Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2015 (G)
Im Juni 2015 vermelden die Fachblogs, daß nun auch
der japanische Elektronik-Riese Sony den Drohnen-Markt
betritt. Das Unternehmen arbeitet mit dem Autopilot-Technologie-Start-Up ZMP aus
Tokio zusammen, um als Tochter eine neue Drohnenfirma namens Aerosense zu
gründen. Die Drohnen der Firma werden die gleichen Sony-Bildsensoren
verwenden, die auch schon in Smartphones von Apple und Samsung verwendet
werden.

Die offizielle ab August bestehende Aerosense will Drohnen-Dienstleistungen für Unternehmen anbieten, um bei luftbasierten Landvermessungen und der Inspektion von Infrastruktur zu helfen. Direkt verkaufen will man die Drohnen aber nicht.
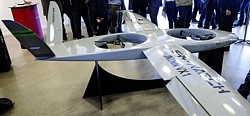
Im August werden Aufnahmen der senkrecht startenden Prototyps AS-DT01-E VTOL gezeigt, dessen zwischen den Flügeln angebrachtes Rotor-System für den horizontalen Flug gedreht werden kann. Das 720 x 160 x 60 cm große UAV wiegt einschließlich der Batterie 7 kg und ist in der Lage eine zusätzliche Nutzlast von bis zu 3 kg zu tragen. Bei einer Maximalgeschwindigkeit von 170 km/h soll es bis zu zwei Stunden am Stück fliegen können.
Aerosense selbst präsentiert sich gleichzeitig allerdings auch mit einem eher konventionellen, 3 kg schweren Quadrokopter namens AS-MC01-P.

(Grafik)
Die 2010 von Thomas Parrish IV gegründete
Firma OpenRobotix Labs mit Sitz in Rocky Mount, North
Carolina, erscheint erstmals im Juni 2015 in den Fachblogs,
als sie mit dem Sol-X - Mars Aerial Rover (o. Xsol-E1.1)
das Konzept eines solarbetriebenen Quadrokopters veröffentlicht, der
letztlich für den Einsatz auf dem Mars gedacht ist.
Bei Tests mit einem kleinen Modell im Zuge der 1. Projektphase gelingt es – ähnlich wie bei dem Solar-Copter der Queen Mary University of London im Jahr 2013 – die Solarenergie als ergänzende Stromquelle zu nutzen und die Flugzeit dadurch auf bis zu 250 % zu verlängern. Das Fluggerät ist mit einer 2.200 mAh Lithium-Power-Zelle ausgestattet, die eine Flugzeit von 12 Minuten erlaubt. Mit Unterstützung der PV-Zellen werden daraus bei voller Sonnenintensität bis zu 35 Minuten.

von OpenRobotix
Für die Finanzierung der Phasen 2 (eine vollständig getestete Prototyp-Version) und 3 (eine produktionsbereite Version) bis 2019 benötigt OpenRobotix geschätzte 300.000 $. Oberstes Ziel ist es, eine voll funktionsfähige Drohne zu bauen, die nicht nur zu langdauernden Flugmissionen fähig ist, sondern auch die Fähigkeit hat, in einer Atmosphäre mit geringer Dichte zu fliegen, wie die auf dem Mars. Die Drohne soll für die ersten privaten Explorationsmissionen zum Mars bereit sein, die voraussichtlich Ende 2019 oder Anfang 2020 stattfinden werden.
Dort soll sie dann detaillierte Mineral- und Landschaftsformations-Daten sammeln, die verwendet werden können, um für eine zukünftige private Nutzung mögliche Ressourcenvorkommen zu bestimmen, die wahrscheinlich auf oder unterhalb der Oberfläche des Planeten vorhanden sind.
Eine im Oktober 2015 auf Kickstarter gestartete Crowdfunding-Kampagne bringt bis Mitte Dezember statt des Finanzierungsziels von 300.000 $ allerdings nur beschämende 82 $ von sechs Unterstützern ein. Weitere Entwicklungsschritte scheint es danach nicht mehr gegeben zu haben.
Zumindest besteht das Unternehmen noch. Ab Februar 2017 bietet
die Firma ihre Openrobotix Labs Services (OLS) an, welche Dienstleistungen
umfassen, die sich auf den Einsatz mobiler Robotertechnologien konzentrieren.
Dazu gehören Drohnen-Luftaufnahmen sowie die Entwicklung von Apps.
Die FLYBi der 2014 von Alex Zepeda und George Munoz gegründeten Firma Advance Robotix Corp. aus Santa Clara in Kalifornien ist erste Drohne, die über ein VR-Headset verfügt, um als Benutzer quasi im Cockpit zu sitzen. Das extrem durchdachte und clevere System will endlich das Versprechen früherer Konzepte wie dem Projekt Oculus Rift FPV der schwedische Firma Intuitive Aerial aus dem Jahr 2013 erfüllen, den Flug tatsächlich aus der first-person-view Perspektive machen zu können.
Die Pressemeldungen, die im September 2015 mit der Crowdfunding-Kampagne für die FLYBi Drohne einhergehen, betonen, daß sie eine Fernbedienung besitzt, die wie eine Uhr oder ein Armband um das Armgelenk geschlungen wird und mit deren Joystick der Quadrokopter gesteuert wird, während ein integriertes 1,8-Zoll-Display das HD-Kamerabild anzeigt.
Die Datenbrille wiederum zeigt nicht nur einfach das Kamerabild, sondern kann darüber hinaus die Bewegungen des Kopfes erfassen und in Steuerungsbefehle an die beweglich gelagerte Kamera umwandeln, ohne daß davon der Flug selbst beeinflußt wird. Außerdem gibt es eine vorderseitige Kamera auf der Brille selbst, so daß man umschalten kann, um zu sehen, was direkt vor einem auf dem Boden ist, ohne das Headset abnehmen zu müssen.
Der im Lieferumfang enthaltene Transportkoffer der FlyBi, der sich als Rucksack tragen oder als Trolley ziehen läßt, eignet sich interessanterweise auch als Lande- und Startplattform. Außerdem verfügt das Helideck über einen höchst innovativen Mechanismus, der die Akkus der Drohne vollautomatisch austauscht, wobei das Reservoire drei Akkus faßt.
Die Drohne selbst ist ein 1 kg schwerer Quadrocopter, der ungefähr die Größe eines MacBook hat, von der Fläche her, über ein Kollisionsvermeidungssystem verfügt, eine Kommunikationsreichweite von 2 km hat und pro Akkuladung eine Flugzeit von 25 – 28 Minuten erreicht. Seine Höchstgeschwindigkeit beträgt 50 km/h.
Das Konzept kommt jedenfalls gut an, und die Crowdfunding-Kampagne auf Indiegogo, bei der das komplette Paket mit Drohne, Datenbrille, Helideck, Armbanduhr-Fernbedienung und zwei zusätzlichen Batterien zu einen Preis ab 1.795 $ angeboten wird, erreicht am Oktober mit 153.834 $ einen Satz von 283 % der erhofften Finanzmittel. Das Unternehmen plant nun, im März 2016 mit dem Versand zu beginnen. Ende des Jahres wird die Drohne je nach Ausstattung jedenfalls zu Preisen zwischen 874 € und 1.490 € angeboten.
Ebenfalls im September 2015 findet in Piombino, Italien,
die euRathlon 2015 statt, der weltweit erste Multidomain/Multiroboter-Wettbewerb
für Such- und Rettungsroboter des NCCR Robotics statt (Luft, Land und
See), dem Schweizer Nationalen Kompetenzzentrum für Robotikforschung.
Ein ausführlicher, im Juni 2016 erschienener Bericht
darüber ist im Netz einsehbar (‚euRathlon 2015: A Multi-domain Multi-robot
Grand Challenge for Search and Rescue Robots‘).
Die zweite Auflage des Wettbewerbs wird im September 2017 ebenfalls in Piombino stattfinden, unter dem Namen ERL Emergency und als Teil der neuen Initiative European Robotics League.

Ein ganz besonderer Drohnen-Zusatz ist die Kralle, für die Ben und Ollie
Kardoosh und ihr Start-Up Mantis Technology Ltd. im
Dezember eine Kickstarter-Kampagne starten.
Angeboten wird ein Trio von verschiedenen Krallen-Designs: das billigste, für 24 £, ist aus Aluminium und wiegt weniger als 20 g; ein aus Edelstahl gefertigtes, 70 g schweres Hardcore-Modell, das perfekt sei, um „2 kg heiße Kohlen aus einem Säurebecken“ heraus zu holen, gibt es für 39 £; und die gleiche, aber mit Silber plattierte Version, kostet 133 £.
Bis Mitte Januar 2016 tragen 319 Unterstützer mit 10.452 £ dazu bei, daß das Projekt verwirklicht werden und die Auslieferung im April beginnen kann.

