Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und Solarschiffe (VI)
2012
Nach der sehr ausführlichen Dokumentation der Entwicklungen
im Bereich der Elektro- und Solarboote seit den Anfängen im 18. Jahrhundert
ist es müßig, nun alle neuen Designs und Entwürfe vorzustellen,
die sich zudem häufig ähneln. In dieser und den folgenden Jahresübersichten
werde ich mich daher auf besonders signifikante Ausführungen und wichtige
Umsetzungen konzentrieren.
Im Januar 2012 tritt die Nichio Maru ihre
Jungfernfahrt an, der erste Autotransporter von Nissan in
Japan, der neben einer reibungsarme Rumpfbeschichtung mit insgesamt
281 Solarpaneelen an Bord ausgestattet ist. Die 50 kW PV-Anlage
auf dem Schiffsdeck reicht aus, um die LED-Beleuchtung im Laderaum
und in den Mannschaftsräumen zu versorgen.

Zur Erinnerung: Schon im September 2008 waren auf dem 200 m langen Autotransporter Auriga Leader der Toyota Motor Corp. 328 Solarpaneele mit einer Leistung von 40 kW installiert worden.
Bereits im Juni wird ein weiterer Autotransporter in Dienst gestellt. Die Emerald Ace der Mitsui O.S.K. Lines Inc. (MOL) ist mit 768 Solarpaneelen an Deck ausgestattet, weshalb das Schiff keinen Treibstoff zur Stromerzeugung benötigt, wenn es im Hafen liegt. Hierfür wird der auf hoher See von der ca. 160 kW PV-Anlage erzeugte Strom in Lithium-Ionen-Batterien mit rund 2,2 MWh an Bord gespeichert. Was an der Bordwand plakativ und ziemlich übertrieben als ,Solar Hybrid’ bezeichnet wird.
Die 200 m lange Emerald Ace wurde im Rahmen eines Forschungsprojekts in Japan entwickelt, bei dem untersucht wird, inwieweit Solarzellen mit integrierten Lithium-Ionen-Akkumulatoren als Speichersystem für elektrische Energie dienen können. Ein positiver Nebeneffekt: Die Lithium-Ionen-Akkus befinden sich im unteren Bereich des Schiffes und fungieren durch ihr Gewicht gleichzeitig als Ballast.
Im März 2012 berichtet
die Presse, daß der kanadische Filmemacher und Tiefseeforscher James
Cameron mit
dem Spezial-U-Boot Deepsea Challenger in den kommenden
Monaten eine Expedition zum Marianengraben im westlichen Pazifik vor
Guam unternehmen, um im Challengertief, dem mit rund 11.000 m tiefsten
Punkt der Weltmeere auf Tauchgang zu gehen und Proben, Videos und Daten
von seltenen Meereslebewesen zurückzubringen.

Challenger
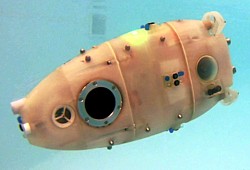
Das von Cameron mit entworfene, ungewöhnliche Mini-U-Boot ist vertikal aufgebaut, 7,3 m hoch und 11,8 Tonnen schwer. Die mit Elektronik und Lebenserhaltungsgeräten ausgestattete Pilotenkugel mit einem Innendurchmesser von 109 cm befindet sich am unteren Ende und ist mit flexiblen Polyesterbändern am Rest des Fahrzeugs befestigt. Der beengte Sitz im Inneren ist umgeben von Bildschirmen, Geräten, Schalttafeln und Anzeigen. Zwei Flaschen mit komprimiertem Sauerstoff und ein Kohlendioxid-Wäscher können den Insassen bis zu 56 Stunden lang am Leben halten.
Das Manövrieren geschieht mit zwölf Schubdüsen und außerhalb des U-Boots werden vier speziell angefertigte HD-Kameras in robusten Gehäusen Bilder in hoher Qualität aufnehmen, die von der 2 m langen LED-Leuchttafel des U-Boots beleuchtet werden. Dieses ist außerdem mit zwei hydraulisch betriebenen Auslegern ausgestattet, die vom Inneren der Kugel aus gesteuert werden können. Der eine ist mit Scheinwerfern ausgestattet, der andere mit einer 3D-Kamera, die weitere Aufnahmen ermöglicht.
Die Energieversorgung erfolgt durch mit Lithium-Polymer-Batterien in ölgefüllten, druckkompensierten Gehäusen. Unter einer transparenten Abdeckung sind in den Seiten des Rumpfes bis zu 70 Blöcke mit je 1 kWh untergebracht. Die über einen Joystick und eine Tiefen- und Kursautomatik gesteuerten zwölf horizontal und vertikal angebrachten Antriebsmotoren auf beiden Seiten des Auftriebskörpers erlauben eine horizontale Geschwindigkeit von 3 Knoten und eine vertikale von 2,3 Knoten.

Deepsea Challenger
Cameron plant, drei bis sechs Stunden auf dem Meeresboden zu verweilen. Zur Erinnerung: Jacques Piccard und Don Walsh hatten mit dem Bathyscaphe Trieste des Projekts Nekton der U.S. Navy im Januar 1960 eine Tiefe von 10.910 m erreicht, konnten sich dort aber nur etwa 20 Minuten aufhalten. Die Vergleichsaufnahme zeigt den beträchtlichen Größenunterschied der beiden Tauchboote.
Bei einer Testfahrt in dieser Woche nahe Papua New Guinea taucht der Regisseur, der eng mit der National Geographic Society zusammenarbeitet, innerhalb von gut zweieinhalb Stunden 8.166 m tief, womit er einen neuen Rekord für den tiefsten Solo-Tauchgang aufstellt. Für den Rückweg nach oben benötigt Cameron etwa 70 Minuten. Den Tauchgang zum Grund des Challengertiefs absolviert Cameron dann Ende März, wobei er nach 2 h 37 min eine Tiefe von 10.898 m erreicht und etwa drei Stunden dort verbringt.
Insgesamt werden im Rahmen der Expedition 13 bemannte und unbemannte Tauchgänge durchgeführt, die in dem Dokumentarfilm Deepsea Challenge 3D dokumentiert sind. Anläßlich des einjährigen Jubiläums seiner Reise beschließt der Filmemacher, die Deepsea Challenger, deren Entwicklung und Bau sieben Jahre dauerte, an die gemeinnützige Woods Hole Oceanographic Institution (WHOI) zu übergeben, was im Juni 2013 geschieht. Später wird das Tauchboot an verschiedene Museen verliehen.

(Grafik)
Ein erwähnenswertes Design bildet der im März 2012 vorgestellte GhostManta, ein speziell mit dem Ziel entwickeltes Tauchfahrzeug, die Unterwasserwelt und das Ökosystem in 3D zu dokumentieren, ohne die Meeresbewohner zu stören. Das Design ist ein Beispiel für Bio-Mimikry, bei dem die Designer versuchen, von der Evolution zu lernen - im vorliegende Fall vom Manta-Rochen, was auch die Namensgebung erklärt.
Das U-Boot wird von einem Elektromotor angetrieben und bietet genug Platz für zwei Forscher, um mühelos in die Tiefen des Meeres vorzudringen - und das schlanke Design sowie das Fehlen eines lauten Motors ermöglicht es Meeresbiologen und Fotografen, sich an Tiere heranzuschleichen, ohne sie zu verscheuchen. Eine robuste Glaskuppel, fünf 3D-Kameras, die 360°-Ansichten einfangen, leistungsstarke Scheinwerfer und der Wasserstrahlantrieb sorgen dafür, das Beste aus der Unterwasserwelt herauszuholen.
Das 7,5 m lange und 4 m breite Tauchfahrzeug der Designer Sebastian Campos Möller aus Mexiko und Caan Yaylali aus Savannah im US-Bundesstaat Georgia ist für Tauchtiefen bis 1.200 m geeignet. Technische Details zum Antrieb und den Akkus gibt es keine, es wird nur gesagt, daß dank der langen Batterielebensdauer Langzeitaufnahmen möglich sind.
Wissenschaftler der Virginia Tech um Prof. Shashank
Priya und Yonas Tadesse veröffentlichen
im März 2012 die im Netz einsehbare Studie ,Hydrogen-fuel-powered
bell segments of biomimetic jellyfish’, die auf einen Meeresbewohner
Bezug nimmt - sowie eine völlig neue Bewegungsmethode vorstellt.
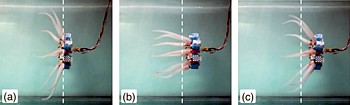
Die Forscher haben demnach einen etwa handgroßen Unterwasserroboter
aus Silikon entwickelt, der sich fortbewegt, indem er die Bewegungen
einer Qualle nachahmt.

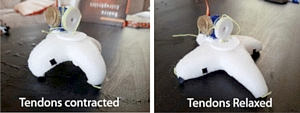
Das Besondere ist, daß der Roboter durch wärmeerzeugende Reaktionen angetrieben wird, die von seiner Oberfläche katalysiert werden, und hierfür den im Wasser vorhandenen Wasserstoff und Sauerstoff als Treibstoff nutzt. Dadurch soll der Robojelly theoretisch unendlich lange schwimmen können, da er seine Energie aus dem Wasser bezieht, in welchem er sich bewegt.
Die exothermen Reaktionen, die von der platinbasierten Oberfläche katalysiert werden, erzeugen Wärme, die auf die künstlichen Muskeln des Roboters übertragen wird, wodurch diese aktiviert werden, ihre Form verändern und die Maschine durch das Wasser vorantreiben. In der Natur ziehen kreisförmige Muskeln die Glocke der Qualle zusammen, wodurch Wasser ausgestoßen und die Qualle vorwärts getrieben wird.
Die Aktoren des Schwimmroboters, die den Muskeln der Mondqualle (Aurelia aurita) nachempfunden sind, bestehen aus einer Nickel-Titan-Legierung mit Formgedächtnis, die mit mehrwandigen Kohlenstoff-Nanoröhrchen ummantelt ist, die ihrerseits mit einem katalytischen Platinpulver beschichtet sind. Das Nebenprodukt der Reaktion ist verdampftes Wasser, das keine negativen Auswirkungen auf die Umwelt hat.
Der vom Office of Naval Research finanzierte und seit 2009 in Entwicklung befindliche Roboter soll den Weg für ein unbemanntes Überwachungs-U-Boot ebnen. Die nächste Phase der Forschung zielt darauf ab, die verschiedenen Segmente des Roboters einzeln mit Energie zu versorgen, um eine Richtungssteuerung zu ermöglichen.

Im März 2013 folgen Berichte, denen zufolge Ingenieurstudenten der Virginia Tech zwischenzeitlich an einem landesweiten 5 Mio. $-Projekt für die US-Marine arbeiten, um lebensechte, autonome Roboterquallen zu entwickeln. Die Partneruniversitäten in diesem Projekt sind das Providence College in Rhode Island, die University of California, Los Angeles, die University of Texas in Dallas und die Stanford University.
Ziel ist es, autonome Maschinen mit eigenem Antrieb in Gewässern zu plazieren, um die dortige Umwelt zu beobachten, aber auch für Zwecke wie die Untersuchung von Wasserlebewesen, die Kartierung des Meeresbodens und die Überwachung von Meeresströmungen.
Das aktuelle Modell namens Cyro mißt 170 cm im Durchmesser und wiegt etwa 77 kg. Das Design basiert der riesigen Feuerqualle (Cyanea capillata), die in den kalten Gewässern der Arktis, des nördlichen Atlantiks und des Pazifiks heimisch ist. Cryo besteht aus einem zentralen Kern von Komponenten in einer wasserdichten Hülle, die mit acht beweglichen Armen verbunden ist. Darüber liegt ein großes, weiches Stück weißes Silikon, das mit jedem der Arme in Kontakt kommt und flexibel bleibt. Zusammen bilden die Arme und das Silikon ein Antriebssystem, das die Fortbewegung echter Quallen nachahmt.
Wie sein Vorgänger befindet sich auch dieser Roboter noch im Prototypenstadium und ist Jahre vom Einsatz in Gewässern entfernt. Zwischen den kleineren und den größeren Robotern allerdings besteht ein großer Unterschied, denn der Cyro wird von einem Nickel-Metallhydrid-Akku angetrieben, während die kleineren Modelle gefesselt waren. Die Haut besteht aus einer dicken Silikonschicht über einem schalenförmigen Gerät, das die elektronischen Innereien des Roboters enthält.
In diesem Zusammenhang: Ein Team des California Institute of Technology und der Harvard University veröffentlicht im Juli 2012 die Studie ,A tissue-engineered jellyfish with biomimetic propulsion’, die allerdings nicht einsehbar ist. Darin geht es um die Konstruktion einer frei schwimmenden Qualle aus biosynthetischen Verbundmaterialien. Als Beweis für das Konzept der Medusoide wird eine Muskelpumpe aus chemisch dissoziiertem Rattengewebe und Silikonpolymer entworfen, die das strukturelle Design, die Schlagkinematik und die Wechselwirkungen zwischen Tier und Flüssigkeit quantitativ nachahmt.
Biomimetische Roboter in Form von Fischen und
anderen
Wasserlebewesen sind hingegen nicht neu. In den bisherigen
Jahresübersichten wurden beispielsweise der Roboterfisch Charlie aufgeführt,
den die CIA in den 1970er Jahren
entwickelt hat, der 2009 vorgestellte
Roboterfisch Shaol-1 der University
of Essex, der Roboterfisch der Universität
New York sowie
der Tauchroboter AQUA der kanadischen Universitäten
York, McGill und
Dalhousie von 2010 oder
der Wasserläufer-
Mikroroboter des Harbin Institute of Technology im
Juni 2011.
Der Vollständigkeit halber sollen hier als besonderer Schwerpunkt auch die weiteren Projekte aufgeführt werden, die sich mit elektrisch betriebenen Fischen und den entsprechenden Flossenantrieben beschäftigen, ebenso wie mit robotischen Nachahmungen anderer Wasserbewohner und deren Bewegungsmethoden.

Versuchstorpedo
Die Sowjetunion führte bereits in den späten 1950er Jahren bedeutende Forschungsarbeiten im Bereich der Hydrobionik durch, hauptsächlich am Leningrader Militärinstitut für Mechanik (Voenmehe). Ziel war es, die Effizienz von Tauchbooten, einschließlich bemannter Prototypen und torpedoähnlicher Geräte, zu verbessern, indem die Bewegungen und die Form von Meerestieren nachgeahmt werden.
Fotos und technische Informationen aus der Zeit des Kalten Krieges sind allerdings sehr rar. Hier abgebildet ist ein hydro-bionisches Versuchstorpedo mit Schwanzflossenantrieb, das als Waffe aber offenbar nie in Dienst gestellt wurde.
1969 wird unter der Leitung von Prof. E. P. Nosov ein zweisitziges U-Boot mit fischähnlichem Flossenantrieb anstelle eines Propellers entwickelt. Die Afalina-1 wird auf der Ausstellung der Errungenschaften der Volkswirtschaft (VDNKh) in Moskau 1970 mit einer Goldmedaille ausgezeichnet. Über weiterführende Informationen würde ich mich freuen.
Forscher des Massachusetts Institute of Technology (MIT)
konstruierten ab 1993 ihren ersten Roboterfisch namens RoboTuna,
der sechs Motoren besaß und aus 2.843 speziell gefertigten Einzelteilen
bestand. Ziel war es, ein Roboter-U-Boot zu bauen, das die Schwimmweise
von Thunfischen nachahmt, und herauszufinden, ob dies ein besseres
Antriebssystem für autonome Unterwasserfahrzeuge darstellen könnte.
Der Bau dauert etwa zwei Jahre.

Das Experiment ist ein Erfolg, denn der Fisch verbraucht weniger Energie als andere Roboter-U-Boote und erweist sich auch auch als manövrierfähiger. Ein Exemplar des 124 cm langen RoboTuna wird ab 2015 im Science Museum in London ausgestellt.
Zu dem Team, das an dem Projekt beteiligt war, gehörten Prof. Michael S. Triantafyllou, David Barrett - der den ersten Fisch namens Charlie I bis 1995 für seine Doktorarbeit baute - sowie David Beal und Michael Sachinis, die später mehrere Änderungen vornahmen, darunter ein Seilzugsystem, um den RoboTuna II herzustellen. Ein Bericht darüber von Triantafyllou et al. erscheint im März 2003 unter dem Titel ,Separation and Turbulence Control in Biomimetic Flows’.

von Alvarado
In seiner Dissertation am MIT im Jahr 2007 stellt Pablo Valdivia y Alvarado dann einen alternativen Ansatz zur Implementierung biomimetischer fischähnlicher Schwimmtechniken vor, die die natürliche Dynamik nachgiebiger Körper nutzen (,Design of biomimetic compliant devices for locomotion in liquid environments’).
2009 zeigt Alvarado zusammen mit seinem Professor Kamal Youcef-Toumi die ersten Prototypen eines ganzen Schwarms von Roboterfischen, die etwa 12 cm lang sind. Spätere Versionen sind ca. 20 cm lang. Je nach Größe benötigen sie 2,5 - 5 W Strom.
Die neuen Modell werden von einem einzigen Motor angetrieben und bestehen aus weniger als zehn Einzelteilen, einschließlich eines nachgiebigen Körpers aus weichen Polymeren. Der Motor, der sich in der Mitte des Fisches befindet, löst eine Welle aus, die sich entlang des flexiblen Körpers vom Kopf zum Schwanz bewegt und den Roboterfisch vorwärts treibt - der allerdings noch ein Stromkabel hinter sich herzieht. Im Oktober 2016 erscheint das Buch ,Robot Fish: Bio-inspired Fishlike Underwater Robots’ von Youcef-Toumi, Alvarado u.a., das allerdings über 100 € kostet.

Um im Kontext zu bleiben: Bereits im Januar 2013 stellt ein anderes Team des MIT um die Professorin Daniela Rus und den Doktoranden Robert K. Katzschmann einen weichen Roboterfisch namens SoFi (Soft Fish) vor, der bereits erfolgreich getestet wurde und schon ein Jahr später 40 Minuten am Stück um Riffe in Fidschi schwimmt und dabei genau wie ein echter Fisch Strömungsänderungen bewältigt.
Die Rückseite des kleinen SoFi besteht aus Silikongummi und flexiblem Kunststoff, so daß er ein Riff nicht beschädigt, wenn er dagegen stößt. Diese Flexibilität und Weichheit ermöglicht es ihm auch, leichter zu schwimmen. Als Antrieb pumpt ein Motor Wasser in ballonartige Kammern im Schwanz des Roboters. Wenn sich eine Kammer ausdehnt, biegt sie sich zu einer Seite hin. Dann drücken Aktuatoren Wasser in die andere Kammer, die sich auf die andere Seite biegt. Dieses Hin und Her erzeugt eine Bewegung, die der eines echten Fisches sehr ähnlich ist. Flossen an der Seite helfen bei der Anpassung der Neigung, wenn der Fisch nach oben oder unten tauchen soll.
SoFi wird von einem Lithium-Polymer-Akku betrieben und kann dank eines Fischaugenobjektivs in seiner ,Nase’ filmen und hochauflösende Fotos machen. Zur Steuerung entwickeln die Forscher ein spezielles Ultraschall-Kommunikationssystem. Da SoFi bislang nur eine Tiefe von etwa 18 m erreichen kann, braucht er aber noch etwas Arbeit. Weitere Verbesserungen, die in Erwägung gezogen werden, sind ein Live-Video-Streaming.
Im März 2018 erscheint die im Netz einsehbare Studie ,Exploration of underwater life with an acoustically controlled soft robotic fish’ mit einer ausführlichen Darstellung der Entwicklung.
Im weiteren Verlauf entwickeln die Experten des MIT eine Methode, um innerhalb von Stunden schwimmende Robo-Seesterne mit weichem Körper zu bauen, wie sie in ihrer einsehbaren Studie ,Underwater Soft Robot Modeling and Control With Differentiable Simulation’ vom März 2021 berichten. Das Team um Daniela Rus und Prof. Wojciech Matusik löst damit das Problem, daß oftmals zahlreiche Prototypen entwickelt werden müssen, um schließlich ein Gerät zu schaffen, das die Unterwasserlebewesen nicht erschreckt, weil es ihnen unnatürlich erscheint. Dieser Prozeß ist nicht nur teuer, sondern es kann auch mehrere Wochen oder länger dauern, bis ein fertiges Produkt vorliegt.
Die Wissenschaftler entwickeln daher ein auf maschinellem Lernen basierendes Simulationssystem, das den Entwicklungsprozeß erheblich beschleunigt. Auf Grundlage bestimmter Anforderungen erstellt dieses System ein Computermodell, das darstellt, wie ein solcher Roboter gebaut werden könnte und wie er schwimmen würde, woraufhin rasch ein erster Prototyp angefertigt wird.
Die realen Leistungsdaten bei Tests dieses Roboters in einem Wassertank werden wieder in das Computermodell eingespeist, um es weiter zu optimieren. Auf diese Weise ist das Team in der Lage, innerhalb weniger Stunden ein funktionsfähiges Produkt herzustellen, wobei nur wenige Prototypen angefertigt werden müssen.
Die aktuelle Version des Robo-Seesterns besteht aus einem weichen Silikonkörper und einem einzelnen Motor mit geringer Leistung, der mit den Sehnen in jedem der vier Beine des Roboters verbunden ist. Durch abwechselndes Zusammenziehen und Loslassen dieser Beine kann der Roboter leise und effizient durch das Wasser schwimmen. Von einer Bordbatterie angetrieben und mit Sensoren wie Kameras zur Erfassung ozeanografischer Daten ausgestattet, könnte der Roboter in Zukunft ein kostengünstiges Forschungsinstrument darstellen. Möglicherweise werden bald auch Roboter-Schildkröten, Mantarochen und Haie hinzukommen, die alle mit Hilfe des neuen Simulationssystems entwickelt werden sollen.
Neu ist der Ansatz aber nicht: Schon Mitte der 1960er Jahre entwickelten die Professoren Ingo Rechenberg und Hans Paul Schwefel an der TU Berlin mit ihrer Evolutionsstrategie ein technisches Optimierungsverfahren nach dem Vorbild der der biologischen Evolution, das sie insbesondere für strömungsmechanische Probleme nutzten.
Roboter
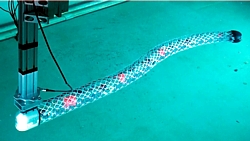
Die Forscher des MIT - darunter auch Triantafyllou aus dem ursprünglichen RoboTuna-Team - berichten im Februar 2023 über die Entwicklung eines innovativen Ansatzes für den Bau verformbarer Unterwasserroboter, bei dem einfache, sich wiederholende Unterstrukturen anstelle von Einzelteilen verwendet werden. In der einsehbaren Studie ,Modular Morphing Lattices for Large-Scale Underwater Continuum Robotic Structures’ beschreiben sie den einfachen Aufbau und die Skalierbarkeit ihres neuen Wasserschlangen-Roboters, dessen Konstruktion nicht auf Materialien mit hoher Festigkeit angewiesen ist.
Diesmal sind an der Entwicklung Kolleginnen und Kollegen der Westlake University in Hangzhou, China, des Demokritos Research Center in Athen, der Technischen Universität Tschechien in Prag sowie der Firma Discrete Lattice Industries LLC beteiligt.
Das neue System besteht aus Voxeln, hohlen Strukturen aus gegossenen Kunststoffteilen, in denen Streben in komplexen Formen eingearbeitet sind. Durch die Kombination steifer und flexibler Komponenten in unterschiedlicher Anordnung haben die daraus erstellten Strukturen die Eigenschaft, in einer Richtung stabil und belastbar, in der anderen Richtung weich und verformbar zu sein.
Den Wissenschaftlern zufolge lassen sich mit der Voxel-Technik weiche Unterwasserroboter in beliebigen Formen und Größen konstruieren. So kann beispielsweise ein glatter Roboter gebaut werden, der seine Form wie ein Fisch dynamisch verändern und sich damit effizienter im Wasser fortbewegen kann als eine Version mit starrer Rumpfkonstruktion. Auch der Antrieb für einen solchen Aufbau kann deutlich sparsamer arbeiten und Energie sparen.
Getestet wird die Voxel-Technik beim Bau eines neuen RoboTuna, dessen aalartiger Körper aus einer aneinandergereihten Kette von vier Segmenten besteht, die jeweils aus fünf Voxeln zusammengesetzt sind. Die Voxel sind mit einem Draht verbunden, die über einen Aktuator angesteuert werden, der sie zusammen zieht oder wieder entfalten läßt. Dadurch kann sich der aus 20 Einheiten bestehende Roboter biegen, der rundum eine rippenartige stützende Struktur besitzt, die wiederum von einer glatten Neoprenhaut umgeben ist.
Und während der ursprüngliche RoboTuna aus fast 3.000 Teilen bestand, sind es bei der neuen Konstruktion gerade mal 60, weshalb sich der Robo-Aal auch in nur zwei Tagen zusammenbauen ließ. Um zu zeigen, daß die Voxel-Technik auch in anderen Formen angewendet werden kann, baut das Team eine weitere Konstruktion in Form eines dynamisch veränderbaren Hydrofoil-Flügels etwa für Tragflächenboote oder als flexibles Element an Schiffsrümpfen, was dabei helfen soll, widerstandsverursachende Verwirbelungen zu mindern, so daß die Schiffe energieeffizienter werden.
Eine gewisse Bekanntheit erlangt der Roboshark, ein
1,80 m großer Roboterhai, der 2003 von Andrew
Sneath hergestellt wurde, da er die Hauptrolle in einem BBC
Natural History Unit Wildlife Special mit dem Titel ,Smart Sharks:
Swimming with Roboshark’ spielt, in welchem eine an dem Roboterhai
befestigte Kamera verwendet wird, um einzigartige, sichere Unterwassernahaufnahmen
von Walhaien, Bullenhaien und Weißen Haien zu machen.
Der Körper des Roboshark besteht aus einer robusten Verbundstruktur, in der die Batterie, die Motoren und das Steuersystem untergebracht sind. Nach der Ausstrahlung des Films ,lebt’ Roboshark - ein ein Finalist bei den Royal Television Awards - sechs Monate lang im National Marine Aquarium in Großbritannien und wird später an das National Marine Aquarium in Plymouth ausgeliehen.
Sneaths 2001 gegründete Firma Hydrodome LLC in Florida bietet Robosharks mit einer Länge von 1,5 - 5 m für Poolpartys an - ebenso wie einen Fish-E genannten Roboter, der dem Blauflossen-Thunfisch nachempfunden ist; einen Robodolphin, den Kinder von 4 - 14 Jahren reiten können; sowie einen HydroBOB genannten ,Unterwasserscooter’ mit eingebauter Sauerstofflasche, der dem AquaStar in der Übersicht 2007 ähnelt. Nach 2012 scheint es die Firma aber nicht mehr zu geben und die Informationen sind nur noch auf web.archive.org zu finden.
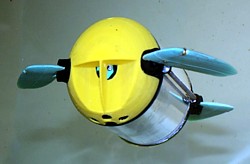
Auf der Hannover Messe im April 2008 stellt die Festo AG & Co. KG mit dem AquaJelly eine selbststeuernde, autonome Qualle vor, die einen elektrischen, peristaltischen Rückstoß-Antrieb durch acht Tentakel mit ,Fin Ray Effect’ besitzt. Darüber hinaus besteht das künstliche Geschöpf aus einer transluzenten Halbkugel und einem zentralen Druckkörper. Die Halbkugel ist mit einer ringförmigen Steuerplatine mit integrierten Licht-, Druck- und Funksensoren ausgestattet wobei ein Prozessor permanent die Stellung des Antriebssystems überwacht. Außerdem befinden sich auf dieser Platine je acht weiße und acht blaue LEDs, die zusammen mit den Sensoren die Kommunikation zwischen mehreren Quallen ermöglichen. Das Resultat ist ein selbststeuerndes System mit ausgeprägtem kollektivem Verhalten.

