 4K Kamera ausgestattet und die Polymer-Lithium-Batterien erlauben es, bis zu vier Stunden Filmmaterial in Tiefen von bis zu 150 m aufzunehmen. Wie üblich wird das Video in Echtzeit über ein angeschlossenes Kommunikationskabel an den Benutzer übertragen, das auch zur Weiterleitung von Steuerbefehlen an die Drohne verwendet wird.
Die Titan besitzt leistungsstarke LED-Leuchten auf jeder Seite der Kamera und kann sich dank der sechs Hochleistungs-Triebwerke, die mit einem präzisen Steuerungsalgorithmus geführt werden, sogar gegen starke Strömungen behaupten. Für einen Preis von 1.399 $ während der Kampagne erhält man neben der Drohne selbst einen robusten Hartschalen-Rollkoffer, ein 50 m langes Kabel sowie rote und violette Tauchfilter, die für eine Farbkorrektur bei Aufnahmen in Wassertiefen von 5 - 21 m sorgen.

Manipulatorarm
An der Unterseite des Titan befindet sich ein Anschluß für Zubehör, der Erweiterungen für verschiedene Tauchzwecke ermöglicht. Dies wird im Januar des Folgejahres aktuell, als Geneinno auf der CES 2019 den Prototyp eines motorisierten Manipulatorarms für die Titan vorstellt. Mit einer Länge von 521 mm wiegt der Manipulator an Land 907 g, aber unter Wasser sinkt das Gewicht auf 408 g. Sein Zangengreifer kann sich bis zu einer maximalen Breite von 114 mm öffnen und eine Greifkraft von bis zu 7,7 kg aufbringen.
Es ist noch nicht bekannt, wann und zu welchem Preis der Manipulatorarm, der auch gegen andere Werkzeuge ausgetauscht werden kann, im Handel erhältlich sein wird. Das Unternehmen hat außerdem den Prototyp eines Hydrophons entwickelt, das an der Titan angebracht werden kann und die Aufnahme von Unterwassergeräuschen ermöglicht.
Im November 2020 erscheint das Nachfolgemodell der Titan. Die T1 Pro Drohne ist ebenfalls mit sechs Schubdüsen - vier vertikal, zwei horizontal - sowie einer 4K Kamera und zwei LED-Scheinwerfern ausgestattet und kann bis zu 175 m tief tauchen. Das neue Modell hat eine maximale Vorwärtsgeschwindigkeit von 2 m/s und kann mit seinem 97,2 Wh Akku vier Stunden lang betrieben werden. Mit einem optionalen Zweitakku kann er acht Stunden laufen.

Zu den weiteren optionalen Anbauteilen gehören ein neuer und verbesserter Greifarm, ein 360°-Sonargerät, ein seitlicher Antrieb für seitliche Bewegungen, eine nach unten gerichtete Kamera mit zwei LEDs, ein Sensor für die Wasserqualität, pH-Wert, gelösten Sauerstoff, Ammoniak-Stickstoff und die Leitfähigkeit des Wassers mißt, sowie ein Laserscaler, der die Größe von Unterwasserobjekten mißt, indem er zwei präzise aufeinanderfolgende Laserstrahlen auf sie projiziert. Die Geneinno T1 Pro kann zum Preis von 2.999 $ bestellt werden und soll im Folgemonat ausgeliefert werden.
Im Juli 2019 folgen Berichte über den kugelförmigen Robotic Explorer UX-1 (o. UX-1a), der im Rahmen des EU-Projekts UNEXMI (Underwater Explorer for Flooded Mines) entwickelt wurde und überflutete Tunnel verlassener Minen bis in eine Tiefe von 500 m kartieren soll. Der ROV ist hierzu mit fünf Digitalkameras und rotierenden Laserlinienprojektoren ausgestattet, mit denen er dreidimensionale Karten der Minenstollen erstellt, während er autonom durch sie hindurchschwimmt. Der Antrieb erfolgt über versenkte Schubdüsen, die von einer Lithiumbatterie gespeist werden, welche eine Laufzeit von bis zu fünf Stunden pro Ladung ermöglichen soll.
Zum Hintergrund: Viele der rund 30.000 stillgelegten Bergwerke in Europa wurden nicht aufgegeben, weil es keine Mineralien mehr gab, sondern aufgrund technologischer und wirtschaftlicher Herausforderungen, die nun möglicherweise überwunden werden können. Da einige der Minen vor bis zu einem Jahrhundert aufgegeben wurden und sich danach auf natürliche Weise mit Grundwasser füllten, sind die früher erstellten Karten der Stollen möglicherweise nicht mehr genau und weisen auch nicht auf Merkmale wie Höhleneinbrüche hin.

UX-1
Die Entsendung von Tauchern zur Kartierung der Stollen wäre allerdings sehr riskant, und das Abpumpen des Wassers und die anschließende Suche nach Mineralien sind nicht sehr kosteneffizient. Aus diesem Grund ist der UX-1, dessen Prototyp bereits in überfluteten Bergwerken in Finnland, Slowenien, Portugal und dem Vereinigten Königreich getestet wurde, auch mit einer Multispektralkamera, einem Gammastrahlungsdetektor und einem System zur Entnahme von Wasserproben ausgestattet, mit denen er nach verbleibenden Mineralvorkommen suchen kann. Sollten dabei nennenswerte Vorkommen gefunden werden, wäre es denkbar, die Mine auszupumpen und wieder zu öffnen.
Die Studie ,Modeling and Control of Underwater Mine Explorer Robot UX-1’ der spanischen Universidad Politécnica de Madrid, des INESC-TEC in Portugal und des italienischen Politecnico di Milano ist im Netz einsehbar.
Das UNEXMIN-Projekt wird im September 2019 beendet, doch schon im Januar 2020 startet mit einer Laufzeit von 36 Monaten das Folgeprojekt UNEXUP, dessen Ziel es ist, die Hardware, die Software und die allgemeinen Fähigkeiten des Systems weiter zu verbessern und gleichzeitig die Technologie auf den Markt zu bringen. Im Zuge des Projekts wird der UX-1Neo entwickelt, der autonom unter Wasser arbeitet.
Im Juni 2021 wird in Ungarn die erste kommerzielle Mission mit dem UX-1Neo durchgeführt, Einsatzort ist der Csor-Brunnen, eine Trinkwasserquelle im Westen des Landes. Dabei wird eine detaillierte 3D-Karte der Struktur des Brunnens erstellt, ohne daß der Brunnen entwässert oder Menschen zur Vermessung geschickt werden müssen - was das Wasser kontaminiert hätte. Ziel ist es, Daten zu gewinnen, die es den Ingenieuren ermöglichen, den Wiederaufbau des Brunnens zu planen. Die Abschlußkonferenz von UNEXUP findet im November 2022 in Brüssel statt.
Im Januar 2020 startet das von der EU finanzierte Projekt SeaClear (SEarch, identificAtion and Collection of marine Litter with Autonomous Robots), das bis zum Dezember 2023 laufen wird und darauf abzielt, autonome Roboter zum Auffinden und Sammeln von marinem Müll zu entwickeln, insbesondere auf dem Meeresboden, wo noch viel mehr Müll liegt als auf den Weltmeeren treibt. Die aktuellen Schätzungen sprechen von 26 - 66 Millionen Tonnen Abfall, von denen sich etwa 94 % auf dem Meeresboden befinden.
An dem von der Technischen Universität Delft koordinierten Projekt sind Forscher und Industrievertreter aus fünf Ländern beteiligt. Zu den Partnern gehören das deutsche Fraunhofer-Zentrum für Maritime Logistik und Dienstleistungen (CML), die Technischen Universitäten München, Dubrovnik und Cluj-Napoca, die Firma SubSea Tech, die Hamburger Hafenbehörde und die Regional Development Agency Dubrovnik (DUNEA). Das Gesamtbudget beträgt rund 5 Mio. €.

Das Basissystem, das vor allem in Küstengebieten eingesetzt werden soll, da dort der meiste Müll aus den Flüssen ins Meer gelangt, soll aus vier Roboterfahrzeugen bestehen: einer Drohne in der Luft, zwei ROVs und einem unbemannten Überwasserschiff SeaCAT, das als Mutterschiff dient. Letzteres wird die beiden ROVs über Versorgungskabel mit Strom versorgen und die übertragenen Daten über einen Bordcomputer verarbeiten.
Zunächst werden die Drohne und das kleinere ROV eingesetzt, um Müll an der Oberfläche bzw. in der Wassersäule aufzuspüren, denn wenn in diesen beiden Bereichen Müll vorhanden ist, dann ist er wahrscheinlich auch auf dem Meeresboden an dieser Stelle reichlich vorhanden. Das zweite ROV wird dann über dem Meeresboden entlangfahren und mit einem speziell entwickelten Greifer und einer Saugvorrichtung den Müll einsammeln, der anschließend zum Oberflächenschiff gebracht und in einem Behälter gesammelt wird.
Algorithmen, die auf künstlicher Intelligenz basieren, helfen der Drohne und dem ersten ROV, zwischen Müll und Meerestieren usw. zu unterscheiden - ebenso wie sie dem zweiten ROV helfen, zwischen Müll und Korallen oder anderen natürlichen Strukturen unter Wasser zu unterscheiden. Zum Einsatz kommen die ROVs Mini Tortuga zur Inspektion bis in eine Tiefe von 300 m, sowie Tortuga, der mit einem Greifer bzw. einer Saugmechanik zum Einsammeln und Entfernen von Unterwassermüll ausgerüstet ist. Die Geräte stammen von der erwähnten französischen Firma Subsea Tech aus Marseille.
Im Oktober 2022 wird ein Prototyp von SeaClear in einer Tiefe von 20 - 30 m sowohl im Hamburger Hafen als auch an der Küste von Dubrovnik in Kroatien getestet, da sich die beiden Standorte stark voneinander unterscheiden - der Hafen ist geschäftig, industriell und hat ziemlich schlammiges Wasser, während die kroatische Küste viel ruhiger, klarer und touristisch geprägt ist. Eine Plastikflasche ist der erste offizielle Abfall, der vom Meeresboden aufgesammelt wird.
Das Ziel ist es, das SeaClear-System kommerziell nutzbar zu machen. Die Ergebnisse des Projekts sollen sowohl durch den Verkauf des Systems als auch durch die Bereitstellung als Dienstleistung für lokale Behörden, Häfen oder andere Akteure genutzt werden.

der TUM
Über den nächsten Schritt wird im September 2025 berichtet, als im Hafen von Marseille in Südfrankreich ein neuer autonomer Roboter eingesetzt wird, der Abfälle birgt, die auf den Meeresgrund gesunken sind. Der Tauchroboter, der Müll selbständig erkennt und einsammelt, wurde von einem Forschungsteam der Technischen Universität München (TUM) entwickelt und ist Teil der laufenden, zweiten Phase des Projekts SeaClear (o. SEACLEAR 2.0).
Das Gesamtsystem besteht aus einem unbemannten Serviceboot mit Beiboot, einer Flugdrohne, einem kleinen Unterwasser-Suchroboter und dem Tauchroboter. Wozu die Flugdrohne da ist, geht aus den Berichten nicht hervor. Das Serviceboot versorgt die Unterwasserroboter über ein Kabel mit Strom und Daten. Gleichzeitig sendet es Ultraschallwellen aus, um den Meeresboden grob zu kartieren. Ein etwa 50 cm langer Suchroboter scannt den Boden dann schnell und effizient. Mit diesen Informationen taucht das TUM-U-Boot, das von acht an seinem Rahmen montierten Propeller-Turbinen angetrieben wird, gezielt zu den Müllstellen ab.
Der KI-gestützte Unterwasserroboter ist mit vier klauenartigen Greifern ausgestattet und verfügt über eine Kamera und ein Sonar, um Müllobjekte zu erkennen, sie in 3D darzustellen und so gezielt zu greifen. Anschließend lädt er die Objekte, die bis zu 250 kg wiegen können, per Seilwinde auf das zusätzliche autonome Beiboot, das wie ein schwimmender Müllcontainer funktioniert. Laut den Entwicklern rechnet sich der Einsatz des Unterwassermüllroboters bereits ab einer Wassertiefe von 16 m.
Ebenfalls im Januar 2020 wird
berichtet, daß unter der Leitung von Rich Camilli ein
Team der Woods
Hole Oceanographic Institution (WHOI), die uns im Laufe
dieser Übersicht schon mehrfach begegnet ist, eine auf KI basierende automatisierte
Planungssoftware entwickelt hat, die für den Einsatz mit
ROVs konzipiert ist und deren mühsame manuelle Steuerung über eine
mit einem Joystick ausgestattete Konsole ersetzen soll.