Im September 2016 wird dann für eine stark verbesserte und effektiver funktionierende Version des Greifers eine weitere Kampagne ins Leben gerufen. Auch die Beschreibung ist diesmal etwas detaillierter.
Beim Mantis Carbon Greifer handelt es sich um einen 3- oder 5-armigen Greifarm, welchen man in Kombination mit einer leistungsstarken Drohne nutzen kann, die ein gewisses Zusatzgewicht tragen kann. Der Greifer wird mit einem starken und dünnen Kevlar-Seil an der Drohne befestigt, worauf man mit dieser herumfliegen und Gegenstände von Punkt A greifen und nach Punkt B fliegen und dort wieder ablassen kann. Die fünf Klauen bewegen sich unabhängig, um Objekte unterschiedlichster Formen aufnehmen zu können.
Das Design erfordert keine Stromversorgung oder Stellglieder und greift durch einen einfachen Mechanismus automatisch zu, wenn es auf ein Objekt gesenkt wird. An den Greifarmen sind farbige Gumminoppen befestigt, welche für mehr Grip beim Greifen sorgen. Der Greifer wiegt ca. 150 g und hat eine Greifkapazität von 28 – 120 mm Durchmesser.
Überraschenderweise klappt es diesmal mit der Finanzierung nicht, denn statt den 10.000 £ Finanzierungsziel kommen von 81 Interessenten nur 4.092 £ zusammen, weshalb das Projekt im November abgebrochen wird.

mit H2Bird
Auch in diesem Jahr gibt es mehrere Kombinationsgeräte, deren Fähigkeiten
über die der reinen Flugapparate hinausgehen.
Im Mai wird beispielsweise von Forschern des Biomimetic Millisystems Lab der University of California, Berkeley, ein kooperatives Startsystem aus der Welt der bio-inspirierten Robotik gezeigt, bei dem der sechsbeinige Roboter-Boden-Crawler VelociRoAC einen leichten Ornithopter H2Bird für einen kurze Zeit auf seinem Rücken trägt, bevor dieser in die Luft aufsteigt.
Die 10 cm lange und 32 g schwere Roboter-Kakerlake hat eine Höchstgeschwindigkeit von 2,7 m/s und ist in der Lage, eine Nutzlast von bis zu 120 g zu tragen. Das 13,2 g wiegende Mikro-Luftfahrzeug wiederum besitzt den Antriebsstrang des ferngesteuerten fliegenden Vogels i-Bird. Seine grob vogelähnliche Form mit einer Flügelspannweite von 26,5 cm besteht aus klarer Plastikfolie, die über einen carbonnfaserverstärkten Rahmen gezogen ist. Für den Start und Flug schlägt es seine vier Flügel und kann mit seinem 90 mAh Akku für ca. 2,5 Minuten in der Luft bleiben.
der ETH
Die Robotiker beabsichtigen nun, die Versuche mit dem Ziel fortzusetzen, den Vogel ohne menschliches Eingreifen zu starten.
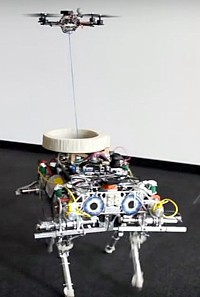
Einem ähnlichen, wenn auch wesentlich aufwendigeren Aufbau folgt der
Roboter-Hund, der eine angebundene Quadrokopter-Drohne trägt, die von
seinem Rücken aus starten kann.
Auf dem im im September 2015 veröffentlichten Video, das dem Autonomous Systems Lab der ETH Zürich entstammt, ist zu sehen, wie der Quadrokopter in die Luft gehen kann, um einen visuellen Überblick zu gewinnen und dann wieder in sein Nest zurückkehrt. Ebenso könnte er eingesetzt werden, um etwas zu holen, das außer Reichweite für den Bodenroboter ist.
Ebenfalls verbunden wird im folgenden Beispiel eine Minidrohne von Parrot mit
einem schwimmenden Tragflügeluntersatz, der selbst keinen eigenen Antrieb
besitzt. Das erstmals im Juni unter dem Namen Hydrofoil vorgestellte
neue Produkt bildet im Grunde ein eigenes Tragflügelboot,
bei dem die Drohne an einer Klappe auf dem Deck befestigt wird.

Die Kombination zwischen einer Drohne und einer Achse mit zwei Rädern hatte Parrot bereits 2014 in Form der Rolling Spider Minidrohne vorgestellt. Der Preis dafür betrug damals 100 $, dem Gerät scheint aufgrund seiner recht bescheidenen Ausstattung aber kein großer Erfolg beschieden zu sein (z.B. fehlte ein An-/Ausschalter). Mit dem ferngesteuerten Tragflügelboot, im Grunde nur eine überarbeitete Version des Rolling Spider, wird nach ferngesteuerten Fahrzeugen und Schiffen technisches Neuland beschritten.
Wie der Name schon sagt, fährt die Hybrid-Minidrohne wie ein Boot durchs Wasser, um sich dann, wenn die entsprechende Geschwindigkeit erreicht ist, etwa 5 – 6 cm in die Luft zu erheben und auf ihren glatten Tragflügelblättern mit bis zu 10 km/h weiter zu sausen, wobei es praktisch unmöglich kentern kann. Vom Untersatz befreit kann die Drohne natürlich auch ganz normal fliegen.
Angeboten werden zwei Modelle zu einem Preis von jeweils 149,00 €: die Version Orak und die Version NewZ, die sich aber nur durch die äußere Textur unterscheiden. Auch eineeingebaute Mini-Kamera besitzen beide. Ende 2016 sind die Hydrofoil Drohnen bei verschiedenen Anbietern zu Preisen von 60 – 85 € erhältlich.
In diesem Zusammenhang mag interessant sein, daß der Flugzeughersteller Boeing bereits
im April hatte das Patent für eine Drohne zugesprochen bekommen, die
sich in ein U-Boot verwandeln kann (US-Nr. 9.010.678,
angemeldet 2013). Es sollte allerdings klar sein, daß
es sich dabei nicht um das Konzept für ein Spielzeug, sondern für eine
Waffe handelt.
Dem Patent zufolge werden die Propeller und Flügel der relativ großen unbemannten Drohne förmlich abgesprengt, wenn diese aufs Wasser trifft, während zur Fortbewegung im und unter Wasser derselbe Antrieb verwendet wird, der sie zuvor in der Luft vorwärts gebracht hat. Boeing hatte bereits im November 2007 einen F-16 Fighter in ein unbemanntes Unterwasserfahrzeug umgebaut.
Ein weiteres Patent, das Boeing im September 2015 zugesprochen wird, betrifft ein Magazin, das anstelle von Patronen Drohnen enthält. Das Drohnenmagazin, das an einem Hubschrauber oder Flugzeug montiert werden kann, welches die Drohnen in die Nähe des Zielbereichs trägt, enthält mehrere Drohnen mit unterschiedlichen Fähigkeiten für wechselnde Missionsziele.
Um die Drohnen aus dem Magazin herauszuziehen, wird ein Roboterarm benutzt, der die Drohne anschließend freigibt. Bei der Rückkehr wird der entgegengesetzte Prozeß verwendet, um die Drohne wieder in dem Magazin unterzubringen (,Aircraft deployment and retrieval of unmanned aerial vehicles’, US-Nr. 9.132.916, angemeldet 2012). Als Erfinder werden Mark Hanna und David R. Poling benannt.
In diese Aufzählung gehört auf jeden Fall – auch wenn er selbst nicht
fliegen kann – der im Dezember 2015 erstmals vorgestellte VertiGo.
Denn es ist eine Propellertechnik, die es dem vierrädrigen Roboter
erlaubt, sich nicht von Wänden aufhalten zu lassen, sondern dieser
einfach hinauf zu fahren. Er erinnert damit ein wenig an den
weiter oben beschriebenen Wandkletter-Roboter des KAIST.
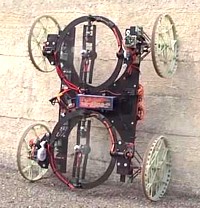
Entwickelt wird der etwa 2 kg schwere VertiGo im Laufe von einem Jahr von dem Maschinenbaustudenten David Krummenacher zusammen mit fünf anderen Studenten der Eidgenössischen Technischen Hochschule (ETH) Zürich im Rahmen einer Bachelorarbeit – und zwar im Auftrag des Entertainmentkonzerns Disney, der in dort ein Forschungslabor betreibt (Disney Research Zürich) und enge Kontakte zur ETH pflegt.
Das Fahrzeug besteht aus einem leichten Carbonfaserrahmen, zwei unabhängig kippbaren Propellern auf dem Rücken und vier 3D-gedruckten Räder aus UV-gehärtetem Photopolymer, von denen die vorderen zwei lenkbar sind. Ohne weitere Hilfsmittel eine senkrechte Wand – auch mit rauhen, unebenen Flächen – zu erklimmen, der Schwerkraft zu trotzen und damit beinahe mühelos jedes Hindernis zu überwinden, gelingt dem Gefährt mit Hilfe der beiden um 360° schwenkbaren Rotoren, die einen derart hohen Anpreßdruck erzeugen, daß der Roboter nicht herunterfällt.
Die Propeller, handelsübliche Modellflugzeug-Plastikrotoren mit einem Durchmesser von 20 cm, werden so ausgerichtet, daß grundsätzlich drei unterschiedliche Kräfte erzeugt werden können: Eine Kraft, die den VertiGo in die gewünschte Fahrtrichtung antreibt; eine Kraft, um den Roboter gegen die Erdanziehung eine Wand hoch fahren zu lassen; und eine Kraft, die einen Anpreßdruck erzeugt und für Traktion an der Wand sorgt. Krummenacher und seine Kommilitonen haben dazu einen speziellen Algorithmus programmiert, der berechnet, wie die Propeller gestellt sein müssen, damit der Wagen nicht abstürzt.
Dank Infrarotsensoren erkennt der Robot, wenn er sich einer Wand nähert. Er hebt dann die Vorderräder an und kommt von allein hoch; ohne die Sensoren bräuchte er eine Rampe. Die beiden Elektromotoren haben eine Maximalleistung von rund 630 W. Gelenkt und beschleunigt wird mit einer normalen Fernsteuerung.
Was Disney mit dem Gefährt genau vorhat, ist noch nicht bekannt, ein kommerzielles Produkt ist laut den Entwicklern aber nicht in Planung. Und serienreif ist der VertiGo sowieso noch nicht. Fest steht allerdings, daß der Roboter noch weiterentwickelt wird, denn mit Propellern kann ja nicht nur gefahren, sondern auch geflogen werden. Einsetzen könnte man ihn zum Beispiel für die Inspektion von schwer zugänglichen Tunnelwänden, Brückenteilen oder Häuserfassaden. Laut Disney sei aber auch denkbar, daß der Roboter als eine Art mobiles Flutlicht an Gebäuden dient oder zu einer Figur modelliert wird, „beispielsweise als Marienkäfer.“
Allerdings wird es mit dieser Technik – wie mit einer Flugdrohne – jedermann möglich, in fremde Wohnungen einzudringen. Das mache sie nicht nur für Spanner, sondern auch für Einbrecher zu einem äußerst nützlichen Hilfsmittel, bemerken die Bedenkenträger. Im Dezember 2017 wird in den Blogs übrigens das Design eines bemannten Geräts namens Ventooz gezeigt, das dem Versuchs-Roboter des KAIST sehr ähnelt (s.d.).