Auf der Außenseite besitzt AquaJelly zwei konzentrische silberne Ringe, auf die eine leitende Metallfarbe aufgebracht wurde. Daran angeschlossen ist die Laderegelung, die die Energieversorgung sicherstellt. Kommt die Roboterqualle an die Ladestation, die oberhalb des Wasserbeckens angebracht ist, wird die angesaugt und mit Strom versorgt, was bei vollständiger Entladung ca. drei Stunden dauert.
Der wasserdichte Druckkörper enthält wiederum den zentralen elektrischen Antrieb, zwei 4.000 mA Lithium-Ionen-Polymer-Akkus, die Laderegelung sowie die Servomotoren für die Taumelscheibe. Der elektrische Antrieb bewegt über zwei Kurbeln je einen Hubteller, der auf der Ober- und Unterseite des Druckkörpers angebracht ist. Diese Kurbeln sind um 60° versetzt zueinander angeordnet, während an die Hubteller acht Rautengelenke angeschlossen sind, die die acht Tentakel in eine wellenförmige Bewegung versetzen. Die Steuerung im dreidimensionalen Raum erfolgt durch Gewichtsverlagerung. Unter dem Titel AquaJellies 2.0 werden später mehrere der autonomen Systeme gezielt vernetzt, um gemeinsam größere Aufgaben zu lösen.
Auf der Hannover Messe 2009 demonstriert die Firma dann die AquaPenguins, die wie ihr biologisches Vorbild über eine energieeffiziente Strömungsform verfügen und mit Hilfe ihres Flügelantriebs auf engstem Raum durchs Wasser manövrieren, auf der Stelle wenden und – anders als ihr natürliches Pendant – sogar rückwärts schwimmen können.

Nochmals ein Jahr später, auf der Hannover Messe 2010 stellt die Festo AG mit dem AquaRay (o. Aqua_ray) einen ca. 10 kg schweren, ferngesteuerten wasserhydraulisch betriebenen Fisch mit Schlagflügelantrieb vor, der in Form und Kinematik dem Bewegungsmodell eines Mantarochens nachempfunden ist. Als Aktuatoren dienen die bionischen Fluidic Muscles von Festo, die im Wesentlichen aus einem hohlen Elastomerzylinder mit eingewobenen Aramidfasern bestehen. Wird die Kunstmuskel mit Luft oder Wasser befüllt, vergrößert sie sich im Durchmesser und zieht sich in der Länge zusammen. Dadurch wird eine fließend-elastische Bewegung ermöglicht.
Eine wasserbetriebene zentrale Flügelzellenpumpe erzeugt die erforderliche Energie, die in Form von Druck über Ventile an drei antagonistisch arbeitende Muskelpaare weitergegeben wird. Deren Zugkraft wird durch künstliche Sehnen über Rollen und Sehnenscheiden auf die Flügel und den Schwanz übertragen, welche den Kraftweg von 55 mm zu einem Flügelschlag von mehr als 550 mm nutzen. Der 61,5 cm lange und 96 cm breite Aqua_ray läßt sich hervorragend manövrieren und kann sowohl als hydrostatischer Gleiter als auch mit aktivem Flügelschlag betrieben werden.

Im Vorgriff auf die chronologische Darstellung: Im Jahr 2018 folgt mit dem BionicFinWave ein biomimetischer Unterwasserroboter, der das Schwimmen von Meeresstrudelwürmern und Nilhechten nachahmt und seine präzise Fortbewegung durch Einsätze in einem Rohrsystem demonstriert. Um sich zu bewegen, erzeugt der Fischroboter mit seinen Längsflossen eine durchgängige Welle, die sich entlang seiner gesamten Länge voran schiebt, wodurch ein Vorwärtsschub entsteht. Umgekehrt können die Tiere so auch rückwärts schwimmen und je nach Wellenmuster für Auftrieb, Abtrieb oder gar Seitenschub sorgen.
Im Test manövriert sich der autonome, 37 cm lange und 430 g schwere BionicFinWave mit dieser sogenannten undulierenden Flossenbewegung durch ein Rohrsystem aus Acrylglas. Dabei kommuniziert er über Funk mit der Außenwelt und überträgt Sensorwerte für Temperatur und Druck an ein Tablet.
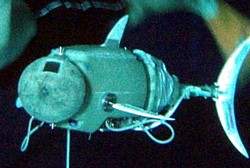
Auch Forscher der Michigan State University um den
Ingenieur Xiaobo Tan und die Ökologikprofessorin Elena
G. Litchman arbeiten ab September 2009 an
einem Roboterfisch zur Überwachung der aquatischen Umwelt. Das Projekt
unter dem Namen AquaSwarm Robot Fish Project (Small
Wireless Autonomous Robots for Monitoring of Aquatic Environments)
wird von der National Science Foundation (NSF) mit über 400.000 $ gefördert,
um die Technologie eines Antriebs mit künstlichen Flossen zu entwickeln,
der die Fischbewegung imitiert.

Michigan State University
Diese Flossen bestehen aus elektro-aktiven Polymeren, die beim Anlegen von Elektrizität ihre Form verändern. Ähnlich wie bei echtem Muskelgewebe drehen und beugen die Bewegungen der Ionen das Polymer, wenn Spannung angelegt wird. Die Forscher haben bereits einen ca. 23 cm langen Prototyp gebaut, der einem Gelbbarsch nachempfunden ist.
Der entwickelte gleitende Fischroboter wird für mehrere Anwendungen im Feld getestet. Bei einem Test wurde die Rohölkonzentration im Kalamazoo River, Michigan, gemessen. Ein weiteres Beispiel ist der Einsatz der autonomen Roboter im Wintergreen Lake, um die Verteilung von schädlichen Algenblüten zu erkennen und die Temperaturen in Wassersäulen zu messen.
Ebenfalls 2009 wird an der britischen University
of Bath an einem Gymnobot gearbeitet, der
einem Süßwasser-Knifefish aus Amazonien nachempfunden ist und dessen
wellenartige Bewegung nachahmt.

Dabei wird die Vorwärtsbewegung durch eine Flosse erzielt, die entlang der Unterseite des starren Fischkörpers verläuft und im Wasser eine Welle verursacht, welche den Roboter dann vorwärts treibt. Entwickelt hat den mechanisch aufwendigen Gymnobot Keri Collins im Rahmen ihrer Doktorarbeit, finanziert wurde das Projekt von BMT Defence Services und dem Engineering & Physical Sciences Research Council.
Das Labor Universität erhält zudem einen Zuschuß für die Zusammenarbeit mit sechs anderen europäischen Einrichtungen, um einen ähnlichen Roboter zu entwickeln, der auf die Wasserströmung reagiert und gegen die Strömung schwimmen kann. Neben der Erforschung der Artenvielfalt in Küstennähe und in schnell fließenden Flüssen soll er auch zur Erkennung von Umweltverschmutzung oder zur Inspektion von Bauwerken wie Ölplattformen eingesetzt werden.
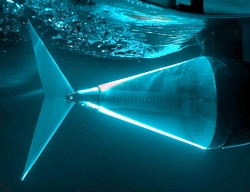
Im August 2010 veröffentlicht Prof. John H.
Long vom Vassar College in Poughkeepsie,
New York, den Bericht über einen künstlichen Zitterrochen, der ffizient,
enorm manövrierfähig und bestens geeignet für heimliche Überwachungen
ist - und damit die Leistungsvorgaben der US-Navy erfüllt, die das
Projekt in der ersten Phase mit 70.000 $ gefördert hat (,An electric
ray inspired Biomimetic Autonomous Underwater Vehicle’).

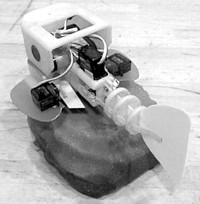
Der 5 kg schwere RayBot hat alle Eigenschaften eines erfolgreichen Roboterfischs und ist so konzipiert, daß er selbständig an eine bestimmte Stelle eines Gewässers schwimmt, um dann auf den Grund zu gleiten – genau wie ein echter Rochen sinkt er, sobald er zu schwimmen aufhört. Dort setzt er sich auf dem sandigen Meeresboden fest, wo er bei sehr geringem Stromverbrauch über einen langen Zeitraum Daten sammeln kann.
Mit den entsprechenden Sensoren ausgerüstet, ist der RayBot beispielsweise in der Lage, Ölverschmutzungen aufzuspüren, Temperatur, Salzgehalt oder die Menge der Biomasse zu ermitteln, die Pflanzen in einem bestimmten Meeresgebiet produzieren oder auch die Bewegungen von auf dem Boden lebenden Meerestieren aufzuzeichnen. Dabei kann er dank seiner winzigen Ultraschallmotoren sehr leise operieren.
Der Robo-Rochen mit dem Silikonkörper - hier ist der experimentelle Prototyp RayBot 3.3 abgebildet - hat es bislang aber noch nicht in die freie Wildbahn geschafft, weil das Office of Naval Research für die zweite Phase keine Fördergelder mehr zur Verfügung gestellt hat.
Erfolgreicher ist hingegen ein anderer bionischer Roboter namens Madeleine, etwa so groß wie eine Meeresschildkröte, der etwa 2007 weiter zu Transphibian entwickelt wurde – einem unbemannten, autonom operierenden Unterwasserfahrzeug, das die Firma iRobot aus Bedford im US-Bundesstaat Massachusetts herstellt und vertreibt. Ein Prototyp des schwimmenden und gehenden Roboters war unter dem Namen TURTLE (Tele-operated Unmanned Robot for Telemetry and Legged Exploration) konstruiert worden.

(im Einsatz)
Der von Longs Team konzipierte Vierflossenantrieb erlaubt es Transphibian, unter und über Wasser sicher in sechs Freiheitsgraden zu navigieren, wobei die Hightech-Maschine auf engstem Raum wendet und Hindernissen geschickt ausweicht. Zudem ist der Roboter fähig, unter Wasser schwimmend große Distanzen zurückzulegen. Allerdings besteht nur noch entfernte Ähnlichkeit mit einem Fisch.
Anderen Quellen zufolge wurde der Transphibian ursprünglich von der Nekton Research LCC in Durham, North Carolina, entwickelt, die im September 2008 von der iRobot übernommen wurde. Der Prototyp, der mit einem Joystick manövriert werden kann, hat die Aufgabe der Unterwasser-Bombendetektion: Er soll Minen zerstören, die Marines und Navy SEALs töten könnten, wenn sie an Land kommen.
Das ca. 60 cm lange Kamikaze-Fahrzeug, das eines Tages 7 kg Plastiksprengstoff tragen und sich vor der Zündung an eine Unterwasserbombe haften soll, war bereits 2003 im Hafen von Um Quasar im Irak getestet worden - allerdings nur zur Detektion, um den Weg für ein britisches Schiff frei zu machen. Die Transphibians brauchten etwa 16 Stunden, um fast eine Quadratmeile abzusuchen und den Tauchern dabei zu helfen, eine ungenannte Anzahl von Minen zu lokalisieren - wofür die Taucher ohne diese Technologie nach Angaben der Marine 21 Tage gebraucht hätten.

Seaglider
Die seit 2002 für den autonomen Staubsaugerroboter Roomba bekannte iRobot hat ab ihrer Gründung 1990 eine Vielzahl von Robotern entwickelt, darunter diverse fürs Militär und die Polizei - ebenso wie das autonome Unterwasserfahrzeug Seaglider, das für monatelange Einsätze über Tausende von Kilometern ausgelegt ist.
Der iRobot Seaglider, der nur entfernte Ähnlichkeit mit einem Fisch aufweist, wird beispielsweise bei der Ölkatastrophe im Golf von Mexiko wird im Mai 2010 eingesetzt. Der Tauchroboter war ursprünglich von der University of Washington in Seattle entwickelt worden - und Mitte 2008 hatte sich die iRobot das System lizenzieren lassen, um es für militärische Anwendungen zu adaptieren und auch anderweitig zu kommerzialisieren.
Im Zuge dessen führt der 52 kg schwere und speziell für tiefe Taucheinsätze bis 1.000 m konzipierte Seaglider im Laufe des Jahres 2009 im Pazifischen Ozean eine Rekordmission über einen Zeitraum von neun Monaten und fünf Tagen durch, bei der er Dank seines energiesparenden Antriebs 737 Tauchgänge durchführt und eine Strecke von mehr als 4.900 km zurücklegt. Das 1,8 m lange und 30 cm dicke Gerät besitzt 1 m breite Stummelflügel sowie eine 1 m lange Antenne, über welche die gewonnenen Daten verschickt werden.
Interessant ist das Bewegungsprinzip des schwimmenden Roboters, da er sich ohne Propeller fortbewegt. Um zu tauchen, wird ein Ballasttank geflutet, wobei der schwere Akku nach vorn geschoben wird, damit sich die Nase des Seagliders nach unten richtet. Mittels der Flügel gleitet er daraufhin in einem schrägen Winkel von 16° - 45° abwärts, anstatt nur gerade zu sinken. Nach dem Tauchgang wird der Akku wieder nach hinten verschoben, wodurch sich die Nase aufrichtet und der inzwischen leergepumpte Ballasttank für Auftrieb sorgt. Dadurch gleitet der Seaglider in einem Winkel wieder zur Oberfläche auf.

im Einsatz
Mit seinen 10 V und 24 V Li-Io-Batteriepacks erreicht der Seaglider eine durchschnittliche Geschwindigkeit von 25 cm/s und kann bis zu zehn Monate lange autonome Missionen durchführen. Die iRobot berichtet nun, daß sie bereits 120 Seaglider an die US Navy, verschiedene Behörden und Forscher verkauft habe.
Berichten im November 2014 zufolge wird der Seaglider bereits seit zwei Jahren eingesetzt, um neue Informationen zu sammeln, die Wissenschaftlern des California Institute of Technology (Caltech) um Prof. Andrew F. Thompson dabei helfen werden, festzustellen, warum und wie schnell das Polareis schmilzt. Tatsächlich wird dabei herausgefunden, daß warmes Wasser in Küstennähe der Hauptfaktor für das Schmelzen des Eises ist, wobei durch Meeresströmungen verursachte Ozeanwirbel eine wichtige Rolle dabei spielen, dieses warme Wasser an die antarktische Küste zu transportieren.
Die Ergebnisse werden in einem kurzen Artikel mit dem Titel ,Eddy transport as a key component of the Antarctic overturning circulation’ veröffentlicht, der sich im Netz abrufen läßt.
Daß der Einsatz der Seaglider auch in den Folgejahren weitergeht, belegen z.B. Meldungen vom Mai 2022. Hier wird berichtet, daß die tief tauchende Unterwasserdrohne eine autonome Methode zur Verfolgung der CO2-Aufnahme in entlegenen Winkeln des Ozeans und weit unter seiner Oberfläche bietet. Hierzu muß allerdings zuerst der präziseste Unterwasser-Kohlendioxidsensor auf dem Markt überarbeitet werden, der in seiner bisherigen Form zu groß war und zu viel Strom verbrauchte, um vom Seaglider transportiert werden zu können.
Anschließend setzt das Team um die Ozeanografin Claudine Hauri von der University of Alaska Fairbanks die Unterwasserdrohne in der Resurrection Bay in Alaska ein, um Daten aus der Praxis zu sammeln.
Ein
Team um Prof. Malcolm MacIver von der Northwestern
University in Illinois berichtet im Januar 2011 über
die Entwicklung eines Unterwasserroboters, der sich mit einer messerartigen
Flosse fortbewegt. Der GhostBot genannte Kunstfisch
ahmt den im Amazonasbecken beheimateten schwarzen Geistermesserfisch nach,
der nicht nur seine Umgebung wahrnimmt, indem er ein schwaches elektrisches
Feld erzeugt, sondern dank einer einzigen gewellten, bandartigen
Flosse, die an seiner Unterseite entlangläuft, sich auch vorwärts
oder rückwärts, nach oben oder unten bewegen kann.

Zusammen mit seinem Doktoranden Oscar Curet baut MacIver einen Roboter-Messerfisch, der allerdings auch nach drei Versuchen immer noch nicht genügend Freiheitsgrade in seiner Flosse hat. Mit Hilfe des Start-Ups Kinea Design, ein von der Northwestern-Fakultät gegründetes Unternehmen, das sich auf interaktive Mechatronik spezialisiert hat, gelingt es nach sieben Monaten und 200.000 $ eine vierte Version des GhostBot zu entwickeln, die in einem Wasserströmungstunnel an der Harvard University getestet wird - und nun einwandfrei funktioniert.
Die mit Lycra überzogene Flosse des Fischroboters enthält 32 künstliche Flossenstrahlen, von denen jeder von einem separaten Motor gesteuert wird, um eine fischähnliche Bewegung zu erzeugen. Und wie sein Gegenstück in der realen Welt ist auch der GhostBot mit einem elektrosensorischen System ausgestattet. MacIvers nächstes Ziel ist es, dieses System mit dem Ein-Flossen-Antriebssystem so zu koordinieren, daß der Roboter Objekte erkennen und sich dann an ihnen entlang bewegen kann.
Im April 2011 startet die von der EU mit 2,9 Mio.
€ finanzierte Forschung im Rahmen des Projekts CoCoRo (Collective
Cognitive Robots) zu Unterwasserroboterschwärmen, das bis zum September 2014 läuft.
Ziel ist die Entwicklung eines kollektiv agierenden Schwarms autonomer
Unterwasserfahrzeuge, die mit bio-inspirierten Algorithmen koordiniert
werden und untereinander kommunizieren. Beteiligt sind Wissenschaftler
und Institute aus Österreich, Deutschland, Großbritannien, Belgien
und Italien, Projektkoordinator ist Prof. Thomas Schmickl an
der Karl-Franzens-Universität Graz, dessen Homepage
sich eine ausführliche Beschreibung des Projekts findet.
Der CoCoRo-Roboter Lily z.B. basiert auf umgerüsteten schildkrötenförmigen U-Boot-Spielzeugen, und kleine blinkende blaue Lichter sind eines ihrer Kommunikationsmittel. Ein anderer Roboter, der schon mehr wie ein Fisch aussieht, wird Jeff genannt. Die Ergebnisse der Versuche, darunter auch mit dem bislang weltweit größten autonomen Unterwasserschwarm aus 41 Robotern drei verschiedener Typen, sowie der Feldversuche im Hafen von Livorno, Italien, werden 2015 in 55 Videos veröffentlicht (,The Year of CoCoRo’).
Über einen weiteren Roboter-Rochen wird im Juli 2012 berichtet. Diesmal geht es eine Entwicklung an der University of Virginia (UVA) in Charlottesville, an der ein Team unter der Leitung der Professorin Hilary Bart-Smith arbeitet. Mit beteiligt sind Kollegen der Princeton University, der University of California, Los Angeles (UCLA) sowie der West Chester University in Pennsylvania.

Der Mantabot, der tatsächlich aus dem Körper eines Rochens geformt wurde, ist dem Kuhnasenrochen nachempfunden, der zur Familie der Fledermausrochen gehört. Andere Mitglieder dieser Familie sind der Mantarochen und der Stachelrochen, die alle mit einer fliegenden Bewegung schwimmen - als hocheffiziente Form eines Unterwasserantriebs.
In seiner jetzigen Form ist der Roboterrochen gefesselt und wird von einem menschlichen Bediener über Computerbefehle ferngesteuert. Er hat einen wasserdichten Kunststoffkörper, der seine elektronischen Komponenten und Batterien enthält, während seine Flügel aus flexiblem Silikon bestehen. Die Form und Ausrichtung dieser Flügel wird durch das Ausdehnen und Zusammenziehen von Stäben und Kabeln in ihnen verändert, so daß der Roboter beschleunigen, gleiten, sich drehen oder seine Position halten kann, genau wie sein echtes Pendant.
Die Maschinenbauingenieure der UVA publizieren im September 2019 gemeinsam mit Kollegen der Harvard University einen Bericht über ihre Entwicklung eines Roboter-Thunfischs, der speziell dem Gelbflossenthun und der verwandten atlantischen Makrele nachempfunden ist und genauso schnell schwimmen kann wie ein echtes Tier. Der Artikel mit dem Titel ,Tuna robotics: A high-frequency experimental platform exploring the performance space of swimming fishes’ ist im Netz einsehbar.
Der Tunabot mißt etwa 25,5 cm in der Länge und ist damit deutlich kleiner als der echte Thunfisch, der bis zu 2 m lang werden kann. Bei einer laserbasierten Analyse der Bewegungen in Strömungstanks an beiden Universitäten zeigt sich, daß der Fischroboter mit einer Höchstgeschwindigkeit schwimmen kann, die der eines echten Gelbflossens derselben Größe entspricht - etwa vier Körperlängen pro Sekunde. Dabei verbiegt er seinen flexiblen Körper schnell und ähnlich wie ein lebender Thunfisch.
Die Tests im Wassertank ergeben, daß der Roboter mit einem 10 Wh Akkupack eine Geschwindigkeit von 0,4 m/s über eine Strecke von etwa 9 km erreichen könnte. Wird die Geschwindigkeit auf 1 m/s erhöht, sinkt die Reichweite auf etwa 4 km. Die maximale Frequenz des Schwanzflossenantriebs beträgt 15 Hz.
Da das Projekt vom US Office of Naval Research finanziert wird, hoffen die Wissenschaftler, daß die Tunabot-Forschung zu schnelleren und effizienteren Antriebssystemen für bemannte und unbemannte Unterwasserfahrzeuge führt - und planen bereits, ein System zu entwickeln, das die Leistung eines echten Thunfischs übertrifft.
Im Juni 2020 folgt die gemeinsam mit Wissenschaftlern des Max-Planck-Instituts für Intelligente Systeme (MPI-IS) um Ardian Jusufi verfaßte Studie ,Fish-like aquatic propulsion studied using a pneumatically-actuated soft-robotic model’, in der die wellenartige Fortbewegung eines schwimmenden Soft-Roboters untersucht wird. Um festzustellen, wie Steifigkeit und Beweglichkeit des Fischkörpers bzw. die Geschwindigkeit der Bewegungen von rechts nach links die Schwimmbewegung beeinflussen, war ein fischähnliches Modell aus weichem Silikon entwickelt worden.
Eine weitere Arbeit, an der neben Jusufi auch Forscher der Seoul National University und der Harvard University beteiligt sind, erscheint bereits im März 2021 unter dem Titel ,Modeling and Control of a Soft Robotic Fish with Integrated Soft Sensing’. Sie ist im Netz einsehbar. Ausgangspunkt ist der Fakt, daß Fische ein sensorisches System namens Seitenlinie haben, mit dem sie Bewegungen, Vibrationen und Druckunterschiede im Wasser wahrnehmen können.