Bereits im Vormonat wurde die Technologie auf einem bestehenden WHOI-ROV, dem Neried Under Ice (NUI), bei der Erkundung des Unterwasservulkans Kolumbo vor der Küste der griechischen Insel Santorin in einer Tiefe von 500 m zum Einsatz gebracht. Dort konnte das ROV mit Hilfe des neuen Systems selbständig entscheiden, welche Stellen es besuchen wollte, um dann an diesen Stellen autonom Proben vom Meeresboden zu nehmen.
Das System wurde im Rahmen des Programms PSTAR (Planetary Science and Technology from Analog Research) der NASA entwickelt und könnte eines Tages tatsächlich bei der unbemannten Erforschung von Ozeanen auf anderen Planeten zum Einsatz kommen. In der näheren Zukunft arbeitet das Team jedoch an einer natürlichsprachlichen Schnittstelle, die es ermöglichen würde, direkt mit autonomen ROVs zu kommunizieren, sowie an einem Netzwerk, das es mehreren ROVs erlaubt, als kollaborative Flotte zusammenzuarbeiten.
Wie im Februar 2020 gemeldet wird, entwickeln der Wasserrettungsdienst Halle e.V. (Saale), die Bäder Halle GmbH und der Institutsteil für Angewandte Systemtechnik (AST) des Fraunhofer Instituts für Optronik, Systemtechnik und Bildauswertung (IOSB) unter der Leitung des Informatikers Helge Renkewitz einen autonomen Wasserrettungsroboter, der künftig in Schwimmbädern und Freigewässern zum Einsatz kommen soll, um Menschen vor dem Ertrinken zu retten. Das Vorhaben wird vom Bundesministerium für Wirtschaft und Energie (BMWi) gefördert.
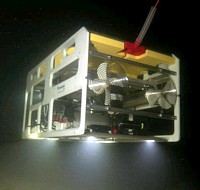
roboter
Die ferngesteuerten sowie die autonomen Fahrzeuge des Instituts werden bereits seit Jahren erfolgreich auf dem internationalen Markt verkauft. Über das mehrfach prämierte autonome DEDAVE, auf dem der neue, zum Patent angemeldete Rettungsroboter basiert, wurde unter dem Schwerpunkt Glider und U-Boote schon ausführlich berichtet (s.d.).
Im Fall des Rettungsroboters registrieren an der Hallendecke eines Schwimmbads angebrachte Überwachungskameras die Bewegungsmuster und die Position des Ertrinkenden im Becken und senden die Koordinaten an den Roboter. Dieser befindet sich in einer Dockingstation am Boden des Beckens, die sich daraufhin öffnet. Hat das Fahrzeug sein Ziel erreicht, ortet es mit Hilfe von Kameras die gefährdete Person und befördert diese an die Wasseroberfläche.
An Badeseen und Außenbecken übernehmen Flugdrohnen, Ballon- oder Zeppelinsysteme die Aufgabe der Decken-Überwachungskameras. Für die Rettung im Badesee, wo das Wasser trübe ist, muß das Unterwasserfahrzeug jedoch mit akustischen anstelle von optischen Sensoren ausgestattet sein.

mit Dummy
Mithilfe des Echos der Schallwellen lassen sich Lage und Ausrichtung von Personen dann so exakt bestimmen, daß der Roboter die Zielperson autonom ansteuern und aufnehmen kann.
Im November dient ein Schwimmbad in Halle als Testfeld für das erste Demonstrationsgerät. Dabei verhindert eine Fixier- und Fangvorrichtung, daß leblose Körper beim Auftauchen herunterrutschen. Diese Vorrichtung läßt sich auch auf andere Unterwasserfahrzeuge montieren.
Im April 2024 wird gemeldet, daß dem KI-gestützten Robotersystem bei einer Freiwasser-Übung im Hufeisensee bei Halle erstmals die Bergung einer ,Person’ aus einem See gelungen sei. Hierbei wurde ein in 3 m Tiefe abgelassener, 80 kg schwerer Dummy von einem Sonobot 5 des Berliner Unternehmens EvoLogics auf dem Grund des Sees entdeckt und dann von dem Rettungsroboter aufgenommen, fixiert, innerhalb einer Sekunde an die Wasseroberfläche befördert und auf dem kürzesten Weg die Strecke von 40 m zurück zum Ufer gebracht.
Der Sonobot 5, ein kleines, einfaches und benutzerfreundliches Oberflächenfahrzeug für die Planung und Durchführung hydrographischer Vermessungen, ist in der Lage, auf der Suche nach Personen und Objekten große Wasserflächen in wenigen Minuten zu überprüfen.

Mit seinem Sedimentsonar dringt es tief in den Seegrund ein und macht verborgene Strukturen als 3D-Bilder sichtbar. Die komplette Rettungsaktion dauert gut zwei Minuten, was innerhalb der kritischen Zeitspanne von fünf Minuten liegt, in denen Verunglückte reanimiert werden müssen, um dauerhafte Schäden auszuschließen.
Zum praktischen Einsatz kommt der Unterwasserroboter dann erstmals beim Brückenspringen im August 2025 in Halle, um die Einheiten der DRK Wasserrettung unter der Giebichensteinbrücke in Echtzeit zu unterstützen. Der aktuelle, mit Batterien, Antrieb, Kameras, optischen und Navigationssensoren ausgestattete Prototyp mißt 90 x 50 x 50 cm, soll aber weiter miniaturisiert werden, um in Zukunft kleiner, leichter und kostengünstiger auszufallen als der jetzige Unterwasserroboter. Außerdem soll die künftige Version das stromlinienförmige Design eines Rochen bekommen.
Eine ebenfalls im Februar 2020 in den Blogs präsentierte Unterwasserdrohne, die bislang allerdings nur als Entwurf existiert, stammt von dem Designbüro Sprout Studios sowie der gemeinnützigen Forschungs- und Entwicklungseinrichtung für technische Innovation Draper in Boston. Dabei handelt es sich um eine autonome Drohne, die durch die Ozeane schwimmt, um im Wasser befindliche Plastik-Mikropartikel aufzuspüren, zu analysieren und herauszufinden, woher das Mikroplastik stammt und wo es am stärksten auftritt.

(Grafik)
Wenn das AUV eingesetzt wird, gleitet es durch die obersten 9 m des Wassers, wo sich das meiste Mikroplastik befindet, scannt die Umgebung nach den Partikeln, testet sie auf bestimmte Arten und überträgt schließlich die GPS-Koordinaten der Fundstelle an die Zentrale. Die autonome Drohne nutzt Schubdüsen und Ruder, um ihre Navigation zu steuern, während GPS und eingebaute Näherungssensoren helfen, durch Flüsse und Ozeane zu navigieren.
Die zentrale Verarbeitungseinheit befindet sich an der Vorderseite des Geräts. Sie saugt Wasser von vorne an, prüft es und leitet es über einen hinteren Auslaß wieder ab, während der Ring um die Drohne die Batterie und die Elektronik beherbergt. Sobald der Akku zur Neige geht, macht sich die Drohne auf den Weg zur nächstgelegenen Andockboje, die das Gerät auflädt. Das Ziel wäre, daß eine ganze Flotte dieser Drohnen gleichzeitig mit einer einzigen Ladeboje in der Nähe arbeitet.
Wie auf der Grafik zu sehen ist, nutzt die Boje selbst einen kleinen Savonius-Senkrechtachser, um ihre stationären Akku mit Windenergie aufzuladen, der wiederum die Drohnen versorgt. Wie sich herausstellt, war das elegante AUV-Konzept bereits im November des Vorjahrs auf der Liste der besten Erfindungen 2019 des Magazins TIME gelandet. Es ist allerdings nichts darüber zu finden, daß anschließend an einer Umsetzung gearbeitet wurde.
Eine Studie mit dem Titel ,SAUV—A Bio-Inspired Soft-Robotic Autonomous Underwater Vehicle’, die im Februar 2020 erscheint und im Netz einsehbar ist, beschreibt die Ergebnisse der Arbeiten eines interdisziplinären Teams des Bionik-Innovations-Centrums (B-I-C) an der Hochschule Bremen (HSB) um die Professoren Susanna Labisch und Jan-Henning Dirks, bei denen ein neues bio-inspiriertes, flexibles autonomes Unterwasserfahrzeug (SAUV) entwickelt wurde, das wesentlich sicherer zu bedienen ist als herkömmliche Systeme.

(Grafik)
Wenn konventionelle AUVs mit ihrer Umgebung kollidieren, können sie schwere Schäden an sich selbst und ihrer Umwelt verursachen oder sogar begleitende Taucher gefährden. Um solche Unfälle zu verhindern, ist hochentwickelte Steuerungshardware erforderlich. Biologische Organismen wie Pantoffeltierchen oder Quallen verschwenden hingegen kaum Ressourcen für die präzise Kontrolle ihrer Bewegung, um Kollisionen zu vermeiden. Sie stoßen einfach gegen Hindernisse, da ihr weicher und nachgiebiger Körper genau das richtige Maß an Schutz für den Organismus bietet. Zudem verhindert ein weicher Körper Schäden an der Umgebung.
Das bioinspirierte Konzept des neuen SAUV, das Fabian Plum im Rahmen seiner Abschlußarbeit im Studiengang Bionik entwickelt hat, ist ein multifunktionales, 3D-gedrucktes, flexibles Exoskelett, das wie ein Stoßdämpfer wirkt. Dadurch kann das SAUV gefahrlos in der Nähe von Tauchern und empfindlichen Umgebungen arbeiten. Als Steuerungsalgorithmus wirkt ein neuronales Netz, das dem Benutzer hilft, das Fahrzeug auch in schwierigen und schwer vorhersehbaren Umgebungen leicht zu steuern.
Mit der verbesserten Sicherheit kann das neue SAUV-System für viele verschiedene kommerziell interessante Anwendungen eingesetzt werden. Zudem können im unteren Teil des SAUV bis zu vier Kameras angebracht werden. Über weiterführende Aktivitäten zur praktischen oder kommerziellen Umsetzung des SAUV ließ sich bislang nichts finden.
Im Zuge der Recherche zeigte sich, daß das autonome Unterwasserfahrzeug bereits mit dem HSB Airport City Innovation Award 2018 und dem Bremer 3D-Ideen (Bre3D) Award 2019 ausgezeichnet wurde - und daß das B-I-C schon seit einigen Jahren an der bioinspirierten strömungsgünstigen Optimierung von ROV-Hüllen arbeitet. Als technische Ausgangsbasis wurde das mit drei Thrustern ausgestattete OpenROV verwendet, das in der Jahresübersicht 2012 ausführlich beschrieben wurde.
Später wird nach dem Vorbild von Schildkröten ein TurtleROV entwickelt sowie mit dem ebenfalls oben beschriebenen ROV Sibiu Nano gearbeitet, für das verschiedene Hüllenvarianten konstruiert und ihr strömungsmechanisches Verhalten untersucht werden.
Im Juli 2020 erscheint das norwegische ROV-Unternehmen Kystdesign in den internationalen Blogs, als die Firma ein gewaltiges, dreieckiges Gerät namens StealthCleaner vorstellt, das die Netze von Fischfarmen säubert. In den letzten Jahren haben diese zunehmend damit begonnen, Unterwasser-ROVs für die Reinigung der Netze einzusetzen, die ihre Fischgehege umschließen.

Der StealthCleaner ist über ein Strom-/Kommunikationskabel mit einem an der Oberfläche befindlichen Hilfsschiff oder einer Kontrollstation an Land verbunden. Mit Echtzeitbildern von vier Bordkameras, die von LED-Scheinwerfern unterstützt werden, steuert der Bediener das ROV zunächst aus der Ferne durch das Wasser hinüber zum Gehege und dann in mehreren Durchgängen entlang des Netzes hin und her. Mit seinen sieben Schubdüsen kann sich der StealthCleaner außerdem in jede Richtung entlang des Netzes bewegen und bietet eine 360°-Manövrierfähigkeit.
Der ROV pumpt Wasser durch die Düsen von sieben rotierenden Waschscheiben an seiner Unterseite, um angesammelte Algen und andere Meeresorganismen vom Netzmaterial abzusprengen. Die Verwendung eines großen Wasservolumens, das mit relativ geringem Druck gepumpt wird, soll den Verschleiß der Netze im Vergleich zu anderen Reinigungsmethoden verringern. Zudem erlaubt die dreieckige Form, mit den Waschscheiben in Ecken und Winkel vorzudringen, die für andere ROVs unzugänglich sind.
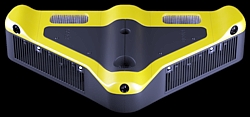
Daneben bietet das Unternehmen einen leistungsstarken ROV namens Constructor für komplexe Bau-, Wartungs- und Inspektionsaufgaben bis zu 3.000 m Wassertiefe an - sowie die ZEEROV-Serie (Zero-Emission Electric ROVs) zum gemeinsamen Einsatz mit autonomen Oberflächendrohnen.
Die bereits 1997 von Pål G. Eide in Haugesund gegründete Firma gilt als Spezialanbieter für professionelle Arbeits-ROVs mit Schwerpunkt auf industriellen und maritimen Anwendungen. Im März 2025 wird Kystdesign Teil der US-amerikanischen Chouest Group (Edison Chouest Offshore) und erscheint nun als 2018 gegründete Ocein AS (Ocein Innovation) mit einem StealthCleaner II, der schneller, mit integrierter KI intelligenter und für härtere Bedingungen gebaut ist.
Darüber hinaus gibt es das speziell für die Inspektion von Verankerungen und andere Aufgaben im Bereich der Aquakultur bis zu einer Tiefe von 1.000 m entwickelte Ocein ROV.
Eine völlig andere Art Unterwasserdrohne ist der Entwurf Saver Whale, den der Designer Do-hwi Lim aus Seoul im Oktober 2020 vorstellt. Das von Walen inspirierte Gerät soll Rettungsaktionen durchführen, die für Menschen schwierig oder gar unmöglich sind, wie auf den Meeresgrund zu tauchen und nach Opfern von Meeresunfällen zu suchen. Als aquatische Notfallösung soll es z.B. die Bemühungen von Ersthelfern bei einem sinkenden Schiff unterstützen.
(Grafik)
Der 87,6 cm lange, 39 cm breite und 23,8 cm hohe Unterwasser-Rettungsroboter soll daher in unbekannte Gewässer vordringen und als Späher medizinische Versorgung und Ausrüstung liefern. Hierzu trägt er einen 45 cm langen, 30 cm breiten und 15 cm hohen Erste-Hilfe-Kasten mit sich, in welchem sich eine Rettungsweste, ein Seil und andere Hilfsmittel befinden.
Der vielseitige Saver Whale, der mit Kameras, Sonar und Radar zur Erkennung und einem Funksystem zur Kommunikation ausgestattet ist, kann vom Hubschrauber aus eingesetzt werden. Entdeckt er Überlebende, kann er deren Standort übermitteln und das Rettungsteam um Unterstützung bitten. Darüber hinaus ist der Rettungsroboter in der Lage, ein Netz auf eine geortete Leiche zu werfen, um deren Position zu fixieren, damit sie nicht in der Wasserströmung verloren geht. Einen funktionsfähigen Prototyp gibt es bislang allerdings nicht.
Ein weiterer Unterwasserroboter,
der in Aquakulturen autonom Fische und Gehege inspiziert,
trägt den Namen CageReporter und
wird erstmals im Dezember 2020 in den Fachblogs präsentiert.
Das ROV ist das Ergebnis des genau ein Jahr zuvor abgeschlossenen Entwicklungsprojekts
des norwegischen Forschungsinstituts SINTEF Ocean AS und
der Technisch-Naturwissenschaftlichen Universität Norwegens (NTNU)
um die Forscherin Eleni Kelasidi, das im Januar 2017 mit
einem Budget von ungefähr 1,54 Mio. € gestartet und zu 50 % durch den
Norwegischen Forschungsrat finanziert worden war. Weitere Partner waren
die Fachhochschule
Westschweiz (HES-SO Valais-Wallis) sowie die Firmen Sealab
AS und Norsk Havservice AS.