Im Bereich der unkonventionell angetriebenen Quadrokopter sind in diesem
Jahr als erstes ein Hybridmodell mit Benzinantrieb des
deutschen Herstellers Airstier UG & Co. KG aus
Bad Pyrmont zu nennen, das im Mai in den Blogs vorgestellt wird und
nach meinem Kenntnisstand eine Premiere darstellt. Vielleicht deshalb
stellt sich das 3-Mann-Team um Holger Willeke auf
der Homepage auch mit „Schönen guten Tag, we are German engineering
4.0“ vor.
Das stabil wirkende Modell yeair! besitzt einen Hybridantrieb, der aus vier Elektromotoren und vier Zwei-Takt-Verbrennungsmotoren besteht, wie sie aus dem Modellbau bekannt sind. Jeweils ein Elektro- und ein Verbrennungsmotor steuern gemeinsam eine Luftschraube an, wobei der Elektromotor den vergleichsweise trägen Verbrennungsmotor beim Abbremsen und Beschleunigen unterstützt. Die Elektromotor dienen auch zum Anlassen der Zweitakter. Und sollte einer der Motoren an einer Welle ausfallen, kann der jeweils andere Motor einspringen, weshalb die Entwickler auch von einem ,virtuellen Oktokopter’ sprechen.

(Grafik)
Bisherige Ansätze zum Verlängern der Flugzeit mit Hybrid-Technik nutzten fast ausschließlich einen Verbrennungsmotor zur Stromerzeugung an Bord (Range Extender), statt die Energie direkt auf die Luftschrauben zu übertragen, wie im vorliegenden Fall.
Die 10 ccm Zweitakter des yeair! werden von einem 1,5 Liter-Tank mit Treibstoff versorgt. Da die Energiedichte von Flüssigtreibstoffen rund hundertmal größer ist als die von Li-Poly-Akkus, verspricht der Hybrid-Quadrokopter eine Flugzeit von einer Stunde, wobei er bis 5 kg tragen und bis zu 100 km/h schnell fliegen kann. Der Prototyp soll dies bereits stabil und zuverlässig tun.
Über Kickstarter will der Hersteller nun Geld einsammeln, um den Quadrokopter zur Serienreife zu bringen, wobei das Finanzierungsziel bei 70.000 € liegt. Hierfür wird das Fluggerät für einen Preis ab 1.399 € angeboten, ein Flugtraining mit inbegriffen. Tatsächlich können bis Ende der Kampagne sogar 153.268 € von 171 Unterstützer eingenommen werden, womit die voraussichtliche Lieferung im Mai 2016 realistisch wird.
Als langfristige Vision schwebt dem Team allerdings ein Persocopter vor – ein personentragender Kabinen-Multikopter, wie er bei mehreren anderen Unternehmen bereits in Arbeit ist Da bislang aber noch nicht mehr als ein paar nette Grafiken des ersten Entwurfs zu sehen sind, füge ich eine davon hier ein. Mehr über personentragende Elektrofluggeräte findet sich weiter unten.

Eine möglicherweise noch interessantere und Variante bildet der mit Wasserstoff betriebene Hycopter,
der ebenfalls im Mai als weltweite Premiere auf der Association for Unmanned
Vehicle Systems International 2015 in Atlanta, Georgia,
von der Firma Horizon Unmanned Systems (HUS) aus Singapur
präsentiert wird, einem Mitglied der H3 Dynamics Group. Der Hybrid-Antrieb
des Kopters verlängert die Flugzeit extrem – schließlich ist die geringe
Flugzeit, die auf die Batteriespeicher zurückzuführen ist, immer noch
das größte Problem aller existierenden Drohnen.
Anstatt nur eine halbe Stunde, wie es sonst der Durchschnitt ist, erhöht sich die Flugzeit durch den neuen Wasserstoff-Antrieb auf ganze 2,5 Stunden (andere Quellen: 4 Stunden), und dies bei einer Traglast von 1 kg. Einziger Nachteil ist, daß der Wasserstoff nachgefüllt werden muß und die Drohne nicht einfach mittels Stecker geladen werden kann. Das Gewicht der Drohne beträgt 5,2 kg, ihre maximale Nutzlast 1,5 kg.

Das Brennstoffzellen/Li-Poly-Kraftwerk mit ultraleichten Zellen und Zubehör der Schwesterfirma HES energy storage systems (o. energy systems), wird aus einem (nominellen) 3 Liter Tank versorgt. Nominell deshalb, weil die Ingenieure der Firma erkannt hatte, daß die Strukturen von Drohnen im Inneren meist hohl sind und sich anstatt mit Luft auch mit einem nützlichen Gas füllen lassen, dem Wasserstoff. Ein separater Tank ist nicht erforderlich.
In seinem derzeitigen strukturellen Aufbau kann der Hycopter 120 g Wasserstoff bei 350 bar speichern (was die gleiche Menge an Energie liefert wie 3 kg Li-Io-Batterien). Die Rohre sind nachfüllbar und sollen später einmal als Carbonfasern bestehen.
Nun sollen weitere Tests der Wasserstoff-Drohne erfolgen, da die Firma sie so zügig wie möglich auf den Markt bringen möchte. Man hofft, die erste Version dieses Systems, den HYCOPTER-1, Ende 2016 oder Anfang 2017 zum Versand bringen zu können. Ein Preis wird noch nicht genannt, und bislang gibt es auch keine weiteren Neuigkeiten.
Statt dessen vermarktet das inzwischen als HUS Unmanned Systems Pte Ltd. (o. H3 Dynamics) firmierende Unternehmen seit 2015 unter dem Namen DRONEBOX eine portable und Netz-unabhängige Batterie-Lade- und Datenkommunikations-Station für On-Demand-Sensing-Drohnen, die routinemäßige Inspektionen im Feld durchführen. Auch für hochreaktive 24/7-Perimeter- und Grenzsicherheitslösungen ist das System geeignet.

Das High-Tech-Nest für eine Drohne kann irgendwo in die Wildnis gestellt werden. Der Flieger wird von der Dronebox automatisch über eine Solarbatterie-Anlage mit Energie versorgt, erledigt vorprogrammierte Routineaufgaben und vermittelt die Informationen an den Betreiber, selbst wenn dieser Tausende von Kilometern entfernt ist. Aus den Abbildungen ist zu entnehmen, daß die Plattform nach Landung des Quadrokopters in die Box abgesenkt wird, worauf sich die Solarpaneele als Abdeckung darüber schieben.
Bei den Recherchen stellt sich heraus, daß sich Horizon schon seit längerem mit dem Einsatz von Brennstoffzellen bei UAVs beschäftigt. So lassen sich Meldungen vom Dezember 2010 finden, denen zufolge die Firma ihre Aeropak-Zellen auf dem unbemannten militärischen UAV Skylark I-LE der Firma Elbit Systems testet, das bei mehr als 20 Streitkräften weltweit im Einsatz ist.
Die etwa 150.000 $ teure taktische Starrflügel-Drohne hat eine Spannweite von 2 m und wiegt 5,4 kg, kann eine maximale Nutzlast von 1,2 kg tragen und bis auf eine Höhe von 15.000 Fuß operieren. Das System kann durch Schlinge oder von Hand gestartet werden, wird von einem geräuscharmen Elektromotor und Akkus angetrieben, und landet automatisch.
Die Drohne kann mit einer Geschwindigkeit von 40 – 100 km/h fliegen und hat eine Reichweite bis zu 40 km. Das getestete Aeropak-Brennstoffzellensystem, das bei weniger als 2 kg Eigengewicht 600 W Spitzenleistung und netto 900 Wh nutzbare Energie liefern kann, erlaubt es die Missionsausdauer des Skylark 1LE auf drei Stunden zu verdoppeln. Noch höhere Steigerungen können bei einer ebenfalls israelischen IAI Birdeye 650LE Drohne erzielt werden (von drei auf sechs Stunden), sowie bei dem experimentellen südkoreanischen Mini-UAV RemoEye-006 (von zwei auf fünf Stunden). Weitere Informationen darüber sind im Kapitel Wasserstoff und Brennstoffzelle zu finden (Update in Arbeit).

Im November 2016 enthüllt HUS Energy Systems eine neue Starrflügel-Drohne namens Hywings, die ohne nachzutanken bis zu 10 Stunden lang fliegen kann. Angetrieben wird die Brennstoffzelle der 7 kg schweren Kohlefaser-Drohne entweder durch eine Wasserstoff-Chemiepatrone oder einen Zylinder mit komprimiertem Wasserstoff, wobei ersterer nur eine Flugdauer von 6 Stunden bietet.
Gestartet wird von Hand, und einmal in der Luft kann die Hywings eine Reisegeschwindigkeit von 55 km/h erreichen, was einer Reichweite von mehr als 500 km entspricht. Dabei kann die Drohne Winden von bis zu 30 km/h widerstehen. Über eine Telemetrie-System kann sie aus einer Entfernung von 290 km gesteuert werden. Das Flugzeug wurde entwickelt, um mit drei Sensornutzlasten zu arbeiten: einer HD-Videokamera, einer FLIR-Wärmebildkamera und einer Kamera für multispektrale Bilder landwirtschaftlicher Flächen. Wann die Produktionsversion verfügbar sein wird, ist noch nicht bekannt.

Die erwähnte Elbit Systems Ltd., ein israelischer Luft- und Raumfahrt- sowie Elektronikkonzern mit Sitz in Haifa, der 1966 gegründet wurde, war bereits 2004 vom Verteidigungsministerium des Landes beauftragt worden, die Bodentruppen der Israel Defense Forces (IDF) mit seinen Skylark Mini-UAV-Systemen zu versorgen.
Das mit einem sehr leisen Elektromotor ausgestattete Skylark I hat eine Spannweite von 2,4 m bei einer Länge von 2,2 m, wiegt 5,5 kg, fliegt völlig autonom bis zu 1,5 Stunden lang und hat eine Reichweite von 10 km (andere Quellen: 20 – 40 km). Die Drohne kann durch einen einzelnen Soldaten von Hand gestartet werden. Im Jahr 2006 wird das Modell Skylark II mit einer Reichweite von 60 km vorgestellt.