Roboterfisch
Die Wissenschaftler geben nun einem Roboterfisch eine eigene Version dieses Systems, mit der er die beste Schwimmgeschwindigkeit bestimmen kann. Damit schaffen sie einen Roboter mit weichem Körper, der in der Lage ist, an Ort und Stelle gegen eine Wasserströmung zu schwimmen.
Seine wellenförmige Schwimmbewegung wird durch eine Reihe miteinander verbundener Silikonkammern ermöglicht, die sich an beiden Seiten des Körpers befinden. Wird abwechselnd wird Luft in die Kammern auf der einen Seite hinein-, und aus denen auf der anderen Seite herausgepumpt, dehnt sich die aufgeblasene Seite aus und wölbt sich nach außen, während sich die entleerte Seite nach innen wölbt.
Das Seitenliniensystem des Roboters besteht aus zwei mit Flüssigmetall gefüllten Silikon-Mikrokanälen, die sich über die gesamte Länge jeder Seite erstrecken. Sobald sich jeder dieser Kanäle ausdehnt, während sich die Seite des Körpers krümmt, erhöht sich der elektrische Widerstand des Flüssigmetalls darin. Durch die Überwachung der Widerstandsveränderungen kann daher festgestellt werden, wie stark ein bestimmter Luftdruck den Körper des Roboters zum Wackeln bringt.
Indem eine selbstlernende Schleife eingerichtet wird, in der ein mit dem Roboter verbundener Computer die sich ändernde Strömungsgeschwindigkeit des Wassers mißt und dann den Luftdruck automatisch an diese Information anpaßt, kann der Roboter kontinuierlich eine Schwimmgeschwindigkeit beibehalten, die der Strömung entspricht. In einer natürlichen Umgebung wie einem Fluß würde dies den Roboter davor bewahren, stromabwärts geschwemmt zu werden, wenn er sich nicht vorwärts bewegt.
In dem einsehbaren Bericht ,Tunable stiffness enables fast and efficient swimming in fish-like robots’, der im August 2021 veröffentlicht wird, belegen UVA-Prof. Dan Quinn und seine Gruppe, daß Roboter viel effizienter schwimmen können, wenn sie die Steifigkeit ihrer Schwänze anpassen. Echte Fische können ihre Schwanzmuskeln versteifen, um bei hoher Geschwindigkeit optimal zu sprinten, oder lockern, um bei niedriger Geschwindigkeit besser zu gleiten und zu manövrieren.
Da es sehr schwierig ist festzustellen, ob und wann Fische tatsächlich ihre Schwanzsteifigkeit ändern, entwickeln Quinn und der Postdoktorand Qiang Zhong ein theoretisches Modell der Strömungsdynamik und Biomechanik, das besagt, daß die Schwanzsteifigkeit mit dem Quadrat der Schwimmgeschwindigkeit zunehmen sollte. Um ihre Theorie in der Praxis zu testen, bauen die Wissenschaftler einen Roboter-Thunfisch mit dem Namen AutoTuna.
Das Gerät nutzt eine programmierbare Sehne, um die Steifigkeit seines Schwanzes automatisch zu verändern, während es in einem Wasserkanal im Labor schwimmt. Es erweist sich, daß der AutoTuna über einen größeren Geschwindigkeitsbereich schwimmen kann als ein ansonsten identischer Roboter mit fester Schwanzsteifigkeit, und daß er dabei nur fast halb so viel Energie verbraucht.
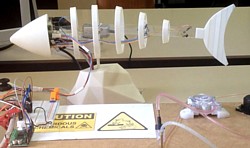
Im August 2012 folgt mit dem Mola des
US-Technologie-Unternehmens AeroVironment
Inc. mit Sitz in Virginia, das speziell im Bereich der
unbemannten Luftfahrzeuge sowie der Elektromobilität tätig ist, ein
besonders eigener und interessanter Nachbau eines Fisches - wenn
auch nicht von der Form her. Vorbild ist der gleichnamige, flache
und etwas bizarr aussehende Mola mola (Ranzania laevis),
der auch als Ozean-Sonnenfisch bekannt ist und die Angewohnheit hat,
an die Oberfläche zu kommen und sich auf die Seite zu rollen, um
sich in der Sonne zu sonnen.

Auch der Mola-Roboter, der gegenwärtig nur einen Konzeptnachweis darstellt, steigt an die Oberfläche, um Sonnenstrahlen einzufangen - in seinem Fall jedoch, um die integrierten Solarzellen zu nutzen. Da er über keine Batterien verfügt, fließt die von den PV-Zellen gesammelte Energie direkt in die Stromversorgung der zwei seitlich angebrachten Flossen. Um die Energiemenge zu erhöhen, kann zudem ein flexibler Schwanz mit verknüpften Solarzellen verwendet werden. Die gewonnene Energie wird auch von einem Datenlogger an Bord genutzt, der die lokalen physikalischen, chemischen und biologischen Wasserbedingungen aufzeichnet.
Der Konzeptroboter hat eine Reisegeschwindigkeit von ca. 4 km/h und soll unter der Wasseroberfläche schwimmen, wenn er nicht gerade Sonnenergie aufnimmt. Wie er das ohne Batterie macht, ist nicht ganz klar, obwohl verschiedene Solarzellenarten auch Strom erzeugen, wenn sie unter Wasser angebracht sind. Ob dies genug ist, um den Mola am Schwimmen zu halten, ist allerdings fraglich. Übrigens erreichen die natürlichen Vorbilder eine Länge von bis zu 3,30 m und eine Masse von 2,3 Tonnen. Über eine Weiterentwicklung des eigentlich hochinteressanten Nachbaus ist später nichts zu finden.
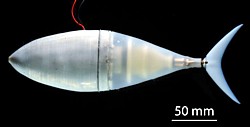
Im September 2012 folgen Berichte über den batteriebetriebenen
und per Laptop fernsteuerbaren Roboterfisch BIOswimmer,
der mit verschiedenen Arten von Nutzlasten ausgestattet werden kann,
in der Regel Sensoren. Der BIOSwimmer, der von Boston Engineering
Corp. in Waltham, Massachusetts, gebaut und vom Department
of Homeland Security (DHS) finanziert wurde, ist ein unbemanntes Unterwasserfahrzeug,
das in einem biomimetischen Verfahren einem Thunfisch nachempfunden
wurde.

Der BIOSwimmer verfügt über einen batteriebetriebenen Bordcomputer, der für Navigation, Sensorverarbeitung und Kommunikation eingesetzt wird, während die Außenhülle ein flexibles Heckteil aufweist. Angemessen plazierte Brust- und andere Flossen verleihen ihm eine hohe Manövrierfähigkeit, und die Einheit wird von einem Bediener mit Laptop ferngesteuert. Der Roboter verfügt außerdem über austauschbare Sensoren, die es ermöglichen, ihn für jeden Einsatz individuell zu konfigurieren.
Sein Hauptzweck im Verteidigungsbereich ist die Inspektion von Objekten in schwierigen Situationen: Er soll feststellen, ob Pumpen in öligem Wasser funktionieren, Häfen und Piers auf Bomben untersuchen, überflutete Schiffe erkunden und andere Sicherheitsaufgaben erfüllen. In einem Video ist zu sehen, wie agil sich das Gerät durchs Wasser bewegt.

(Grafik)
Im Oktober 2012 berichten Wissenschaftler der Eidgenössischen Technischen Hochschule Zürich (ETH Zürich), daß sie festgestellt haben, daß einige der natürlichen Eigenschaften der Meeresschildkröte einen ziemlich guten Roboter ergeben. Bei dem naro - tartaruga, der sich seit 2010 in der Entwicklung befindet, handelt sich um eine Forschungsplattform, die das Konzept des Flossenantriebs testet.
An der ETH Zürich hatte der Maschinenbau-Student und spätere Projektleiter Cédric Siegenthalers bereits 2009 einen rund 12 kg schweren und 95 cm langen Roboter-Thunfisch namens naro (nautical robot) entwickelt, der im Zürichsee ,ausgesetzt’ werden sollte. Zuvor mußte er allerdings eine Ultraschallsteuerung bekommen, damit die 30 m langen Steuerungskabel entfallen können, die ihn in seiner Bewegungsfreiheit noch beträchtlich behindern. Mit seinem Schwanzflossen-Antriebssystem als einziges bewegliches Teil kann er mit 1 - 2 m/s schwimmen.
Der neue naro - tartaruga ist mit einer geschätzten Höchstgeschwindigkeit von 2 m/s ebenfalls recht schnell und zudem ausgesprochen wendig, da sich die beiden vorderen Flossen unabhängig voneinander bewegen können. Dabei wird jede Flosse von drei 200 W Aktuatoren gesteuert, was zusammen mit zwei hinteren 15 W Aktuatoren eine Bewegung in drei Dimensionen und ein erstaunlich lebensecht wirkendes Schwimmen ermöglicht. Die Schlagfrequenz beträgt 2 Hz.
Das andere natürliche Merkmal der Schildkröten, das genutzt wird, ist ihr großer gewölbter Panzer, der bei dem Roboter mit Aluminiumrumpf zur Unterbringung einer Vielzahl von Sensoren und anderer Elektronik verwendet wird. Dazu gehören neben Druck-, Temperatur-, Wasserleckage- und Wasserdurchflußsensoren sowie Kreisel, Oberflächen-GPS und Kompaß ein i7-Dual-Core-Prozessor, ein 32 Ah Lithium-Polymer-Akkupack sowie ein BlueFox-Computer-Vision-System. Alles zusammen soll ein Gewicht von etwa 75 kg erreichen und in einen Körper von etwa 1 m Länge passen.

des naro - tartaruga
Obwohl es möglich ist, den aktuellen Prototyp per Fernsteuerung zu bedienen, wird der naro - tartaruga in erster Linie als Übung für die autonome Unterwassernavigation entwickelt. Im November macht der naro - tartaruga seinen ersten Tauchgang, allerdings noch ohne eine richtige Hülle, die seine interne Elektronik schützt und seine Form stromlinienförmig macht.
In Zukunft soll der Roboter als Forschungsobjekt für die autonome Unterwassernavigation dienen und mit austauschbaren Köpfen mit verschiedenen Sensoren ausgestattet werden, wobei er eine Tauchtiefe von 100 m erreichen soll. Dank seiner flossenbasierten Fortbewegung, die weniger Lärm verursacht als der Einsatz von Propellern, und seines natürlichen Aussehens ist er ideal für die Untersuchung von Unterwasser-Ökosystemen wie Korallenriffen.
Berichten im Juni 2013 zufolge wurden derweil als jüngste Roboterfische im Rahmen des naro-Projekts eine neue Art relativ kostengünstiger als auch hochgradig anpaßbarer biologisch inspirierter Unterwasserroboter entwickelt, die Schülerinnen und Schülern im Alter von 10 - 18 Jahren Technik und Biologie näherbringen sollen. Dank der finanziellen Unterstützung der Schweizerische Akademie der Technischen Wissenschaften (SATW) dauerte es nur vier Monate, um die von Stefan Bertschi aufgebrachte Idee in einen Bausatz-Prototypen umzusetzen.
Der Körper des naro-nanin besteht aus einem eloxierten Aluminiumrahmen, der ein Polycarbonatrohr umgibt. Im Inneren befindet sich eine Plexiglasstruktur mit einem Raspberry Pi, einem Li-Po-Akku, der etwa zwei Stunden lang hält, und einer Pumpe, die eine Tauchflasche füllt. Das ganze Paket wiegt 7 kg und ist 50 cm lang. Der Bausatz wird mit einem Satz Flossen geliefert, aber die Schüler können auch ihre eigenen Flossen anfertigen. Durch Ändern der Größe und Form der Flossen und deren Plazierung an einer beliebigen Stelle des Roboterkörpers können so verschiedene ,Arten’ erstellt werden.
Die Flossen sind mit vier aufsteckbaren Aktuatormodulen verbunden, die zwei Standard-Hitec-Servomotoren für Flügelschlag und Flossenrotation enthalten. Die Schüler können damit experimentieren und herausfinden, wie sich Größe, Form und Plazierung der Flossen auf die Geschwindigkeit und Steuerung des Roboters auswirken. Derzeit wird der Roboter mit einem Bluetooth-Gamepad ferngesteuert, aber es ist auch schon ein Kameramodul in Arbeit, mit dem man den Roboter aus einer FPV-Perspektive navigieren kann. Der naro-nanin-Roboter soll letztlich 2.000 - 2.500 $ kosten, je nachdem, was in den endgültigen Spezifikationen enthalten ist.
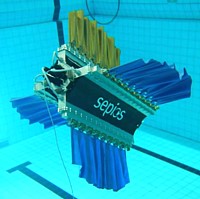
Eine andere Gruppe von Maschinenbaustudenten der ETH Zürich befaßt sich mit der Entwicklung eines Tintenfisch-Roboters. Der im Mai 2014 erstmals der Öffentlichkeit vorgestellte Sepios entspricht den Tieren, die sich mit einem Paar wellenförmiger Flossen vorwärts und rückwärts bewegen, sich auf der Stelle drehen oder an Ort und Stelle schweben.6131kb_sepios_robot_eth.jpg
Allerdings fügt das Team einen zusätzlichen Satz Flossen hinzu, mit denen sich der Unterwasserroboter auch gerade nach oben und unten bewegen kann. Jede der nun vier Flossen enthält neun Strahlen, von denen jeder einen Bewegungsbereich von 270° hat und durch einen eigenen Servomotor aktiviert wird. Diese Flossen sind mit einem zentralen Körper verbunden, der eine mechanische Schwimmblase enthält, die es dem Roboter ermöglicht, eine bestimmte Tiefe zu halten, indem er seinen Auftrieb anpaßt.
Zu den weiteren Bestandteilen dieses Körpers gehören eine Videokamera für Live-Streaming, ein Wasserdruck-/Tiefensensor, ein Laser-Entfernungsmesser, ein Beschleunigungsmesser sowie ein Gyroskop und ein Magnetometer, die für die Lageregelung verwendet werden. Der gesamte Roboter besteht aus 4.700 Einzelteilen, ist 70 cm lang, hat eine Flossenspannweite von 95 cm und wiegt 22,7 kg. Mit einer Ladung seines 20.000 mAh Akkus kann Sepios 90 Minuten lang arbeiten und dabei bis zu 10 m tief hinabtauchen. Weitere Details lassen sich der Projekthomepage sepios.org entnehmen.

Im Zuge der Recherchen ist zu erfahren, daß auch Stephen Licht, ein Student des o.e. MIT-Prof. Triantafyllou jahrelang an der Woods Hole Oceanographic Institution (WHOI) an einer robotischen Schildkröte namens Finnegan gearbeitet hat, bevor er sein Studium im Juni 2008 mit einem Doktortitel in Ozeanographie und Maschinenbau abschloß.
Der etwa 227 kg schwere und bis zu 2,4 m/s schnelle Schildkröten-Roboter besitzt vier Flossen als Antrieb, die sich im Wasser rollen und verdrehen. Dadurch erreicht er eine hohe Wendigkeit, kann schnell die Richtungen ändern, enge Kurven, Rückwärtsbewegungen und Loopings ausführen und ist ideal für unruhige und komplexe Umgebungen wie Korallenriffe oder Küstennähe, wo Wendigkeit und Präzision entscheidend sind. Finnegan gilt als das erste System, das vollständige Schildkrötenbewegungen nachahmt, wurde danach aber nicht weitergeführt.
Wissenschaftler der Stanford University melden im
Mai 2013, daß sie einen kleinen, von einem fliegenden
Fisch inspirierten Roboter entwickelt haben, der sich weiter
durch die Luft bewegen kann als ein vergleichbarer Sprungroboter, da
das Gleiten die energieeffizienteste Art der Fortbewegung ist. Das
Fluggerät - das hier nur peripher aufgeführt wird - kann außerdem seinen
Abschußwinkel je nach Untergrund anpassen, um sich anmutig zu bewegen
und zu landen, ohne dabei an Weite einzubüßen.
Um den Luftwiderstand zu verringern, sind die Flügel schwenkbar gestaltet, so daß sie sich der Flugrichtung anpassen können. Sobald der Roboter nach dem Start seine maximale Höhe erreicht, werden die Flügel mit Hilfe von Magneten am Körper fixiert. Beim Abstieg rasten sie dann wieder ein, um weiter zu gleiten. Der Rahmen ist aus Balsaholz und einem Schaumflügel aus Kohlefaser hergestellt, um das Gewicht zu reduzieren.
Das Team experimentiert mit der Fluggeschwindigkeit, um die effizienteste Flügelform und -länge zu finden, ebenso wie den optimalen Startwinkel. Dabei stellt sich heraus, daß die besten Starts bei 58° und 45° gelingen. Der Flügel des 30 g schweren und noch recht rudimentär wirkenden Prototyps hat eine Spannweite von 70 cm. Derzeit ist der Gleiter noch nicht völlig autonom, und seine Feder muß manuell gespannt werden. Ebenso ist der Prototyp noch nicht mit Solartechnik ausgestattet.
Auf der IEEE International Conference on Robotics and Automation (ICRA) im Mai 2013 in Karlsruhe präsentiert ein Team der griechischen Foundation for Research and Technology-Hellas (FORTH) um Dimitris P. Tsakiris, dem auch Michael Sfakiotakis von der Hellenic Mediterranean University, Asimina Kazakidi von der University of Strathclyde sowie Nikolaos Pateromichelakis von der McGill University angehören, eine Studie mit dem Titel ,Octopus-inspired Eight-arm Robotic Swimming by Sculling Movements’, in der untersucht wird, welche Bewegungsabläufe am effektivsten sind, um einen Roboterkraken durch das Wasser zu treiben.
Die Roboterforscher experimentieren dabei mit einigen Schwimmtechniken, wie sie echte Kraken nie zeigen, denn die einzige Gangart, die Kraken tatsächlich benutzen, ist der Rudergang, bei dem sich alle acht Arme synchron bewegen. Allerdings erzeugen einige der künstlichen Gänge viel sanftere Bewegungen, was für von Kraken inspirierte Roboter sinnvoller sein könnte.

Auf der IEEE International Conference on Intelligent Robots and Systems (IROS) im September 2014 in Chicago folgt dann eine Arbeit mit dem Titel ,Multi-arm Robotic Swimming With Octopus-Inspired Compliant Web’, in welcher über einen Schwimmroboter berichtet wird, der im Rahmen des europäische Forschungsprojekts Octopus entwickelt wurde.
Durch die Hinzufügung eines weichen und geschmeidigen Silikonnetzes, das dem Netz zwischen den Tentakeln der biologischen Version des Krake entspricht, ließ sich die Geschwindigkeit des Robooctopus fast verdoppeln. Außerdem bringen die Wissenschaftler dem Kraken auch bei, zu kriechen, Gegenstände zu tragen und frei und völlig selbständig in der Ägäis zu schwimmen.
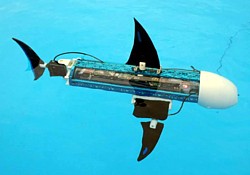
Im Juni folgen Meldungen über ein Forscherteam der National
University of Singapore (NUS) um Prof. Xu Jianxin,
das einen Roboterfisch entwickelt hat, der die Bewegungen eines Karpfens nachahmt,
obwohl er bislang eher wie eine unzusammenhängende Rakete aussieht.
Das autonome Unterwasserfahrzeug kann so programmiert werden kann,
daß es bestimmte Funktionen ausführt, z.B. für die Unterwasserarchäologie,
für militärische Aktivitäten, für die Erkennung von Pipeline-Lecks
oder die Verlegung von Kommunikationskabeln.

der NUS
Dem Team zufolge war es eine große Herausforderung, die Fortbewegung eines echten Karpfens auf den Roboter zu übertragen, da Fische viele verschiedene Muskeln benutzen, um sich fortzubewegen. Damit sich der Roboter auf die gleiche Weise bewegen kann, waren daher viele Aktuatoren erforderlich. Eine weitere Herausforderung bildete die Wasserdichtigkeit des Fischkörpers, des Motors und des Steuergehäuses.
Bei den flexiblen Flossen und Schwänzen entscheidet sich das Team für 1 mm dünne Acrylplatten, während der Auftrieb und das Gleichgewicht des Roboters durch beidseitig angebrachte Kunststoffschäume aufrechterhalten wird. Für den Tauchmechanismus ist der Roboterfisch mit einem internen Ballastsystem ausgestattet, um die Dichte zu verändern.
Bislang wurden zwei Fischroboter gebaut: Der größere Prototyp ist etwa 1,5 m lang, wiegt rund 10 kg und kann bis zu einer Tiefe von 1,8 m tauchen. Der kleinere ist hingegen etwa 60 cm lang und wiegt 1,5 kg. Er wurde für Untersuchungen zur 2D-Bewegungssteuerung und Bewegungsplanung auf kleinstem Raum entwickelt und kann nur an der Wasseroberfläche schwimmen. In Zukunft soll der Roboterfisch noch kleiner und realistischer gestaltet und mit Sensoren, GPS und einer Videokamera ausgestattet werden.

Schildkrötenroboter
(rechts)
Im Dezember 2014 stellt auch die NUS einen Schildkrötenroboter vor, der allerdings die Besonderheit hat, daß er seine Batterien auf See selbst aufladen kann. Außerdem ist nicht nur wendig, sondern auch in der Lage, seine Aufgaben zielstrebig zu erfüllen und dabei auf Anforderungen und Hindernisse selbständig zu reagieren. In naher Zukunft wäre es damit möglich, einen Schwarm autonomer winziger Roboter-Meeresschildkröten und -fische zu produzieren, die beispielsweise gefährliche Missionen wie das Aufspüren von Atommüll unter Wasser übernehmen könnten.
Der Roboter des Teams um Prof. S. K. Panda verwendet kein Ballastsystem für Tauch- oder Sinkfunktionen, so daß er viel kleiner und leichter ist und eine größere Nutzlast tragen kann. Die Fähigkeit, dynamisch zu tauchen oder vertikal zu sinken erlaubt ihm, auf dem Meeresboden auch in Tunnel oder Rohre mit sehr kleinem Durchmesser einzudringen. Wie eine echte Schildkröte schwimmt sie und vollführt mit Hilfe gezielter Paddelbewegungen ihrer Vorder- und Hinterflossen scharfe, schnelle Kurven.
Um die Dauer seiner Einsätze nicht auf eine Batterieladung zu beschränken, kann der Roboter die Batterie aufladen, indem er auftaucht und die integrierten Solarzellen nutzt. Den Forschern zufolge könnte er auch in der Lage sein, Strom zum Aufladen der Batterien zu erzeugen, indem er sich an einer Stelle des Meeresbodens niederläßt und dann die Kraft der Unterwasserströmungen ausnutzt.
Ein solches System wird bereits von einem kugelförmigen Roboter verwendet, der zuvor von dem Team entwickelt wurde und in seiner Struktur einem Kugelfisch ähnelt, aber eine Düsenantriebstechnik wie Quallen und Tintenfischen verwendet. Dieser Roboter kann in einen Schlafmodus versetzt werden, in dem nur die Überwachungssensoren aktiv sind, während eine Reihe von eingebauten Rotorblättern, die an einen Generator angeschlossen sind, Energie aus der Unterwasserströmung gewinnen.
Abhra Roy Chowdhury zufolge, der in den letzten drei Jahren im Rahmen seiner Doktorarbeit an der NUS Unterwasserroboter entwickelt hat, habe das Team noch drei weitere Roboterfische mit unterschiedlicher Morphologie entworfen. Hierzu wurden speziell der Gelbflossenthun und der Süßwasser-Maulbarsch untersucht, die als effiziente Schwimmer gelten. Für die nahe Zukunft ist die Entwicklung von Roboterfischen mit speziellen Aktuatoren als Muskeln geplant, die sich wie bei echten Fischen wellenförmig bewegen können.