(Grafik)
Um Probleme wie das Entkommen nicht einheimischer Fische und das Übertragen von Viren oder bakteriellen Infektionen der Zuchtfische auf ihre wilden Artgenossen in Schach zu halten, setzen viele Betriebe Taucher ein, was zeit- und energieaufwendig ist und für die Fische sehr stressig sein kann. Hier setzt das Projekt mit dem Titel ,Development of technology for autonomous, bio-interactive and high quality data acquisition from aquaculture net cages’ an.
Der CageReporter ist so konzipiert, daß er sich selbständig in den Fischgehegen bewegt und mit Hilfe eines Unterwasser-Positionsbestimmungssystems verfolgt, wo er sich befindet. Außerdem ist er mit einem 3D-Computersichtsystem ausgestattet, mit dem er den Zustand des Netzes und der Fische überprüfen kann. Der Roboter nutzt überdies auf künstlicher Intelligenz basierende Algorithmen, um das Verhalten der Fische zu beobachten und seine Bewegungen so anzupassen, daß er sie so wenig wie möglich stört.
Während seiner Tour und Inspektion mißt der CageReporter mit Hilfe von Sensoren zudem die Wassertemperatur, den Sauerstoffgehalt und die Lichtverhältnisse. Stellt er Probleme mit dem Netz, den Fischen oder der Wasserqualität fest, übermittelt er seinen Standort über ein ultraschallbasiertes Signalsystem für den Unterwassereinsatz, das von dem norwegischen Start-Up Water Linked AS entwickelt wurde, an eine Basisstation an der Oberfläche.
In zwei Fischfarmen außerhalb von Frøya an der Küste von Trondheim, die von SalMar betrieben werden, aber auch als Feldlabor für SINTEF-Forscher dienen, wird ein Prototyp erfolgreich getestet. Dabei liefert der Roboter sowohl laserscharfe Fotos des Käfigs in Echtzeit als auch präzise Positionsdaten. Mit seiner Technologie kann der CageReporter Verformungen im Netz entdecken und melden und sogar zukünftige Schäden vorhersehen.
Ebenfalls im Dezember 2020 erscheint in den Blogs das ROV SRV-8 des 2017 von Robert Jechart gegründeten südkalifornischen Unternehmens Oceanbotics, das für Anwendungen wie die Aufklärung, die Inspektion von Unterwasserstrukturen und die Suche und Bergung von Objekten auf dem Meeresboden konzipiert ist. Der erste ROV war im Mai 2019 an einen Kunden ausgeliefert worden.

Das 50 cm breite und 43 cm hohe SRV-8 hat eine maximale Tauchtiefe von gut 300 m, kann bis zu sechs Stunden mit einer Ladung seiner zwei austauschbaren Batteriemodule betrieben werden, ist dank acht Schubdüsen um 360° manövrierfähig und kann mit seiner Stationierungsfunktion auf einem bestimmten Kurs, einer bestimmten Tiefe oder einem bestimmten Neigungswinkel fixiert werden. Zu den weiteren Merkmalen des 18 kg (andere Quellen: 25 kg) schweren ROV gehören ein Roboter-Greifarm mit drei Kiefergelenken, der Lasten von bis zu 5 kg heben kann, Rahmenschienen zur Befestigung externer Geräte sowie optionale Sonar- und Navigationssysteme.
Unterstützt von zwei LED-Scheinwerfern zeichnet die Kamera des ROV digitale Videos auf und überträgt analoge Videos über eine elektrische Leine an den Bediener an Land oder auf dem Boot. Je nachdem, wie das SRV-8 konfiguriert ist, liegt der Preis zwischen etwa 30.000 und 40.000 $.
Im März 2023 bringt Oceanbotics den größeren SRV-8X Optimus auf den Markt und im August wird der Geschäftsbereich Spezialfahrzeuge gegründet, zu dessen Produkten das Minenräumfahrzeug SRV-8 MDV (Mine Disposal Vehicle) und das akustische Ortungssystem SRV-8X ATS (Acoustic Tracking System) gehören. Im Oktober meldet die Firma, daß nun bereits 200 Exemplare ihrer Unterwasserdrohnen auf sechs Kontinenten im Einsatz sind.
Als im Oktober 2024 in der Sendung 60 Minutes Australia über Oceanbotics berichtet wird, ist zu erfahren, daß die australische Grenzpolizei das SRV-8 erfolgreich eingesetzt hat, um einen 80 Mio. $ schweren Kokainschmuggel aufzudecken und zu verhindern. Das ROV hatte einen verdächtigen Anhang an einem Schiff inspiziert, wobei bei diesem ,Parasitenschmuggel’ etwa 200 kg Kokain entdeckt und beschlagnahmt wurden.
Ein drittes ROV, das im Dezember 2020 vorgestellt wird, ist ebenfalls definitiv für den professionellen Einsatz gedacht - was alleine schon durch seinen Preis von 56.999 $ klar wird. Das Revolution NAV des kanadischen Unternehmens Deep Trekker ähnelt in vielerlei Hinsicht anderen ROVs: Es ist über ein Kommunikationsseil mit einem Bediener an der Oberseite verbunden, verfügt über zwei vertikale und vier horizontale Schubdüsen, kann bis zu 300 m tief hinabsteigen, nimmt Videos auf, hat einen Greifarm und kann mit einer Ladung seines austauschbaren Lithium-Ionen-Akkus bis zu acht Stunden lang operieren.

Das neue Revolution NAV hat jedoch eine Besonderheit, um das Problem zu meistern, daß GPS unter Wasser nicht funktioniert, wodurch es schwierig ist, den Aufenthaltsort eines Tauchfahrzeugs zu verfolgen. Dies geschieht, indem der Bediener ein Objekt in der Größe einer Getränkedose ins Wasser fallen läßt, wenn das ROV vom Ufer oder von einem Boot aus gestartet wird. Dieser Transducer schwimmt an der Oberfläche über dem ROV und sendet akustische Impulse ins Wasser. Jedes Mal, wenn ein oben auf dem ROV montierter Transponder einen dieser Impulse empfängt, sendet er einen eigenen Impuls aus.
Wenn der schwimmende Wandler diesen Antwortimpuls erkennt, kann er feststellen, wie weit das ROV entfernt ist und in welche Richtung es sich bewegt. Da ein GPS-Modul im Handsteuergerät des Bedieners die Koordinaten dieses Geräts bereits kennt, kann ein integrierter Mikroprozessor auch die Koordinaten des ROVs berechnen.

Deep Trekker
Diese Technologie ist nicht einzigartig für Deep Trekker, doch das Unternehmen geht noch einen Schritt weiter und nutzt die Daten, um den aktuellen Standort des Revolution NAV auf einer Google Maps-Einblendung auf dem Bildschirm der Steuerung anzuzeigen. Die Route, der das ROV gefolgt ist, wird ebenfalls angezeigt und kann für spätere Referenzzwecke gespeichert werden, ebenso wie die Position interessanter Objekte, die auf dem Live-Feed der ROV-Kamera entdeckt werden, für spätere Untersuchungen markiert werden kann.
Das Fahrzeug besitzt außerdem einen kugelförmigen Kopf, der relativ zum Körper um 260° nach oben und unten geneigt werden kann, so daß die Kamera, die Beleuchtung, der Arm oder andere optionale Zusatzgeräte bewegt werden können, um den optimalen Winkel für die jeweilige Aufgabe zu finden, während das ROV seine Position in der Wassersäule hält. Eine günstigere Version ohne GPS-Tracking kostet übrigens 29.999 $.
Im Februar 2024 bringt Deep Trekker ein viel kleineres, preisgünstigeres und dennoch sehr leistungsfähiges Modell namens Photon auf den Markt, das nur 48,2 cm in der Länge, 33,3 cm in der Breite und 22,8 cm in der Höhe mißt und in erster Linie für Aufgaben wie Unterwasservermessung und -inspektion entwickelt wurde. Es ist so kompakt, daß es zusammen mit einem austauschbaren Lithium-Akku, einem wasserdichten Joystick-Controller und einem 150 m langen Kabel in einen einzigen Pelican-Koffer paßt.

Das ROV besteht aus eloxiertem Aluminium, rostfreiem Stahl, Kohlefaser und Auftriebsschaum und wiegt außerhalb des Wassers 11,6 kg. Es kann bis zu einer maximalen Tiefe von 120 m abtauchen und nutzt sechs Triebwerke, um sich unter Wasser zu bewegen, wobei seine Höchstgeschwindigkeit etwa 2,5 Knoten beträgt. Eine Akkuladung soll für bis zu zwei Stunden Betrieb ausreichen.
Das Video wird von einer integrierten, ferngesteuerten und schwenkbaren 4K-Kamera aufgenommen, die von LED-Scheinwerfern und einer Software zur Bildentfernung, Verbesserung der Klarheit und Farbkorrektur unter Wasser unterstützt wird, wobei der Bediener das Video in Echtzeit auf dem 7-Zoll-Bildschirm der Fernbedienung sieht.
Das Basispaket wird für 12.000 $ angeboten. Käufer, die bereit sind, etwas mehr zu zahlen, können sich für ein Nav-Paket entscheiden, das einen Werkzeugschlitten, einen Roboter-Greifarm, ein 300 m langes Halteseil und ein verbessertes Positionierungssystem umfaßt. Weitere ROVs der Firma heißen übrigens DTG3 und Pivot.
Im
Mai 2021 erscheint ein ROV in den Blogs, das kein
Kommunikationskabel mehr benötigt, welches es mit der Oberfläche verbindet.
Das ExRay (o. EXRAY) der 2014 gegründeten
Schweizer Firma Hydromea - einer Ausgründung der EPFL
Lausanne - wird daher als „die erste kabellose Unterwasserdrohne
der Welt“ bezeichnet, was allerdings nicht ganz stimmt, wie
die bisherige Übersicht zeigt.
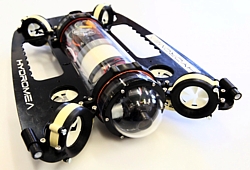
Nichtsdestotrotz umgeht das tragbare Gerät das Problem, daß sich Funkwellen im Wasser nicht gut ausbreiten, indem es das LUMA genannte, patentierte Unterwasserkommunikationssystem des Unternehmens nutzt, welches binäre Daten über schnelle Lichtimpulse durch das Wasser überträgt.
Dabei sendet Luma Lichtimpulse von blauen 470 nm LEDs zwischen zwei optischen Modems hin und her, einem auf dem ROV und einem an der Oberfläche. Die Daten werden mit einer Geschwindigkeit von 10 MBit/s übertragen, wodurch sich selbst HD-Videos von der ExRay-Bordkamera praktisch ohne Verzögerung verfolgen lassen.
Allerdings gibt es die Einschränkungen, daß das ROV derzeit nur eine Kommunikationsreichweite von 50 m bei klarem Wasser und völliger Dunkelheit hat - diese Zahl nimmt ab, wenn das Umgebungslicht und der Trübungsgrad zunehmen. Das Unternehmen strebt jedoch eine Reichweite von mindestens 100 m an, um das Gerät bis in die entsprechende Wassertiefe einzusetzen.