Eines dieser Modelle stürzt im Januar 2007 in der besetzten West Bank in Palästina ab und gelangt in die Hände der Hamas, ebenso wie nochmals im August 2015 geschieht. Im März 2017 meldet das syrische Verteidigungsministerium den Abschuß einer Skylark Drohne am Rande von Quneitra.
In der Entwicklung folgt im Juni 2015 mit dem Skylark I-LEX eine erweiterte Version mit einer Spannweite von 3 m, einem Startgewicht von 7,5 kg und einer Nutzlastkapazität von bis zu 1,2 kg. Das elektrische UAV kann Informationen über einer Sichtlinie von 40 km übertragen, sei bei 100 m Flughöhe auf dem Boden unhörbar und kann bis zu drei Stunden in der Luft bleiben.
Das Modell Skylark 3 wird Februar 2016 vorgestellt, das mit einer Spannweite von 4,8 m, einem maximalen Startgewicht von 45 kg und einer Nutzlastkapazität von bis zu 10 kg schon einer anderen Klasse angehört. Gestartet wird es mit einem pneumatischen Abschußgerät auf dem Boden oder auf einem Fahrzeug montiert. Die Reichweite beträgt mehr als 100 km und die Flugausdauer bis zu 6 Stunden. Zudem können zwei Luftfahrzeuge gleichzeitig von einer gemeinsamen Bodenstation aus gesteuert werden.
Im August zeigt Elbit Systems mit dem Modell Skylark C auch noch eine wasserdichte Version, die einen Fallschirm-basierten Landungsmechanismus besitzt, um sicher auf dem Wasser niederzugehen und dort zu schwimmen.

(Grafik)
Im Dezember 2015 folgt mit den als extrem leicht beschriebenen Wasserstoff-Zellen der
britischen Firma Intelligent Energy Ltd. aus Loughborough
ein weiteres System, welches die Flugeigenschaften von Drohnen deutlich
verbessern soll. Der Prototyp des Brennstoffzellen-Range-Extenders für
Drohnen wird öffentlich erstmals auf der CES im Januar 2016 in
Las Vegas vorgestellt. Der Vorteil der neuen Energielieferanten ist,
daß die Zellen Strom für mehrere Stunden Flugzeit liefern können.

(Prototyp)
Im Vergleich zu herkömmlichen Akkus, die Drohnen eine Flugzeit von 20 – 40 Minuten erlauben und anschließend mindestens 1 – 2 Stunden geladen werden müssen, hält der erste Prototyp des Wasserstoff-Zellen-Verbunds zwar auch nur 20 Minuten, die Ladezeit beträgt hingegen nicht mehr als zwei Minuten. In Zukunft soll die Effizienz aber deutlich gesteigert werden, so daß Flugzeiten von mehreren Stunden erreichbar werden.
Durch die Entwicklungen soll vorrangig der kommerzielle Fortschritt beim Einsatz von Drohnen beschleunigt werden, da Drohnen mit leistungsstarken Wasserstoff-Zellen-Antrieben nicht nur für längere Transportwege eingesetzt werden könnten, sondern z.B. auch bei der Wartung von Offshore-Windanlagen. Über die Preisgestaltung und die Verfügbarkeit ist noch nichts bekannt. Im März 2016 folgt die Meldung, der Prototyp die Wasserstoff-Drohne zwischenzeitlich auch zum ersten Mal abgehoben sei, wobei die Flugzeit über zwei Stunden betragen habe.
Im Januar 2019 meldet die Firma, daß ein neuer Oktokopter mit Koaxialpropellern 70 Minuten lang ununterbrochen in der Luft blieb, während er ein Gewicht von 5 kg trug. Angetrieben wurde die Drohne von 6 Litern mit 300 bar komprimiertem Wasserstoff und einer Brennstoffzelle.
Der Test und der Rekord werden auf Geheiß von Batcam durchgeführt und aufgestellt, einem in Großbritannien ansässigen Unternehmen, das sowohl UAV-Filmaufnahmen als auch Live-Streaming für Sportspiele anbietet. Batcam will in den nächsten zwölf Monaten die kommerziellen Möglichkeiten mit der Wasserstoffantriebstechnologie ausloten. Die Betankung soll durch eine kostengünstige und tragbare Tankstelle von NanoSun erfolgen.

Eine Drohne, die von leichten, Wasserstoff erzeugenden Pellets angetrieben
wird, kann man im Februar 2016 in den Blogs bewundern.
Wasserstoff-Brennstoffzellen sind angemessen für lange Flüge, da sie
viel längere Laufzeiten als Batterien haben. Allerdings muß der Wasserstoff
typischerweise in großen und schweren Druckbehältern gespeichert und
mitgeführt werden.
Mitte des Vormonats ließ die Scottish Association for Marine Science (SAMS) eine Elektro-Strarrflügeldrohne vom Typ Raptor E1 einen erfolgreichen Testflug mit einem einzigartigen, neuen System unternehmen, das leichter ist als die Lithium-Ionen-Batterie, die es ersetzt. Zwar dauert der Flug auf einer Höhe von 80 m nur 10 Minuten, doch die Brennstoffzelle hatte angeblich genug Treibstoff, um für zwei Stunden zu fliegen.
Das Besondere an dem neuen System ist, daß der Brennstoff die Form von etwa 100 kleinen und festen Pellets hat, die in einer drucklosen Patrone enthalten sind. Die von der britischen Firma Cella Energy Ltd. hergestellten und jeweils etwa 1 cm2 großen Pellets bleiben auch bei turbulenten Flügen und Temperaturen bis 50°C stabil, während unter Druck stehender Wasserstoff dagegen bei sehr niedrigen Temperaturen gelagert werden muß.
Die Pellets sind aus einer besonderen chemischen Verbindung zusammengesetzt und produzieren stetig Wasserstoffgas, wenn sie einer geringen Menge an Wärme ausgesetzt werden. Die von der ebenfalls britischen Arcola Energy Ltd. hergestellte Brennstoffzelle wandelt dieses Gas in Elektrizität um, um damit den Motor der Drohne zu versorgen. Hochskaliert soll das kleine Prototyp-System eines Tages sogar Passagierflugzeuge in voller Größe betreiben.

Eine weitere Wasserstoff-betriebene Drohne stellt im April 2016 die
von Lu Zhihui gegründete Firma MicroMultiCopter
Aero Technology Co. Ltd. (MMC) aus Shenzhen, VR China, vor.

Das Hexakopter-Modell HyDrone 1800 kann Dank seiner Wasserstoff-Brennstoffzelle für bis zu 273 Minuten (d.h. fast fünf Stunden, was einen Weltrekord darstellt) in der Luft bleiben.
Dies gibt der Drohne einen Radius von bis zu 100 km – mitsamt Live-Video-Stream. Außerdem arbeitet das staubdichte und feuerfeste Fluggerät auch noch bei Temperaturen unterhalb von -20°C. Daneben werden die vereinfachte Wartung und aktiv gekühlten Motoren hervorgehoben.
Ein kleinerer Vorläufer, das Modell HyDrone 1550, wurde noch als die weltweit erste, kommerziell erhältliche H2-Drohne bezeichnet. Hier wurde eine Flugzeit von bis zu drei Stunden angegeben, die mit dem 3,1 kg schweren und 9 Liter Wasserstoff beinhaltenden Tank erreicht werden kann.
Daneben bietet MMC auch noch konventionelle batteriebetriebene Hexakopter in unterschiedlichen Baugrößen an, die Nutzlasten bis zu 10 kg befördern können.

Im September 2019 stellt MMC auf der InterGEO 2019 in Deutschland eine neue wasserstoffbetriebene, vertikal startende und landende Drohne vor.
Das VTOL Griflion H ist um die firmeneigene Wasserstoff-Brennstoffzelle herum gebaut und soll eine Flugzeit von 15 Stunden ohne Nutzlast oder 10 Stunden mit 3 kg Fracht bieten. Die Drohne hebt mit zwei an jedem Flügel montierten Rotoren ab und bewegt sich dann dank eines weiteren Heck-Rotors vorwärts. Das UAV wurde für Vermessungs-, Kartierungs-, Rettungs-, Sicherheits- und Waldaufklärungsmissionen entwickelt. Weitere Einzelheiten über die neue ‚Hydrone‘ sind zur Zeit nicht verfügbar.

Im September 2018 bringt die chinesische Firma BsharkTech (o.
BSHARK Holding Ltd.), die sich als Experten für wasserstoffbetriebene
Drohnenforschung bezeichnet, eine wasserstoffbetriebene Drohne namens Narwhal
2 auf den Markt, nachdem sie eine Partnerschaft mit der MMC
eingegangen war, die den Produktionsservice zur Verfügung stellt.
Die neue Drohne ist ein 6,6 kg schwerer, aufgerüsteter Wasserstoff-Quadrokopter mit LTE-Modul und einer Reichweite von 30 km sowohl für die Steuerung als auch für die Videoübertragung. Ihr Rahmen aus Aluminium und leichter Kohlefaser ist regen-, staub- und feuerfest und eine metallbasierte PEM-Brennstoffzelle garantiert eine hohe Leistungsdichte. Als Speicher dient ein 3,5 Liter Standard-Typ-4-Wasserstoff-Zylinder aus Kohlefaser und einer Aluminiumlegierung, der mindestens 500 Mal aufgefüllt werden kann.
Der Narwal 2, der bis zu einem Kilogramm tragen kann, ist ab sofort für 6.800 $ erhältlich, nachdem sich die BShark sehr eingesetzt hat, um den Preis für die neue Langstreckendrohne zu senken, deren Vorläufer Narwal 1 noch saftige 28.000 $ gekostet – und daher auch kaum Käufer gefunden hatte.
Ebenfalls im April 2016 meldet die Firma Protonex
Technology Corp. mit Sitz in Southborough, Massachusetts – ein
im Jahr 2000 gegründetes Unternehmen, das Mitte 2015 von
dem kanadischen Brennstoffzellen-Hersteller Ballard
Power Systems übernommen
wurde –, daß sie vor kurzem ihre PEM-Brennstoffzellen an die Firma Insitu
Pacific ausgeliefert habe. Dieses, im Jahr 2009 als
Division der Insitu Inc. in Bingen, Washington, gegründete
Unternehmen erfüllt in erster Linie die Bedürfnisse von Verteidigungs-
und Geschäftskunden in der Region Australien und Asien-Pazifik.
Die seit 2004 als Branchenführer für unbemannte Flugzeugsysteme geltende Firma Insitu Pacific ist im übrigen eine 100 %-ige Tochtergesellschaft der Boeing Co.