Im Dezember 2017 veröffentlicht eine weiteres Team der NUS um die Professoren Chew Chee Meng und Yeo Khoon Seng ein Video mit Aufnahmen eines im Laufe von zwei Jahren entwickelten, elektrischen Unterwasserroboters, der die flache stromlinienförmige Form und die anmutigen Bewegungen eines Mantarochens nachahmt.
Während andere Unterwasserroboter, die die Schlagkinematik des Mantarochens imitieren, mehrere Motoren verwenden, um die Flossen aktiv zu bewegen, wird der MantaDroid von nur einem Elektromotor an jeder Flosse angetrieben. Um die nachfolgenden Bewegungen zu erreichen, läßt man die passive Flexibilität der Flossen auf natürliche Weise mit der Fluiddynamik des Wassers interagieren. Um das richtige Flossendesign zu finden, prüfte das Team 40 verschiedene Versionen, bevor es sich für eine flexible PVC-Folie entschied.
Der Körper des mattschwarzen MantaDroid ist mit einer Reihe von Sensoren und Erkennungsgeräten ausgestattet, so daß er unter Wasser Informationen sammeln kann. Mit einer Länge von 35 cm, einer Spannweite von 63 cm und einem Gewicht von nur 0,7 kg ist er in der Lage, bis zu zehn Stunden lang mit einer Geschwindigkeit von 0,7 m/s zu schwimmen. Details über den Motor oder den Akku sind nicht bekannt.
Das NUS-Team wird den MantaDroid als Nächstes in einer Meeresumgebung testen, um seine Schwimmleistung und -fähigkeit in verschiedenen Wassertiefen und unvorhersehbaren Unterwasserströmungen zu bewerten. Darüber hinaus wird daran gearbeitet, weitere Bewegungsmodi in den Flossenmechanismus des Roboters einzubauen.
Auf der 9. IFAC Conference on Control Applications in Marine Systems im September 2013 in Osaka legen Masahiko Mizui, Ikuo Yamamoto und Taishi Oka von der Kyushu Kyouritu University, der University of Kitakyushu und der Nagasaki University in Japan eine Arbeit vor, die hier unbedingt erwähnt werden soll, obwohl sie nichts mit Wasser zu tun hat. Die als pdf im Netz einsehbare Studie trägt den Titel ,Launch of Robotic Fish to the Space: Development of Autonomous Cleaning Robot in the International Space Station’ und beschreibt die Entwicklung eines autonomen Roboters zur Staubentfernung in der Internationalen Raumstation ISS.
Das Interessante ist nämlich, daß für den Reinigungsroboter im japanischen Experimentmodul KIBO, der die Aufgabe hat, den Staub aufzusammeln, der von der ISS-Klimaanlage nicht zurückgewonnen werden kann, eine Fischform mit elastischen Oszillationsflossen gewählt wird, um eine hohe Kontrollierbarkeit und ein ,weiches’ Verhalten zu erreichen. Der teilweise 3D-gedruckte Reinigungsroboter hat eine autonome Flugsteuerung und Navigation und weicht aus, wenn er die Astronauten, Wände und Hindernisse erkennt. Danach wird die Reinigungsarbeit in der Kabine sicher fortgesetzt. Die weiteren Details sind der o.g. Studie zu entnehmen.
Ein weiterer Unterwasser-Roboter, der einer Schildkröte nachempfunden ist, wird im November 2013 in der Ausstellung Robot Safari im Londoner Wissenschaftsmuseum vorgestellt. Der kostengünstige Roboter namens U-CAT ist eine Kreation des Designers Taavi Salumäe von der Technischen Universität Tallinn in Estland und ist Teil des von der EU finanzierten Forschungsprojekts ARROWS, dessen Ziel es ist, innovative neue archäologische Robotersysteme für die Weltmeere zu entwickeln. Die im Rahmen des Projekts entwickelten Technologien sollen in 3 - 5 Jahren im Mittelmeer und in der Ostsee erprobt werden.
Der U-CAT nutzt vier unabhängig voneinander angetriebene Flossen, um zu schwimmen, sich zu drehen und zu schweben. Er ist mit einer Kamera ausgestattet, die es den Forschern ermöglicht, Unterwasserstandorte auf der Grundlage von Videomaterial zu rekonstruieren. Da der Roboter keinen Propeller verwendet, kann er sich bewegen, ohne das Wasser um ihn herum zu stören oder Schlick aufzuwirbeln. Dank dieser besseren Sicht und seiner geringen Größe eignet er sich perfekt für die Erkundung von Orten, die für bestehende Unterwasserroboter zu klein sind, um in sie einzudringen.

Wie aus dem im März 2020 veröffentlichten und im Netz einsehbaren Bericht ,Salmon behavioural response to robots in an aquaculture sea cage’ hervorgeht, an dem auch Forscher der Norwegischen Universität für Wissenschaft und Technologie und der Estnischen Universität für Biowissenschaften beteiligt sind, wurde der U-CAT zwischenzeitlich erfolgreich eingesetzt, um Gehege der marinen Aquakultur auf Löcher und die Fische auf Krankheiten oder Parasiten zu untersuchen.
Wenn ein großer menschlicher Taucher zwischen den Zuchtfischen schwimmt und dabei Luftblasen ausstößt, geraten die Tiere in Streß, was wiederum zu gesundheitlichen Problemen führen kann. Das Gleiche gilt, wenn relativ schnell fahrende ferngesteuerte Fahrzeuge eingesetzt werden, wie z.B. ein Argus Mini ROV mit Schubdüsenantrieb. Auf der Suche nach einer fischfreundlicheren Alternative kamen Prof. Maarja Kruusmaa und ihre Kollegen auf den autonomen und leisen U-CAT.
Als das Team den Roboter in einem Lachsgehege in einer norwegischen Fischfarm testetet, bleiben die Fische ruhig und schwimmen sogar ganz nah an den Roboter heran. Laut Kruusmaa liegt das Erfolgsgeheimnis des U-CAT wahrscheinlich darin, daß er klein ist und sich langsam bewegt.
Überraschenderweise scheint die Tatsache, daß der Roboter wie ein Meerestier aussieht, überhaupt keine Rolle zu spielen, was aber als gute Nachricht betrachtet wird, da es die Entwicklung und den Einsatz von Robotern in diesem neuen Anwendungsbereich billiger machen wird, wenn diese nicht so gebaut werden müssen, daß sie wie Fische oder Schildkröten aussehen. Es ist aber nicht festzustellen, daß sich diese Erkenntnis inzwischen herumgesprochen hat.

Um 2013/2014 wird als Teil eines Rapid-Prototyping-Projekts im Rahmen des Programms Silent NEMO der US-Marine ein unbemanntes Unterwasserfahrzeug entwickelt, das den Namen GhostSwimmer erhält. Seine Bio-Mimikry soll zusätzliche Sicherheit bei ISR-Einsätzen (Intelligence, Surveillance and Reconnaissance) mit geringer Sichtweite und bei der Inspektion von Schiffsrümpfen bieten und gleichzeitig leiser sein als propellergetriebene Fahrzeuge. Hersteller ist wiederum die Boston Engineering.
Nach erfolgreichen Tests mit der rund 1,5 m langen und 45 kg schweren Hai-ähnlichen Drohne werden 2014 diverse Video veröffentlicht. Dank leistungsfähiger Batterien kann die Drohne autonom unterwegs sein, läßt sich aber auch über eine rund 150 m lange Kabelverbindung an ein Laptop andocken und steuern. Dabei soll sie sowohl in flachem Wasser operieren können als auch Tauchtiefen bis zu rund 90 m meistern.
Bei den Tests sammelt der GhostSwimmer vor allem Informationen über Gezeiten, Strömungen und Wetterbedingungen. Über weitere Schritte bei der Entwicklung oder über etwaige Einsätze wird die Öffentlichkeit aber nicht mehr informiert.

(Grafik)
Im Mai 2015 wird berichtet, daß die NASA 15 Projekte fördert, die neue Roboter für die Raumfahrt entwickeln. Dazu gehört auch ein Modell, das dem schlangenartigen Aal nachempfunden ist und in Zukunft amphibisch den vermutlich aus flüssigem Wasser bestehenden Ozean unter der kilometerdicken Eisschicht des Jupiter-Mondes Europa erkunden soll.
Der Roboteraal ist als Soft-Robot konzipiert und soll eine besondere Methode zur Energiegewinnung nutzen, da sein Einsatzort zu weit von der Sonne entfernt ist, als daß Solarzellen sinnvoll wären. Statt dessen hat der Roboter eine Antenne auf dem Rücken, mit deren Hilfe er elektrische Energie aus lokalen Änderungen des Magnetfeldes gewinnt. Die Entwicklung und Funktion des Amphibienroboters wird ausführlich im Kapitel Micro Energy Harvesting unter Magnetfeld dargestellt (s.d.).
Ein großes Wissenschaftlerteam der University of California, San Diego, der Michigan State University und der Université de Montpellier legt im Juni 2015 eine Studie mit dem Titel ,3D-Printed Artificial Microfish’ vor, die kaum sichtbare Mikro-Roboterfische betrifft, die nur 120 µm lang und 30 µm breit sind - und damit kleiner als ein menschliches Haar. Die komplexen Mikro-Schwimmer aus dem 3D-Drucker sollen aber trotzdem viel Arbeit leisten, indem sie Giftstoffe aus dem Wasser filtern.

Um vorwärts zu kommen haben die Mikro-Schwimmer einen chemischen Antrieb: Ihre Flossen werden mit Aluminiumpartikeln versetzt, die mit Wasserstoffperoxid in Flüssigkeiten reagieren und sich dadurch in Bewegung setzen. Für die Steuerung werden in den Köpfen magnetische Eisenoxid-Nanopartikel installiert, so daß die Fische ihr Ziel mit Hilfe von Magneten ansteuern können.
Für die Herstellung der Roboter-Fische, die auch unterschiedliche Designs haben können, hat das Team um den Nanoingenieur Shaochen Chen eine schnelle und hochauflösende 3D-Druck-Technik entwickelt, die sich Microscale Continuous Optical Printing (µCOP) nennt. Damit können innerhalb von Sekunden Hunderte von Fischen gedruckt werden. Die Forscher verwenden hierbei lichtempfindliches Material, das Schicht für Schicht aufgebaut wird und dann durch UV-Licht aushärtet, wobei das Druckmaterial mit giftneutralisierenden Nanopartikeln gespickt wird.
Als die Roboter-Fische in eine verseuchte Flüssigkeit gelegt werde, fangen sie während des Entgiftungsprozesses an rot zu leuchten. Man könnte sie daher auch zum Aufspüren von Toxinen einsetzen, sogar innerhalb des menschlichen Körpers, wo die möglicherweise Dienste als chirurgische Roboter leisten könnten. Bis die Mikro-Objekte reif sind für die Praxis, wird es den Forschern zufolge aber noch dauern.

der Roboter-Aale
Im April 2016 berichtet die Presse über einen Roboter-Aal, der im Zuge einer Zusammenarbeit zwischen der Norwegischen Universität für Wissenschaft und Technologie (NTNU), dem im Vorjahr gegründeten NTNU-Spin-Off Eelume, der Firma Kongsberg Maritime und dem Öl- und Gaskonzern Statoil entwickelt wurde, um in Zukunft Unterwasserkabel inspizieren und andere unter der Wasseroberfläche anfallende Arbeiten zu übernehmen.
Nun unterzeichnen die Partner eine Vereinbarung, um die neue Technologie, die die Kosten für Unterwasserinspektion, -wartung und -reparatur erheblich senken wird, in die Praxis zu überführen. Die NTNU und die unabhängige Forschungsorganisation SINTEF forschen übrigens seit mehr als zehn Jahren auf dem Gebiet der Schlangenrobotik.

Die Eelume-Roboter sollen zukünftig dauerhaft auf dem Meeresboden an einer Dockingstation installiert werden, um geplante und bedarfsgesteuerte Inspektionen und Eingriffe durchzuführen. Ihr schlanker und flexibler Körper ermöglicht den Zugang zu begrenzten Bereichen, die für konventionelle Unterwasserroboter nur schwer zugänglich sind. Die Roboter können zudem wie eine echte Seeschlange selbständig schwimmen oder sich mit Hilfe von Triebwerken fortbewegen und große Entfernungen zurücklegen.
Technische Details werden nicht bekanntgegeben, auf dem Konzeptvideo ist allerdings zu sehen, daß der schlangenartige Körper noch an Stromkabeln hängt, die in Zukunft aber abgeschafft werden sollen.
Auf der aktuellen Homepage der Eelume werden autonome ,All-Terrain’-Unterwasserfahrzeuge beworben, die allerdings mehr wie U-Boote aussehen, während der Roboter-Aal inzwischen als modulare Plattform unter dem Namen Eelume 500M angeboten wird (Stand 2025). Die 250 - 600 cm langen Roboter mit einem Durchmesser von 20 cm, die in der Luft 70 - 180 kg wiegen, können bis in eine Tiefe von 500 m abtauchen, erreichen eine Geschwindigkeit von bis zu 2 Knoten und haben eine Ausdauer von bis zu acht Stunden.
UPM und UNIFI
Von der Universidad Politecnica de Madrid (UPM) und der Università degli Studi di Firenze (UNIFI) erscheint im August 2016 die Studie ,Bio-inspired fish robot based on chemical sensors’ über die Konstruktion eines biologisch inspirierten autonomen Roboters, der speziell zur Überwachung des pH-Werts in Aquakulturen entwickelt wurde, in denen etwa 50 % der weltweiten Meeresfrüchte gezüchtet werden.
Die Kontrolle des pH-Werts ist wichtig, da er einen Hinweis auf den Säuregehalt des Wassers gibt und andere Faktoren der Wasserqualität beeinflussen kann. Saureres Wasser kann bei Fischen zu Streß und Krankheiten führen. Der Unterwasserroboter ist daher so konzipiert, daß er einen Fisch nachahmt und sogar seine Bewegungen an die Wasserqualität anpaßt, um Bereiche mit abnormalen Bedingungen zu erkennen.
Mit einer Länge von 30 cm (ohne Schwanz) verwendet der Roboter Aktuatoren aus einer Formgedächtnislegierung, um ein Rückgrat aus 1 mm dickem Polycarbonat zu biegen, das mit einer Haut aus Latex umhüllt ist, in die Rippen für die strukturelle Stabilität eingefügt sind. Zur Bewegung wird dieses System von einem speziellen Sensor gesteuert, der einem elektrisch leitfähigen Polyanilinfilm auf einer Graphitelektrodenoberfläche besteht und den pH-Wert in der Umgebung überwacht. Diese chemischen Informationen wird dann in ein elektronisches Signal umgewandelt, das die Schwimmuster des Roboters bestimmt.
Im Januar 2017 wird
über Forscher der Scripps Institution of Oceanography an der University
of California San Diego um
Prof. Steven Morgan berichtet, die einen Schwarm kleiner
Unterwasserroboter entwickelt haben, um Meeresströmungen zu untersuchen
und die Bewegungen des Planktons - der häufigsten Lebensform im Meer
- zu verstehen. Die M-AUE (miniature autonomous underwater
explorer) genannten autonomen Unterwasserforscher sollen mit ihren
Temperatur- und anderen Sensoren kleinräumige Umweltprozesse im Ozean
untersuchen.

(Grafik)
Durch das von Jules Jaffe erfundene, eher wie eine Flasche aussehende Roboterplankton, das mit den Meeresströmungen treibt, aber so programmiert ist, daß es sich durch Anpassung seines Auftriebs auf und ab bewegt und so die Bewegungen des Planktons nachahmt, sollen Theorien darüber getestet werden, wie Plankton dichte Flecken unter der Meeresoberfläche bildet, die sich später oft als schädliche, rote Flut an der Oberfläche zeigen. Das Team hatte 2009 von der National Science Foundation (NSF) fast 1 Mio. $ für die Entwicklung und Erprobung der neuen Art von Meereserkundungsinstrumenten erhalten.
Bei ihrem Versuch Mitte 2015 setzen die Wissenschaftler um Paul Roberts auf einer Fläche mit einem Durchmesser von 300 m einen Schwarm von 16 Exemplaren der grapefruitgroßen Unterwasserrobotern ein, die so programmiert sind, daß sie 10 m tief im Ozean bleiben. Während des fünfstündigen Experiments passen die M-AUEs ihren Auftrieb ständig an, um sich vertikal gegen die von den internen Wellen erzeugten Strömungen zu bewegen. Dabei zeigen die alle zwölf Sekunden erfaßten dreidimensionalen Positionsdaten, wo sich der Roboterschwarm unter der Meeresoberfläche bewegt.
Für die kontrollierte Bewegung in der Wassersäule besitzen die Roboter ein aktives Auftriebssystem (buoyancy control). Im Gehäuse der M-AUE befindet sich ein kleiner Schubkolben, der das Volumen des Fahrzeugs minimal verändern kann. Durch das gezielte Vergrößern oder Verkleinern des Körpervolumens bei konstanter Masse wird die Dichte verändert, wodurch der Roboter gezielt auf- oder abtauchen kann. Die Energie des integrierten Akkus reicht dabei für Missionen von mehreren Tagen.

Das Experiment bestätigt, daß frei schwimmendes Plankton die physikalische Dynamik des Ozeans - in diesem Fall interne Wellen - nutzen kann, um seine Konzentration zu erhöhen und sich zu Schwärmen im warmen Wasser der internen Wellentäler zusammenzuschließen, um seine grundlegenden Lebensbedürfnisse zu erfüllen.
Die M-AUEs könnten in Zukunft in Schwärmen von Hunderten bis Tausenden eingesetzt werden, um einen 3D-Blick auf die Wechselwirkungen zwischen Meeresströmungen und Meereslebewesen zu erhalten und Ölverschmutzungen zu verfolgen. Die eingebauten Hydrofone, mit deren Hilfe die M-AUEs unter Wasser verfolgt werden können, könnten es dem Schwarm auch ermöglichen, wie ein riesiges ,Ohr’ im Ozean zu wirken, das die Umgebungsgeräusche im Ozean hört und lokalisiert.
Bei einer vertiefenden Recherche zeigt sich, daß dieser Ansatz frühe Vorläufer hat. Demnach hat das Professorenehepaar Donna und Tom Wolcott von der North Carolina State University im Laufe von drei Jahrzehnten einen Roboter entwickelt, der seine Umgebung wahrnimmt, die vertikalen Schwimmbewegungen der Larven nachahmt und seinen Standort übermittelt. Einige der ersten Roboter namens ABLE (Autonomous Behaving Lagrangian Explorer) wurden bereits 1994 auf den Bahamas getestet - und Morgan trifft die Wolcotts zum ersten Mal auf einer Konferenz 1996, als sie einen ABLE-Prototyp in einem Hotelpool vorführen. Alles Weitere ist Geschichte.
Die Robotikforscher der École Polytechnique Fédérale de Lausanne (EPFL), die im Laufe der Jahre diverse von Tieren inspirierte Droiden entwickelt haben, stellen im Juli 2017 einen Roboteraal vor, der sich durch verschmutztes Wasser schlängelt, um die Quelle der Verunreinigung zu finden.

Der Envirobot kann ferngesteuert werden oder autonom schwimmen, ist 1,5 m lang und besteht aus einzelnen Modulen, die jeweils einen kleinen Elektromotor enthalten. Diese Motoren verändern die Krümmung des Roboters, so daß er sich geschmeidig durch das Wasser schlängeln kann, ohne Schlamm aufzuwirbeln oder Wasserlebewesen zu stören.
Einige dieser Module enthalten Sensoren, um Dinge wie Leitfähigkeit und Temperatur zu messen, während andere Kammern enthalten, die sich mit Wasser füllen können. Diejenigen, die sich mit Wasser füllen, beherbergen auch Bakterien, kleine Krebstiere und Fischzellen, die als biologische Sensoren dienen. Indem beobachtet wird, wie diese Organismen auf das eintretende Wasser reagieren, läßt sich herausfinden, welche Art von Schadstoffen im Wasser enthalten und wie giftig sie ist.
Das Team um Prof. Jan Roelof van der Meer testet den Envirobot im Genfer See, wo seine Fähigkeit belegen soll, Veränderungen in der Wasserleitfähigkeit zu erkennen. Indem in ein bestimmtes Gebiet in Ufernähe Salz gepumpt wird, gelingt es dem Roboter, die durch das Salz verursachten Schwankungen der Leitfähigkeit zu kartieren und eine Temperaturkarte des Gebiets zu erstellen. Weitere Tests mit den biologischen Sensoren und echten Verunreinigungen sind allerdings noch in weiter Ferne. Letztendlich soll der Envirobot entweder einem vorprogrammierten Pfad oder der Richtung der zunehmenden Wassertoxizität folgen, um die Quelle der Verschmutzung selbständig ausfindig zu machen.
Ein weiteres Team der EPF) berichtet im November 2017, daß es einen Roboter-Imitator so erfolgreich in Zebrafischschwärme integriert hat, daß der Roboter das Verhalten der ganzen Gruppe steuern kann.
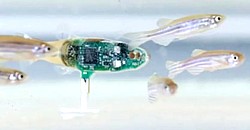
Der als ,soziales Experiment’ betrachtete Roboter ist als ,Geheimagent’ konzipiert, der sich in Fischschwärme integriert, um zu lernen, wie ein echter Fisch zu kommunizieren und sich zu bewegen (,How mimetic should a robotic fish be to socially integrate into zebrafish groups?’).
Damit der Roboter-Zebrafisch die ,Aufnahmeprüfung’ der Schule besteht, wird er in der gleichen Farbe, Form, Proportion und mit dem gleichen Streifenmuster gebaut wie ein echter Zebrafisch, ist mit 7 cm Länge allerdings etwas größer. Der Roboter ist an einer Stange befestigt, die mit einem Sockel am Boden des Aquariums verbunden ist, welcher magnetisch mit einem kleinen Motor verbunden ist, der unter dem Becken herumfährt und den Roboter durch das Wasser zieht. Um den Eindruck zu erwecken, daß er schwimmt, schlägt sein Schwanz hin und her.
Das Team testet den Robofisch mit zehn verschiedenen Schwärmen von Zebrafischen in Aquarien mit Labyrinthen aus Räumen und Gängen und zeichnet die Bewegungen des Schwarmes als Ganzes und die der einzelnen Fische auf und wie gut sich der Roboter in die Tiere einfügt. Es stellt sich heraus, daß Schulen mit Roboterfischen im Wesentlichen genauso funktionieren wie völlig natürliche Schulen. Die Fische nehmen den Roboter problemlos in ihren Schwarm auf - und der Roboter ist auch in der Lage, das Verhalten der Fische zu beeinflussen, indem er sie auffordert, die Richtung zu ändern oder von einem Raum zum anderen zu schwimmen.
Im August 2021 veröffentlicht eine andere Gruppe der EPFL gemeinsam mit der japanischen Tohoku University, dem französischen Institut Mines-Télécom Atlantique und der kanadischen Université de Sherbrooke den Bericht über die Entwicklung eines weiteren aalähnlichen Schwimmroboters, der diesmal vom Neunaugenfisch inspiriert ist. Während die bisherigen Roboter in der Regel einfach nur die Bewegungen ihrer biologischen Vorbilder nachahmen, nutzt der AgnathaX genannte Schwimmer jedoch simulierte zentrale und periphere Nervensysteme für eine robustere Leistung.