(neue Version)
Der aktuelle Prototyp des ExRay ist 70 cm lang, wiegt 7 kg und verfügt neben der zoomfähigen HD-Kamera und zwei LED-Scheinwerfern über vier vertikale und drei horizontale Schubdüsen. Die Akkulaufzeit beträgt 6 - 8 Stunden. Genauere Spezifikationen und Preise sollten dann bei der Markteinführung Ende 2022 bekannt gegeben werden. Tatsächlich wird das Produkt aber erst auf der Oceanology International 2024 offiziell eingeführt.
Neben einem neuen Design wird das System nun als ,Dopelpack’ angeboten, indem ein mit einem Kabel verbundenes ExRay durch ein Flyout genanntes, gleichartiges Gerät erweitert wird, das wie ein normales ROV funktioniert, aber die LUMA-Technologie nutzt, um in einer Entfernung von bis zu 30 m von dem angebundenen ROV zu arbeiten, das damit zum Kommunikationsrelais wird.
Wissenschaftler der Jade Hochschule (Jade HS) in Oldenburg berichten Ende Juni 2021 über den Abschluß des Forschungsprojekts EITAMS (Entwicklung innovativer Technologien für autonome maritime Systeme), bei dem ein Demonstrator realisiert wurde, der aus einem autonom operierenden Überwasserfahrzeug besteht, welches einen Schwarm selbständig fahrender und kooperierender Unterwasserfahrzeuge steuert.
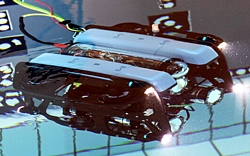
Dabei wurden eigene intelligente Algorithmen zur Missionssteuerung sowie neuartige Meßtechniken erprobt. Das Forschungsprojekt, das im Januar 2017 startete, wurde von der Niedersächsischen Volkswagen Stiftung mit insgesamt 1,5 Mio. € gefördert.
Unter der Gesamtleitung von Prof. Klaus-Jürgen Windeck sind bei EITAMS intelligente Steuersoftware für Über- und Unterwasserfahrzeuge, intelligente Suchstrategien für kooperierende Unterwasserfahrzeuge, ein photogrammetrisches Kamerasystem zur dreidimensionalen Erfassung von Objekten unter Wasser sowie ein Datenmanagementsystem entwickelt worden. Bei dem eingesetzten Unterwasserfahrzeug handelt es sich möglicherweise um eine Eigenentwicklung der Jade HS, genauere Details darüber ließen sich nicht finden.
Im Juli 2021 stellen die Blogs mit Teleportal.Fish (später: teleportal.net) eine Möglichkeit vor, die es jedem Computerbesitzer ermöglicht, das Great Barrier Reef in Australien über eine Live-Verbindung mit einem ferngesteuerten Unterwasserroboter virtuell zu besuchen. Das von dem australischen Dokumentarfilmer Adam Cropp entwickelte System nutzt zwei Osibot Heavy ROVs, die zukünftig zu einer ganzen Flotte erweitert werden sollen.
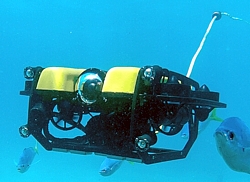
Teleportal.Fish
Beide ROVs sind an eine Basisstation angebunden, die 30 km vor der Küste von Arlington Reef in Far North Queensland verankert ist. Diese Station lädt die Batterien der Fahrzeuge über Solarzellen auf und hält die ROVs über 4G mit dem Internet verbunden. Über das Online-Portal können Benutzer von jedem Ort der Welt aus die Kontrolle über einen der Bots übernehmen und die Live-Videos seiner Weitwinkelkamera auf dem Computerbildschirm sehen. Sie steuern den ROV mit denselben Tasten, die auch in Spielen verwendet werden, und können ihn von seiner Basis aus bis zu 100 m, der maximalen Länge der Leine, in jede Richtung bewegen.
Neben der HD-Kamera sind die ROVs auch mit LED-Scheinwerfern für den Einsatz bei Nacht ausgestattet, sowie mit einem sonarbasierten Hindernisvermeidungssystem, damit sie die Korallen nicht beschädigen. Sie erreichen eine Höchstgeschwindigkeit von 3 Knoten und reagieren mit einer Latenzzeit von weniger als 200 Millisekunden auf die Befehle der Bediener.
Diese müssen ein Konto eröffnen und im Voraus Guthaben kaufen, das auf ihre Tauchgänge angerechnet wird, wobei ein einstündiger Tauchgang 22 - 37 $ kostet. Das Portal bietet auch einen günstigeren animierten Simulator, mit dem die Steuerung eines ROVs ausprobiert werden kann, bevor man sich mit den echten Geräten im Ozean versucht.
Nicht ganz klar ist die Benennung der ROVs, die auf das im März 2020 gegründete schottische Unternehmen Osibot mit Sitz in Glasgow als Hersteller verweist. Tatsächlich ist auf den Fotos jedoch stets das Modell BlueROV2 der o.g. kalifornischen Firma Blue Robotics Inc. zu sehen - das von der Form her aber absolut identisch mit dem Osibot Heavy ROV ist.
Eine direkte Firmenverbindung oder Kooperation ließ sich bislang nicht nachweisen, allerdings erscheint Adam Cropp als Gründer einer australischen namens Firma Osibot, die bereits 2019 mit der Osibot 1 – Mary ein 5 m langes, solarbetriebenes, autonomes Oberflächenboot entwickelt hat, das bis März 2022 eine Strecke von über 30.000 km selbständig zurücklegt. Über derartige Projekte wird in einer späteren Übersicht noch ausführlich berichtet.
Auch das im Jahr 2001 von Jorgen Pedersen gegründete, in Pittsburgh ansässige Unternehmen RE2 Robotics hat ein Robotersystem zur Neutralisierung von Unterwasserminen bzw. Sprengsätzen entwickelt, ähnlich dem o.e. ROV Sea Wasp von Saab, um diese gefährliche Aufgabe nicht Tauchern überlassen zu müssen. Wie im September 2021 bekannt wird, soll das Unternehmen im Rahmen eines kürzlich vom US Office of Naval Research (ONR) vergebenen 9,5 Mio. $ Vertrags nun als Systemintegrator für das autonome robotergestützte Maritime Mine Neutralization System (M2NS) fungieren, das speziell für die US Navy entwickelt wird.
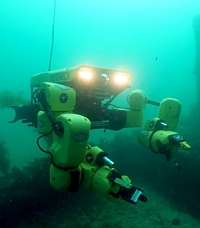
Roboterarmen
Dieses System wird aus einer Reihe der Sapien Sea Class Roboterarme von RE2 bestehen, die auf einem Defender ROV des in Pennsylvania beheimateten Unternehmens VideoRay montiert sind. M2NS wird neben einer Reihe von Sensoren auch die Computer-Vision-Software Detect von RE2 zum Aufspüren von Minen sowie die autonome Software Intellect zum Plazieren von ,Neutralisierungsvorrichtungen’ auf den Minen enthalten.
Die ursprünglich für das ONR entwickelten Arme der Sapien Sea Class bieten jeweils sechs Freiheitsgrade, können in einer Tiefe von bis zu 300 m operieren und sind jeweils in der Lage, unter Wasser bis zu 5,2 kg zu heben. Man hofft, daß M2NS, sobald es betriebsbereit ist, auch für Aufgaben wie die Inspektion und Wartung von Offshore-Ölplattformen und anderen maritimen Strukturen eingesetzt werden kann.
Was den Defender ROV anbelangt, so besitzt dieser ein bis zu 300 m langes Verbindungskabel, kann aber bis zu 1.000 m tief tauchen. Bei einer Größe von ca. 75 x 39 x 26 cm beträgt sein Gewicht unter Wasser etwa 17 kg. Dank acht Freiheitsgraden bei der Steuerung kann der ROV auch komplexe Manöver mit hoher Präzision durchführen und sein modulares Design erlaubt den Einsatz vielfältiger Sensoren und Nutzlasten. Der Preis mit einer 100 m Kabelspule wird mit 126.978 $ angegeben.
Die herstellende Firma VideoRay wurde 1999 gegründet und bietet eine breite Palette von ROVs, darunter eine schlankere, kompakte ROV-Plattform für vielseitige Anwendungen mit hoher Manövrierfähigkeit namens Pro 4, sowie eine neuere Generation von ROVs mit extremer Wendigkeit und sechs Freiheitsgraden, die unter dem Namen Wraith vermarktet wird. Zusätzlich bietet VideoRay umfangreiche Sensor- und Zubehörpakete an.
Im Frühjahr 2022 wird RE2 Robotics von der Sarcos Technology and Robotics Corp. für etwa 100 Mio. $ übernommen, wobei RE2 seine Identität und seinen Standort in Pittsburgh beibehält - während die VideoRay im Jahr 2024 zu einem ungenannten Preis von der im Bereich Verteidigungstechnologie aktiven Firma BlueHalo übernommen wird.
Im Januar 2022 bringt das französische Unternehmen für Meerestechnologie Notilo Plus einen Hightech-Unterwasserroboter auf den Markt, der in der Lage ist, Taucher unter Wasser autonom zu verfolgen und mit Hilfe einer Kombination aus Computer-Vision-Technologien und akustischen Sensoren hochauflösende Videos von ihnen aufzunehmen - was allerdings auch schon die o.e. Unterwasserdrohne iBubble kann.

Der neue Seasam gilt hingegen als ein leistungsfähiges Modell, das für eine Reihe von industriellen und technischen Tauchanwendungen gedacht ist. Er überwacht akustische Signale, die von einem Signalgeber, den der Taucher bei sich trägt, aus einer Entfernung von bis zu mehreren Dutzend Metern ausgestrahlt werden, und nutzt diese, um den Taucher auch bei Dunkelheit oder bei schlechten Sichtverhältnissen unter Wasser zu verfolgen. Die Steuereinheit wird auch verwendet, um akustische Signalbefehle an den Seasam zu senden.
Obwohl der Benutzer die Drohne nicht wirklich steuern kann, kann er ihren Verfolgungsabstand/-winkel einstellen, ihre Scheinwerfer einschalten und die Aufnahme starten oder stoppen. Außerdem kann er sie so einstellen, daß sie sich vor ihm bewegt, daß sie ihn umkreist, während er anhält, daß sie von selbst auftaucht oder daß sie direkt auf ihn zukommt, so daß er sie greifen und manuell auf das richten kann, was er filmen möchte. Außerdem vermeidet die Drohne Kollisionen mit Hindernissen auf dem Weg, indem sie ein Sonarsystem nutzt.
Besonders interessant ist, daß der Seasam sowohl als ROV über ein Kommunikationskabel von der Oberfläche aus ferngesteuert werden kann - als auch durch Verwendung eines motorisierten Miniatur-Überwasserschiffs, dem Navigator. Dieser ist über ein kürzeres Kabel mit der Drohne verbunden und kommuniziert drahtlos über Wi-Fi mit dem Bediener. Zudem kann er die Position der Unterwasserdrohne im Verhältnis zu sich selbst bestimmen und die GPS-Koordinaten für alles liefern, was diese entdeckt.
Wie sich herausstellt, kam der Seasam bereits 2019 auf den Markt, zu einem Preis ab 12.000 €, erregt jedoch erst Aufmerksamkeit, als er in dem Horrorfilm The Deep House von 2021 zu sehen ist, in dem ein tauchendes Paar ein Unterwasser-Spukhaus erkundet. Eine Spezialversion der Drohne ist das Modell Seasam HullScan, das für die Inspektion von Schiffsrümpfen gedacht ist.
Im Februar 2022 berichtet ein Team der chinesischen Zhejiang University um Prof. Jing Xu in der Studie ,Series-connected solar array for high-speed underwater wireless optical links’ über eine neue Form der Unterwasserkommunikation, die auf Lichtbasis funktioniert. Zwar haben schon verschiedene Gruppen Laserlichtpulse zur Datenübertragung unter Wasser verwendet, doch die Funktionalität solcher Systeme ist begrenzt, da der Sender, der das Licht aussendet, genau auf die Fotodiode ausgerichtet werden muß, die es empfängt. Aufgrund dieser Einschränkung müssen die beiden Einheiten recht nahe beieinander liegen.

Solarzellen hingegen sind so konzipiert, daß sie das einfallende Streulicht aus einem großen Bereich auffangen. Allerdings sind sie viel besser darin, dieses Licht in einen Stromkreis zu leiten, als es in ein Datensignal umzuwandeln. Bislang waren für Hochgeschwindigkeitsverbindungen mit handelsüblichen Silizium-Solarzellen daher komplexe Modulationen und Algorithmen erforderlich, die intensive Rechenressourcen erfordern, zusätzliche Energie verbrauchen und eine hohe Verarbeitungslatenz verursachen.
Das Team behebt dieses Manko, indem mit Hilfe der Computermodellierung und Simulation der angeschlossenen Solarzellen die Peripherieschaltung optimiert wird, was die Leistung des solarzellenbasierten Detektors erheblich verbessert. Der daraus resultierende Aufbau umfaßt ein Array aus 3 x 3 miteinander verbundenen Solarzellen, wodurch ein 3,4 x 3,4 cm großer Erfassungsbereich entsteht.
Diese Anordnung wird an einem Ende eines 7 m langen Wassertanks angebracht, an dessen anderem Ende sich eine Laserdiode befindet. Durch eine Reihe von Spiegeln innerhalb des Tanks muß das Laserlicht jedoch insgesamt 35 m zurücklegen, um von der Diode zu dem Solarzellenarray zu gelangen. Bei den Tests zeigt das System eine zuverlässige Stabilität, einen geringen Stromverbrauch und eine viel höhere Erfassungsbandbreite als in früheren Studien, die ebenfalls Solarzellen verwendet haben.
Tatsächlich gelingt es, eine -20-dB-Bandbreite von 63,4 MHz zu erreichen, was eine drahtlose optische Unterwasserverbindung mit 150 Mbit/s über die Strecke von von 35 m ermöglicht. Das Team will nun untersuchen, wie effektiv der Aufbau bei der Erkennung schwacher optischer Signale ist, ähnlich denen, mit denen er in schlammigem oder anderweitig trübem Wasser arbeiten müßte.
Auch der kriminelle Einsatz von unbemannten, ferngesteuerten
oder teils autonomen Unterwasserdrohnen nimmt zu. Solche Narco-Drohnen (o.
Narco-Subs) werden schon länger für den illegalen Schmuggel über Ozeane
eingesetzt. Bemannte Versionen mit Diesel- oder dieselelektrischen
Antrieben lassen sich bis in die 1990er Jahre zurückverfolgen
- ich verweise dazu auf den entsprechenden ausführlichen Wikipedia-Artikel.
Nicht erklärlich ist hingegen, warum die Republik Niger im Jahr 2022 solcherart
Drohnen auf einem Briefmarkenblock verewigt.

aus Nigeria
Ein Beispiel: Bereits im März 2021 konnte die kolumbianische Marine im Pazifik ein Drogen-U-Boot auf dem Weg zur mexikanischen Küste abfangen, das mehrere Pakete Kokain transportierte. Dabei scheint es sich allerdings um ein Halbtauchboot gehandelt zu haben - um Radarsystemen zu entgehen -, während zum Antrieb vermutlich Dieselmotoren zum Einsatz kamen.
Im Juli 2022 gelingt es den spanischen Behörden erstmals, drei U-Boot-Drohnen zu beschlagnahmen, die speziell konzipiert waren, um jeweils rund 200 kg Drogen zu transportieren. Die von Marokko aus gestarteten unbemannten Boote sind jeweils mit zwölf Elektromotoren ausgestattet und haben eine Reichweite von etwa 30 km, was ihnen erlaubt, die etwa 15 km breite Straße von Gibraltar sicher zu überqueren. Detailliertere Spezifikationen zum Aufbau und zu den eingesetzten Batterien sind aufgrund der polizeilichen Geheimhaltung nicht verfügbar.
Es wirft allerdings Fragen auf, warum in diesem Zusammenhang gemeldet wird, daß die Beamten insgesamt (nur) 14 kg Haschisch, 8 kg Marihuana und gut 157.000 € in bar sowie sechs große Flugdrohnen beschlagnahmt hätten, während in Cádiz, Málaga und Barcelona acht Personen festgenommen wurden. Diese genannten Cannabismengen werden in Berlin in wenigen Stunden und ganz legal verraucht, können also kaum die kriminelle Energie erklären, die hinter dem Bau und dem Einsatz der Schmuggel-U-Boote steckt.
Im Jahre 2023 werden von den kolumbianischen Behörden insgesamt zehn Narco-U-Boote abgefangen, doch im Juli 2025 gelingt der Marine auch die erste Beschlagnahmung eines unbemannten, ferngesteuerten Drogen-Torpedos, das mit einem Starlink-Satelliten-Internetanschluß ausgestattet ist und weltweit ferngesteuert werden kann - und damit einen technologischen Durchbruch darstellt.
Mit Sprengstoff beladene Unterwasserdrohnen kommen
in Verbindung mit den Nord-Stream-Anschlägen in die Presse, die sich
Ende September 2022 ereignen, als es innerhalb weniger
Stunden zu mehreren Explosionen an den Pipelines Nord Stream
1 und Nord Stream 2 auf dem Grund der Ostsee
kommt. Als Verursacher wird sofort Russland verdächtigt, doch die Untersuchungen
zu tatsächlichen Tätern und Hintermännern dauern noch immer an.