Insitu testet nun das Protonex-System in der Hoffnung, im Jahr 2017 eine kommerzielle Version der ScanEagle-Drohne auf den Markt bringen zu können, deren Brennstoffzelle mit mit verflüssigtem Wasserstoff betrieben wird.
Die Boeing-Drohne war ursprünglich 2001 unter dem Namen SeaScan für die Fischwirtschaft entwickelt worden, um aus der Luft Thunfischschwärme zu suchen und zu verfolgen. Der Start erfolgt mittels eines pneumatischen Katapults, für die Rückkehr wird ein SkyHook-Systems oder Netzlandeverfahren genutzt. Der Antrieb basiert allerdings auf einem fossilen 1,4 kW Zweitaktmotor. 2002 folgte dann eine Adaption für militärische Einsätze, die zwei Jahre später in Dienst gestellt wurde.
Der pfeilförmige und 1,55 m lange ScanEagle ist als schwanzloses Flugzeug mit Winglets als Seitenruder ausgelegt. Die Spannweite beträgt 3,11 m, das Leergewicht 13,1 kg und als Nutzlast sind maximal 6,5 kg möglich.
Mit dem Brennstoffzellen/Elektromotor-Antrieb lassen sich zwar nicht die bisherigen Flugzeiten von über 28 Stunden erreichen, sondern nur ca. 8 – 12 Stunden, aber das System bietet dafür andere Vorteile, die besonders bei militärischen Einsätzen interessant sind, wie niedrigere Geräuschpegel und Wärmesignaturen. Zudem vibrieren Brennstoffzellen auch weniger als Verbrennungsmotoren. Flugvorführungen sind für das zweite Halbjahr 2016 geplant.
Die ScanEagle Drohnen werden 2010 zur Überwachung von Meeressäugern eingesetzt, 2013 werden Eisschollen verfolgt, und ab 2014 wird mit den Fluggeräten geholfen, die Landwirtschaft zu entwickeln. Signifikante Erfolge können 2015 vermeldet werden: Nach dem tropischen Wirbelsturm Marcia werden mittels der Drohnen die Notfallmaßnahmen beschleunigt; die Royal Navy setzt sie bei der Beschlagnahme von Betäubungsmitteln ein; die US-Küstenwache nutzt sie während der Operation Arctic Shield bei Such- und Rettungsübungen; und auch bei der Bekämpfung der Waldbrände im Olympic National Park werden sie eingesetzt.
Zudem werden ScanEagle Drohnen ab Oktober 2015 von der BNSF Railway, der zweitgrößten Eisenbahn in den USA, eingesetzt, um die Luftqualität zu überwachen und Inspektionen durchzuführen. Das gemeinsam mit der Federal Aviation Administration (FAA) laufende Pilotprogramm trägt den Namen Pathfinder Program und verwendet die Drohnen, um Gleise, Brücken und andere Infrastrukturelemente der Eisenbahnlinien zu inspizieren.

Die BNSF ist zu diesem Zeitpunkt eines von drei amerikanischen Unternehmen, mit denen die FAA in öffentlich-privater Partnerschaft zusammenarbeitet, um den sicheren Betrieb von Drohnen zu erforschen. Die anderen beiden sind das Nachrichtennetzwerk CNN und die Firma PrecisionHawk.
Im Folgejahr ist die Insitu einer der Hauptsponsoren der UAV Challenge 2016, und im Juni 2017 erhält die Ballard Power Systems über ihre US-Tochter Protonex den ersten Auftrag für das UAV-Brennstoffzellen-Antriebssystem. Auftraggeber ist die 2011 gegründete und 2014 offiziell gestartete Firma FlyH2 Aerospace, ein südafrikanischer Entwickler von Brennstoffzellen-betriebenen UAV für kommerzielle Anwendungen. Der Auftrag umfaßt auch Design-Dienstleistungen, weitere Details werden aus Wettbewerbsgründen jedoch geheim gehalten.
Die FlyH2 plant, das Protonex-System in alle drei Luftfahrzeuge zu integrieren, die das Unternehmen derzeit in der Entwicklung hat. Bei den hochqualitative,n robusten und zuverlässig lang ausdauernden elektrischen UAV handelt es sich um den UA Plant Prototype, die UA Gecko, die zur Beobachtung von Infrastrukturen wie Straßen, Brücken und Stromnetzen eingesetzt wird, sowie das Flaggschiff UA Alpha mit einer Flügelspannweite von 8,2 m, einem Gewicht von etwa 30 kg und einer Flughöhe von bis zu 4,3 km.
Mit einer Flugdauer von etwa 9 Stunden kann die Alpha-Drohne, die in der Landwirtschaft eingesetzt werden soll, eine Distanz von mehr als 600 km zurücklegen, während die eingebauten Sensoren verschiedene Umwelt-Variablen erfassen, die bei der Bekämpfung von Bränden, Luftverschmutzung oder Pflanzenkrankheiten genutzt werden können.

Im September 2017 unterstützt das Rapid Response Team von Insitu übrigens das Rapid Response Team von Insitu die Hilfs- und Rettungsarbeiten während der Waldbrände in der Region Columbia River Gorge, dem Hauptsitz der Firma, sowie wenige Wochen später im Norden Kaliforniens. Im selben Jahr unterstützt das Team auch die Katastrophenhilfe nach dem Hurrikan Harvey. Eine weitere Drohne aus dem Stall der Insitu ist die abgebildete CT110 mit einem Leergewicht von 7 kg und einem maximalen Startgewicht von 15 kg, die eine Flugzeit von bis zu 60 Minuten hat.
Im Dezember 2020 absolviert der ScanEagle3 seinen Erstflug, der von einer wasserstoffbetriebenen PEM-Brennstoffzelle angetrieben wird. Der 30-minütige Flug bestätigt die erhofften Leistungsmerkmale einschließlich der Flugeigenschaften. Dem folgen im Februar 2021 erfolgreiche Tests mit einem speziell für die neue Drohne entwickelten Flüssigwasserstoff-Flugtank (LH2). Der 3D-gedruckte LH2-Tank ist ein Novum in der Branche und soll der Drohne zu einer Flugdauer von mehr als zehn Stunden verhelfen. Der erste Flug mit flüssigem Wasserstoff ist für den Spätsommer geplant.
Und noch eine dritte Wasserstoff-Drohne wird im April 2016 präsentiert.
Der Zeitung Iswestija zufolge stellt ein Oktokopter der russischen
Firma NELK einen Weltrekord im Dauerflug von Multi-Rotor-Koptern
unter freiem Himmel und schwierigen Wetterbedingungen auf, als er drei
Stunden und zehn Minuten ununterbrochen in der Luft bleibt. Die 12 kg
schwere hat eine Antriebsleistung von 1,3 kW und kann eine Nutzlast von 0,5
kg tragen.
Die eingesetzten Wasserstoff/Luft-Brennstoffzellen der NELK-Drohne sind vom Zentrum für chemische Physik der Russischen Akademie der Wissenschaften entwickelt worden, weitere Details sind bislang nicht zu finden. Dafür etwas über einen anderen Rekord.

Der Quadrokopter H2Quad 400 der 2002 gegründeten
kanadischen Firma EnergyOr Technologies Inc. aus Montreal,
die leichte und kompakte PEM-Brennstoffzellensysteme für spezielle Nischenmärkte
entwickelt, hatte übrigens 2014 einen Flugrekord von
3 Stunden 43 Minuten und 48 Sekunden aufgestellt — allerdings in einem
geschlossenen Hangar.
Dieses Unternehmen behauptet auch, im Mai 2007 die erste Firma gewesen zu sein, die in Kanada ein Brennstoffzellen-angetriebenes UAVs betrieben hätte. Inzwischen bietet EnergyOr verschiedene Quadrokopter sowie Starrflügler wie den FAUCON H2 und den TRON H2 an, die alle ihren Strom aus Brennstoffzellen beziehen. Das erstgenannte Modell mit einer Spannweite von 3,3 m, einem Gewicht von 10 kg und einer Nutzlast von 1 kg soll eine Geschwindigkeit von bis zu 100 km/h und Flugzeiten bis zu 10 Stunden erreichen.
Zeitlich nicht zuordnen konnte ich bislang eine Brennstoffzellen-betriebene
Drohne aus Südkorea, die unter dem Namen Giantdrone bekannt
wird. Die Fotos erscheinen jedenfalls im Oktober 2016,
Informationen über den ersten Flugtest im November.
Zurück zur Chronologie: Um Kollisionen zu vermeiden, sollen größere Drohnen
mit einem Sonar-System nachgerüstet werden. Die Innovation
stammt von der im Jahr 2014 als Spin-off der Firma
Aurora Flight Sciences gegründeten Panoptes Systems Corp. von Ross
Allen und Marco Pavone, und basiert auf vier
Sonar-Sensoren, die nach vorne, nach oben, links und rechts gerichtet
sind.
Die Fähigkeiten der Drohne entspringen einer Form des maschinellem Lernens. Sie ist mit Motion-Capture-Sensoren ausgestattet, die Echtzeit-Daten der Umgebung aufnehmen, die von speziell entwickelten Algorithmen verarbeitet werden, welche bestimmen, ob eine Veränderung in der Umgebung eine Bedrohung für das Fluggerät darstellt. Falls ja, dann legen die Algorithmen passende Ausweichmanöver fest und lassen die Drohne diese ausführen.
Damit das Fluggerät noch schneller und effektiver reagiert, soll es in Zukunft mit einem ganzen Arsenal an Laser-, Ultraschall- und visuellen Sensoren ausgestattet werden. Die Forscher gehen davon aus,, daß ihre Technik in Zukunft in selbstfahrenden Autos, Raumschiffen, Robotern und militärischen Drohnen zum Einsatz kommt.
Um den bis zu 130 g schweren eBumper4, der für Erstbesteller 359 $ kosten soll, in die Produktion zu überführen, startet das Spin-off im März eine Kickstarter-Kampagne, bei der 80.000 $ zusammenkommen sollen. Die Resonanz bleibt bescheiden, und als bis zum April nur 28.885 $ eingehen, gilt die Finanzierung als erfolglos und das Projekt wird eingestellt.