Bisher gingen Wissenschaftler davon aus, daß das zentrale Nervensystem (Gehirn und Rückenmark) für die Fortbewegung hauptverantwortlich ist, da es Signale erzeugt, die die Beine, Flossen oder Flügel eines Tieres in einem rhythmischen Muster bewegen. Andere glaubten hingegen, daß das periphere Nervensystem (Nerven, die die Extremitäten des Körpers mit dem Gehirn verbinden) eine größere Rolle spielt, da die Nerven in den sich bewegenden Gliedmaßen Rückkopplungssignale erzeugen, die den Rhythmus aufrechterhalten. Wie AgnathaX nachweisen kann, sind tatsächlich beide Nervensysteme für die Fortbewegung wichtig.
Der neue Gelenkroboter besteht aus zehn miteinander verbundenen Segmenten, von denen jedes einen Motor enthält, der die Rolle der Muskeln eines echten Neunauges übernimmt. Ein eingebauter Mikroprozessor fungiert als zentrales Nervensystem, indem er die Motoren nacheinander aktiviert, um eine wellenförmige Schwimmbewegung zu erzeugen. Kraftsensoren, die sich auf beiden Seiten jedes Segments befinden, simulieren das periphere Nervensystem, indem sie messen, wie stark das Wasser auf das Segment drückt, während es sich bewegt. Bei echten Neunaugen dienen druckempfindliche Zellen in der Haut demselben Zweck.
Als ein Bewegungsverfolgungssystem eingesetzt wird, um die Bewegungen des Roboters zu analysieren, während er durch ein Schwimmbecken schwimmt, stellen die Forscher um Kamilo Melo fest, daß der AgnathaX am besten funktioniert, wenn beide Nervensysteme zusammenarbeiten. Man hofft nun, daß die Ergebnisse zu robusteren Robotern führen - z.B. für Anwendungen wie Such- und Rettungseinsätze, zur Umweltüberwachung oder sogar zu verbesserten Behandlungen für menschliche Rückenmarksverletzungen. Der aktuelle Artikel trägt den Titel ,Emergence of robust self-organized undulatory swimming based on local hydrodynamic force sensing’, ist aber nicht einsehbar.
Im September 2017 erfolgt die Veröffentlichung eines
großen Teams der Beihang University, der Harvard
University und des Boston College um Prof. Li
Wen unter dem Titel ,A biorobotic adhesive disc for underwater
hitchhiking inspired by the remora suckerfish’. In der öffentlich einsehbaren
Studie wird untersucht, wie Remoras - auch bekannt als Saugfische oder
Schiffshalter (Echeneidae) - auf Haien, Rochen, Walen und
anderen Tieren mitreisen, um daraufhin ein Gerät zu entwickeln, das
dasselbe tut und das zur Erforschung von Meereslebewesen sowie zur
Erweiterung der Reichweite von autonomen Unterwasserfahrzeugen eingesetzt
werden könnte.
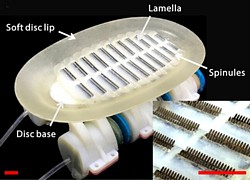
Haftscheibe
Prof. Jason Nadler am Georgia Tech Research Institute (GTRI) hatte bereits vor einigen Jahren begonnen, die einzigartigen Fähigkeiten von Remoras zu untersuchen. Diese benutzen ein scheibenförmiges, saugnapfähnliches Organ, um sich an den Meerestieren festzuhalten und sich dort von Parasiten, toter Haut und Nahrungsresten zu ernähren und sich gleichzeitig vor Raubtieren zu schützen. Li Wen wiederum hatte die Remoras zum ersten Mal im Jahr 2012 bemerkt, als er in Harvard an einer 3D-Drucktechnik für synthetische Haifischhaut arbeitete. In jenem Jahr beschrieb Nadler die morphologische Struktur und die Eigenschaften der Haftscheibe der Remoras detailliert in einer Studie (,Structures and Function of Remora Adhesion’).
Wen und sein Forscherteam entwickeln in der Folgezeit durch 3D-Drucken der Hauptstruktur der Scheibe, Laserbearbeitung von Stacheln aus Kohlenstoffasern und Anbringen dieser Stacheln an flexiblen Klappen oder Lamellen den Prototyp einer künstlichen Haftscheibe, die an glatten, rauhen und weichen Oberflächen haften kann - und an Haifischhaut.
Die künstliche Remora-Scheibe saugt sich mit ihrer flexiblen, nach außen gebogenen Lippe an einer Oberfläche fest, um nicht abgezogen zu werden, und ihre Stacheln aus Kohlefaser und ihre flexiblen Lamellen drücken gegen die Oberfläche, um Widerstand zu leisten und Scherkräfte zu vermeiden. In Laborexperimenten ist das Gerät im Durchschnitt innerhalb von vier Sekunden fest angebracht. Der nächste Schritt der Forscher ist die Entwicklung eines zuverlässigen Roboters, der sich unter Wasser reversibel an- und abkoppeln kann.
Im September 2018 publizieren Jennifer Frame, Nick Lopez, Oscar Curet und Erik D. Engeberg von der Florida Atlantic University und der Naval Surface Warfare Center Carderock Division die Studie ,Thrust force characterization of free-swimming soft robotic jellyfish’ über eine neue Robo-Qualle, um Korallenriffe und die dort lebenden Tiere zu untersuchen. Im Gegensatz zu anderen Unterwasserdrohnen ist das flexible, 20 cm breite und batteriebetriebene neue Gerät, das dem Aussehen der Mondqualle in ihrem Larvenstadium nachempfunden ist, weich und sanft und gleitet lautlos durch das Wasser, so daß es weder Riffe beschädigt noch die dort lebenden Tiere stört.
Das mit Sensoren ausgestattet Gerät hat acht Tentakel aus weichem Silikonkautschuk. Pumpen an der Unterseite des Roboters saugen Meerwasser an und leiten es in die Tentakel. Das Wasser bläst die Tentakel auf, so daß sie sich ausdehnen. Dann fällt die Stromzufuhr zu den Pumpen kurz aus, woraufhin sich die Tentakel entspannen und das Wasser aus Löchern an der Unterseite des Geräts entweicht. Dies treibt die Roboterqualle vorwärts und erzeugt eine naturgetreue Schlagbewegung.
Der Roboter hat außerdem ein hartes, zylindrisches Gehäuse auf der Oberseite, in welchem sich die Elektronik befindet, die die Qualle steuert, die Daten speichert und eine drahtlose Kommunikation ermöglicht, mittels der der Roboter aus der Ferne gesteuert werden kann, indem verschiedene Tentakel zu verschiedenen Zeiten in Bewegung gesetzt werden.
Insgesamt werden fünf Exemplare der weichen Roboterquallen mit acht pneumatischen Netz-Tentakelaktoren hergestellt, die sich radial von ihrer Mitte aus erstrecken. Sie sind in der Lage, frei und ungebunden im Ozean zu schwimmen, von einer Seite zur anderen zu steuern und durch Öffnungen zu schwimmen, die enger sind als der Nenndurchmesser der Qualle. Der Roboter befindet sich noch in der Entwicklung, eine neue Version soll tiefer schwimmen und mehr Sensoren tragen als das bestehende Modell.
Im Januar 2019 startet das vom BMBF geförderte Projekt Bionic RoboSkin, dessen Ziel die Entwicklung einer bionisch inspirierten, flexiblen ,Roboterhaut’ mit integrierten Sensoren ist, die sich für den Einsatz in der Robotik eignet. Die Projektlaufzeit endet im Dezember 2021, und im Juni 2022 erscheinen Berichte über die bisherigen Umsetzungen. Demnach hat ein Forschungskonsortium unter Beteiligung des Fraunhofer-Instituts für Zuverlässigkeit und Mikrointegration (IZM) und der Firma EvoLogics GmbH einen Unterwasser-Roboter entwickelt, der so wendig und beweglich ist wie ein Mantarochen.

des IZM
Dank der neu entwickelten, vernetzten Sensoren in seinen Flügelflächen kann er besonders viel Informationen aus der Umgebung erhalten und so z.B. die Metalldetektion von Objekten auf oder leicht vergraben unter dem Meeresboden ermöglichen. Dies betrifft in erster Linie die großen Mengen alter Kriegsmunition, die in den Weltmeeren lagern und Mensch und Tier gefährlich werden können - nicht zuletzt, wenn es um Bauvorhaben wie etwa Offshore-Windparks oder Tiefsee-Kabel geht.
Die feuchtedurchlässige und druckneutrale Sensorhaut, die über die die Flügel des Roboter-Rochens gezogen wird, besteht aus einem flexiblen Textilverbund, in den Sensorelemente sowie elektrische Verbindungen eingenäht werden können. Sie dienen auch der Orientierung des Roboters, indem sie Annäherungen und Berührungen registrieren und den Roboter so in der Analyse seiner Umgebung unterstützen. Außerdem sind in die Roboterhaut LEDs integriert, die als Positionslichter oder Blinker fungieren können.
Die Verbindung der in die Haut eingelassenen Sensorelemente mit dem Rumpf des Roboters erfolgt über wasserfeste Kabel, welche die Kommunikation der elektrischen Bauteile sowie ihre Energieversorgung sichern. Dabei sind die einzelnen Sensorelemente modular in die Roboterhaut integriert und können schnell und einfach über kleine Schnapphaken ausgewechselt werden. So läßt sich der Roboter problemlos an verschiedene Anwendungsfälle anpassen.
Dank beweglicher Wirbel ist der sensible Mantarochen trotz seiner großen Spannweite auch sehr wendig, was einen Schwachpunkt bisher existierender, vergleichbarer Roboter war, die sich durch die diversen erforderlichen Meßinstrumente sowie ihre Befestigung oftmals als zu unbeweglich erwiesen. Derzeit kann der Robo-Manta bis zu zirka 50 m tief tauchen und dort ein Bodenprofil aufzeichnen.
Im Juni 2019 berichtet
die Presse, daß Forscher der Cornell
University und der University of Pennsylvania um
die Professoren Robert F. Shepherd und James
H. Pikul in dem Bemühen, autonome und lebensähnliche Roboter
zu schaffen, einen weichen Roboter-Löwenfisch mit
einem multifunktionalen Kreislaufsystem entwickelt haben. Vorbild
für das Gerät, das in der einsehbaren Studie ,Electrolytic vascular
systems for energy-dense robots’ beschrieben wird, ist der Rotfeuerfisch,
der tropische Korallenriffe bewohnt.

mit Kreislaufsystem
Während Roboter in der Regel einzelne Bauteile für einzelne Aufgaben besitzen, verfügt ein tierischer Organismus über Systeme mit mehreren Funktionen. Die Kiemen von Fischen zum Beispiel ermöglichen den Gasaustausch unter Wasser, halten den Druck der Körperflüssigkeit aufrecht, regulieren das Säure-Basen-Gleichgewicht und leiten Abfallstoffe aus.
Davon ausgehend statten die Forscher den Nachbau mit kleinen Schläuchen aus, in denen statt Blut eine Elektrolytlösung zirkuliert. Diese Flüssigkeit treibt den Fisch über ein hydraulisches System mechanisch an und dient gleichzeitig als Energiespeicher. Hierzu gibt es zwei Hydraulikpumpen, die jeweils durch miteinander verbundene Redox-Flow-Batterien mit Zink-Jodid-Elektrolyt aktiviert werden. Während des Ladens scheidet sich Zink aus der Elektrolytflüssigkeit auf einer Elektrode ab, beim Energieverbrauch kehrt sich die Reaktion um.
Gleichzeitig kann das Kreislaufsystem hydraulisch Kraft übertragen: Eine Pumpe bewegt die Schwanzflosse, indem sie die Elektrolyt-Flüssigkeit von einer Seite des 3D-gedruckten Schwanzes zur anderen bewegt, so daß der Roboterfisch schwimmen kann, während die andere die in den langen, aufgefächerten Rückenflossen gespeicherte Flüssigkeit in die Brustflossen pumpt, die sich ebenfalls bewegen - und bei den lebendigen Vorbildern zur Kommunikation genutzt werden.
Dem Team zufolge sei so etwas noch nie zuvor gemacht worden. Es ist das erste Experiment, bei dem hydraulische Kraftübertragung, Antrieb und Energiespeicherung in einem einzigen, multifunktionalen System in einem Roboter kombiniert werden.

Ganz so gut wie eine moderne Lithium-Ionen-Batterie funktioniert die Kreislaufbatterie des Robo-Fischs allerdings noch nicht, da ihre Energiedichte nur halb so groß ist. Dafür arbeitet sie zuverlässig und kann leicht an Größe und Form des Gesamtsystems angepaßt werden. Die Leistung der Kreislaufbatterie reicht in Tests aus, um den Roboterfisch autonom 36 Stunden gegen eine leichte Strömung schwimmen zu lassen, wobei er etwa anderthalb Körperlängen pro Minute vorankommt, bevor er wieder aufgeladen werden muß.
Die Wissenschaftler um Shepherd veröffentlichen im November 2024 eine im Netz einsehbare Studie mit dem Titel ,The multifunctional use of an aqueous battery for a high capacity jellyfish robot’, in welcher auf die Vorteile von Batterien, die hauptsächlich aus flüssigen Medien bestehen, wie z.B. Redox-Flow-Batterien (RFB), eingegangen wird.
Im Experiment wird eine RFB in Form einer Qualle geformt und dabei zwei Redoxchemien und -architekturen verwendet: eine sekundäre ZnBr2-Batterie und eine hybride primäre/sekundäre ZnI2-Batterie, was zu einer langen Betriebslebensdauer für Unterwasserfahrzeuge führt, die hauptsächlich aus elektrochemisch energiedichter Flüssigkeit (~ 90 % des Robotergewichts) bestehen.
Im August 2019 stellt ein Team der School of Marine Science and Technology an der Northwestern Polytechnical University (NPU) der VR China eine biomimetische Unterwasserdrohne in Form eines Mantarochens vor.

Es sind bereits mehrere Prototypen gebaut worden, deren kleinster eine Flügelspannweite von 0,8 m hat und eine Höchstgeschwindigkeit von 1 Knoten pro Stunde erreicht, angetrieben von einer Lithiumbatterie. Die größeren Prototypen haben eine Spannweite von 2 m bzw. 3 m. Der Status des Projekts ist aber unklar.
Ein weiteres chinesisches Projekt zur Entwicklung eines militärischen AUV mit hoher Geschwindigkeit und hoher Nutzlast wird einem Hai nachempfunden. Es soll geringe Strömungsgeräusche und eine sonarabsorbierende Beschichtung haben und daher für ISR-Operationen (Intelligence, Surveillance and Reconnaissance) eingesetzt werden. Daneben gibt es auch ein kleineres Design namens Robo-Fish. Bislang ließen sich aber keine näheren technischen Details über diese Entwicklungen finden.
Nach dem eher auf die Forschung ausgerichteten Programm SABUVIS I der Europäischen Verteidigungsagentur (EDA), das 2009 begann und 2019 abgeschlossen wird, wobei Portugal aus dem Programm aussteigt, folgt im September die Ankündigung des Programms SABUVIS II, als vierjähriges Unternehmen zur Entwicklung eines Schwarms biomimetischer Unterwasserfahrzeuge für die Aufklärung und -überwachung (ISR), an dem Polen und Deutschland beteiligt sind.

(2016)
Im Zuge des ersten Programms drei verschiedene biomimetische Unterwasserfahrzeuge (BUVs) konstruiert worden, darunter das hier abgebildete Modell, das 2016 in Polen konstruiert wurde. Zu den ermittelten Vorteile gehört, daß der flossenförmige Antrieb weniger elektrische Energie verbraucht als herkömmliche Antriebssysteme mit Schraubenpropellern und daß er hydroakustische Signaturen mit einem entsprechend niedrigeren Geräuschpegel erzeugt.
Durch die Nachahmung von Schlüsselmerkmalen des marinen Lebens, vor allem des Antriebs und des Verhaltens, hofft man, daß solche Unterwasserfahrzeuge schwerer zu entdecken oder vom Hintergrund zu unterscheiden sind, was ihre Überlebensfähigkeit erhöht. Laut der EDA ist das Projekt für die Verteidigung wichtig, da unbemannte Unterwasserfahrzeuge zunehmend für eine Vielzahl unterschiedlicher Aufgaben in der maritimen Umgebung eingesetzt werden.
In der zweiten Phase, die offiziell im Juni 2023 beginnt, sollen die Schwarmaspekte mit enger kooperierenden Fahrzeugen, die sich in Formationen bewegen und aus Fahrzeugen mit spezifischen Funktionen oder Aufgaben bestehen, weiter untersucht werden. Das Projekt wird sich dabei insbesondere auf die Führungsfahrzeuge konzentrieren, die für die Navigationsfunktion verantwortlich sind.
Die wichtigsten Organisationen, die das Projekt durchführen sollen, sind die polnische Marineakademie sowie die Wehrtechnische Dienststelle für Schiffe und Marinewaffen der Bundeswehr, Maritime Technologie und Forschung (WTD 71) in Deutschland.
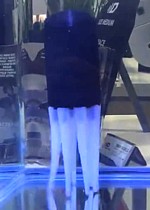
Das 2014 gegründete australische Verteidigungsunternehmen Defendtex präsentiert auf der Messe Defence & Security Equipment International (DSEI) im September 2019 in London eine autonome, krakenähnliche Drohne, die für den Einsatz zur Seejagd in Schwärmen konzipiert ist.
Der Sea Hunting Autonomous Reconnaissance Drone (SHARD) genannte weiche Kopffüßler-Roboter ist tatsächlich eine schwimmfähige Unterwasserbombe, die in der Lage ist, sich an feindliche Kriegsschiffe anzuhängen, um dann entweder allein oder als Schwarm zu explodieren. Später läßt sich aber nichts mehr darüber finden, auch nicht auf der Firmenhomepage.
Um Unterwasserumgebungen zu erforschen, ohne Korallen oder Meereslebewesen zu schädigen, haben Prof. Michael T. Tolley sowie die Ingenieure Xiaobo Bi und Qiang Zhu von der University of California San Diego (UCSD) einen Squidbot entwickelt, den sie in ihrem im Oktober 2019 erscheinenden Bericht ,Fluid-structure investigation of a squid-inspired swimmer’ beschreiben.
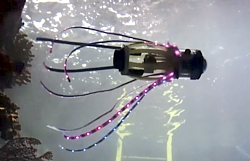
der UCSD
Um ihren Roboter-Tintenfisch zu bauen, verwenden sie hauptsächlich weiche Materialien wie Acrylpolymer, zusammen mit einigen 3D-gedruckten und lasergeschnittenen starren Teilen.
Das Besondere an dem Gerät ist ein Unterwasser-Antriebssystem, das von der düsengetriebenen Fortbewegung von Tintenfischen und anderen Kopffüßern inspiriert ist. Der Roboter nimmt etwas Wasser in seinen flexiblen Körper auf, wo er auch elastische Energie speichert. Um diese Energie freizusetzen und sich mit einem Wasserstrahl anzutreiben, kann er seinen Körper zusammendrücken, wobei das Gerät die Position der Düse einstellen und dadurch in jede gewünschte Richtung schwimmen kann.
Zur Veranschaulichung der physikalischen Mechanismen, die an der Antriebsleistung dieser Konstruktion beteiligt sind, wird ein zweidimensionales, nicht axialsymmetrisches Fluid-Struktur-Interaktionsmodell entwickelt. Dieses umfaßt einen verformbaren Körper mit einer Druckkammer, die periodische Aufblas- und Entleerungsbewegungen durchführt, welche durch angebrachte Federn und eine Düse ermöglicht werden, durch die die Kammer gefüllt und wieder geleert wird, um einen Strahl zu bilden.
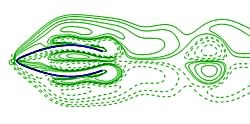
(Grafik)
Bei einer numerischen Untersuchung der Dynamik dieses Systems, aus der auch die Abbildung stammt, zeigt es sich, daß die Schuberzeugung mit der Frequenz der Körperverformung zunimmt, während der Wirkungsgrad bei einer bestimmten Frequenz einen Spitzenwert erreicht.
Wie auf der Abbildung zu sehen ist, besteht das umgebende Strömungsfeld aus einer Kombination von Wirbeln, die vom Körper und der Düse abgestoßen werden, und der optimale Wirkungsgrad wird erreicht, wenn die von der Düse erzeugten Wirbel den Nachstrom zu dominieren beginnen.
Den Ingenieuren zufolge erreicht der Roboter eine Geschwindigkeit von etwa 800 m pro Stunde. Er kann seine Energiequelle in seinem Körper tragen, so daß kein Halteseil oder Verbindungsdraht erforderlich ist, und verfügt außerdem über ein wasserdichtes Fach, in dem eine Kamera oder ein anderer Sensor für Datenaufzeichnung untergebracht werden kann.

Squidbot
Im Oktober 2020 erscheinen Berichte mit weiteren Details: Demnach wurde der Roboter zwischenzeitlich in einem Wasserbett und dann in einem größeren Aquarium mit anderen Lebewesen erprobt. Dabei erreicht der Squidbot Geschwindigkeiten von bis zu 32 cm/s oder 0,8 km/h und zeigt auch, wie er durch Änderung der Ausrichtung der Düse gesteuert werden kann, während er erfolgreich zwischen Korallen und Fischen schwimmt.
Im Mai 2022 folgt die einsehbare Arbeit ,Physics and applications of squid-inspired jetting’, und im Oktober veröffentlichen das Team und weitere Wissenschaftler, zu denen auch Kollegen der University of Strathclyde in Glasgow und der chinesischen Northwestern Polytechnical University gehören, den im Netz einsehbare Bericht ,Thrust and torque production of a squid-inspired swimmer with a bent nozzle for thrust vectoring’, in welchem sie über die numerische Untersuchung eines dreidimensionalen Pulsstrahlantriebsmodells berichten, das aus einem flexiblen Körper und einer lenkbaren, gebogenen Düse besteht.
In
einer Studie namens ,Leveraging Monostable and Bistable Pre-Curved
Bilayer Actuators for High-Performance Multitask Soft Robots’, die
im Juni 2020 erscheint, berichten Wissenschaftler
der North Carolina State University (NCSU) um Prof. Jie
Yin gemeinsam mit Kollegen der Temple University über
die Entwicklung von weichen Robotern, die von Quallen inspiriert sind
und Luftkanäle nutzen, um mit großer Geschwindigkeit zu schwimmen.
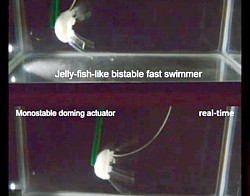
Diese neue Art von Softrobotern baut auf früheren Arbeit des Teams auf, die einen sich schnell bewegenden Roboter nach dem Vorbild eines Geparden hervorbrachte. Diese Maschine pumpte abwechselnd Luft in und aus zwei Aktuatoren, um eine steife Wirbelsäule zu veranlassen, sofort von einem gebeugten Zustand in einen anderen zu springen. Das Konzept des Wechsels zwischen zwei stabilen Zuständen soll Roboter leistungsfähiger und schneller machen. Der neue Quallen-Roboter ist eine Anpassung dieses Ansatzes.
Quallen schwimmen mit einer sehr hohen Energieeffizienz, was das Team durch die Verwendung einer Elastomerscheibe nachbildet, die vorgespannt wird, indem sie in vier verschiedene Richtungen gedehnt und dann mit zwei anderen, nicht gespannten Schichten kombiniert wird, von denen eine einen Luftkanal aufweist.
Ein Stapel von Elastomerscheiben ergibt einen weichen Roboter, der zwischen einem entspannten Zustand, in dem er sich wie eine Schale wölbt, und einem gebogenen Zustand, in dem sich diese Schalenform schnell in eine Kuppel umwandelt, wechseln kann - und zwar indem der leere Kanal mit Luft gefüllt wird. Dadurch stößt die Maschine Wasser weg und bewegt sich vorwärts. Der Roboter läßt sich biegen, indem Luft in die Kanalschicht gepumpt wird, und die Richtung dieser Biegung wird gesteuert, indem die relative Dicke der vorgespannten Schicht kontrolliert wird.
In Tests erreicht der weiche Roboter eine durchschnittliche Geschwindigkeit von 53,3 mm/s, während keine der drei Quallenarten, die im Rahmen der Forschung untersucht wurden, schneller als 30 mm/s war.
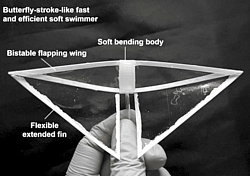
Im November 2022 veröffentlicht das NCSU-Team eine im Netz einsehbare Arbeit unter dem Titel ,Snapping for high-speed and high-efficient butterfly stroke–like soft swimmer’. Darin wird über die Kreation eines weichen Roboters nach dem Vorbild des Mantarochens berichtet, der den Schmetterlingsschlag eines schwimmenden Menschen nachahmt, um sich mit hoher Geschwindigkeit durch das Wasser zu bewegen.
Andere weiche Roboter, die dem Mantarochen nachempfunden sind, nutzen Schlagmechanismen, um ihren effizienten Antrieb zu imitieren, oder setzen auf passive Systeme mit flexiblen Flossen, um sich natürlicher im Wasser zu bewegen. Zudem konzentrieren sich die meisten bisherigen Versuche auf die Verwendung von Motoren, die die Flügel direkt mit Energie versorgen. Damit waren die schwimmenden Roboter häufig nicht in der Lage, schneller als eine Körperlänge pro Sekunde voran zu kommen.
Als Alternative baut das Team zwei Versionen eines Roboters, die beide auf einem weichen Silikonkörper basieren. Sie verfügen jeweils über zwei dreieckige, flügelartige Flossen, die aus einer biegsamen dünnen Folie bestehen. An den Kanten sind sie mit einem stabileren, etwas dickeren Polyester-Material verstärkt. Beide Flossen haben je nach Modell eine Spannweite von ca. 16 - 19 cm und sind an einem länglichen Körper befestigt, der aus einem weichen Silikon mit einem Hohlraum besteht. Diese Kammer dient dem Antrieb des Roboters.
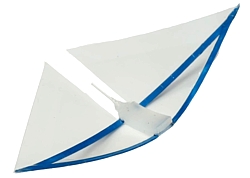
(neue Version)
Die Mitte der bistabilen Flügelstruktur wird zwischen den oberen und unteren pneumatischen Aktuatoren eingeklemmt. Wenn Luft über eine externe Luftpumpe in den oberen Aktuator gepumpt wird, wölbt er sich nach oben und zieht die Mitte der Flügelstruktur nach oben, wodurch sie in eine Position ,einrastet’, in der die beiden Flügel nach unten gezogen werden. Wird die Luft dann aus dem oberen Stellglied abgelassen und das untere aufgepumpt, schnappt die Struktur in die entgegengesetzte Richtung und bringt die Flügel wieder nach oben.
Indem die beiden Aktuatoren auf diese Weise hin und her bewegt werden, wechseln die Flügel zwischen zwei stabilen Zuständen und schnappen hin und her, um einen Antrieb zu erzeugen, ähnlich wie die Arme eines Menschen beim Schmetterlingsschwimmen. Dies ermöglicht eine vereinfachte Konstruktion, die auch das Gewicht senkt.
Die schnellere Version des Schmetterlingsbot verwendet den weichen Körper als einzige Antriebseinheit und steuert beide Flügel gleichzeitig, um eine durchschnittliche Schwimmgeschwindigkeit von 3,74 Körperlängen pro Sekunde zu erreichen, was den winzigen Roboter-Mantarochen zum aktuell schnellsten schwimmenden Weichkörperroboter der Welt macht. Der zweite, auf Manövrierfähigkeit ausgelegte Roboter verwendet zwei Antriebseinheiten für die Steuerung der beiden Flügel, wodurch er enge Kurven fahren kann. Diese wendigere Version ist jedoch immer noch in der Lage, sich mit 1,7 Körperlängen pro Sekunde fortzubewegen.
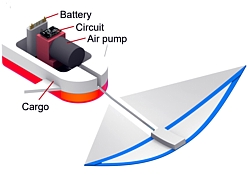
mit Beiboot
(Grafik)
Die als Konzeptnachweis betrachtete Arbeit hat allerdings ihre Grenzen. So sind die aktuellen Prototypen noch durch dünne Schläuche gefesselt, die verwendet werden, um Luft in die zentralen Körper zu pumpen. Das Team arbeitet aber bereits an der Entwicklung einer ungefesselten, autonomen Version.
Im Dezember 2024 folgt der einsehbare Bericht ,Spontaneous snapping-induced jet flows for fast, maneuverable surface and underwater soft flapping swimmer’ über einen neuen, 68 mm langen Robo-Manta, bei dem auf das bistabile Design und den Bodenantrieb verzichtet wird. Statt dessen ist die flexible Flügelstruktur nun monostabil, d.h. sie kehrt immer in nur eine Position zurück - in der Mitte nach unten gebogen und mit den Flügeln nach oben -, wenn keine Energie zugeführt wird.
Beim Aufblasen rollt sich der einzelne obere pneumatische Aktuator nach unten und zieht an der Mitte der Flügelstruktur, wodurch die Flügel nach unten schnappen. Sobald der Aktuator jedoch die Luft abläßt, schnappt er aufgrund der elastischen Rückstellkraft der Struktur wieder in seine Ausgangsposition zurück und zieht dabei die Flügel nach oben. Dadurch muß der neue Roboter nur noch einen Aktuator aktivieren, während sein Vorläufer pro Auf- und Abschwimmzyklus noch zwei Aktuatoren abwechselnd auf- und abblasen mußte.