Was dabei - möglicherweise bewußt - verschwiegen wird, ist, daß schwedische Techniker schon im Oktober 2015 bei einer Routineuntersuchung der Nord Stream 2 eine mit Sprengstoff beladene Unterwasserdrohne gefunden hatten, was damals als Hinweis auf mögliche Sabotageakte gewertet wurde und den potentiellen Täterkreis aus heutiger Sicht beträchtlich erweitert. Schweden stuft die entsprechenden Ermittlungsergebnisse jedoch als hochgradig geheim ein und teilt sie nicht frei mit anderen Staaten.
Im Zuge der Recherche stellt sich aber heraus, daß es sich bei der gefundenen Drohne um ein kompaktes Modell namens Sea Fox (o. Seefuchs) handelt, eine militärische Unterwasserdrohne, die von der deutschen Firma Atlas Elektronik (später: TKMS ATLAS ELEKTRONIK) hergestellt wird und weltweit von mehr als zehn Marinen eingesetzt wird, darunter auch der US Navy.

(2015)
Der Antrieb der 40 kg schweren und 1,3 m langen Drohne erfolgt über vier Propeller, sie besitzt einen Greifarm, ist mit 1,4 kg TNT ausgestattet und kann bis 300 m tief tauchen. Gesteuert wird das torpedoförmige ROV, das eigentlich dem Aufspüren und Sprengen von Seeminen dient, mittels Lichtwellenkabel.
Es erwies sich, daß die US Navy das gefundene Exemplar im Einsatz hatte und später als ,verloren’ meldete – genau an der Stelle, an der sie dann von den schwedischen Ermittlern entdeckt wurde. Dem widerspricht jedoch, daß die Drohne gezielt nahe der Pipeline plaziert war, was auf einen geplanten Sabotageversuch hindeutet. Den schwedischen Streitkräften zufolge konnte die nationale Identität der Drohne bisher aber nicht aufgedeckt werden, da das UUV-Modell „von vielen Ländern eingesetzt wird“ - als ob es keine Seriennummern oder sonstigen Herstellerhinweise gibt, die auf die jeweilige Liefercharge verweisen.
Nachtrag: Im Januar 2026 entscheidet der Bundesgerichtshof, daß der mutmaßliche Saboteur der Nord-Stream-Pipelines Serhii K., ein früherer Mitarbeiter des ukrainischen Geheimdienstes SBU, der im August 2025 in Italien auf EU-Haftbefehl festgenommen und Ende November nach Deutschland ausgeliefert wurde, in Haft bleibt. Der Anschlag wird nun einem Team aus sieben Ukrainern zugeschrieben.
In der Chronologie der ROVs folgt als Nächstes der batteriebetriebene SeaSearcher, der von dem 2007 durch Kyle Kennedy gegründeten Unternehmen Seafarer Exploration Corp. (SFRX) in Florida entwickelt wird und im August 2022 erstmals in den Fachblogs erscheint, obwohl er seit spätestens 2019 in Arbeit ist.

Entworfen wurde der SeaSearcher, der sich derzeit als Prototyp in Betrieb befindet, von dem Ingenieur Tim Reynolds der Partnerfirma für Produktentwicklung und Engineering Wild Manta LLC.
Die wichtigste Funktion des rochenförmigen SeaSearcher besteht darin, daß er verschiedene Arten von Metallen, darunter auch Gold und Silber, die bis zu 10 m unter dem Meeresboden vergraben sind, aufspüren kann, woraufhin er eine digitale 3D-Karte ihrer Position erstellt und weiterleitet. Wie genau dies geschieht, ist jedoch ein Geschäftsgeheimnis.
Bekannt ist nur, daß die Drohne bis zu 100 m tief abtauchen und dann etwa 1 m über dem Meeresboden kreisen kann, wobei sie elektromagnetische, HF- und akustische Wellen mit unterschiedlichen Modulationsformaten aussendet. Mithilfe von auf maschinellem Lernen basierenden Echtzeit-Algorithmen analysiert es die Art und Weise, in der vergrabene Metallobjekte durch diese Wellen ,erregt’ werden. Als Ergebnis soll das Fahrzeug die Tiefe bestimmen können, in der sich die Objekte befinden, sowie die Art des Metalls, aus dem sie bestehen.
(Grafik)
Die geographische Lage der gefundenen Metalle wird auf zwei Arten bestimmt. So schleppt der SeaSearcher zunächst eine schwimmende Boje über sich an der Oberfläche entlang. Die GPS-Koordinaten dieser Boje werden aufgezeichnet und an die Besatzung des Begleitbootes übermittelt. Darüber hinaus wird ein von der US Navy entwickeltes Triangulationssystem verwendet, das aus einer untergetauchten Plattform besteht, die über die Seite des Begleitboots gehängt wird und Sonarimpulse an die Drohne sendet und von ihr empfängt.
Der SeaSearcher kann als ROV, als AUV, das einem vorprogrammierten Suchmuster folgt, oder als Schleppfisch eingesetzt werden, der hinter einem Boot hergezogen wird. Erste Tests erfolgen im Februar 2020 und werden seitdem kontinuierlich weitergeführt. Bei einem an einem Wrack in Florida durchgeführten Feldtest findet der Prototyp zwar kein Gold oder Silber, identifiziert aber Gegenstände aus Messing, Eisen, Kupfer, Aluminium, Blei und rostfreiem Stahl.
Im Juli 2022 gibt die Seafarer Exploration den Bau der zweiten Generation der SeaSearcher-Plattform bekannt, die für die Erkundung in tieferen Gewässern gedacht ist. Das aktualisierte Design ist stromlinienförmiger, robuster und besser bei der Metallunterscheidung und 3D-Bildgebung. Ein weiteres Produkt der SFRX, das im März 2024 auf der 58. Jahrestagung der Society of California Archaeology vorgestellt wird, ist die autonome Unterwasser-Baggeranlage SeaVac3000, die sich bereits im Probebetrieb befindet.

Im Oktober 2022 folgt die nächste Crowdfunding-Kampagne auf Kickstarter. Diesmal geht es um ein 500 € teures Unterwassergefährt namens BentiX, das der Ingenieurstudent Nicolas Boraccino von der französischen Universität Lille entwickelt hat. Das kleine ROV ist 30 cm lang, 25 cm breit, 15 cm hoch und wiegt 5 kg.
Wie die meisten Unterwasserdrohnen ist die BentiX über ein Kabel mit einer oberflächennahen Joystick-Fernbedienung verbunden, wobei der Benutzer auf einem Display sieht, was die Drohne mit ihrer Kamera aufnimmt. Die kommerzielle BentiX-Version soll eine maximale Tauchtiefe von 100 m erreichen und sich mit bis zu 2 m/s vorwärtsbewegen. Als Energiequelle dient eine 30 Ah Lithium-Ionen-Batterie, die für einen bis zu dreistündigen Betrieb ausreicht.
Die Kampagne ist allerdings erfolglos, denn statt der erhofften 50.000 € beteiligen sich bis Dezember nur 23 Unterstützer mit insgesamt 1.426 €, was möglicherweise an dem kaum ausgereiften technischen Aufbau und dem sehr schlichten 3D-gedruckten Körper liegt.
Eine periphere Information in Verbindung mit Unterwasser-Aktivitäten
soll darauf hinweisen, daß in der Tiefe noch mehr geschieht, als
nur ROV-Exkursionen in der Freizeit, archäologische Suchkampagnen
oder militärische Operationen. Gemeint ist der Meeres- und
Tiefseebergbau, für den es noch keine globalen Umweltregeln
gibt. Das Thema ist so umfassend, daß es hier nur exemplarisch an
einem Beispiel behandelt werden kann.

So wird im Januar 2023 berichtet, daß das kanadische, im Jahr 2020 gegründete Unternehmen Impossible Metals Inc. einen autonomen Unterwasserroboter zum Ernten polymetallischer Knollen entwickelt hat, der den Meeresboden nicht beschädigt und damit einen nachhaltigen Abbau ermöglichen soll. Der rund 3 m lange Eureka I soll Manganknollen vom Meeresboden aufsammeln, die neben Mangan u.a. auch Lithium, Nickel und Kobalt enthalten, die z.B. für die Produktion von Elektroautobatterien benötigt werden.
Das Wesentliche ist, daß der Roboter dabei über dem Meeresboden schwebt und diesen nicht berührt. Zudem unterscheidet er über Kameras, Sensoren sowie mittels KI zwischen den polymetallischen Knollen und normalem Gestein und bestimmt, welche Knollen geeignet sind und aufgenommen werden sollen. Dabei berücksichtigt er auch, ob sich auf diesen etwa Lebewesen wie Weichtiere oder Schwämme befinden. Solche Knollen spart Eureka 1 aus, während die anderen mit einem Greifer aufgenommen und dann über einen Schlauch in eine Sammelkammer befördert werden, was man sich in einer Animation ansehen kann.
Die AUVs werden alle paar Stunden an die Oberfläche zurückkehren und entladen, dann werden die Batterien ausgetauscht, damit sie wieder abtauchen können.
In einem Test im Dezember des Vorjahres hatte das Unternehmen die Funktionsfähigkeit ihres AUV nachgewiesen, der derzeit allerdings nur als Proof of Concept vorliegt. Dabei tauchte der Roboter auf etwa 7,6 m und sammelte dort Knollen auf, ohne dabei den Meeresboden zu beschädigen. In Zukunft sollen ganze Flotten solcher AUVs die Manganknollenfelder in den Weltmeeren wie etwa dem Atlantik und Indischen Ozean in Tiefen von 3.000 - 7.000 m abernten.

Impossible Metals geht davon aus, ab 2026 technisch so weit zu sein, um ein funktionierendes AUV in Großserie produzieren zu können - wobei auf Fotos bereits ein Modell Eureka II zu sehen ist, das seinen Tiefseetest im April 2024 abgeschlossen hat. Eine Version Eureka III der selektiven Erntefahrzeuge soll dann im Jahr 2027 oder 2028 in der Clarion Clipperton Zone (CCZ) getestet werden, in der viele Manganknollen vorkommen.
Die Deep Sea Mining Campaign (DSMC), die sich seit 2011 konsequent auf die sehr reale Bedrohung der Weltmeere durch den Tiefseebergbau konzentriert, untersucht in einem Forschungspapier mit dem Titel ,Impossible Metals = Impossible Promises’ vom Juni 2025 die Behauptungen der Impossible Metals. Die kritische Analyse kommt zu dem Schluß, daß die vorgeschlagene Abbaumethode im Gegensatz zu den Behauptungen des Unternehmens weder nachhaltig noch selektiv ist. Das Unternehmen sei nicht in der Lage, eine wissenschaftliche Grundlage für seine Behauptungen vorzulegen.
Wer sich weiter mit diesem Thema befassen möchte, sei auf die im Netz einsehbare Studie ,A Techno-Economic Assessment of Seabed Mining’ von Michael Barnard und Lyle Trytten hingewiesen, die im August 2025 erscheint. Die Studie wurde von der National Ocean Protection Coalition (NOPC) in Auftrag gegeben, weil die Kluft zwischen den öffentlichen Behauptungen und der fundierten Technik immer größer wird. Die NOPC bringt mehr als 90 Organisationen zusammen, um Meeresschutzgebiete und ortsbezogenen Meeresschutz in den Vereinigten Staaten zu schaffen und zu unterstützen.
In dem Bericht wird auch detailliert auf die Impossible Metals eingegangen, ebenso wie auf die Metals Company, die ein herkömmliches Raupenfahrzeug einsetzt, welches Manganknollen aufsaugt und über eine vertikale Steigleitung zu einem Produktionsschiff hinaufpumpt. Auch andere Unternehmen werden erwähnt, darunter Nautilus Minerals und GSR, die bislang keine Erfolge vorweisen können.
Ebenfalls im Januar 2023 zeigt die chinesische Firma JKDESIGN Ltd. den aerodynamisch und robust gestalteten Entwurf eines ROV, das eine neuartige Anordnung von sechs Propellern in einer 3×3-Formation verwendet, die ihm eine bessere Kontrolle und hohe Agilität unter Wasser verleiht.

(Grafik)
Die SHARK getaufte und für die Erkundung der Tiefsee entwickelte Unterwasserdrohne wird von Tauchern ferngesteuert, welche die Videoübertragungen von dem, was die Drohne sieht, zurückgesendet bekommen, um sie effizienter zu steuern. Hierzu befindet sich an der Vorderseite des Geräts eine Kameraanordnung mit mehreren kleineren Linsen und Sensoren zur Hindernisvermeidung und Umgebungserfassung sowie einer größeren Hauptlinse für Forschung und Dokumentation.
Über die beeindruckenden Grafiken hinaus gibt es jedoch keinerlei Details zu den Maßen, zum Antrieb, zur Batterie oder zu weiteren technischen Ausstattungen. Auch über eine Umsetzung ist bislang nichts zu finden.
Hinweis: Die Designfirma sollte nicht verwechselt werden mit der JK Design in Lambertville, New Jersey, einer Full-Service-Kreativagentur; der britischen, blechverarbeitenden JK Design & Manufacture Ltd. in Nottingham; der JK Design LLC aus Social Circle, Georgia, die u.a. Türen für Mehrfamilienhäuser herstellt; der JK Design Build Ltd. im britischen Southall; der JK Design im deutschen Kreuzau, einem Planungsbüro; oder der JK Designs Sheffield, die sich mit Einrichtungstextilien befaßt. Der Name scheint also äußerst beliebt zu sein.
Im Mai 2023 folgen Berichte über die Unterwasserdrohne Tethys One, die speziell für die Suche nach menschlichen Leichen oder anderen unter Wasser liegenden Gegenständen entwickelt wurde. Das Gerät, das sowohl als ROV als auch als AUV funktioniert, wird von der Firma Tethys Robotics hergestellt, einem Spin-off der ETH Zürich. Die Firma hat ihren Namen von der Figur der Tethys in der griechischen Mythologie, die die Frau des Gottes Ozeanus und Mutter der Flußgötter ist.
Die Firma war 2018 von Jonas Wüst und Pragash Sivananthaguru gegründet worden und hatte in vier Monaten den Prototyp Scubo entwickelt, um an der internationalen MATE ROV Competition teilzunehmen (s.u.), die als der weltweit größte Wettbewerb für ferngesteuerte Vehikel bezeichnet wird. Die Tethys Robotics landet dabei unter den Top 10. Im Jahr 2021 folgt der batteriebetriebene, modular aufgebaute Proteus Prototyp V1, der bis zu 300 m tief tauchen kann, und 2022 der Proteus Prototyp V2, aus dem dann der aktuelle Tethys One entsteht.