Ein weiteres im April 2015 auf Kickstarter vorgestelltes
Projekt namens Ares will die Steuerung von
Drohnen über das Smartphone oder Tablet auf eine sehr einfache Art ermöglichen.
Alleine durch zeichnen der Flugroute auf einer Karte wird die Route vorgegeben,
die an den Kopter gesendet wird. Zusätzlich kann auch die Kameraausrichtung
im Voraus bestimmt werden. Das Flugprogramm wird dann automatisch abgearbeitet.
Ein Prototyp existiert bereits bei der verantwortlichen, 2014 gegründeten, Firma Airnest aus State College, Pennsylvania, und die GoPro-Version der nicht näher beschriebenen Drohne wird auf für Kickstarter einen Preis ab 699 $ angeboten – um für die Entwicklung 50.000 $ zusammen zu bekommen. Tatsächlich tragen 105 Unterstützer mit sogar 62.387 $ dazu bei, dieses Projekt zu verwirklichen.
(Hinweis zur Vermeidung von Verwechseleungen: Unter dem Namen Ares läuft auch die 2014 durch die DARPA in Auftrag gegebene Entwicklung eines unbemannten, fossil betriebenen Senkrechtstarters für das Militär).

mit Abwurfkanistern
Speziell für den militärischen Einsatz gedacht ist das Low-Cost
UAV Swarming Technology (Locust) System, das die U.S. Navy Presseberichten
von April 2015 zufolge neu erhalten hat. Dabei handelt
es sich um eine mobile Abschußrampe, die zwar einer Raketenbodenstation
ähnelt, aber statt Raketen in Röhren gepackte Drohnen mit eingeklappten
Flügeln abfeuert. Sobald abgeschossen, trennen sie sich von den Röhren,
klappen Flügel und Leitwerk aus und verwandeln sich in elektrisch angetriebene,
fliegende Roboter.
Dank diesem Startmechanismus lassen sich ganze Drohnenschwärme binnen Sekunden in die Luft katapultieren.
Bei den Drohnen selbst handelt es sich um das Modell Coyote der 1989 gegründeten Firma Advanced Ceramics Research Inc. (ACR) aus Tucson, dessen Entwicklung durch das Office of Naval Research (ONR) gefördert wurde. Das 1 m lange UAV wird ursprünglich entworfen, um von dem Standardgrößen-Sonobojen-Rohr eines Hubschraubers oder maritimen Patrouillenflugzeugs aus gestartet zu werden.
Die Drohnen wiegen ca. 5 kg, können eine Nutzlast von 0,5 kg tragen und bis zu 90 Minuten lang mit einer Fluggeschwindigkeit von 110 km/h unterwegs sein, während die Höchstgeschwindigkeit 145 km/h beträgt. Mit einem 2 W Sender können sie Vollbewegungsvideos bis zu 37 km weit übertragen. Die maximale Operationshöhe beträgt 20.000 Fuß, die Landung erfolgt autonom.
Mitte September 2014 waren vier Coyote-Drohnen direkt in das Auge des Hurrikan Edouard über dem Atlantik geflogen. Dabei handelte es sich den ersten entsprechenden unbemannten Testflug der National Oceanic and Atmospheric Administration (NOAA) überhaupt, der das Ziel hatte, wichtige Informationen zu sammeln, um die Hurrikanprognose zu verbessern. Die Drohnen übertrugen Temperatur-, Luftdruck-, Feuchtigkeits- sowie Windgeschwindigkeits- und -richtungsdaten aus der Nähe der Ozeanoberfläche, wo das warme Wasser den Orkan antreibt.

im Flug
ACR produziert drei verschiedene UAV-Plattformen: neben einem benzinbetriebenen Modell Manta sind dies eine kleine, benzin-elektrische Hybriddrohne Silver Fox mit bis zu 10 Stunden Flugzeit, sowie die hier beschriebene rein elektrische Coyote. Im Juni 2009 wird die Firma übrigens für 14,7 Mio. $ von dem britisch-multinationalen Rüstungs- und Luftfahrtkonzern BAE Systems aufgekauft. 2014 erwirbt Matt Pobloske, eine ehemalige ACR-Führungskraft, die auch zur BAE gewechselt war, den Geschäftsbereich von BAE und nennt ihn Sensintel Inc.
Bereits im Januar 2015 wird die Sensintel dann zu einem nicht bekannten Preis von dem Verteidigungstechnologie-Unternehmen Raytheon Co. übernommen.
ACR produziert insgesamt drei UAV-Plattformen: neben einem benzinbetriebenen Modell Manta sind dies eine kleine benzin-elektrische Hybriddrohne Silver Fox mit bis zu 10 Stunden Flugzeit sowie die hier beschriebene rein elektrische Coyote. Im Juni 2009 wird die Firma übrigens für 14,7 Mio. $ von dem britisch-multinationalen Rüstungs- und Luftfahrtkonzern BAE Systems gekauft.
Im Mai 2016 veröffentlicht das ONR ein Video mit dem Start- und Flugversuch eines aus 30 Drohnen bestehenden Schwarms, der im Rahmen des Locust-Projekts gemeinsam mit dem Georgia Institute of Technology durchgeführt wird – allerdings mit einem anderen, vom Boden aus startenden Drohnenmodell, das demjenigen ähnelt, das Google für Lieferungen benutzen will (s.u. Projekt Wing). Die Landungen erfolgen übrigens in ein aufgespannten Netzes.
Die Idee dahinter ist, daß die Zukunft des Luftkriegs nicht von Predator- oder Neuron-Drohnen bestimmt wird, sondern von Schwärmen einfacher und weniger teurer Ausführungen, die untereinander kooperieren, um ihre gemeinsame Mission durchzuführen.
(Grafik)
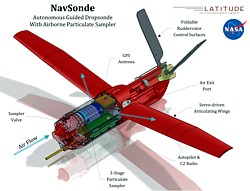
Nach einem ähnlichen Prinzip wie bei der Coyote Drohne erfolgt auch der
Einsatz der NavSonde, die von der Firma Latitude
Engineering LLC hergestellt wird. Die autonome und antriebslose
Wurfsonde (o. Dropsonde, eine Einweg-Wetteraufklärungsvorrichtung)
fällt aus einem Zylinder aus einem Flugzeug, entfaltet Servo-betrieben
Flügel und Leitwerk und kann dann z.B. durch vulkanische Aschewolken
gleiten, was sich für motorisierte Flugzeugen verheerend auswirken
würde, um Proben zu nehmen und wissenschaftliche Daten zu sammeln.
Das Unternehmen hatte im Auftrag der NASA im Jahr 2011 damit begonnen, eine fortschrittliche, lenkbare Dropsonde für wissenschaftluche Zwecke zu entwickeln. 2013 folgte ein In-Situ Probennehmer für die Advanced Guided Dropsonde, und 2014 beginnen die Arbeiten, um dieses Konzept zum NavSonde Atmospheric Sampler weiterzuentwickeln. Bei diesem öffnet und schließt sich der Aschesammler an genaue definierten Punkten, so daß die Forscher wissen, wo jede Probe entstand, um nach der Landung Dichte und Asche-Typ analysieren zu können und zu entscheiden, wo es sicher ist zu fliegen.
Ebenso kann die NavSonde alle Arten problematischer Luftpartikel einsammeln, von Staubstürmen über Verschmutzungen bis hin zum Rauch brennender Wälder, ohne daß bemannte Flugzeuge der Feuerlinie nahe kommen müssen.
Im Mai 2015 stellt Prof. Martinez Carranza vom National
Institute of Astrophysics, Optics and Electronics (INAOE) in
Mexiko ein neu entwickeltes Drohnen-Navigationssystem vor,
das ausschließlich auf visuellen Beobachtungen basiert.
Zwar werden die bald erwarteten autonomen Lieferdrohnen wahrscheinlich
alle GPS nutzen, um zu navigieren, doch die GPS-Satelliten sind nicht
immer verfügbar.
Carranza hatte die Technik, die nicht nur zuverlässiger sei als GPS, sondern deren benötigte Hardware (Kameras, Beschleunigungsmesser und Gyroskope) auch einfacher und kostengünstiger ist als ein GPS-System, während seines Postdoc-Studiums an der University of Bristol entwickelt, als Teil des RAFAGA-Programms (Robust Autonomous Flight of unmanned aerial vehicles in GPS-denied outdoor areas).
Die Benutzer des Systems beginnen mit einem Google Maps-ähnlichen Satellitenbild des Bereichs, den die Drohne durchqueren soll, und zeichnen auf dieser Karte den gewünschten Flugweg. Während die üblichen Drohnen den entsprechenden GPS-Wegpunkten folgen, verwendet eine RAFAGA-fähige Drohne ihre Onboard-Kamera, um Gebäude oder andere Merkmale am Boden zu identifizieren und sie mit den Luftbildern der Satellitenkarte abzustimmen.
Ebenfalls im Mai 2015 präsentiert die dänische Firma Sky-Watch
A/S mit Sitz in Stoevring auf der Drohnenkonferenz Nordic UAS
Event den Prototyp einer neuen Hybrid-Drohne namens MUNINN VX1 vor,
die unter der Leitung des DTU Space DroneCenter der
Technischen Universtität in Kongens Lyngby, innerhalb von 14 Monaten
entwickelt worden ist. Weitere Partner sind die Danish National Advanced
Technology Foundation und Boeing.
Mit ihrem einzigartigen Design mit zwei Rotoren im Rumpf und zwei beweglichen Rotoren an den Flügelspitzen kann sie ebenso als traditioneller Multirotor/Helikopter mit vertikaler Start- und Landefähigkeit, wie auch als Starrflügler fliegen, bei dem der gesamte Auftrieb von den Flügeln ausgeht. Dies verleiht der Drohne den Vorteil, beim Fotografieren oder Durchführen von Messungen Langstreckenflug und Schweben kombinieren zu zu können – und eine große Reichweite bei relativ hoher Geschwindigkeit zu erreichen.
Dank der DTU verfügt die Drohne auch über ein spezielles Präzisions-GPS, das es ermöglicht, mit einer Genauigkeit von bis zu 5 cm zu manövrieren, das mit gewöhnlichen Drohnen kaum oder gar nicht möglich ist. Die Danish National Advanced Technology Foundation investiert 7 Mio. DKK in das dreijährige Projekt, bei dem sich Sky-Watch auf Benutzerfreundlichkeit und fortschrittliche Sensor-Technologien konzentriert, und das 2017 abgeschlossen werden soll.