in Fahrt
Durch diese Verbesserung erreicht der Roboter eine Geschwindigkeit beim Schwimmen von bis zu 6,8 Körperlängen pro Sekunde, wobei er gleichzeitig1,6 Mal weniger Energie als das Original verbraucht. Das neue Design ermöglicht auch, daß er sich vertikal in der Wassersäule bewegen kann, indem er einfach seine Schwimmgeschwindigkeit ändert, denn je schneller er mit den Flossen schlägt, desto öfter ist die Luftkammer voll und desto mehr Auftrieb hat er. Wird die Schlagfrequenz verlangsamt, kann der Roboter zwischen den Flossenschlägen leicht sinken.
Um das System in freiem Wasser auf die Probe zu stellen, wird der bis dahin kabelgebundene Antrieb durch eine Art Bootsanhänger mit Batterie und Luftpumpe ersetzt, den der Roboter hinter sich her zieht. Der etwa 2,2 g leichte Roboter kann dabei erfolgreich das Gewicht seiner eigenen Energiequelle bewältigen, was seine Maximalgeschwindigkeit allerdings auf 1,35 Körperlängen pro Sekunde senkt.
Mit Blick auf künftige Anwendungen arbeiten die Wissenschaftler nun an einer Methode zur seitlichen Steuerung des Roboters. Außerdem will das Team den Pumpenantrieb in den Roboter integrieren, um ihn nicht mehr auf dem ,Beiboot’ unterbringen zu müssen.
In einer im September 2020 veröffentlichten
und im Netz einsehbaren Studie namens ,A Miniature Robotic Turtle With
Target Tracking and Wireless Charging Systems Based on IPMCs’ berichten
Forscher der Wuhan University über ihre Lösung des
Problems, daß autonome mikro-robotische Schildkröten unter
Energiebeschränkungen leiden, die ihre Einsatzzeiten minimieren.
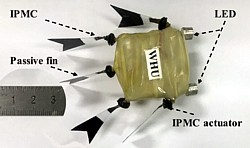
Schildkröte
Um solche Einschränkungen zu überwinden, entwirft das Team einen biomimetischen Unterwasserroboter auf der Basis von ionischen Polymer-Metall-Verbundwerkstoffen (IPMC) und entwickelt eine Roboterschildkröte mit selbstaufladenden Fähigkeiten. Angetrieben von fünf IPMCs kann sie sich auf dem Wasser vorwärts bewegen und Kurven fahren.
Zur Kommunikation zwischen einer Unterwasser-Ladestation und dem biomimetischen Unterwasserroboter für die autonome Verfolgung und Aufladung wird ein Ultraschall-Kommunikationssystem mit einem Sender und zwei Empfängern hergestellt. Dadurch ist die Unterwasserstation in der Lage, Breitband-Ultraschall und elektromagnetische Felder für die elektromagnetische Induktionsladung zu übertragen. Im Experiment werden die autonome Zielverfolgung, die Wiederaufladbarkeit und eine Ladezuverlässigkeit von mehr als 73 % nachgewiesen.
Über den Einsatz von Roboterfischen zur Untersuchung und Steuerung des Schwarmverhaltens berichten der Doktorand Florian Berlinger und seine Kollegen der Harvard University im Januar 2021. Unter dem Titel ,Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm’ beschreiben sie in ihrer einsehbaren Studie Bluebots genannte, winzige Unterwasserroboter, die wie Fische zusammenarbeiten.
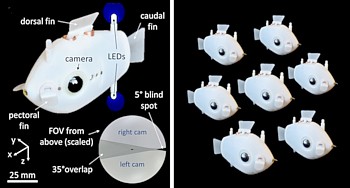
Die Bluebots schwimmen, indem sie mit dem Schwanz flattern und ihre Flossen bewegen, und sie sind jeweils mit zwei Weitwinkelkameras und drei gut sichtbaren blauen LEDs ausgestattet. Durch die Kombination der Ergebnisse seiner beiden Kameras für eine 3D-Computersicht ist jeder Bluebot in der Lage, die Entfernung, Richtung und den Kurs aller anderen Bluebots in einem Wassertank im Verhältnis zu sich selbst zu bestimmen.
Mit Hilfe benutzerdefinierter Algorithmen zur Analyse dieser Daten kann der kollektive ,Blueswarm’ Aktionen wie das Zusammenziehen, Verteilen und Schwimmen im Kreis durchführen. Grundlegend sind die Roboter so programmiert, daß sie den Lichtern direkt vor ihnen im Uhrzeigersinn folgen und als Schwarm im Kreis schwimmen. Sollen sich sich zusammenschließen, berechnet jeder Bluebot die Position seiner Nachbarn und bewegt sich in Richtung des Zentrums, sollen sie sich zerstreuen, tun die Bluebots das Gegenteil.
Zur Demonstration einer möglichen Such- und Rettungsanwendung werden die Bluebots so programmiert, daß sie sich in ihrem Tank verteilen, bis einer von ihnen nahe genug an ein rotes Licht herankommt, um dessen Anwesenheit zu erkennen. Dieser Roboter fing dann an, seine LEDs blinken zu lassen, was den Rest des Schwarm dazu veranlaßte, sich um ihn herum zu versammeln. Obwohl die Bluebots selbst wahrscheinlich nicht in der Lage wären, jemanden zu retten, könnte die Kerntechnologie aber auch auf viel größere, leistungsfähigere autonome Unterwasserroboter angewendet werden.
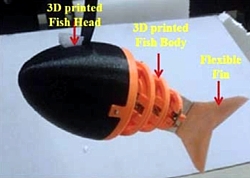
des IIT
Ebenfalls im Januar 2021 veröffentlichen M. Muralidharan und I. A. Palani vom Indian Institute of Technology (IIT) in Indore die im Netz einsehbare Arbeit ,Development of Subcarangiform Bionic Robotic Fish Propelled by Shape Memory Alloy Actuators’. Darin wird ein durch eine Formgedächtnislegierung (shape memory alloy, SMA) angetriebener Roboterfisch vorgestellt, der aus leichten 3D-gedruckten Komponenten besteht und einen federbasierten Antriebsmechanismus verwendet. Das Design ohne herkömmlichen Motor oder andere Drehantriebe ist skalierbar, leicht und kostengünstig.
Die Schwanzflosse und der hintere Teil des Körpers des Fischprototyps nehmen an der Wellenbewegung teil, die dem Fortbewegungsmuster von Subcarangiformes ähnelt, einer Schwimmart von Fischen, bei der der größte Teil des Antriebs durch den Schwanz, ein Teil jedoch durch Bewegungen des Körpers erzeugt wird. Damit wird ein gleichmäßiges Schwimmen mit einer Vorwärtsgeschwindigkeit von 24,5 mm/s erreicht.
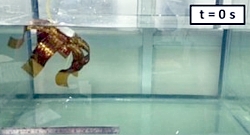
des IIT
Ebenfalls aus dem IIT stammt der Bericht über einen weiteren Quallen-Roboter, der im Juli 2023 erscheint. Sein Korpus besteht großteils aus Polyamid, einem sowohl robusten als auch flexibel dehnbaren, wasserabweisenden Kunststoff. Der Roboter hat sechs bandförmige Tentakel, mit denen er sich rudernd fortbewegt, die durch Formgedächtnisdrähte aus Nitinol angetrieben werden. Wird der Draht erwärmt, zieht er sich zusammen und beugt das angehängte Tentakel, in das er integriert ist. Kühlt er wieder ab, streckt sich der Fangarm.
Der Roboter ist weich, flexibel und mit einem Gewicht von 45 g sehr leicht. Sein Antrieb ist günstig, einfach und schnell herzustellen, die Stromversorgung und Elektronik sind auf dem Korpus befestigt. Die Forscher experimentieren mit unterschiedlichen Nitinoldrahtdicken, um eine optimale Fortbewegung zu erreichen. In ersten Tests schwimmt der mit einer Kamera und einem Sonarsender für die Objekterkennung ausgestattete Prototyp horizontal mit einer Geschwindigkeit von 10 mm/s und vertikal mit 0,2 mm/s.
Auch die Wissenschaftler Thierry
Bujard, Francesco
Giorgio-Serchi und Gabriel D. Weymouth von
der University of Southampton und der University
of Edinburgh berichten im Januar 2021 über
Arbeiten an einem von Tintenfischen inspirierten
Roboter. Demnach wird Elastizität mit der bemerkenswerten Antriebseffizienz
von Tieren mit Pulsstrahlantrieb wie Tintenfischen und Quallen in
Verbindung gebracht, aber Berichte, die die zugrunde liegende Dynamik
quantifizieren oder ihre Anwendung in Robotersystemen demonstrieren,
sind selten.
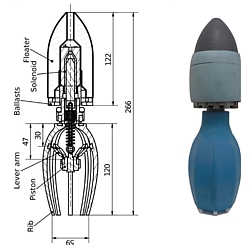
(Aufbau und Modell)
Die Forscher identifizieren den von diesen Tieren verwendeten Pulsstrahlantrieb als gekoppelten Masse-Feder-Masse-Oszillator, was die Konstruktion eines flexiblen selbstfahrenden Roboters ermöglicht. Der einfache, aber effektive Mechanismus des Prototyp-Roboters besteht aus einer Gummimembran, die acht 3D-gedruckte, achsensymmetrisch angeordnete flexible Rippen umschließt, die zusammen eine ,Antriebsglocke’ bilden.
Der kleine Kolben eines Linearantriebs in der oberen Hälfte des Roboters stößt diese Glocke wiederholt an, so daß sie sich radial ausdehnt und dann zurückfedert. Dies ahmt die Schwimmtechnik einer Qualle nach und erzeugt die Flüssigkeitsstrahlen, die den Roboter durch das Wasser treiben. Wenn der Kolben mit der richtigen Frequenz arbeitet - der Eigenresonanz der Komponenten - verbraucht der Roboter sehr wenig Energie, kann aber große Wasserstrahlen erzeugen, um sich mit einer Körperlänge pro Sekunde vorwärts zu bewegen.
Der flexible Prototyp wird eingesetzt, um experimentell nachzuweisen, daß Resonanz die Pulsstrahl-Schwimmgeschwindigkeit und -effizienz erheblich verbessert. Dabei wird festgestellt, daß die optimalen Transportkosten des Roboters denen der effizientesten biologischen Schwimmer in der Natur, wie beispielsweise der Qualle Aurelia aurita, entsprechen.
Diese ,Transportkosten’ beschreiben das Verhältnis von Leistung zu Geschwindigkeit und Gewicht und werden verwendet, um die Effizienz von Arten in der gesamten Biologie zu vergleichen. Nach diesem Maßstab ist die Qualle das effizienteste Tier in der Natur und schlägt mit Leichtigkeit laufende und fliegende Tiere sowie Knochenfische.
Der neue Roboter ist dem Team zufolge das erste Unterwasserfahrzeug, das die Vorteile der Nutzung von Resonanz für den Unterwasserantrieb demonstriert. Erweiterungen des aktuellen Rahmens auf Schwingungen mit größerer Amplitude könnten Resonanzeffekte mit optimaler Wirbelbildung kombinieren, um die Antriebsleistung weiter zu steigern und möglicherweise sogar biologische Schwimmer zu übertreffen.
Als nächstes soll das Konzept zu einem vollständig manövrierfähigen und autonomen Unterwasserfahrzeug ausgebaut werden, das in der Lage ist, seine Umgebung zu erfassen und zu navigieren. Die Studie ,A resonant squid-inspired robot unlocks biological propulsive efficiency’ ist im Netz einsehbar.
Wissenschaftler der Carnegie Mellon University (CMU)
um Prof. Howie Choset, die schon seit Jahren modulare,
schlangenähnliche Roboter für verschiedene Zwecke entwickeln, präsentieren
im April 2021 ihre neueste Adaption, die die Technologie
unter Wasser führt.

Ähnlich wie die o.e. Eelume-Roboter soll der tauchfähige SnakeBot, der in der Lage ist, in engsten Räumen zu navigieren, zur Schadensbeurteilung von Marineschiffen und U-Booten auf hoher See oder zur Untersuchung von Unterwasserrohren oder -tanks sowie Bohrinseln und anderer Infrastruktur eingesetzt werden.
Die neueste Version des SnakeBot, an der das Team im Juli 2020 mit der Arbeit begann, trägt den Namen Hardened Underwater Modular Robot Snake (HUMRS) und ist wie seine Vorgänger modular und rekonfigurierbar aufgebaut. Im vorliegenden Fall sind Module mit Turbinen und Thruster-Antrieb, Auftriebskontrollsysteme, Drehgelenke, Inspektionssensoren und Manipulationsgreifer zu einer Unterwasserversion zusammengesetzt.
Im Schwimmbecken der Universität demonstriert die schmale und gelenkige Roboterschlange ihre Manövrierfähigkeit, indem sie sich durch Unterwasserreifen schlängelt. Details zur Batterie oder Einsatzdauer sind öffentlich nicht bekannt, aber die Module verfügen jeweils über eigene, wasserdichte Elektronik.
Im Juni berichten Forscher der City University of Hong Kong (CityU) unter der Leitung der Professoren Shen Yajing und Shi Jiahai in ihrer einsehbaren Studie ,Self-adaptive and efficient propulsion of Ray sperms at different viscosities enabled by heterogeneous dual helixes’ über neue Einsichten in Bezug auf die Bewegung von Spermien, deren Antrieb bislang auf das hin und her Schlagen oder das Drehen der weichen Schwänze zurückgeführt wurde.
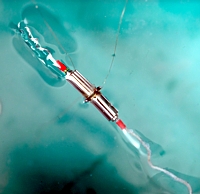
Nun stellt sich heraus, daß Rochen, die schon so ungewöhnlich genug sind, auch einzigartige Spermien besitzen, deren Bewegung durch den spiralförmigen, weichen Schwanz und durch die Drehung ihres starren Kopfes erfolgt, der etwa 31 % der Antriebskraft beiträgt. Außerdem ist dieser Kopf lang und spiralförmig wie ein Korkenzieher, so daß er sich leicht seinen Weg durch flüssige Umgebungen bahnen kann. Dadurch können sich diese Spermien nicht nur schneller und effizienter als andere fortbewegen, sondern sich auch an die Bewegung in Flüssigkeiten unterschiedlicher Viskosität anpassen, indem sie die Antriebsleistung von Kopf und Schwanz unabhängig voneinander einstellen.
Die Energie für die Rotationsbewegung liefert ein flexibler Mittelteil zwischen Kopf und Schwanz, der auch eine bessere Manövrierfähigkeit ermöglicht, da sich das Spermium wie eine Ziehharmonika biegen kann, wobei sich sowohl der Kopf als auch der Schwanz drehen, um es um Kurven zu ziehen. Stößt es auf ein Hindernis, kann es außerdem einfach durch Drehen des Kopfes in die entgegengesetzte Richtung umkehren. Spermien anderer Tiere sind dagegen nicht in der Lage, sich rückwärts zu bewegen.
Die Wissenschaftler nennen dieses Bewegungssystem Heterogenen Doppelhelix-Antrieb (Heterogeneous Dual Helixes, HDH) und bauen ihn in einen von Rochen-Spermien inspirierten Roboter ein, der klein genug ist, um auf eine Handfläche zu passen. Er besteht aus einem starren Spiralkopf aus Eisendraht, einem weichen Schwanz aus Baumwolldraht und dazwischen zwei Elektromotoren. Er ist anpassungsfähiger und energieeffizienter als andere Schwimmroboter, wenn es darum geht, sich durch unterschiedlich viskose Flüssigkeiten zu bewegen.
Das Team hofft, daß eines Tages viel kleinere Versionen des HDH-Roboters in der Lage sein werden, durch Blutgefäße im Körper von Patienten zu schwimmen, um Medikamente an bestimmte Stellen zu bringen. Von eine Hochskalierung ist bislang aber nichts zu hören.
Hinweis: Wie im Kapitel Micro Energy Harvesting unter Magnetfeld ausführlich beschrieben, war der Physiker Oliver G. Schmidt bereits im März 2018 mit dem Leibniz-Preis für seine Entwicklung eines Spermbots ausgezeichnet, mit dessen Hilfe die künstliche Befruchtung in vitro, also im Glas, ersetzt werden soll (s.d.).
Im Mai 2021 erscheinen die ersten internationalen Berichte über ein neues autonomes Unterwasserfahrzeug, das wie ein Pinguin aussieht und genauso schwimmt. Der 3D-gedruckte, rund 25 kg schwere und vom Adeliepinguin inspirierte Quadroin wird von Prof. Burkard Baschek am Helmholtz-Zentrum Hereon in Geesthacht entwickelt, um die Eigenschaften von Meereswirbeln zu messen.

Diese Wirbel sind kleine Meeresströmungen, die mit anderen Forschungsmethoden nur schwer zu erfassen sind. Sie beeinflussen alle Tiere und Pflanzen in den Meeren sowie das Klima der Erde und sind für etwa 50 % der gesamten Phytoplanktonproduktion verantwortlich. Dies ist elementar, denn als Basis der marinen Nahrungskette produzieren Phytoplankton und andere Meerespflanzen wie Seetang und Algenplankton bis zu 70 % des atmosphärischen Sauerstoffs.
Baschek hatte zunächst eine Anordnung von etwa 20 Sensoren konstruiert, die an einem Seil befestigt hinter einem Schiff hergezogen werden, um in verschiedenen Tiefen wichtige ozeanografische Variablen in den Wirbeln zu messen - wie Temperatur, Druck, Sauerstoffgehalt, Salzgehalt, Chlorophyll, Sauerstoff, Leitfähigkeit und Fluoreszenz des Wassers. Doch als sich das Seil an Felsen, Fischernetzen oder einem versenkten Container verfängt, sinkt die Ausrüstung im Wert von mehr als 20.000 $ auf den Grund des Pazifiks.
Die Lösung in Form eines Geräts, das diese Messungen durchführen kann, ohne an ein Seil gebunden zu sein, kommt von Rudolf Bannasch und seiner im Jahr 2000 gegründeten Berliner Firma EvoLogics GmbH, die auf Bionik nach dem Vorbild der natürlichen Evolution spezialisiert ist. Für die von Baschek - der übrigens auch Mitbegründer der EvoLogics ist - geplanten Hochgeschwindigkeitsmessungen erweisen sich Pinguine mit ihren optimalen Stromlinieneigenschaften als ideal.

Die Firma hat bereits Erfahrung mit derartigen Unterqwasserrobotern, da sie im Jahr 2009 für Festo einen Konzeptdemonstrator namens AquaPenguin entwickelt hat. Außerdem wird 2020 bei einer Outdoor-Demo das experimentelle AUV PingGuin vorgestellt, das für den Einsatz im Rahmen der MUM-Initiative (Modifiable Underwater Mothership) vorgesehen ist.
Der erste Quadroin-Prototyp - der Name leitet sich von quadro, nach den vier hinteren Schubdüsen, die das AUV bewegen, und penguin ab - absolviert seine Jungferntauchfahrt im April 2021 in einem See bei Berlin. Es erreicht eine Höchstgeschwindigkeit von 8 Knoten und verwendet die gleichen Sensoren, die früher an einem Seil gezogen wurden, kann sich jedoch bis zu einer Tiefe von 150 m frei im Wasser bewegen und dabei selbständig Hindernissen ausweichen.
Da Meereswirbel an mehreren Stellen gleichzeitig gemessen werden müssen, arbeiten Bannasch und seine Kollegen bereits daran, zwei weitere der rund 80.000 € teuren künstliche Pinguine zu schaffen, die KI-unterstützt als Schwarm agieren und miteinander kommunizieren. Hierzu werden ,singende’ Unterwassermodems entwickelt, so daß die Quadroins in der Lage sind, Zwitschersignale ähnlich denen von Delphinen zu senden und zu empfangen. Um sie nicht auf dem Meeresgrund zu verlieren, haben die künstlichen Pinguine einen letzten Trick, der auch ihre realen Vorbilder imitiert: Wenn die Elektronik ausfällt und die Sensoren nicht mehr funktionieren, schwimmen sie an die Oberfläche.
In der deutschen Presse erscheint der Roboter-Pinguin allerdings erst im April 2024, als die EvoLogics einen neuen und verbesserten Quadroin der zweiten Generation vorstellt. Dieser ist 112 cm lang und erreicht eine Höchstgeschwindigkeit von 18,5 km/h. Eine sechsstündige Aufladung seiner Lithium-Ionen-Batterie ermöglicht eine Betriebsdauer von bis zu zehn Stunden bei einer Geschwindigkeit von 7 km/h. Außerdem kann der Roboter bis zu 3 kg zusätzliche Ausrüstung transportieren. Zudem wird der Quadroin mit einem akustischen Navigationssystem für Taucher ausgestattet. Die Firma plant, diese neue Version im vierten Quartal diesen Jahres in Produktion zu nehmen.
Von der EvoLogics, die im Juli 2024 einen Preis der Berliner Deep Tech Awards gewinnt, stammen im übrigen auch das Poggy genannte, bionisch-autonome Unterwasserfahrzeug, das auf der Fin-Ray-Technologie basiert, sowie ein kleines, unbemanntes Überwasserfahrzeug namens Sonobot 5, über die sich mehr auf der Firmenhomepage findet.
Die Wissenschaftler Zhiyuan
,Annie’ Yang, Dongsheng
Chen, David J. Levine und Cynthia
Sung von der University of Pennsylvania veröffentlichen
im Juli 2021 den Bericht ,Origami-Inspired Robot
That Swims via Jet Propulsion’ über den interessanten Einsatz der
Origami-Technik zur Herstellung eines Unterwasserschwimmers, der
die körperlichen Rekonfiguration für den Eigenantrieb nutzt, ähnlich
wie bei Kopffüßern (Cephalopoden).
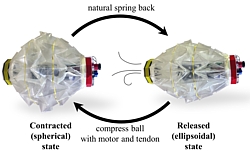
(Formwechsel)
Von Origami inspirierte Designs sind kostengünstig, schnell herzustellen, robust und können verwendet werden, um nachgiebige Mechanismen zu schaffen. In der aktuellen Arbeit wird ein entsprechender Roboter demonstriert, der seine Körperform verändern kann, um Wasser aufzunehmen und auszustoßen und dabei einen Strahl zu erzeugen, der ihn vorwärts treibt.
Das Teram verwendet hierbei das Origami-Muster des ,magischen Balls’, das sich zwischen einer ellipsoidischen Form mit geringem Volumen und einer kugelförmigen mit hohem Volumen verändern kann. Ein Auslösemechanismus zieht den Roboter zusammen, um Flüssigkeit aufzunehmen, und die inhärente Mechanik des magischen Balls bringt den Roboter beim Loslassen wieder in seine natürliche Form zurück. Im Wassertank erreicht der Roboter eine Geschwindigkeit von 6,7 cm/s, was 0,2 Körperlängen pro Sekunde entspricht.
Am Sung Robotics Lab der Universität beginnt im Frühjahr 2024 das Projekt ,SALP: Salp-inspired Approach to Low-Energy Propulsion’, in dessen Rahmen die Arbeiten an dem Wasserstrahlantrieb fortgeführt werden. Das Projekt orientiert sich an Salpen (Thaliacea), frei schwimmenden, wirbellosen Meerestieren mit einem tonnenförmigen Aussehen, die zum Unterstamm der Manteltiere gehören und mit Hilfe eines Düsenantriebs schwimmen, indem sie durch die vordere Öffnung Wasser in ihre muskulöse Mantelhöhle ziehen und es dann unter hohem Druck durch den hinteren Trichter ausstoßen.
In der Folgezeit wird eine SALP-Roboterplattform (Salp-inspired Approach to Low-energy Propulsion) mit mehreren Robotern für verteilte Langzeitmessungen entwickelt. Hierzu wird das Design des Strahlroboters optimiert, um eine höhere Schubkraft und einen geringeren Widerstand zu ermöglichen. Der SALP-Roboter ist insofern modular, als die Roboter manuell in verschiedenen physischen Anordnungen aneinander befestigt werden können, um die Auswirkungen der Interaktion mehrerer Roboter auf die Fortbewegungsleistung zu untersuchen. Dabei koordinieren physikalisch verbundene SALP-Ketten ihre Düsen, um verschiedene Antriebsarten zu erreichen.
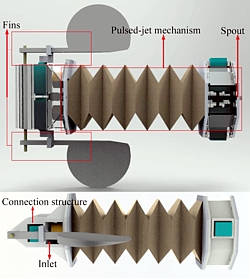
der Jiangxi University
Im September 2021 erscheint ein weiterer, diesmal sogar öffentlich einsehbarer Bericht über den Einsatz der Origami-Technik bei einem schwimmenden Roboter, der ebenfalls von Tintenfischen inspiriert ist. Die Arbeit unter dem Titel ,A squid-inspired swimming robot using folding of origami’ stammt von Junfeng Hu, Hu Li und Weilong Chen von der Jiangxi University of Science and Technology in Ganzhou.
Ihr im 3D-Druckverfahren hergestellte Schwimmroboter-Prototyp nutzt einen gepulsten Strahlmechanismus durch die Faltbewegung der röhrenförmigen Origami-Struktur, die sich verformen und wellen kann, um den Schwimmroboter anzutreiben. Dieser ist in einen stabilen Körper integriert, während sowohl das Vorwärtsschwimmen als auch die Steuerung durch die Faltbewegung der Origami-Struktur und die wellenförmigen Flossen erzeugt werden.
Im
Januar 2022 berichtet ein Team der Università
Politecnica delle Marche (UNIVPM) im italienischen Ancona
über einen neuen, schnellen und wendigen Roboterfisch, der sich wie
sein Vorbild mit Hilfe von Flossen fortbewegt und von Archäologen
und anderen Wissenschaftlern zur Erkundung von Unterwasserumgebungen
aus der Ferne eingesetzt werden soll. Der Artikel ,Design of a Labriform-Steering
Underwater Robot Using a Multiphysics Simulation Environment’ ist
im Netz offen einsehbar.