Über eine verknüpfte Steuereinheit programmieren die Nutzer die neue Unterwasserdrohne zunächst für einen Fluß-, See- oder Meeresabschnitt, den das Fahrzeug überprüfen soll. Dann setzen sie die Drohne ins Wasser und lassen sie das Gebiet autonom nach Objekten der gewünschten Art absuchen, wobei sie eine Kombination aus Kameratechnologien, akustischen Sensoren und KI nutzt, um ihr Ziel zu identifizieren.
Sobald ein Ziel geortet wurde, wird der Bediener alarmiert, damit er die Drohne über ein Glasfaserkabel manuell steuern kann. Diese ist in der Lage, mit ihrem Robotergreifer Objekte mit einem Gewicht von bis zu 40 kg zu bergen und an die Oberfläche zu befördern. Sollte der Gegenstand schwerer sein, kann dessen genaue Position für die Bergung durch Taucher markiert werden.
Die Tethys One wiegt außerhalb des Wassers 30 kg, erreicht eine Höchstgeschwindigkeit von 2 m/s, eine maximale Tiefe von 300 m und hat eine Reichweite von bis zu 10 km. Eine Ladung des im laufenden Betrieb austauschbaren Lithium-Akkus reicht für vier Stunden Betrieb. Nach Angaben der Firma wurde die Drohne bereits von mehreren Seiten bei Such- und Rettungsaktionen unter Wasser eingesetzt - und soll nun im vierten Quartal dieses Jahres auf den Markt kommen.
Hinweis: Die Tethys One hat nichts zu tun mit dem gleichnamigen AUV Tethys, das bereits 2010 von Ingenieuren des Monterey Bay Aquarium Research Institute gebaut wurde (s.d.).
Was den erwähnten MATE-Wettbewerb anbelangt, so stellt sich im Zuge
der Recherchen heraus, daß es weltweit schon mehrere Roboter-U-Boot-Wettbewerbe für
studentische Teams gibt, die sicherlich eine eigene Übersicht verdienen,
was aus Zeitgründen aber nicht machbar ist. Sie sollen hier jedoch
zumindest namentlich kurz genannt werden, ohne Anspruch auf Vollständigkeit,
geordnet nach dem Beginn ihrer Aktivität:
- RoboSub des U.S. Office of Naval Research (ONR) und der RoboNation (früher: Autonomous Underwater Vehicle Competition der AUVSI Foundation), fand erstmals im Jahr 1998 statt. Für selbstfahrende Überwasserschiffe gibt es einen eigenen Wettbewerb namens RoboBoat.
- MATE ROV Competition des Marine Advanced Technology Education (MATE) Center in Kalifornien, fand erstmals im Jahr 2002 statt.
- SeaPerch des Massachusetts Institute of Technology Sea Grant (MITSG) College Program fand erstmals im Jahr 2003 statt.
- Student Autonomous Underwater Challenge – Europe (SAUC-E) der britischen und französischen Verteidigungsministerien, fand erstmals im Jahr 2006 statt.
- National Underwater Robotics Competition der Arizona Promoters of Applied Science in Education (APASE), fand erstmals im Jahr 2009 statt.
- Maritime RobotX Challenge in Singapur, fand erstmals im Jahr 2014 statt.
- SUBS in Schools Technology Challenge von ReEngineering Australia, dem australischen Verteidigungsministerium und der Industrie, fand erstmals im Jahr 2014 statt.
- Underwater Robot Competition der Hong Kong University of Science and Technology (HKUST), fand erstmals im Jahr 2015 statt.
- European Robotics League in den Bereichen der Robotik Luft, Land und Meer, organisiert vom SciRoc-Konsortium unter Führung der University of the West of England, fand erstmals im Jahr 2016 statt.
- Singapore AUV Challenge (SAUVC) der IEEE Oceanic Engineering Society (OES) Singapore Chapter, fand erstmals im Jahr 2016 statt.
- Unmanned Underwater Systems Competition, fand erstmals im Jahr 2018 statt und wird später als Teil des TEKNOFEST-Festivals in Istanbul abgehalten.
- TAC Challenge des Tau Autonomy Centre in Norwegen, fand erstmals im Jahr 2021 statt.
- World University Underwater Robotics Competition (WUURC) der Chinese Society of Naval Architects and Marine Engineers sowie der Harbin Engineering University, fand erstmals im August 2022 statt.
- Robotics for Asset Maintenance and Inspection (RAMI) competition, wurde im Rahmen des EU-geförderten Forschungsprojekts METRICS (Marine Robotic Tasks and Intelligent Control Systems) begründet und fand erstmals im Jahr 2022 statt.
- Azerbaijan ROV Challenge von STEAM Azerbaijan, fand erstmals im Jahr 2025 statt.
Im Jahr 2024 wird im Februar über zwei neue AUVs berichtet, die im Rahmen des FuE-Projekts ,Mobiles Autonomes Unterwassersystem’ (MAUS), das von März 2019 bis Februar 2023 durchgeführt wurde, an der Fachhochschule Kiel entwickelt worden sind. An dem vom Land Schleswig-Holstein mit gut 877.000 € geförderten Projekt beteiligt waren ferner die Universität zu Lübeck, die Christian-Albrechts-Universität zu Kiel (CAU) sowie die Firmen SubCtech GmbH und emma technologies GmbH.

und Gretel
Die unter Leitung der Professorin für Unterwasser-Informationstechnik Sabah Badri-Höher - Gewinnerin des Innovationspreises 2021 der Landeshauptstadt Kiel - konstruierten Prototypen tragen die Namen Hänsel und Gretel, wiegen jeweils 50 kg, sind 1,25 m lang, 56 cm breit und 40 cm hoch und sollen in Herstellung und Wartung besonders günstig sein. Sie können unkompliziert transportiert werden und benötigen keinen Kran an Bord von Forschungsschiffen, um zu Wasser gelassen zu werden. Ihre Sensorik ist für Wassertiefen bis 200 m ausgelegt.
In ihren Fähigkeiten ergänzen sich die beiden AUVs: Während es sich bei Hänsel um ein mit Nahbereichssensoren ausgestattetes Fahrzeug handelt, besitzt Gretel eine Fahrfähigkeit über lange Strecken. Im Einsatz fährt sie schnell voraus und erkundet mit Hilfe ihrer akustischen Sensoren die Umgebung. Stößt sie auf eine Anomalie, meldet sie deren Position an Hänsel und setzt dann ihre Kartierung fort. Hänsel macht sich seinerseits auf den Weg, um vor Ort mit den Nahbereichssensoren detailliertere Messungen vorzunehmen und die Anomalie zu dokumentieren.
Um kooperieren zu können, müssen die beiden AUVs kommunizieren. Da die Bandbreite der akustischen Unterwasserkommunikation begrenzt ist, werden zwei Nahbereichsmodems auf Basis optischer und magnetischer Datenübertragung entwickelt, implementiert und getestet. Die Fahrzeuge kommunizieren durch blinkende LEDs - und in Kombination mit einem akustischen Modem lassen sich so bisher unerreichte Niveaus der Kommunikation und Navigation realisieren.
Das akustische Modem stellt einen dauerhaften Kommunikationskanal mit einer Reichweite von etwa 1 km bereit, während die optischen und magnetischen Modems eine hochratige Nahbereichskommunikation zwischen den Unterwasserrobotern ermöglichen. An der Oberfläche erfolgt die Kommunikation mit ihnen per Funk. Nun sucht das Team Kooperationspartner, um Hänsel und Gretel in der Praxis zu erproben und die Arbeit an ihnen fortzusetzen.
Im März 2024 folgen Berichte über ein von dem belgischen Unternehmen uWare Robotics entwickeltes AUV, das integrierte Kameras, eine IMU (Inertial Measurement Unit) und andere Technologien verwendet, um autonom einer vorprogrammierten Unterwasserflugbahn zu folgen. Diese Daten werden drahtlos in den Bordcomputer des Fahrzeugs hochgeladen, bevor es von seinem Benutzer gestartet wird.

Das uOne ist in erster Linie für Aufgaben wie die Inspektion von Unterwasserstrukturen wie Ölplattformen und Pipelines auf dem Meeresboden gedacht und hierzu sowohl mit einem nach vorne gerichteten stereoskopischen HD-Kamerasystem als auch mit einer nach unten gerichteten Kamera ausgestattet. Es kann 3D-Punktwolken-Karten seiner Umgebung erstellen und ist darüber hinaus in der Lage, alle interessanten Orte, auf die es stößt, zu identifizieren und zu inspizieren. Die gesammelten Daten werden auf einem Solid-State-Laufwerk an Bord gespeichert und drahtlos heruntergeladen, sobald die Mission beendet ist und das AUV zu seiner Basis zurückgekehrt ist.
Das uOne ist 40 cm hoch, 40 cm breit und 50 cm lang, wiegt außerhalb des Wassers 15 kg und kann bis zu 5 kg Sensoren, Beleuchtung oder andere Gegenstände tragen. Es besitzt acht Triebwerke, die es ihm ermöglichen, auf der Stelle zu schweben oder sich je nach Bedarf in jede beliebige Richtung zu bewegen.
Das Tauchgerät hat eine Höchstgeschwindigkeit von 3 Knoten (5,5 km/h) und eine Betriebszeit von etwa zwei Stunden pro Aufladung des austauschbaren Akkus. Mit seinem derzeitigen Gehäuse aus gegossenem Acryl kann das AUV bis zu einer maximalen Tiefe von 75 m abtauchen. Ein Aluminiumgehäuse, mit dem es noch tiefer kommt, ist bereits in Arbeit. Das Unternehmen spricht zwar von ersten Kunden, es lassen sich aber keine Bestätigungen dafür finden - und inzwischen scheint die 2018 gegründete uWare Robotics ihre Aktivitäten eingestellt zu haben.
Über eine besonders interessante technische Umsetzung berichtet im April 2024 ein Team der Rice University in Houston, Texas. Die Ingenieurstudenten sind von der Überlegung ausgegangen, daß Taucher aufblasbare Auftriebskontrollgeräte (Buoyancy Control Device, BCD) verwenden, um den Auftrieb während des Tauchgangs zu verändern und sich vertikal in der Wassersäule zu bewegen. Die gängigsten Versionen sind Tarierwesten und Tauchflügel, die hierzu mit Luft gefüllt oder entleert werden.

Um dieses Prinzip auf Unterwasserroboter anzuwenden, nutzt das BayMax-Team reversible Brennstoffzellen, die Wasser spalten bzw. die Gase wieder in Flüssigkeit umwandeln, und integriert vier dieser Geräte in ein selbstgebautes ROV namens Monarch. Wenn das ROV seinen Auftrieb erhöhen muß, wird destilliertes Wasser in den Brennstoffzellen in Wasserstoff- und Sauerstoffgas umgewandelt, welche die Ballons aufblasen, die sich oben auf jeder Zelle befinden. Soll das Fahrzeug seinen Auftrieb verringern, werden diese Gase wieder in Flüssigkeit umgewandelt, wodurch sich die Ballons entleeren.
Dem Team zufolge ist die Technologie wesentlich energieeffizienter als herkömmliche Methoden, um sich im Wasser auf und ab zu bewegen, wie der Einsatz leistungsstarker elektrischer Triebwerke oder einer elektrischen Pumpe, um Wasser aus den Ballasttanks an Bord anzusaugen, wobei in beiden Fällen eine beträchtliche Menge an Batteriestrom verbraucht wird. Der Elektrolyseprozeß verbraucht zwar auch etwas Strom, aber deutlich weniger, als für das Auf- und Abtauchen mit Hilfe von Schubdüsen erforderlich ist.
Die neue Technologie kann außerdem dazu genutzt werden, das ROV waagerecht im Wasser zu halten, indem die einzelnen Zellen bei Bedarf automatisch aktiviert werden. Und die von den Brennstoffzellen erzeugte Elektrizität könnte sogar für den Antrieb des ROV genutzt werden. Darüber hinaus sollen die Brennstoffzellen leichter und kostengünstiger sein als Vertikalstrahlruder und auch viel leiser, so daß sie die Unterwasserwelt weniger aufschrecken.
Das Projekt, das unter der Leitung der Professoren Laura Schaefer und Fathi H. Ghorbel von der Rice University sowie Zheng Chen von der University of Houston durchgeführt wurde, war durch eine Veröffentlichung vom Juni des Vorjahres inspiriert worden, der zufolge eine brennstoffzellengestützte Tiefensteuerung den Energieverbrauch von AUVs im Vergleich zu herkömmlichen Strahlrudern um bis zu 85 % senken könnte (,Energy Efficient Depth Control for Underwater Devices Using Soft and Hard Actuators’).
Das Projekt gewinnt umgehend den zweiten Platz beim Willy Revolution Award der Rice University für herausragende Innovation. Über eine kommerzielle Umsetzung ist bislang nichts bekannt.
Im Juni 2025 meldet die britische Royal Navy, daß sie den Einsatz von Robotern zum Aufspüren und Sprengen von Minen und anderen Gefahren testet, die in der Nähe von lebenswichtigen, aber gefährdeten Unterwasserkabeln und Pipelines aufgespürt werden, und dies in größeren Tiefen, als sie ein menschlicher Taucher sicher erreichen könnte.