im Rucksack
Die seit 2009 bestehende Sky-Watch entwickelt, produziert und implementiert insbesondere UAVs, die in sehr schwierigen Umgebungen eingesetzt werden können. Das Unternehmen ist im Besitz des dänischen Aktienfonds Danangroup ApS als Mehrheitsgesellschafter sowie der Borean Innovation A/S, einem Teil des dänischen Forschungsministeriums, der in lokale Technologieunternehmen investiert.
Zu den früheren Modellen der Firma gehört der für Verteidigung und Strafverfolgung entwickelte Huginn X1, ein robuster und wasserfester Quadrokopter, der in weniger als 120 Sekunden vom Rucksack in die Luft gebracht werden kann. Mit einem Gewicht von 1,39 kg ohne Nutzlast erreicht er pro Batterieladung eine Flugzeit von 25 Minuten und eine Geschwindigkeit von 21,6 km/h. Die verschlüsselte Kommunikation besitzt eine Reichweite von 2 km.
Heidrun V1 ist eine tragbare, leichte und hochautonome Starrflügel-Drohne aus Kohlefaser, die bis zu 600 g Nutzlast aufnehmen kann. Mit 1,7 kg (ohne Nutzlast) und 2 Stunden Flugzeit hat der Flieger eine Reichweite von 25 km. Wie Hugin besitzt auch Heidrum ein Live-Video-Feed nebst Wärmebildkamera.
Eine weitere hochgradig autonome Starrflügler-Drohne für die landwirtschaftliche Erkundung, Kartierung und Vermessung ist das extrem einfach zu bedienende Modell Cumulus, das ebenfalls bis zu 600 g Nutzlast trägt, dabei jedoch eine Höchstgeschwindigkeit 108 km/h und eine Flugzeit von 2:30 Stunden erreichen kann.

Mitte Juli 2015 bricht der 6,8 kg schwere Solarflieger AtlantikSolar
2 (AS-2) der ETH Zürich auf einem Flugplatz
der schweizerischen Gemeinde Rafz den Weltrekord für UAVs unter 50
kg, indem er ununterbrochen 81,5 Stunden (4 Tage und 3 Nächte) in der
Luft bleibt und dabei eine Strecke von 2.316 km zurücklegt. Es ist
der bisher längste Flug eines vollständig mit Solarenergie betriebenen
unbemannten Langstrecken-Fliegers (low-altitude long-endurance, LALE)
in niedriger Höhe.
Abgesehen vom Startvorgang manövriert die Drohne zu 98 % der Flugzeit im voll autonomen Flugmodus. Bei den verbleibenden 2 % wird sie durch einen Pixhawk-Autopiloten unterstützend gesteuert. Besonders bemerkenswert: Die Drohne landet mit vollständig aufgeladenem Akku. Dies erklärt sich dadurch, daß der durchschnittliche Energieverbrauch bei ruhigen Bedingungen (etwa während der Nacht) nur 35 – 46 W beträgt, während die maximale Leistungsaufnahme mit den Solar-Zellen von SunPower pro Tag bei etwa 260 W liegt.

auf Grönland
Das Folgemodell AtlantikSolar 3 (AS-3) absolviert übrigens im Juli 2016 einen 26-stündigen solarbetriebenen Such- und Rettungsflug. Dieser kombiniert weltweit erstmals einen Dauerflug mit der vollen Autonomie des Flugzeugs, welches eine 300 g schwere Nutzlast trägt (1 Farbkamera, 1 Wärmebildkamera, 1 ODROID Bordcomputer mit WLAN, Gesamtverbrauch 10 W) und zudem eine automatische thermische Aufwindverfolgung durchführt, um die Energieeffizienz zu erhöhen und das Wiederaufladen der Batterie zu beschleunigen.
Im Mai 2017 erscheint ein 36-seitiger Forschungsbericht des Autonomous Systems Lab der ETH über den Weltrekord von 2015, der auch im Netz abrufbar ist (‚Design of small hand-launched solar-powered UAVs: From concept study to a multi-day world endurance record flight‘). Und im Juni erfolgt in Qaanaaq auf Nordwestgrönland ein 13-stündiger Dauerflug unter den harschen klimatischen Verhältnissen der Arktis, der als der „erste solarbetriebene Flug in der Arktis“ beschrieben wird.
Anfang Juli fliegt die bis zu 6 m/s schnelle AtlantikSolar unter der Leitung des Glaziologen-Teams in ein Forschungsgebiet und startet einen photogrammetrischen Scan. Sie trotzt vertikalen Böen bis zu 6 m/s, nutzt einen anhaltenden Rückenwind von 15 m/s, fliegt in fünf Stunden 230 km und landet noch immer fast voll aufgeladen.
Die Idee hinter dem Projekt Sund2Ice: Für die Glaziologen der ETH bieten die kontinuierlichen Tageslichtbedingungen im Arktischen Sommer potentiell ideale Bedingungen für ein solarbetriebenes Flugzeug, was die Flugzeit von Vermessungsdrohnen drastisch verlängern würde.
Auf großes Interesse stößt das im Juli vorgestellte Konzept einer intelligenten
Drohnen-Technologie zum Auffinden von Parkplätzen,
die der Student Amir Ehsani Zonouz von der University
of Massachusetts Dartmouth entwickelt hat – wofür er auch
zum Sieger des ersten Ideenwettbewerbs Mobility IDEA Contest von Siemens
gekürt wird, den das Unternehmen 2014 in den USA ausgerufen
hat, und zu dem 385 Teilnehmer Ideen eingereicht hatten.
Zonouz schlägt vor, Quadkopter einzusetzen, um schnell unbelegte Parkplätze sowie den kürzesten Weg zur nächsten freien Lücke zu finden. Über eine mobile App oder direkt über das Kommunikationssystem seines Fahrzeugs wird der Fahrer dann schnurstracks zur Parkmöglichkeit gelotst. Die Technologie bietet zudem die Möglichkeit, die Drohnen während nächtlicher Flüge durch Wärmekameras zu unterstützen.
Außerdem ließen sich auch Fahrzeuge mit Behindertenparkausweis aus der Luft erkennen und zu entsprechend gekennzeichneten Parkbuchten leiten, ebenso könnten die UAVs die Parkflächen überwachen und auf verdächtige Aktivitäten aufmerksam machen.

der U.S. Navy
Ebenfalls im Juli berichten die Fachblogs darüber, daß das US-Militär,
das Drohnen bereits zur Feindbeobachtung, Erkundung, Sammlung von Daten
und als Waffe bzw. Waffenträger einsetzt, ein Problem mit der Vielzahl
an verschiedenen Drohnen mit unterschiedlichen Spezifikationen hat,
die vorrätig gehalten werden müssen – was in einem Kriegsgebiet aus
logistischer Sicht nicht gerade optimal ist.
Die U.S. Navy testet daher die Verwendung von 3D-Druckern auf ihren Schiffen, um benutzerdefinierte Drohnen zu produzieren, die für spezialisierte Missionen ausgerüstet sind. Das Projekt, das von Forschern an der Naval Postgraduate School durchgeführt wird, untersucht, ob moderne Kommunikations- und Fertigungstechnologien kombiniert werden können, um den Seeleuten ein neues Werkzeug zu bieten.
Bereits im April des letzten Jahres war zu diesem Zweck an Bord der USS Essex ein 3D-Drucker installiert worden, mit dem im Dezember eine Quadrokopter-Drohne gedruckt wird, deren Design-Datei per eMail über einen Satelliten-Link an das Schiff übermittelt wurde. Zusammen mit der Elektronik, die bereits an Bord ist (Motoren, Radio, Controller und ein GPS-Gerät) werden die Kunststoffteile anschließend zu einer voll funktionsfähigen Drohne montiert.
Im Dezember ist übrigens zu erfahren, daß 3D-Drucker bereits auf dem alten US-Flugzeugträger USS Harry Truman zum Einsatz kommen, um Ersatzteile wie verloren gegangene Staubschutzkappen, fehlende Verbindungsstück oder besondere Schraubschlüssel zu produzieren. Drohnen werden hier noch keine hergestellt.

von Aurora
An dieser Stelle soll auch auf einen aktuellen Meilenstein im Bereich
der 3D-Drucktechnologie verwiesen werden – obwohl die dabei hergestellte
Drohne mit einem fossilen Jet-Antrieb fliegt. Einer Meldung vom November
zufolge stellt die o.g. Aurora Flight Sciences zusammen
mit der Stratasys Ltd. (s.u. Smart Wing 2012)
auf der Dubai Airshow die weltweit erste Drohne aus einem 3D-Drucker
vor, die einen ebenfalls gedruckten, voll funktionsfähigen Jet-Antrieb
besitzt.
Über 80 % der Drohne wurden mit dem Schmelzschichtungs-Verfahren (Fused Deposition Modeling, FDM) hergestellt. Der Flugzeugrumpf ist aus Nylon gefertigt, während bei der Turbine selbstverständlich hitzebeständiges Metall zum Einsatz kommt. Die Flügelspanne beträgt 3 m, das Gewicht mitsamt Turbinen-Antrieb 15 kg, und die Fluggeschwindigkeit bis zu 240 km/h. Aurora hat die Jet-Drohne gemeinsam mit Stratasys realisiert um zu zeigen, wie weit die 3D-Druck-Technologie bereits vorangeschritten ist.
Im August 2015 meldet Presse, daß die DARPA kleine
Drohnen entwickeln läßt, die von ,Mutterschiffen’ aus starten und nach
abgeschlossener Mission wieder zu diesen zurückkehren. Das Projekt mit
dem Namen Gremlins fordert eine neue Art von wiederverwendbaren
UVAs, die als Flotten von Frachtflugzeugen, Bombern oder anderen Militärflugzeugen
für Aufklärungsmissionen über feindlichem Luftraum abgeworfen und bis
zu drei Stunden später durch ein C-130 Frachtflugzeug wieder eingesammelt
werden.