von Costa
Bei der Recherche zeigt sich, daß Costa und sein Team bereits im September 2017 einen Bericht mit dem Titel ,Design of a Bio-Inspired Autonomous Underwater Robot’ veröffentlicht haben, in welchem der Entwurf und die Herstellung eines schwimmenden Roboters sowie sein Navigationskontroll- und Leitsystem vorgestellt wurde, dessen Schwimmprinzip durch biologische Vorbilder aus der Familie der Kofferfische (Ostraciidae) inspiriert ist.
Beim seinem aktuellen Design orientiert sich Daniele Costa vor allem an solchen Fischen, die durch Schläge mit ihren Brustflossen vorankommen, wozu er gemeinsam mit dem Informationstechniker David Scaradozzi ein entsprechende Antriebssystem entwickelt. Bisher entwickelte Roboterfische benötigen bis zu vier Motoren, um die Flossen anzutreiben. Costas Modell kommt mit nur einem aus, indem die synchronen oder beliebig gegeneinander versetzten Schläge der Flossen mit einem mechanischen Getriebe erreicht werden, ebenso wie eine Änderung der Anstellwinkel.
Und während die meisten Unterwasserroboter ihre Richtung in einem Radius ändern, der um ein Vielfaches größer ist als ihre Länge, kann sich Costas Roboter auf der Stelle drehen, indem er seine Brustflossen gegenläufig bewegt. Im November 2022 folgt die Veröffentlichung ,Design of an Underwater Robot Propelled by a Novel Class of Bio-Inspired Thrusters’, die allerdings nicht offen einsehbar ist.
Im Juni 2022 stellt ein Forschungsteam der Sichuan University winzig kleine Fischroboter vor, die aus nanostrukturierten Materialien bestehen. Diese werden mit Laserlicht aktiviert, um die Fische anzutreiben, während das Material gleichzeitig im Wasser treibendes Mikroplastik absorbiert.
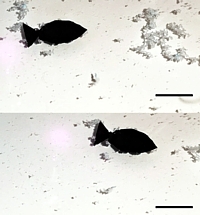
Fischroboter
Da Mikroplastik in Risse und Spalten fallen kann, war es bisher schwierig, es aus Gewässern zu entfernen. Eine Lösung, die vorgeschlagen wurde, ist der Einsatz kleiner, flexibler und autonomer Roboter, die diese Verunreinigungen erreichen und beseitigen können. Die herkömmlichen Materialien, die für weiche Roboter verwendet werden, sind jedoch Hydrogele und Elastomere wie Silikonkautschuk, die in Wasserumgebungen leicht beschädigt werden können.
Ein anderes Material wäre Perlmutt, das stark und flexibel ist und sich auf der Innenseite von Muschelschalen befindet. Perlmuttschichten weisen ein mikroskopisches Gefälle auf, das von einer Seite mit vielen Kalziumkarbonat-Mineral-Polymer-Verbindungen zur anderen Seite mit einem Füllstoff aus Seidenprotein verläuft. Inspiriert von dieser natürlichen Substanz probieren Xinxing Zhang und seine Kollegen eine ähnliche Art von Gradientenstruktur aus, um ein biegsames und gleichzeitig haltbares Material für weiche Roboter zu schaffen.
Hierzu verknüpfen sie β-Cyclodextrinmoleküle mit sulfoniertem Graphen, wodurch zusammengesetzte Nanoblätter entstehen. Anschließend werden Lösungen der Nanoblätter in unterschiedlichen Konzentrationen in Polyurethan-Latex-Mischungen eingearbeitet. Durch eine schichtweise Montagemethode (supramolekulare Multiskalenmontage) wird ein geordneter Konzentrationsgradient der Nanokomposite durch das Material hindurch erzeugt.
Das resultierende Nanokomposit, aus dem das Team einen winzigen Fischroboter mit einer Länge von 15 mm formt, besitzt eine ultrahohe Zähigkeit und nach einem Schnitt eine Selbstheilungseffizienz bei Raumtemperatur von 89 %, wobei die Fähigkeit, Mikroplastik zu absorbieren, beibehalten wird.
Durch schnelles Ein- und Ausschalten eines Nahinfrarot-Lasers, der auf den Schwanz des Fisches gerichtet ist, wird dieser zum Flattern gebracht, was den Proof-of-Concept-Roboter mit einer Geschwindigkeit von 2,67 Körperlängen pro Sekunde vorwärts treibt, was die Leistung der meisten künstlichen Softroboter übertrifft und ungefähr der Geschwindigkeit von aktivem Phytoplankton entspricht, das sich im Wasser bewegt.
Dabei nimmt der Fischroboter wiederholt Polystyrol-Mikroplastik in der Nähe auf und transportiert dieses an einen anderen Ort. Der entsprechende Artikel trägt den Titel ,Robust, Healable, Self-Locomotive Integrated Robots Enabled by Noncovalent Assembled Gradient Nanostructure’, ist aber nicht einsehbar.
Wie im Juli berichtet wird, haben die Professorin Kathleen A. Ritterbush und der Postdoktorand David J. Peterman an der University of Utah eine Reihe von Roboter-Ammoniten geschaffen, um herauszufinden, wie sich die verschiedenen Schalenformen, die ihre fossilen Vorbilder entwickelt haben, auf ihre Fortbewegung im Wasser auswirken.
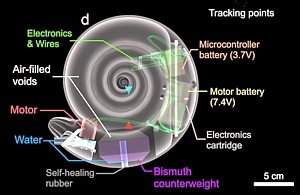
(Grafik)
Ammoniten traten vor etwa 400 Millionen Jahren erstmals auf und existierten bis vor rund 66 Millionen Jahren, als die am Ende der Kreidezeit gemeinsam mit den Dinosauriern im Zuge eines Massenaussterbens verschwanden. Ammoniten gehörten zur Gruppe der Kopffüßer, zu der heute auch Kraken, Tintenfische und Sepien gehören. Im Gegensatz zu diesen Vertretern hatten Ammoniten jedoch eine schützende Außenschale, die im Laufe der Aufzeichnungen aber nicht immer die gleiche Form aufwies.
Zu den Schalenformen gehören beispielsweise ein Serpenticon, das enge Quirle mit einer schmalen Schale kombiniert, ein Sphaerocone, das einige dicke Quirle und eine breitere, fast kugelförmige Schale aufweist, und ein Oxycone, das irgendwo dazwischen liegt und dicke Quirle mit einer schmalen, stromlinienförmigen Schale kombiniert.
Für die Untersuchungen werden freischwimmende Roboter-Ammoniten konstruiert, die jeweils aus einer 3D-gedruckten Polymerschale mit einer wasserdichten Innenkammer bestehen, in der sich die Batterien, ein Mikrocontroller, ein Motor und eine durch ein Flügelrad angetriebene Wasserpumpe befinden. Außerdem gibt es luftgefüllte Hohlräume und Gegengewichte, um die Gewichtsverteilung des existierenden Nautilus nachzubilden - dem einzigen heutigen Kopffüßer mit einer Schale.
Die Ergebnisse der Versuche, bei denen sich die einzelnen Modelle in einem Becken mehrfach den Weg durch das Wasser bahnen, zeigen jedoch, daß es nicht die eine optimale Schalenform gibt, sondern jede Form ihre eigenen Stärken und Schwächen hat: schmaleren Schalen erzeugen beispielsweise weniger Widerstand und sind stabiler, wenn sie sich gerade durch das Wasser bewegen, während die breiteren Schalen zwar langsamer und weniger energieeffizient sind, aber leichter die Richtung ändern können. Der Bericht mit dem Titel ,Resurrecting extinct cephalopods with biomimetic robots to explore hydrodynamic stability, maneuverability, and physical constraints on life habits’ ist im Netz einsehbar.
An der Yale University wiederum entwickeln Wissenschaftler unter der Leitung der Professorin Rebecca Kramer-Bottiglio einen sogenannten Amphibious Robotic Turtle (ART), wie im Oktober 2022 berichtet wird. Der Amphibien-Roboter imitiert eine Schildkröte, die neben ihrem Panzer über vier Gliedmaßen verfügt, diese aber in verschiedenen Lebensräumen auf verschiedene Art nutzt. Doch es gibt auch Unterschiede: Meeresschildkröten haben verlängerte Brustflossen zum Schwimmen, während Landschildkröten abgerundete Beine haben, die beim Laufen die Last tragen.

Indem die Gliedmaßen der tierischen Schildkröte mit Hilfe von speziellen polymeren Materialien nachgebildet werden, die ihre Form, Steifigkeit und ihr Verhalten an die Umgebung anpassen können, dienen die vier abstehenden Teile entweder als Schwimmflossen oder als Beine. Verstärkt wird diese Vielseitigkeit durch aufblasbare Aktuatoren, die Luftdruck in Bewegung umwandeln und so für zusätzliche Beweglichkeit sorgen.
In seinem ,beinigen’ Zustand kann ART das Land mit einer Vielzahl von vierbeinigen terrestrischen Gängen durchqueren. Erreicht er ein Gewässer, kann er seine Beine in Flossen umwandeln, die es ihm ermöglichen, mit auf Auftrieb und Widerstand basierenden aquatischen Bewegungen zu schwimmen.
Bei den Anwendungen konzentriert sich das Team auf die Überwachung von Ökosystemen entlang von Küsten, die Unterstützung von Tauchern und die Meereslandwirtschaft. Noch hat der Roboter allerdings einige Schwächen. So lassen sich die einzelnen Bewegungen nicht so präzise steuern wie gewünscht, und auch die Kalibrierung des Auftriebs muß noch verbessert werden.
Im November wird die Chemie-Studentin Eleanor Mackintosh Gewinnerin des ersten Natural Robotics Contest 2022, der Studenten und fachfremde Forscher dazu aufruft, nützliche biomimetische Roboter zu erfinden. Gestartet hatte den Wettbewerb im Sommer Robert Siddall von der University of Surrey in England, bewerben tun sich mehr als 100 Teilnehmer aus verschiedenen Ländern, darunter zahlreiche Teenager und Studierende aus Großbritannien und den USA.

Mackintoshs modularer Roboter, der aussieht und schwimmt wie ein Fisch, verwendet künstliche Kiemenstrukturen, um Mikroplastik aus dem Wasser zu filtern - ein großes Problem unserer Zeit mit verheerenden Konsequenzen für die Meerestiere. Hauptaufgabe des Gillbert genannten Roboter-Karpfens ist dabei allerdings nicht das Säubern des Gewässers, sondern die Probenentnahme: Filtersystemen gelingt es bislang nicht, zwischen Mikroplastik und Plankton zu unterscheiden. Indem die gesammelten Proben dann im Labor analysiert werden, gibt der Roboterfisch darüber Auskunft, wie verschmutzt das Wasser ist.
Die Umsetzung sieht so aus: Der 50 cm lange Roboter öffnet das Maul, läßt Wasser hereinströmen und schließt es dann wieder. Im geschlossenen Zustand drückt eine künstliche Zunge das Wasser durch die Kiemen, die mit einem Nylonnetz versehen sind. Alle Plastikpartikel mit einer Größe von mehr als 2 mm bleiben hängen. Die Flosse am hinteren Modul dient wie bei einem echten Fisch als Antrieb.
Tests mit dem per Kabel ferngesteuerten Prototypen in einem See zeigen, daß er sowohl an der Oberfläche schwimmen als auch tauchen kann. Die Schwimmgeschwindigkeit beträgt 5 cm/s bei einer Schweifschlagfrequenz von 2 Hz, wobei die Geschwindigkeit durch den hohen Widerstand des Filterkopfes und die relativ kleinen Antriebsmotoren begrenzt wird. Ein Problem bildete auch die Tendenz der Mundhöhle, Luft einzuschließen.
Zukünftig sollen das Design und die Steifigkeit der Schwanzflossen optimiert und eine Art Docking-Station gebaut werden, in der der sich der dann möglicherweise auch autonome Fischroboter wieder auflädt, während das gesammelte Plastik abgepumpt wird. Um dieses direkt bei der Probennahme zu analysieren, müßten die entsprechenden Instrumente allerdings noch sehr viel weiter miniaturisiert werden.
Der komplette Entwurf von Gillbert ist Open-Source und kann von der Website des Wettbewerbs heruntergeladen werden, so daß ihn jeder, der einen 3D-Drucker besitzt, selbst herstellen kann. Und unter dem Titel ,The Natural Robotics Contest: Crowdsourced Biomimetic Design’ gibt es ein 17-seitiges Skript, in welchem der Wettbewerb sowie die technischen Einzelheiten des Roboters ausführlich beschrieben werden. Im April 2023 geht der Natural Robotics Contest in die zweite Runde.
Auf der 6. IEEE-RAS International Conference on Soft Robotics (RoboSoft) in Singapur im April 2023 präsentieren Wissenschaftler der University of Bristol unter der Leitung des Doktoranden Tsam Lung You einen Roboterfisch, der sowohl energieeffizient als auch einigermaßen schnell ist. Sein Antriebsmittel ist ein neues Schwanzschlagsystem, das die modifizierte Version eines Mechanismus nutzt, der als verdrilltes und gewundenes Polymer (Twisted and Coiled Polymer, TCP) bekannt ist.
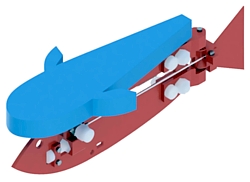
TCPs haben die Form eines gewickelten Kabels, ähnlich wie die Hörerschnur eines Festnetztelefons. Wenn das Kabel erhitzt wird, zieht es sich zusammen wie ein Muskel. Wird die Wärme entfernt, entspannt sich die Leitung wieder und nimmt ihre Standardlänge an. Eine Einschränkung besteht darin, daß solche Anordnungen nicht sehr schnell wiederholende Bewegungen ausführen können, da es mindestens eine Sekunde dauert, bis sie sich wieder zusammenziehen.
Um dieses Problem zu beheben enthält der Unterwasserroboter sowohl einen TCP aus leitfähigem Garn als auch eine herkömmliche Stahlspiralfeder, die sich nebeneinander über die gesamte Länge des Roboters erstrecken. An der Vorderseite des Roboters sind sie über ein Gestänge miteinander verbunden, und hinten mit den gegenüberliegenden Seiten eines Schwanzschlagmechanismus.
Wird ein elektrischer Strom an den TCP angelegt, erwärmt er sich und zieht sich zusammen, wodurch der Schwanz zu einer Seite gezogen und die Schraubenfeder gedehnt wird. Wenn der Strom aufhört und der TCP sich entspannt, zieht sich die gespannte Feder zusammen und zieht das Heck auf die andere Seite. Wenn das Ende des Schwanzes auf dieser Seite erreicht ist, ist der TCP bereit, sich zusammenzuziehen und ihn wieder zurückzuziehen. In Wassertank-Tests erreicht der Roboter mit einer Schwanzschlagrate von 2 Hz eine maximale Schwimmgeschwindigkeit von 25,7 mm/s, was 11,5 % seiner entspricht.
Als nächste wollen die Wissenschaftler die Technologie in einen wendigeren Roboter-Messerfisch einbauen, der über eine schneckenartige Flosse verfügt, die über die gesamte Länge seiner Unterseite verläuft. TCP-Aktoren sind vielversprechend, da sie sich durch ihr geringes Gewicht, ihre niedrigen Kosten, ihre hohe Energiedichte und ihren einfachen Herstellungsprozeß auszeichnen. Die Studie ,Robotic Fish driven by Twisted and Coiled Polymer Actuators at High Frequencies’ ist im Netz abrufbar.
Ebenfalls im April berichtet ein Forschungsteam des Max-Planck-Instituts für intelligente Systeme (MPI-IS) um Metin Sitti über einen weiteren Ansatz, gegen den Müll in den Meeren vorzugehen. In der Arbeit ,A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation’, die im Netz einsehbar ist, beschreiben sie eine Roboter-Qualle, die sich auf ähnliche Art und Weise wie ihr biologisches Pendant fortbewegt und dabei helfen soll, Verschmutzungen auf dem Meeresboden zu beseitigen.

Schätzungsweise 70 % des Meeresmülls sinkt auf den Boden der Ozeane. Davon sind ca. 60 % Kunststoff-Abfälle, die dort für mehrere Hundert Jahre verbleiben. Der etwa handgroße JellyfishBot, der sich leise und energieeffizient unter Wasser fortbewegen kann, könnte Teile davon an die Meeresoberfläche befördern, ohne den Müll überhaupt berühren zu müssen.
Der Roboter besteht aus mehreren weichen und starren Polymerschichten: Einige stabilisieren den Roboter, andere machen ihn schwimmfähig, dichten ihn ab oder fungieren als Schwimmhaut. In der Mitte der Schichten sind elektrohydraulische künstliche Muskeln eingebettet, sogenannte HASELs (Hydraulically Amplified Self-Healing Electrostatic). Dies sind mit Pflanzenöl gefüllte Kunststoffbeutel, die teilweise von Elektroden bedeckt und von Luftkissen umgeben sind.
Durch Anlegen einer Hochspannung an eine Elektrode wird der Muskel positiv aufgeladen, während das umgebende Wasser negativ geladen ist. Dadurch entsteht eine Kraft zwischen der positiv geladenen Elektrode und dem negativ geladenen Wasser, die das Öl innerhalb des Beutels hin- und herschiebt, wodurch sich die Beutel zusammenziehen – ähnlich wie ein echter Muskel. Indem der Strom periodisch durch dünne Drähte fließt, ziehen sich die Muskeln zusammen und dehnen sich wieder aus. Dadurch kann der Roboter schwimmen und Strudel unter seinem Körper erzeugen.
Der geräuschlose Prototyp mit einem Durchmesser von 16 cm erreicht eine Geschwindigkeit von bis zu 6,1 cm/s und benötigt nur eine geringe Leistung von etwa 100 mW. Er läßt das Wasser um sich herum zirkulieren und steuert die Flüssigkeitsströmung, um sich fortzubewegen, während er Objekte, die unter seinem Körper gehalten werden sollen, ohne physischen Kontakt manipuliert. Der Abfall wird von den Strömungen um den Roboter herum nach oben transportiert, wo er abgesaugt und recycelt werden kann. Der JellyfishBot kann auf diese Weise aber auch Nährstoffe und biologische Proben wie etwa Fischeier nach oben transportieren.
Die Roboter sind außerdem in der Lage, kooperativ zu arbeiten und
gemeinsam auch schwere Lasten wie Flaschen zu bergen. Allerdings agieren
sie bisher nur eingeschränkt autark, da sie ein Stromkabel benötigen.
Um in Zukunft drahtlose Manipulationen zu ermöglichen, werden bereits
Tests mit Batterien und drahtlosen Steuerungseinheiten durchgeführt.
Um die Mechanik des metachronalen Schwimmens besser zu verstehen, tun sich Forscher um Prof. Monica M. Wilhelmus und Sara Oliveira Santos von der Brown University in Rhode Island mit Kollegen der Universidad Nacional Autónoma de México zusammen. Bei dieser Art der Fortbewegung, die auch von Gliederfüßern wie Garnelen und Krebsen genutzt wird, werden aufeinanderfolgende Bewegungswellen von hinten nach vorne durch Reihen von Schwimmbeinen auf der Unterseite des Tieres gesendet, die auch Pleopoden oder Swimmerets genannt werden.
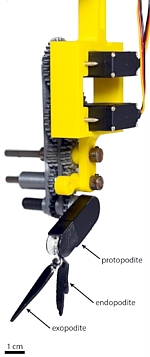
Wie die Forscher in der im Juni 2023 veröffentlichten und im Netz einsehbaren Studie ,Pleobot: a modular robotic solution for metachronal swimming’ beschreiben, haben sie gemeinsam eine Roboterplattform namens Pleobot entwickelt, die sowohl dem Verständnis der krillähnlichen Schwimmmethode als auch als Grundlage für den Bau manövrierfähiger Unterwasserroboter dienen soll. Krill hat die Forscher zum Bau inspiriert, weil die 5 cm großen Krustentiere das Schwimmen, Beschleunigen, Bremsen und Wenden meisterhaft beherrschen.
Ein Hauptziel des Projekts ist das Verständnis davon, wie metachrone Schwimmer wie der Krill in komplexen Meeresumgebungen funktionieren und massive vertikale Wanderungen von über 1.000 m zweimal täglich durchführen. Immerhin führt die metachrone Schwimmtechnik, die der Krill oft durch aufeinanderfolgenden Einsatz seiner Schwimmbeine in einer wellenartigen Bewegung zeigt, zu einer bemerkenswerten Manövrierfähigkeit.
Der Pleobot, der zehnmal so groß ist wie ein echter Krill, besteht aus einer künstlichen Pleopode, die aus zwei 3D-gedruckten Segmenten besteht. Während das obere Segment durch ein angetriebenes Getriebesystem vorwärts und rückwärts bewegt wird, schwingt das untere Segment passiv durch das Wasser hin und her und simuliert so die Art und Weise, wie sich echte Pleopoden nacheinander öffnen und schließen. Dadurch lassen sich verschiedene Konfigurationen untersuchen, um Messungen und Vergleiche durchzuführen, die mit lebenden Tieren nicht möglich sind.
Obwohl noch weitere Forschungen durchgeführt werden müssen, bevor komplette Krillroboter gebaut werden können, hat der Pleobot bereits geholfen herauszufinden, wie der Krill beim Vorwärtsschwimmen Auftrieb erzeugen kann. So zeigte die Plattform, wie ein Niederdruckbereich am hinteren Ende des Pleopods die Auftriebskraft erhöht, wenn sich das Anhängsel durch seinen Kraftschlag bewegt.
Die Studie ist der Ausgangspunkt für das langfristige Forschungsziel, die nächste Generation von autonomen Unterwasserfahrzeugen zu entwickeln, denn die Forscher glauben, daß der Pleobot ein breites Spektrum von Disziplinen ansprechen wird, von wissenschaftlichen Studien in den Bereichen Ökologie, Biologie und Ingenieurwesen, über den Einsatz als Schwarmsysteme zur Teilnahme an Such- und Bergungsmissionen, bei denen große Gebiete abgedeckt werden müssen, bis hin zur Erforschung der Ozeane von Monden im gesamten Sonnensystem.
Ein Team unter der Leitung von Prof. Néstor O. Pérez-Arancibia und dem Doktoranden Conor K. Trygstad an der Washington State University (WSU) entwickelt gemeinsam mit Xuan-Truc Nguyen von der erst 2020 gegründeten Firma Flyby Robotics aus Los Angeles die winzige Roboter-Version eines Wasserläufer, wie im Januar 2024 gemeldet wird (,A New 1-mg Fast Unimorph SMA-Based Actuator for Microrobotics’).