der Royal Navy
Dem Bericht zufolge wurden alleine seit 2023 fünf Unterseekabel und zwei Pipelines in der Ostsee beschädigt, 16 Kabel rund um Taiwan und eine Pipeline im Roten Meer. Sie wurden entweder absichtlich oder zumindest unter verdächtigen Umständen durchtrennt oder beschädigt. Hinzu kommen weltweit bis zu 200 Vorfälle, die auf Unfälle mit schleppenden Ankern oder verheddertem Fanggerät zurückzuführen sind.
Um dieser Bedrohung zu begegnen, sollen ROVs eingesetzt werden, die vom britischen Defence Science and Technology Laboratory (Dstl) und Partnern aus der Industrie modifiziert wurden, um mit einer Vielzahl von Bedrohungen fertig zu werden. Dazu zählen aktive Minen, die absichtlich gelegt wurden, alte Minen und Fliegerbomben, die sich zufällig in der Nähe befinden, sowie Spionagegeräte, mit denen Kommunikationskabel angezapft werden können.
Um die Standards der Marine zu erfüllen, werden kommerzielle ROVs mit Upgrades versehen. Dazu gehören Systeme zur Erkennung von Sprengstoffen, eine Härtung, um über lange Zeiträume in Tiefen zu arbeiten, und Manipulatoren, um eine Sprengladung zu tragen und in der Nähe der Bedrohung zu plazieren. Darüber hinaus gibt es ein ferngesteuertes Bildgebungssystem, das visuelle und Sonar-Bilder in Echtzeit an die Bediener auf dem Mutterschiff sendet.
Seeversuche mit den Robotern, bei denen diese Sprengladungen absetzen, die anschließend zur Explosion gebracht werden, erfolgen auf der Horsea-Insel in Portsmouth, im Hafen von Portland, im Bristolkanal und in der Nordsee vor der norwegischen Küste.
In Verbindung mit der akustischen Unterwasserkommunikation ist zu
erwähnen, daß Forscher des Massachusetts Institute of Technology (MIT)
um Daniel Freeman im November 2025 berichten,
daß sie ein neuartiges Hydrofon entwickelt haben,
das auf einem einfachen, handelsüblichen Mikrofon basiert. Das Gerät,
bei dem ein mikroelektromechanisches System (MEMS) zum Einsatz kommt,
ist deutlich kleiner und preiswerter als derzeitige Hydrofone, hat
aber die gleiche oder sogar eine höhere Empfindlichkeit.
Das neue Unterwassermikrofon wurde in Zusammenarbeit mit Forschern der Tufts University sowie den Industriepartnern Navmar Applied Sciences Corp. und SeaLandAire Technologies hergestellt und bei Feldversuchen in tiefem Wasser erfolgreich getestet. Der robuste und leistungsstarke Prototyp kann aufgrund seiner geringen Größe, seines effizienten Stromverbrauchs und seiner niedrigen Kosten in einer Vielzahl von kommerziellen und militärischen Anwendungsbereichen eingesetzt werden.
Ebenso interessant ist eine Meldung vom Dezember, die eine Lösung
für das Problem bietet, daß sich Schall in Medien unterschiedlicher
Dichte auch unterschiedlich ausbreitet, was zu einem hohen akustischen
Impedanzverhältnis zwischen Luft und Wasser führt, wodurch die Schallwellen
die Luft-Wasser-Grenze nur schwer durchbrechen können.
Um die Schallübertragung zwischen den beiden Medien zu verbessern, simuliert der Doktorand Hesam Bakhtiary Yekta an der Rutgers University ein bereits zum Patent angemeldetes Metamaterial, das an der Luft-Wasser-Grenze sitzt und die Schallübertragung erleichtert - und damit die Kommunikation etwa zwischen einem Unterwasserroboter und einer Drohne. Der Roboter könnte ein akustisches Signal mit einer bestimmten Frequenz an die Struktur senden, die so konstruiert ist, daß sie bei dieser Frequenz mitschwingt und den Schall vom Wasser in die Luft weiterleitet.
Die Struktur des Metamaterials besteht aus drei Aluminiumplatten, die durch Säulenrippen aus Stahl verbunden sind, welche die Struktur zusammenhalten und ihr akustisches und resonantes Verhalten bestimmen. Als nächster Schritt soll ein Experiment durchgeführt werden, um die Simulation und die bislang nur theoretischen Ergebnisse auf ihre Praktikabilität hin zu überprüfen.
Nach diesem umfassenden Schwerpunkt geht es nun weiter mit der allgemeinen Jahresübersicht 2015.

So stellt die Konstanzer Firma zebotec GmbH im Juli einen gemeinsam mit der Sensor-Technik Wiedemann GmbH (STW) aus Kaufbeuren entwickelten elektrischen Notantrieb für Schiffe vor, der helfen soll, falls der übliche Diesel-Hauptantrieb ausfällt oder der Treibstoff plötzlich ausgeht. Die Lösung kombiniert einen völlig unabhängigen batterieelektrischen Nebenantrieb von ca. 110 PS mit einem 360° drehbaren Pump-Jet, der das Schiff auch alleine bewegen kann.
Die Batterie ist ein modulares Lithium-Ionen-System, das zwei redundante 26 kWh Stränge besitzt und eine rein elektrische Betriebszeit von mindestens 30 Minuten bei 60 kW Leistung ermöglicht. Das System wird erstmals bei der im April vom Stapel gelaufenen Bohemia Rhapsody installiert, einem 45 m langen und 7,5 m breiten Passagierschiff der Schiffswerft Bolle GmbH Derben in Sachsen-Anhalt, das Platz für 220 Passagiere bietet und mit Beginn der Saison bei Prague Boats s.r.o. auf der Moldau im Einsatz ist.
Über weitere Umsetzungen ist nichts bekannt, die zebotec tritt später nur noch als Systemintegrator für die Steuerung von PV-Kraftwerken in Erscheinung.
Ebenfalls im Juli 2015 gehen in Rotterdam die Schlepper Fairplay
IX und Fairplay XI der Reederei Fairplay
Towage (o. Fairplay Schleppdampfschiffs-Reederei Richard Borchard
GmbH) in Betrieb, die mit kompletten Hybridsystemen der Firma Schottel ausgestattet
sind. Diese bestehen aus je zwei Ruderpropellern mit Hybridgetriebe,
zwei Elektromotoren sowie einer speziell auf Hybridantriebe ausgerichteten
Steuerung.
Die neuen Hybrid-Traktor-Schlepper haben eine Länge von 29,67 m und eine Breite von 13,50 m und wiegen 90 Tonnen. Während bei Teillast die Elektromotoren (je 600 kW) ausreichend Kraft zur Verfügung stellen, übernehmen die beiden MTU-Dieselmotoren (je 2.240 kW) die Arbeitsvorgänge bei Vollast. Die Elektromotoren können zusätzlich, je nach Kraftbedarf, flexibel zugeschaltet werden. Maximal erreichen die Schlepper einen Pfahlzug von 90 Tonnen und fahren mit einer Geschwindigkeit von 13,5 Knoten.
Auf der Messe Interboot 2015 im September in Friedrichshafen präsentiert die in Wien ansässige Chilli Island GmbH eine winzige Badeinsel, die auf den ersten Blick eher wie ein Poolsessel oder ein Schleppboot aussieht, und nicht wie ein motorisiertes Wasserfahrzeug.

(Grafik)
Tatsächlich ist die neue Alternative zu anderen leichten Wasserfahrzeugen, wie z.B. Tretbooten, jedoch mit Elektromotor, Soundanlage und Getränkekühler ausgestattet, weshalb das Unternehmen der Meinung ist, daß das Boot Potential für Strandbäder, Hotels, Seen und andere Ziele hat, die Entspannung und Spaß auf dem Wasser bieten - in der Premiumvariante sogar mit Unterwasserscheinwerfer und GoPro-Kamera.
Anstelle einer traditionellen Rumpfstruktur ist das Chilli Island genannte Wasserfahrzeug eher wie ein offener, schwimmfähiger Liegestuhl für zwei Personen aufgebaut. Es mißt 2,50 x 2,25 m und wiegt 200 kg. Der Körper besteht aus Polyethylen, das auf einem Glasfaserrahmen aufgebaut ist, und umhüllt jeden Passagier mit einem ergonomischen Ganzkörpersitz, der auch als Rutsche dienen kann, um ins Wasser zu gleiten. Haltegriffe helfen dabei, wieder an Bord zu kommen. Dazu gibt es ein von Palmen inspiriertes, dreiteiliges, verstellbares Sonnenschutzsystem.
Die kleine Elektroboot-Insel ist sowohl mit 0,5 kW als auch mit 1 kW Torqeedo-Elektromotoren erhältlich, die mit einem Paar 300 Ah Batterien eine Laufzeit von bis zu sechs Stunden ermöglichen. Geschwindigkeit und Richtung werden über einen zentralen Trackball gesteuert.
Das Basismodell Classic mit 0,5 kW Motor und 40 W Soundsystem kostet 9.985 €, höher spezifizierte Modelle beinhalten einen 1 kW Motor, ein 80 W Soundsystem sowie zusätzliche Sound- und Lichteffekte. An Händler sollen die Schwimminseln für 6.000 € verkauft werden. Das von Alexandra Kraft im Jahr 2014 gegründete Unternehmen ist inzwischen aber nicht mehr auffindbar.

Auf der gleichen Messe wird von der im Vorjahr gegründeten deutschen Firma J-Force mit Sitz in Stuttgart ein innovatives elektrisches Surfboard vorgestellt, das über einen drahtlos verbundenen, neoprenartigen Handschuh gesteuert wird. Man muß nur den Zeigefinger beugen, um loszufahren, und ihn strecken, um den E-Antrieb zu verlangsamen. Der eFlex-Handschuh verfügt auf dem Handrücken außerdem über ein digitales Display für Informationen wie verbleibende Batterieleistung und Reichweite.
Das 25 kg schwere eBoard mit einer Höchstgeschwindigkeit von rund 55 km/h gilt als eines der schnellsten elektrischen Boards auf dem Markt und verfügt über einen Elektro-Zweistrahlantrieb mit 11 kW (15 PS) nebst entsprechendem Lithium-Ionen-Akku mit einer Ladezeit von zwei Stunden, der anschließend ein Surfen von 20 - 30 Minuten erlaubt.
Der Preis des relativ dünnen, wendigen Surfbretts liegt bei 13.990 € für das personalisierte, limitierte First Edition-Modell und bei 12.590 € für das Standardmodell. In beiden Versionen sind der eFlex-Controller, das Ladegerät, eine Boardtasche und weiteres Zubehör enthalten. Die Auslieferung soll im November beginnen.
Daneben zeigt J-Force auf der Interboot auch die Konzeptversion eines eJet, der sich noch in der Entwicklung befindet, ein 350 kg schweres, vollelektrisches Wassermotorrad (PWC) mit einem 320 PS starken Elektroantrieb und einer Laufzeit von etwa zwei Stunden. Die Firma plant, den eJet im nächsten Jahr auf den Markt zu bringen, und veranschlagt einen Preis von 35.000 €. Über diese Art von Wasserfahrzeugen wird in einer späteren Übersicht noch ausführlicher berichtet.

(Grafik)
Im August 2015 präsentiert der Industriedesigner Imran Othman aus Singapur mit seinem Jong 2020 das Konzept eines kompakten, tragbaren Rettungsschwimmgeräts, das dem Retter die Mobilität, Geschwindigkeit und Benutzerfreundlichkeit bietet, die für effiziente und sichere Einsätze in Katastrophensituationen erforderlich sind.
Ohne im Detail auf technische Spezifikationen einzugehen, stellt sich der Entwickler ein Gerät vor, das zum Einsatz gebracht wird, indem an der vorderen Komponente gezogen wird, um das Aufblassystem zu aktivieren. Daraufhin füllen sich die vier zylindrischen Gummiarme und machen das Boot bereit für die Navigation. Erreichte Überlebende können sich dann an diesen Gummiarmen festhalten, während das Boot sie aus dem Wasser zieht.
Zur Steuerung fließt Wasser vom vorderen Teil in das Boot und tritt in Richtung Ruder aus, um die Richtung des Bootes zu kontrollieren. Es wird allerdings nichts darüber gesagt, wie das Wasserfahrzeug angetrieben wird.
Die 2014 gegründete niederländische Firma SoelYachts stellt im September dieses Jahres ein durch Sonnenenergie angetriebenes Ökotourismus-Ausflugsboot vor, das von den Gründern Joep Koster und David Czap entworfen wurde. Letzterer ist auch Mitbegründer von Czeers Solar Boats und Naval DC, die bereits 2008 mit dem Czeers Mk1 das erste Solar-Rennboot der Welt konstruiert hatten. Andere Quellen nennen 2007 als Datum.

Das Dach der neuen SoleCat 12 dient zum einen als Sonnenschutz für die Passagiere und ist zum anderen mit 8,6 kW Solarpaneelen bestückt, die zwei 30 kW Elektromotor antreiben. An Bord befinden sich zudem zwei 60 kWh Lithium-Polymer-Batterien, die alleine einen Betrieb über sechs Stunden bei einer Geschwindigkeit von 8 Knoten erlauben, oder um nachts bzw. bei extrem schlechtem Wetter zu fahren. Die Energie kann aber auch für einen Extraschub eingesetzt werden: Mit Hilfe der Batterien erreicht der Solarkatamaran dann eine Geschwindigkeit von bis zu 15 Knoten.
Wenn das Schiff gerade nicht im Einsatz ist und an einer Anlegestelle an abgelegenen Orten liegt, kann die Batterie auch als Energiespeicher genutzt werden, weshalb eigens ein Anschluß nach außen integriert ist. Das mobile Kraftwerk der SoelCat 12 ist in der Lage, 6 kVA Wechselstrom zu liefern, was sie zu einer idealen autonomen Basis für z.B. wissenschaftliche Korallenriff-Forschungen oder Expeditionen in die Meereswelt macht.
Gebaut ist das 11,8 m lange, 5,80 m breite und 4,6 t schwere Schiff, auf dem bis zu 24 Personen (andere Quellen: 12) und zwei Crewmitglieder Platz finden, aus Glasfaserverbundwerkstoff, der leicht und besonders gut gegen Salzwasser geschützt ist. Der Platz an Deck ist vollständig anpaßbar, und für den Tauchbetrieb bietet das Schiff Stauraum für die Tauchflaschen und Naßräume für die Tauchausrüstung.
Besonders bemerkenswert ist, daß die SoelCat 12 als modulares Schiff konzipiert wurde, das auf Bestellung gefertigt und in 12 m lange Schiffscontainer verpackt werden kann, um anschließend bei der Ankunft montiert zu werden. Der Preis des Katamarans wird mit rund 562.000 $ angegeben, das erste Exemplar soll noch in diesem Jahr 2015 ausgeliefert werden.