(Grafik)
Nachdem im vergangenen Herbst ein Aufruf zur Einreichung von Vorschlägen ergangen war, veröffentlicht das Pentagon nun die Namen der vier Unternehmen, die für die Weiterentwicklung der Idee ausgewählt wurden: Composite Engineering, Dynetics, General Atomics Aeronautic Systems und Lockheed Martin.
Bislang gibt es noch keine UAVs, die von anderen Flugzeugen eingesetzt und aufgesammelt werden. Neben dem erheblichen Vorteil, daß die Drohnen keine wertvolle Flugzeit verlieren, um das Zielgebiet zu erreichen, lassen sie sich so auch eher wiederverwenden. Geplant sind 20 Wiederverwendungen während der Lebensdauer der Gremlins, deren Einzelpreis auf rund 700.000 $ geschätzt wird.
Operieren sollen die Drohnen in Schwärmen, um den Erfolg der Mission sicherzustellen, auch wenn mehrere der Drohnen abstürzen oder abgeschossen werden. Im Schwarm kommunizieren sie miteinander, um ihre Arbeit zu koordinieren und Daten über Satellit zurück zur Basis zu übertragen.
Die vier Unternehmen werden ihre Vorschläge im Laufe des nächsten Jahres ausarbeiten, anschließend will die DARPA jene zwei benennen, die ihre Bemühungen weiterführen können. Der endgültige Sieger soll dann bis 2020 ausgewählt werden.
Im November wird berichtet, daß ein eigenes Frequenzband für
Drohnen vorerst abgelehnt worden sei. Bei der Wellenkonferenz 2015 (World
Radiocommunication Conference, WRC) in Genf, in deren Rahmen die 193
Mitgliedsstaaten der International Telecommunication Union (ITU) innerhalb
von vierwöchigen Verhandlungen mehr Frequenzen für den Mobilfunk und
eine fast globale Harmonisierung dafür im begehrten 700-MHz-Band vereinbaren,
wird ein US-Vorschlag zur Zuweisung spezieller Frequenzen für Drohnen
nach reichlich Widerstand zurückgewiesen.
Der Vorschlag scheitert nicht zuletzt an technischen Bedenken, da die von der amerikanischen Behörde CITEL vorgeschlagenen Frequenzbänder 10,95 – 14,5 GHz und17,3 – 30 GHz aktuell insbesondere von Satellitendiensten genutzt werden. Drohnen, die in einem dieser Bereiche Daten übertragen, könnten die Dienste in den überflogenen Regionen im schlimmsten Fall einfach lahmlegen. Jetzt soll daher für mehrere Jahre untersucht werden, ob und wie sich Interferenzen vermeiden lassen.

Ebenfalls im November 2015 wird in den Blogs eine kleine Solardrohne der
Firma ToyLabs aus dem kalifornischen San Carlos vorgestellt,
die vor ein paar Jahren mit dem Volta Racer ein solarbetriebenes elektrisches
Spielzeugauto auf den Markt gebracht hatte, das Kinder die Nutzung der
Sonnenenergie näher bringen sollte.
Der neue Volta Flyer tut dasselbe, außer daß es in der Lage ist, in den Himmel zu steigen, nachdem er für nur 90 Sekunden Sonnenstrahlen aufgenommen hat. Der in 20 Minuten und sehr einfach zusammensetzbare Bausatz bietet ein Flügeldesign, das bei einem Crash oder einer Kollision abbricht – sowie Ersatzflügel, da das Unvermeidliche zweifellos passieren wird.
Daß das Fluggerät an einem sonnigen Tag einfach bis zur Dämmerung weiterfliegt und auf einem geraden Kurs auf Nimmerwiedersehen verschwindet, ist allerdings nicht zu befürchten. Der Volta Flyer wird nämlich nur aufgeladen, wenn der Propeller ausgeschaltet ist. Nach 90 Sekunden in der Sonne kann er dann eingeschaltet werden, worauf sich der Propeller für 10 – 15 Sekunden dreht und den Flieger für ca. 30 Sekunden in der Luft hält, bevor sich die Onboard-Superkondensatoren wieder entleert haben.
Um den Volta Flyer in Produktion nehmen zu können, hatte ToyLabs bereits im März eine Kickstarter-Kampagne mit einem Finanzierungsziel von 39.000 $ startet, bei der das Solarspielzeug für 40 $ angeboten wird. Davon ließen sich 374 Unterstützer überzeugen, die gemeinsam 42.652 $ aufbrachen, um das Projekt zu verwirklichen. Die Auslieferung soll nun im Dezember erfolgen.
Eine dritte Meldung im November 2015 stammt aus dem
Computer Science and Artificial Intelligence Laboratory (CSAIL) des MIT in
Boston, wo Prof. Russ Tedrake und sein Doktorand Andrew
J. Barry einer Nurflügler-Drohne vom Typ TBS Caipirinha zwei
8-Bit-Graustufen-Kameras auf die beiden Tragflächen montieren und den
Flieger dadurch mit Stereosicht ausstatten.
Eine selbst entwickelte Software für die Bildverarbeitung, die mittlerweile auf GitHub frei veröffentlicht wurde, analysiert die Videobilder in Echtzeit und erlaubt dem autonom fliegenden Prototypen spielend einen kollisionsfreien Weg durch Bäume zu finden, deren Äste plötzlich vor seinen Kameraaugen erscheinen – und dies bei einer Geschwindigkeit von 50 km/h.
Im Rahmen der Chronologie sind noch zwei Hinweise auf periphere
Entwicklungen passend, da diese möglicherweise signifikante
Einflüsse auf die Weiterentwicklung der solar-elektrischen Fluggeräte
haben werden.

So berichten im August 2015 der Forscher Martin
Kaltenbrunner und seine Kollegen an der Johannes Kepler
Universität Linz (JKU), daß sie eine ultradünne, flexible, dehnbare
und leichte Solarfolie produziert haben, um die Einsatzfähigkeit des
Materials bei solarbetriebenen Miniaturflugzeugen und Blimps zu demonstrieren.
Die JKU-Wissenschaftler hatten bereits im Jahr 2012 zusammen mit Partnern an der Universität Tokio extrem dünne und dennoch leistungsfähige organische Zellen entwickelt, bei denen die aktiven, energieerzeugenden Elemente 1/3 der Zelle ausmachen, während das darunterliegende Substrat, vorwiegend Plastikfolie, nur noch 2/3 der Zelle in Anspruch nimmt. Bei herkömmlichen Solarzellen dieser Bauart machte das Substrat bisher noch mehr als 99 % der Zelle aus. Die Zellen erzeugen 10 W/g, was zum damaligen Zeitpunkt einen Weltrekord darstellt.
Die neue Entwicklung ist eine nur 3 µm dünnen Solarzelle aus kristallinem Perowskit, wobei eine Trägerschicht aus einem leitfähigen Polymer die Rolle der positiven Elektrode übernimmt. Die Forscher komplettierten die Solarzelle mit einer leitfähigen Zwischenschicht und einer Metallelektrode aus Gold oder günstigerem Kupfer.
Damit das Metall nicht mit der leitenden Zwischenschicht reagiert, wird Chrom hinzugefügt, bei dessen teilweiser Verdunstung Chromoxid entsteht, welches das Metall vor Korrosion schützt und gleichzeitig einen stabil hohen Wirkungsgrad der Solarzelle ermöglicht. Bislang gelingt es der Zwischenschicht allerdings nur, die Effizienz der Zellen für etwa zwei Tage zu bewahren, so daß hier noch weitere Forschungsarbeit nötig ist.
Messungen belegen einen Wirkungsgrad von etwa 12 %, was einem in der Photovoltaik bisher unerreichten Verhältnis von 23 W/g Solarmodul entspricht. Und sogar die effizientesten Düsenantriebe schaffen es nach Angaben der Forscher maximal auf 10 W/g. Kaltenbrunners Team läßt bereits Testflugzeuge und kleine Luftschiffe fliegen, die mit den neuen Zellen ausgestattet sind.
Eine weitere Technologie, die eventuell bei Drohnen zum Einsatz kommen
wird, stellen Forscher der University of California-San Diego (UCSD)
um L. Y. Hsu im September 2015 vor:
wie man sie nämlich unsichtbar macht. Während man
eine Drohne natürlich nicht buchstäblich unsichtbar machen
kann, ist es aber möglich, sie in etwas einzuhüllen, das seine Umgebung
reflektiert – wie ein flüssiger Spiegel – und damit eine ähnliche Wirkung
zu erzielen.
Es ist nicht das erste Mal, daß Wissenschaftler an Geräten arbeiten, die ein gewisses Maß an Unsichtbarkeit verleihen – das militärische Potential ist schließlich enorm – aber alle bisherigen Entwürfe waren sperriger als das Objekt selbst, was dem Zweck zuwiderläuft und die Technik für fliegende Objekte kaum anwendbar macht.
Die neue Unsichtbarkeits-Vorrichtung der UCSD-Forscher ist hingegen ein unglaublich dünnes Teflon-Blatt, das mit kleinen Kreisen aus hochreflektierender Keramik besetzt ist. Das Design ist nicht nur dünner als alle anderen Entwürfe, es absorbiert auch weniger Licht. Ein weiteres Problem, das die bisherigen Vorrichtungen haben, ist ein Abfall der Helligkeit in dem Bereich, der das umhüllte Objekt umgibt und wie ein umschließender Schatten wirkt, der durch die Absorption von Licht verursacht wird.
Durch die Verwendung von nicht-absorbierendem Teflon anstelle von Metall, gelingt es den Ingenieuren, dieses Problem zu umgehen, so daß das verhüllte Objekt völlig flach aussieht. Insbesondere das Homeland Defense and Security Information Analysis Center ist daran interessiert, die neue Technologie für Drohnen zu nutzen – und nicht nur, weil damit sie visuell ,verschwinden’, sondern auch, weil sie eine elektronische oder Infrarot-Signatur verhindert, so daß es einfacher wird, das feindliche Radar zu unterfliegen. Offiziell ist die Technologie noch nicht im Einsatz.
Weiter mit den Elektro- und Solarfluggeräten...