Soel Shuttle 14
Tatsächlich wird der erste SoelCat 12, der auf einer Werft in Auckland, Neuseeland, gebaut wurde, aber erst im Juli 2017 im Pearl Beach Resort and Spa auf Bora Bora in Französisch-Polynesien in Betrieb genommen. Zu diesem Zeitpunkt werden als Preis 600.000 $ genannt.
Im Jahr 2019 beginnt Soel Yachts mit der Produktion des neu entwickelten Soel Shuttle 14 in Qingdao, China, und immer noch speziell für das Bora Bora Pearl Beach Resort. Die Elektroyacht ist mit einer Batteriekapazität von 106 kWh und 80 kW Motorleistung ausgestattet und kann eine Höchstgeschwindigkeit von 14 Knoten erreichen. Auch sie bietet Platz für bis zu 24 Passagiere und ihr Gepäck, und das Layout kann je nach Kundenwunsch angepaßt werden. Ab 2021 werden dann 14 Exemplare ausgeliefert.
Im selben Jahr wird auch die Soel Senses-Serie eingeführt, die mit dem Entwurf der 14,5 m langen Soel Senses 48 für einen Kunden auf den Britischen Jungferninseln beginnt. 2022 folgt das Projekt der 18,6 m langen Soel Senses 62 für einen Schweizer Kunden. Der neue und bislang größte Katamaran von Soel Yachts wird im April offiziell der Öffentlichkeit vorgestellt.
Da es sich um eine Yacht handelt, mangelt es nicht an Luxus und Platz, einschließlich Schlafplätzen für neun Passagiere und drei Besatzungsmitglieder, die über separate Kabinen mit Außenzugang verfügen. Die Senses 62 bietet außerdem mehrere Lounges, zwei Eßbereiche, einen Bürobereich und eine offene Kombüse mit Bar.

Die Elektroyacht besitzt ein integriertes 17,6 kW Solardach, dessen Solarmodule mit einem speziell entwickelten aktiven Kühlsystem ausgestattet sind, welches die Energieausbeute um 15 - 20 % erhöht. Daneben verfügt das Schiff über eine Gleichstrom-Schnellademöglichkeit sowie über eine ein- und dreiphasige Landstrom-Lademöglichkeit.
Zudem gibt es zwei verfügbare Antriebssysteme. Einmal Cruise: 2 x 100 kW Elektromotoren, 282 kWh Lithium-Batterie und ein 100 kW Gleichstromgenerator, was eine Reisegeschwindigkeit von 8 Knoten und eine Höchstgeschwindigkeit von 10 Knoten ermöglicht; sowie Power: 2 x 200 kW Elektromotoren, 424 kWh Lithium-Batteriekapazität und ein 150 kW Gleichstromgenerator, was eine Reisegeschwindigkeit von 10 Knoten und eine Höchstgeschwindigkeit von 14 Knoten erlaubt. Zusätzlich zum Power-System bietet die Firma an, weitere Batteriekapazität bis zu 564 kWh hinzuzufügen.
Laut Soel Yachts ermöglichen die oben genannten elektrischen Antriebssysteme in Kombination mit den PV-Paneelen, daß die Senses 62 ,trans-ozeanisch’ ist, was darauf anspielt, daß die Yacht über Ozeane fahren kann. Die Reichweite, die mit der 564 kWh Batterie erzielt wird, soll bei einer Geschwindigkeit von 4 Knoten fast 490 km betragen. Der Preis für die Soel Senses 62 solar electric beginnt bei 2,7 Mio. €.
Ab 2023 wird dann am Design der Soel Senses 82 gearbeitet, einem 24,6 m langen solarbetriebenen ,Weltentdecker’. Daneben gibt es noch eine nachhaltige, multifunktionale, schwimmende Insel namens Soel Haven, die bislang aber nur als Grafik existiert.
In den Niederlanden geben die in diesem Jahr neu gegründete Biokraftstoffirma GoodFuels
Marine, die Seebaggerfirma Boskalis (Royal
Boskalis Westminster N.V.) sowie der finnische Kraftwerks- und Schiffsmotorenhersteller Wärtsilä im
Oktober 2015 eine Partnerschaft bekannt, um im Rahmen
eines zweijährigen Pilotprogramms die Entwicklung nachhaltiger, skalierbarer
und erschwinglicher Biokraftstoffe für die Schiffahrt
zu beschleunigen.
Diese Treibstoffe werden in einem eigenen Kapitel behandelt (Update in Arbeit), doch soll hier kurz und exemplarisch auf den aktuellen Stand der Dinge im Bereich der Schiffahrt eingegangen werden.
Wärtsilä hatte bereits im September 2010 ein Szenario des Schiffsverkehrs im Jahr 2030 veröffentlicht, das neben nachhaltigen Kreuzfahrtreisen und Mega-Containerschiffen auch Entsalzungs-, Abfallentsorgungs- und Recyclingschiffe prognostizierte, die außerhalb der Küstenstädte vor Anker liegen und für ihren Betrieb erneuerbare, biobasierte Kraftstoffe nutzen.

Der Schwerpunkt des neuen Programms liegt auf der Lieferung und Analyse eines nachhaltigen Rohstoffs, der Zertifizierung durch die Industrie und der Vorbereitung der Bausteine für eine großtechnische Produktion. Darüber hinaus wird das Konsortium eine globale Studie zur Skalierbarkeit initiieren, an der Reeder, Universitäten, NGOs, Häfen, Biokraftstoffunternehmen und andere Akteure der Branche beteiligt sind. Ziel ist es, konkrete Möglichkeiten für die Ausweitung der Versorgung der weltweiten kommerziellen Schiffahrtsflotte zu ermitteln.
Auch einige andere Reedereien und Betreiber von Binnenschiffen experimentieren ab ca. 2015 mit Biokraftstoffen, die aus Abfallölen, Pflanzenölen und anderen erneuerbaren Quellen hergestellt werden, um Emissionen zu reduzieren.
Im Dezember 2018 kündigt die weltweit größte Containerschiff-Reederei Maersk Line an, daß ihre riesigen Containerschiffe ab dem Jahr 2050 keine CO2-Emissionen mehr verursachen sollen. Da eine rein elektrische Ozeanüberfahrt mit Containerschiffen bisher noch nicht möglich ist, forscht Maersk in verschiedene Richtungen. So wird neben dem Bereich der klassischen Elektroantriebe, des Wasserstoffantriebs und der Nutzung von Windkraft auch versucht, Biokraftstoff aus Algen herzustellen.
Das erste Containerschiff, das dann tatsächlich mit Biokraftstoff fährt, ist die Montreal Express von Hapag-Lloyd - was aber erst im Jahr 2025 geschieht. Das Schiff mit einer Tragfähigkeit von 4.400 Standardcontainern und einer Länge von 294 m verkehrt zwischen Europa und Kanada, und der eingesetzte Biokraftstoff besteht zu 20 % aus Speiseölen und Fettresten aus der Gastronomie. Die Testphase dient dazu, die Auswirkungen des Biokraftstoffs auf den Schiffsbetrieb zu prüfen. Bei positiven Ergebnissen soll das Konzept auch auf andere Containerschiffe des Konzerns ausgeweitet werden.
Maersk wiederum tut sich mit der Trident Maritime Systems Inc. zusammen, um eine 600 kWh Container-Batterie zu entwickeln, die auf einem Containerschiff zur Stromversorgung eingesetzt werden kann. Die Batterie soll im Dezember auf der 2011 gebauten Maersk Cape Town installiert werden, die unter der Flagge von Singapur fährt und Fracht zwischen Westafrika und Ostasien befördert. Die erste Reise mit der neuen Technologie wird Anfang 2020 stattfinden.
Das Batteriemodul ist so konzipiert, daß es den Platz eines Frachtcontainers auf dem Schiff einnimmt und im Hafen aufgeladen werden kann. Es wird zudem vom Schiffsgenerator und vom Abwärmerückgewinnungssystem der Cape Town geladen, wie es auf den meisten Maersk-Schiffen vorhanden ist. Die Batterie selbst wird den Generator des Schiffes entlasten, was die Wartungskosten des Generators senkt und die Ausfallzeiten verringert, und in Spitzenlastzeiten zusätzliche Energie liefern.
Im Juni 2021 ist dann wieder über den Einsatz von grünem Methanol zu hören, als Maersk bei der koreanischen Firma KSOE ein 2.100 Container fassendes Schiff mit Methanolantrieb bestellt, das Mitte 2023 in Betrieb gehen soll. Nur zwei Monate später folgt die Bestellung von acht neuen Schiffen bei der Hyundai Heavy Industries (HHI), die mit Motoren ausgestattet sein werden, die sowohl mit Methanol aus erneuerbaren Quellen als auch mit normalem Bunkerkraftstoff betrieben werden können.
Diese Schiffe werden 10 - 15 % teurer sein als normale Containerschiffe und 175 Mio. $ pro Stück kosten. Jedes Schiff kann 16.000 Container befördern und hat einem 16.000 m3 großen Tank für Methanol an Bord. Die Auslieferungen sollen im Jahr 2023 beginnen und Anfang 2024 abgeschlossen sein. Darüber hinaus besteht eine Option auf vier weitere Containerschiffe mit Methanol-Antrieb ab 2025.
Zudem unterzeichnet Maersk mit dem dänischen Unternehmen REintegrate einen Vertrag über die Herstellung von 10.000 Tonnen kohlenstoffneutralem E-Methanol für das erste der neuen Schiffe, und zu ihrer Finanzierung wird im November eine ,grüne Anleihe’ mit einer Laufzeit von zehn Jahren und einem Volumen von 500 Mio. € ausgegeben, die mit einem endgültigen Auftragsbestand von 3,7 Mrd. € mehrfach überzeichnet wird. Im Dezember 2021 wird dann das Design der 350 m langen und 53,5 m breiten Methanol-Containerschiffe vorgestellt, das eine um 20 % höhere Energieeffizienz pro transportiertem Container im Vergleich zum Branchendurchschnitt ermöglichen soll.
Auf einer offiziellen Pressekonferenz während des UN-Klimagipfels COP21 im November und Dezember 2015 in Paris stellt Peace Boat, eine seit 1983 bestehende japanische NGO, die sich für Menschenrechte und ökologische Nachhaltigkeit einsetzt, indem sie Friedensreisen auf gecharterten Passagierschiffen organisiert, ein neues, umweltfreundliches Schiffskonzept vor, das die Kreuzfahrtindustrie ein Stück ,grüner’ machen soll. Nicht zuletzt durch die fünf Decks umfassende, sich selbst versorgende Gartenanlage ,Plant Kingdom’ an Bord, die mit organischen Abfällen gedüngt wird und Abwasser verwendet, um Gemüse für die Schiffsküche zu ziehen.

(Grafik)
Das Projekt Ecoship betrifft einen 230 m (250 m) langen und 31 m (32 m) breiten Kreuzer, der 1.900 Passagiere (andere Quellen: 2.000 Passagiere) in 760 Kabinen befördern kann. Sein nach unten gebogener Bug und die hydrodynamisch optimierte Rumpfform sind einem Wal nachempfunden. Die Reisegeschwindigkeit soll bei 17,5 Knoten, die Höchstgeschwindigkeit bei 21 Knoten liegen. Der dieselelektrische Doppelantrieb, bestehend aus Elektromotoren und Hybridgeneratoren, ist an künftige Kraftstoffe wie Flüssiggas anpaßbar.
Die Architektur und das Außendesign des Ecoship werden seit 2012 von dem Büro Oliver Design aus Getxo in Spanien entwickelt, während die Arbeit von dem Schiffbauingenieur Andrés Molina koordiniert wird, einem langjährigen Projektleiter von Peace Boat.
Besonders ins Auge fallen die acht Segelmasten - in einigen Grafiken sind auch zehn zu sehen -, die im Durchschnitt für 10 % der Antriebskraft des Cruise-Liners sorgen sollen. Die ein- und ausfahrbaren Hightech-Segel, die bis zu einer Windgeschwindigkeit von 40 Knoten genutzt werden können, sind im doppelten Sinne Energieproduzenten: Ihre Flächen bestehen aus Solarzellen und produzieren neben dem Vortrieb gleichzeitig auch noch elektrische Energie. Darüber hinaus sollen an Deck zehn einziehbare Windturbinen verbaut werden, die bei guten Windbedingungen oder während des Aufenthalts im Hafenbecken mit 300 kW für rund 30 % der Stromversorgung an Bord sorgen.
Um den Energiebedarf weiter zu decken, werden außerdem 6.000 m2 Solarpaneele am Oberdeck und an den Flanken installiert, um 750 kW für die Beleuchtung des Schiffs bereitzustellen. Die gesamte mit Solarmodulen bedeckte Fläche beträgt aber 12.000 m2 und soll 100 % der Lichtquellen an Bord mit Energie versorgen. Fast alle größeren Bereiche des Schiffes, die dem direkten Sonnenlicht ausgesetzt sind, sind mit PV-Paneelen versehen. Auch die Verglasungen sind mit transparenten Modulen bestückt.
Weitere Energie wird zudem mit Hilfe kinetischer Bodenbeläge generiert, welche die Bewegungsenergie der darauf laufenden Passagiere in elektrische umwandelt - wie es ausführlich im Kapitel der Muskelenergie beschrieben wird (s.d.). Die Heizung und die Klimaanlage werden mit recycelter Abfallenergie betrieben, die aus dem Hauptmotor des Schiffes gewonnen wird, wodurch die Stromlast um 50 % reduziert wird. Außerdem soll ein Air-Lubrication-System, ein Bett aus Luftblasen, das unter den Bug des Schiffs geblasen wird, den Reibungswiderstand zwischen dem Schiffsrumpf und dem Seewasser verringern, was für weitere Energieeinsparungen sorgt. Diese Technologie wurde bereits in der Jahresübersicht 2013 präsentiert.
Der mit 55.000 (andere Quellen: 60.000) Bruttoregistertonnen vermessene Ozeandampfer, dessen Jungfernfahrt im Jahr 2020 zur gleichen Zeit wie die Olympischen Spiele Tokio geplant ist, soll nach seiner Fertigstellung das nachhaltigste und abgasärmste Kreuzfahrtschiff der Welt werden, indem es 20 % weniger Antriebsenergie benötigt und rund 40 % weniger Treibhausemissionen verursacht als vergleichbare, konventionelle Ausführungen.
Im Mai 2016 werden das Ecoship sowie die neuartigen Antriebssysteme auf der Blue Week in den Niederlanden vorgestellt - und im Mai 2017 unterzeichnet Peace Boat eine Absichtserklärung mit der finnischen Werft Arctech Helsinki Shipyard Inc. zum Bau des Schiffes. Im Februar 2020 wird zwar gemeldet, daß das Ecoship im April in einer Hamburger Werft fertiggestellt werden soll - doch danach ist nichts mehr darüber zu hören und außer hübschen Renderings auch nichts zu sehen.
Weiter mit den Elektro- und Solarschiffen...