Der WaterStrider genannte Roboter, der sich ebenso wie sein lebendiges Vorbild mit Hilfe der Oberflächenspannung über das Wasser bewegen kann, ist 22 mm lang und wiegt nur 56 mg. Sein größtenteils aus Kohlefasern bestehender Körper verfügt über vier scheibenförmige Füße, die die Oberflächenspannung aufrechterhalten und verhindern, daß er untergeht.
Der interessanteste Teil des Roboters ist der unimorphe Formgedächtnisaktuator, der seine beiden Arme/Flossen bewegt. Mit einer Länge von 7 mm, einem Volumen von 0,45 mm3 und einem Gewicht von 0,96 mg ist er dem Team zufolge das kleinste Gerät seiner Art, das jemals hergestellt wurde. Es erreicht eine Betriebsfrequenz von bis zu 40 Hz und kann das 155-fache seines Eigengewichts anheben.
Der Aktuator besteht aus zwei winzigen Drähten aus der Nickel-Titan-Legierung Nitinol, die sich bei ihrer Erwärmung durch elektrischen Strom zusammenziehen und bei der Abkühlung, wenn der Strom aufhört, wieder in ihren ,gespeicherten’ längeren Grundzustand zurückkehren.

im Größenvergleich
Durch Anlegen eines pulsierenden elektrischen Stroms ist es daher möglich, die Drähte schnell zwischen ihren beiden Zuständen hin- und herwechseln zu lassen, wobei die angeschlossenen Arme flattern. Auf diese Weise ist der WaterStrider in der Lage, seine Arme bis zu 40 Mal pro Sekunde zu bewegen und mit einer Geschwindigkeit von etwa 6 mm/s über die Wasseroberfläche zu ,paddeln’. Das Team arbeitet nun daran, die bislang externe Energieversorgung in den Roboter selbst einzubauen.
Außerdem wird ein kleinerer und einfacherer Roboter-Crawler namens MiniBug gebaut, der 8,5 mm lang ist, sich mit einer Geschwindigkeit von bis zu 0,76 Körperlängen pro Sekunde fortbewegen kann und mit nur 8 mg als der leichteste voll funktionsfähige krabbelnde Mikroroboter seiner Art gilt, der je entwickelt wurde.
Zur Erinnerung: Das Harbin Institute of Technology hatte bereits im
Juni 2011 einen
Wasserläufer-Mikroroboter vorgestellt (s.d.) - und im Zuge einer
weiterführenden Recherche zeigt sich, daß auch ein Team der Harvard
University und der Seoul National University (SNU)
um die Professoren Kyu Jin Cho, Kim Ho-Young und Robert
Wood an einem ähnlichen Roboterinsekt arbeitet. Cho und
seine Kollegen berichten darüber erstmals im November 2013 während
der International Conference on Intelligent Robots and Systems in
Tokio.

der SNU
Um die Mechanik zu verstehen, mit der die Insekten in der Lage sind, mit der gleichen Kraft aus dem flüssigen Wasser oder vom festen Boden aus die gleiche Sprunghöhe zu erreichen, analysieren die Forscher Videoaufnahmen der entsprechenden Bewegungen. Dabei entdecken sie, daß die Insekten eine schwungvolle Bewegung ausführen, die eine maximale Kraft ausübt, die genau unter dem Wert liegt, der die Wasseroberfläche durchbrechen würde.
Nach einigen Prototypen wird im Juli 2015 ein Roboterinsekt mit einem Drehmomentumkehr-Katapultmechanismus ohne intelligente Steuerung vorgestellt (,Jumping on water: Surface tension–dominated jumping of water striders and robotic insects’). Der Körper des Roboters besteht aus sich selbst zusammensetzenden, faltbaren Komponenten, wie man sie in Pop-up-Büchern findet. Dieses Schichtungs- und Faltungsverfahren war von Ingenieuren der Harvard Paulson School und des Wyss-Instituts entwickelt worden und ermöglicht die schnelle Herstellung von Mikrorobotern und einer breiten Palette von elektromechanischen Geräten.
Damit sich das Roboterinsekt aus dem Wasser katapultieren kann, nutzt der leichte Katapultmechanismus einen Impuls in Verbindung mit einer begrenzten Schubkraft, wobei zu seiner Aktivierung ein automatischer Auslösemechanismus verwendet wird, der aus Verbundwerkstoffen und Aktuatoren besteht. Beim Abspringen übt der winzige Roboter einen Druck des 16-fachen seines Körpergewichts auf die Wasseroberfläche aus, ohne sie zu beschädigen.

Im Juli 2018 berichten die Forscher des Wyss Institute der Harvard University, daß sie zwischenzeitlich eine Roboterschabe entwickelt haben, die Unterwasserumgebungen erkunden kann. In der Natur können Kakerlaken bis zu 30 Minuten unter Wasser überleben. Der Harvard Ambulatory Microrobot (HAMR) kann an Land herum laufen, auf der Wasseroberfläche schwimmen und - besser als sein lebendiges Vorbild - so lange wie nötig unter Wasser bleiben.
Die erste Generation des quadrupedalen Roboters HAMR, der auf dem Pop-up-Verfahren des Instituts zur Herstellung mikroelektromechanischer Systeme (MEMS) basiert, war schon im Juni 2013 öffentlich vorgestellt worden. Der damalige HAMR maß etwa 4,4 cm in der Länge, wog ca. 1,5 g und war noch an Kabel angeschlossen. Und schwimmen konnte er auch nicht. Er wird in den Folgejahren aber immer weiter fortentwickelt.
Die neue Generation, die uns hier interessiert, verwendet multifunktionale ,Fußballen’, die sich auf die Oberflächenspannung und den durch die Oberflächenspannung verursachten Auftrieb verlassen, wenn der HAMR schwimmen will, aber auch eine Hochspannung anlegen können, um die Wasseroberfläche zu durchbrechen, wenn er sinken muß. Dieser Prozeß wird als Elektrobenetzung (Electrowetting) bezeichnet und bedeutet die Verringerung des Kontaktwinkels zwischen einem Material und der Wasseroberfläche unter einer angelegten Spannung, was den Objekten erleichtert, die Wasseroberfläche zu durchbrechen. Um Kurzschlüsse unter Wasser zu vermeiden, ist der Roboter mit Parylene beschichtet.
Auf der Wasseroberfläche bewegt sich der Mikroroboter mit Hilfe von vier asymmetrischen Klappenpaaren und speziell entwickelten Schwimmschritten. Um effektiv vorwärts zu schwimmen und zu wenden, wird die unstete Interaktion zwischen den passiven Klappen des Roboters und dem umgebenden Wasser genutzt. Unter der Wasseroberfläche benutzt HAMR die gleiche Gangart wie an Land und ist genauso mobil.
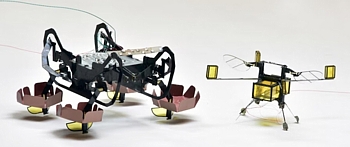
Danach aus dem Wasser heraus zu kommen, ist jedoch eine enorme Herausforderung. Die Oberflächenspannung des Wassers ist doppelt so groß wie das Gewicht der HAMR, und das induzierte Drehmoment führt zu einem dramatischen Anstieg der Reibung an den Hinterbeinen des Roboters. Nachdem das Getriebe versteift und an den Vorderbeinen des Roboters weiche Polster installiert werden, um die Tragfähigkeit zu erhöhen und die Reibung beim Klettern umzuverteilen, gelingt es HAMR, eine leichte Steigung hinaufzugehen und sich aus dem Wasser zu befreien.
Der Schlüssel zu seiner Leistung ist die Größe des HAMR: Er wiegt 1,65 g, kann 1,44 g zusätzliche Nutzlast tragen, ohne zu sinken, und kann mit seinen Beinen mit einer Frequenz von bis zu 10 Hz paddeln. Wäre er viel größer, wäre es schwierig, den Roboter mit der Oberflächenspannung zu unterstützen, und wäre er viel kleiner, bräuchte er signifikant mehr Kraft, um sie zu durchbrechen. Als Nächstes wollen die Forscher die Fortbewegung des HAMR weiter verbessern und einen Weg finden, um ohne Rampe an Land zurückzukehren, vielleicht unter Verwendung von Gecko-inspirierten Klebstoffen oder impulsiven Sprungmechanismen.
Im Übrigen schließt sich der HAMR dem Harvard-Mikroroboter RoboBee an, der zwischen Luft und Wasser wechseln kann und dessen Entwicklung ausführlich in der Jahresübersicht 2013 der Elektro- und Solarfluggeräte dokumentiert wird (s.d.).
Um in diesem Kontext zu bleiben sei hier auf zwei weitere Ansätze
verwiesen, über die im Jahr 2021 berichtet wird.
So beschreiben Wissenschaftler der Michigan Technological
University und der University of Massachusetts,
Amherst um Prof. Hassan Masoud und Mitchel
L. Timm im Oktober in ihrer Studie ,A remotely controlled
Marangoni surfer’ über die Konstruktion eines winzigen, geräuschlosen,
wasserlaufenden Roboters, der den Maragoni-Effekt nutzt,
der als „Massentransfer entlang einer Grenzfläche zwischen zwei
Flüssigkeiten aufgrund eines Gradienten der Oberflächenspannung“ beschrieben
wird.
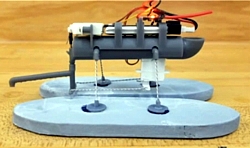
Wasserläufer
Wasserläufer machen sich diesen Effekt zunutze, indem sie wasserunlösliche Verbindungen, so genannte Lipide, absondern, die ein Ungleichgewicht der Oberflächenspannung erzeugen, das sie nach vorne zieht. Der kleine selbstangetriebene und praktisch geräuschlose Roboter, der auf nebeneinander liegenden, pontonartigen Schwimmern sitzt, funktioniert auf die gleiche Weise - erzeugt das Ungleichgewicht der Oberflächenspannung aber nicht durch Lipide, sondern nutzt für den Antrieb die kontrollierte Freisetzung von Isopropylalkohol.
Diese Flüssigkeit befindet sich im zylindrischen Körper des Bots und wird aus einer horizontal schwenkbaren Düse am Heck abgegeben. Durch Fernsteuerung der Richtung, in die die Düse gerichtet ist, kann der Roboter in Echtzeit gesteuert werden, wobei seine Geschwindigkeit über die Durchflußmenge des Alkohols geregelt wird. Hierzu hatte das Team maßgeschneiderte Strömungssteuerungs- und Lenkmechanismen entwickelt, welche die integrierten Energie- und Kraftstoffquellen, einen Fernsender, einen Empfänger und zwei Servos ergänzen, wodurch ein kabelloser Roboter-Surfer mit hoher Funktionalität entsteht.
In seiner jetzigen Form erreicht dieser eine Höchstgeschwindigkeit von etwa 100 mm/s und eine Kraftstoffeffizienz von etwa 600 mm pro Milliliter Alkohol, was in Zukunft durch alternative Designs und Treibstoffe verbessert werden soll. Das Team um Masoud hatte übrigens schon im September 2020 unter dem Titel ,Forward, reverse, and no motion of Marangoni surfers under confinement’ eine theoretische Analyse über den Marangoni-Antrieb vorgelegt, bevor mit dem Bau eines Prototypen begonnen wurde.
Dazu sollte angemerkt werden, daß es bereits in den 1950er und 1960er Jahren
kleine Boote und noch winzigere Schwäne für Modellbauer gab, die auf
einen transparenten, ovalen Stück Plastik saßen, das hinten eine kleine
Vertiefung hatte. In dieser befand sich etwas Watte sowie ein Baumwollfaden,
der daraus bis auf die Wasseroberfläche führte. Sobald man einen Tropfen
Alkohol auf die Watte träufelte, begann das Boot oder der Schwan lustige
Kreise auf dem See der Modelleisenbahnanlage oder jeder anderen Wasserfläche
zu drehen.
Das Funktionsprinzip ist als chemischer Antrieb durch Oberflächenspannungsänderung bekannt, denn der Alkohol verdampft auf der Wasseroberfläche und verändert lokal die Oberflächenspannung des Wassers - und Wasser mit unterschiedlicher Oberflächenspannung erzeugt den erwähnten Marangoni-Effekt, der wiederum eine gerichtete Bewegung des Boots oder Schwans verursacht. Leider konnte ich bislang keine Abbildungen dieser Spielzeuge finden.
Bereits im Dezember 2021 folgen Berichte über einen Neusbot, der von den Forschern Zhiwei Li, Nosang Vincent Myung und Yadong Yin an der University of California - Riverside und der University of Notre Dame entwickelt wird und nach der Neuston-Kategorie von Tieren benannt ist, die sich an der Wasseroberfläche oder knapp darunter aufhalten und zu denen auch die Wasserläufer zählen. Der Name ist von neustos abgeleitet, was auf griechisch schwimmend bedeutet.
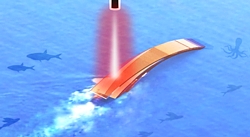
(Grafik)
Der Körper des Neusbot, der sowohl von der Dampfmaschine als auch von einem Insekt inspiriert ist, ist 20 mm lang, 5 mm breit und hat die Form einer flachen dreischichtigen Folie. Die oberste Schicht besteht aus klarem Polyimid-Kunststoff, die mittlere aus einem porösen Hydrogel und die unterste aus dem Polymer Polydimethylsiloxan (PDMS).
Im Hydrogel integrierte Eisenoxid- und Kupfernanostäbchen wandeln Lichtenergie in Wärme um, die das vom Gel absorbierte flüssige Wasser verdampft. Der Dampf bildet eine Blase im Gel, die mechanischen Druck und Wärmeenergie auf die obere und untere Schicht des Films ausübt. Da das Polyimid oben einen geringeren Wärmeausdehnungskoeffizienten hat als das PDMS unten, biegt sich die Folie nach oben. Sobald die Blase platzt, flacht die Folie wieder ab, biegt sich aber erneut, wenn sich die nächste Blase bildet. So kann sich der Neusbot durch kontinuierliche Schwingungen über die Wasseroberfläche bewegen.
Bei der derzeitigen Laboranordnung, bei der das Licht in Form eines Laserstrahls zugeführt wird, kann der Roboter durch Ändern des Winkels dieses Strahls dazu gebracht werden, sich nach links oder rechts zu drehen. Dabei erreicht er eine Höchstgeschwindigkeit von etwa 1,3 mm/s.
Das Team hofft, daß letztlich viel größere, mit Sonnenlicht betriebene Neusbots mit einer vierten Schicht aus ölabsorbierendem Material ausgestattet werden können, um auf Ölteppichen eingesetzt werden, wo sie sich selbständig fortbewegen und anschließend aus dem Wasser geborgen werden, um das Öl zu extrahieren. Die Studie ,Light-powered soft steam engines for self-adaptive oscillation and biomimetic swimming’ ist im Netz einsehbar.
Abschließend soll auf die einsehbare Veröffentlichung ,Revolutionizing Aquatic Robotics: Advanced Biomimetic Strategies for Self-Powered Mobility Across Water Surfaces’ vom Juni 2024 verwiesen werden, in welcher die Forscher Anwar Elhadad, Yang Gao und Seokheun Choi von der State University of New York in Binghamton über einen Roboter, der sich mittels Stabilitätsmechanismen, die von Wasserläufern inspiriert sind, effizient über Wasseroberflächen bewegen kann.
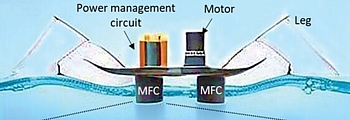
(Grafik)
Besonders interessant ist, daß der Roboter die Bewegung des Wasserläufers mit einem Motor nachahmt, der durch einen mikrobiellen Stoffwechsel angetrieben wird. Bei dem innovativen, autarken Energiesystem werden organische Materialien, die in der aquatischen Umwelt vorkommen, mittels der mikrobiellen Brennstoffzellentechnologie (MFC) durch katalytische Redoxreaktionen in Strom umgewandelt.
Um die Lebensdauer der MFC zu verlängern, wird der sporenbildende Bacillus subtilis als anodischer Biokatalysator verwendet, der die Fähigkeit besitzt, rauhen Bedingungen standzuhalten und sich in günstigen Umgebungen zu reaktivieren. Und für die ständige Versorgung mit organischen Substraten ist eine biomimetische Janus-Membran mit asymmetrischer Oberflächenbenetzbarkeit integriert.
Auch wenn noch weitere Experimente und Untersuchungen notwendig sind, besonders zur langfristigen Betriebsfähigkeit des Systems, seiner vollständigen Autarkie unter wechselnden Umweltbedingungen und seiner Zuverlässigkeit, stellt diese Arbeit die erste Demonstration des Potentials der Miniatur-MFC-Technologie für den Betrieb von Robotern mit hohem Energiebedarf in aquatischen Umgebungen dar.
Unabhängig von diesen Robots, die sich primär auf der Wasseroberfläche bewegen sollen, gibt es noch multimodale Unterwasserfahrzeuge mit Fischcharakter, wie beispielsweise der Unterwasserroboter HERO-BLUE, der seine Flossen zum Schwimmen, Laufen und Krabbeln nutzen kann. Der Name ist ein Akronym für ,Hazardous and Extreme environment RObot for Biomimetic multiLocomotion-based Underwater Expedition’.
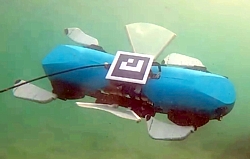
Die experimentelle Entwicklung von Prof. Son-Cheol Yu und seinen Kollegen an der Pohang University of Science and Technology in Südkorea wird in ihrem Artikel ,Development of Bioinspired Multimodal Underwater Robot “HERO-BLUE” for Walking, Swimming, and Crawling’ beschrieben, der im Januar 2024 erscheint. Zu den Aufgaben des Roboters gehören z.B. die Erkundung versunkener Schiffe und die Inspektion von Unterwasserstrukturen. Obwohl er im Moment noch per Kabel ferngesteuert wird, verfügt er über zwei Kameramodule an der Vorderseite für stereoskopische Sicht, was ihm eines Tages einen autonomen Betrieb ermöglichen soll.
In seiner derzeitigen Proof-of-Concept-Form mißt HERO-BLUE 80 cm Länge, 60 cm Breite und 30 cm Höhe und wiegt 11,3 kg. Er verfügt über vier multimodale Flossen, zwei vorne und zwei hinten, sowie über zwei seitliche Flossen, eine auf jeder Seite in der Mitte des Körpers. Jede der Flossen besteht aus mehreren Polymerplatten, die durch elastomere ,Sehnen’ miteinander verbunden sind. Sie sind so konstruiert, daß die Flosse starr bleibt, wenn eine Kraft in eine Richtung ausgeübt wird, aber flexibel wird, wenn eine Kraft in die andere Richtung wirkt.
Die seitlichen Flossen bestehen jeweils aus einer Elastomermembran, die zwischen zwei starren Stangen aufgehängt ist, eine an jedem Ende der Membran. Wenn der HERO-BLUE schwimmt, schlagen die multimodalen Flossen auf und ab, genau wie die Brustflossen eines Fisches. Auch die Seitenflossen können bei Bedarf für feinere Manöver eingesetzt werden und bewegen sich wellenförmig wie die Unterseite der Flosse eines Messerfisches.
Bei starker Strömung ist das Schwimmen jedoch nicht immer möglich. In solchen Fällen nutzt der Roboter seine integrierten Auftriebsregler, um auf den Grund zu sinken, wo er dann seine multimodalen Flossen verwendet, um auf Kies, Sand oder anderem Unterwassergelände zu laufen. In diesem Modus bleibt jede Flosse starr, wenn sie den Körper des Roboters nach vorne zieht, und wird flexibel, wenn sie wieder nach vorne gezogen wird, um den nächsten Schritt zu machen.
Auch Schwimmen ist in sehr flachem Wasser unmöglich, weshalb der HERO-BLUE eine vom Salamander inspirierte Wirbelsäule besitzt, die sich am Hüftgelenk zwischen dem vorderen und hinteren Teil des Roboterkörpers nach links und rechts biegen läßt. Auf diese Weise kann der Roboter seinen Körper vor- und zurückdrehen und sich so auch gegen eine relativ starke Strömung vorwärts winden.

In der einsehbaren Studie ,A jelly-like artificial muscle for an untethered underwater robot’, die im Mai 2024 erscheint, beschreibt ein großes Team der chinesischen Zhejiang University und der Universiti Teknologi Malaysia in Johor Bahru die Entwicklung eines vielseitigen und kontrollierbaren Unterwasserroboters mit einem geleeartigem Muskel aus einer extrem weichen und wäßrigen Struktur mit einem Wassergehalt von 83,3 %.
In Anlehnung an die schnellen Kontraktionseigenschaften von Quallen kann der künstliche Muskel sofort auf elektrische Reize reagieren und für den Unterwasserantrieb sorgen. Dabei kann er die Antriebsrichtung durch einfaches Abstimmen des Spannungssignals ändern. Und durch Stimulierung des Muskels mit einem bordeigenen Stromsystem ist ein ungefesselter Betrieb möglich. Außerdem können durch die Anpassung des geleeartigen Muskels Roboter in verschiedenen Formen gebaut werden.
Der aktuell vorgestellte Unterwasserroboter erreicht eine Höchstgeschwindigkeit von 0,91 cm/s, was 0,3 Körperlängen pro Sekunde entspricht, und hat mit einer 500 mAh Lithium-Ionen-Batterie eine Ausdauer von 15,7 Minuten.
Im Juni 2024 berichten die Blogs, daß das robotergesteuerte,
riesige Tauchboot Manta Ray von Northrop Grumman seine
ersten Testtauchgänge macht. Das Militärgerät der DARPA wird hier erwähnt,
weil es zum einen rein elektrisch angetrieben ist und zum anderen tatsächlich
wie ein gigantischer Mantarochen aussieht, zumindest
in der Aufsicht. Im Netz gibt es aber genügend Material darüber, so
daß dieses hier nicht wiederholt werden muß.
Im Juli 2025 stellen Prof. Mihai ,Mishu’ Duduta und sein Team an der University of Connecticut einen weiteres weiches Robotersystem vor, das von der Jet-Antriebsmechanik der Kopffüßer inspiriert ist. Der RoboNautilus, der die einzigartige Anatomie und Strömungsdynamik dieser Meerestiere nachahmt, wird vollständig von dielektrischen Elastomeraktoren (DEAs) angetrieben, die eine effiziente und geräuscharme Unterwasserfortbewegung erlauben.
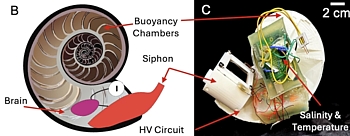
(Grafik & Modell)
Ähnlich wie das rhythmische Ausdehnen und Zusammenziehen der weichen Kopffüßer-Mantelhöhle Wasser ansaugt und kräftig ausstößt, verwendet der vollständig integrierte, in sich geschlossene Unterwasserroboter mehrschichtige DEAs, um einen Wasserstrahl durch einen weichen Siphon anzutreiben. Diese Festkörperaktoren verformen sich als Reaktion auf Hochspannung und machen starre Motoren oder sperrige Hydrauliksysteme überflüssig, während die Steuerung, Effizienz und kompakte Bauweise erhalten bleiben.
Die Hülle des RoboNautilus wird im 3D-Druckverfahren nach dem Vorbild der Nautilus belauensis entworfen, wobei die inneren Kammern so umstrukturiert werden, daß sie die Elektronik und Lufttaschen für den Auftrieb und die passive Selbstaufrichtung aufnehmen können. Eine weiche DEA-Membran, die an der vorderen Düse angebracht ist, ahmt den Mantel des Tieres nach. Bei Energiezufuhr bläst sich die Membran zyklisch auf und zieht sich zusammen, wobei sie Wasser ansaugt und ausstößt, um Schub zu erzeugen.
Der RoboNautilus ist in der Lage, kontinuierlich zu schwimmen, an Bord Sensoren einzusetzen und die Umwelt zu überwachen. Hierzu verfügt er über eine integrierte Kamera sowie Temperatur- und Salzgehaltssensoren. Die Studie unter dem Titel ,RoboNautilus: a cephalopod-inspired soft robotic siphon for underwater propulsion’ ist im Netz einsehbar.
Nach diesem überaus umfangreichen Schwerpunkt geht es nun weiter mit der allgemeinen Jahresübersicht:
Im April 2012 erscheint in den Blogs ein persönlicher Wasserantrieb für Surfer, die sich damit nicht mehr von einem Wassermotorrad schleppen lassen müssen. Der von Mike Railey erfundene WaveJet erlaubt es, durch eine wenig Motorleistung bis zu viermal schneller zu paddeln als mit reiner Muskelkraft und so die Geschwindigkeit und Kraft zu erhalten, die man braucht, um eine große Welle zu erwischen.

Der patentierte WaveJet selbst ist ein Pod, der so konzipiert ist, daß er schnell in Boards aller Art eingebaut werden kann - Surfbretter, Paddleboards, Boogieboards und Rettungsboards. Das schlanke Zusatzgerät wird flach an der Unterseite des Boards angebracht, so daß er nicht beim Fahren stört. Zwei Aluminiumimpeller sorgen für bis zu 9 kg Schub und eine Geschwindigkeit von 19,3 km/h.
Gesteuert wird die Leistung über eine drahtlose Fernbedienung, die der Surfer am Handgelenk trägt. Das Armband überwacht auch den Batteriestand des wiederaufladbaren Lithium-Ionen-Akkus, der eine Laufzeit von 30 - 45 Minuten hat. Da man ihn nicht jedoch die ganze Zeit aktiv benutzt, bedeutet das viel mehr tatsächliche Zeit auf dem Wasser.
Der WaveJet wurde zwar von großen Wellen inspiriert, aber das System ist auch außerhalb des Surfens nützlich. Wenn es in z.B,. Rettungsbrettern eingebaut wird, können Rettungsschwimmer schneller zu den Opfern gelangen und gleichzeitig Energie sparen. Ebenso kann das Pod als leichter Motor an einem Kajak oder Boot eingesetzt werden.

im Einsatz
Die erste kommerzielle Serie will das 2002 gegründete Unternehmen WaveJet Technologies mit Sitz in Midrand, Südafrika, bereits in diesem Mai für 2.500 $ auf den Markt bringen. Pakete für Freizeit-Boards beginnen bei 4.395 $ und Pakete für Rettungs-Boards bei 4.150 $.
Im August 2014 folgen Berichte, denen zufolge die Firma ein neues Board für Angler auf den Markt gebracht hat. Das Pau Hana Big EZ Angler ist ein jetbetriebenes Stand-up-Paddleboard, das Anglern eine neue Möglichkeit bietet, leise durch die lokalen Angelgewässer zu gleiten, Untiefen und flache Gewässer zu erreichen und den Fang schnell ans Ufer zu bringen.
Das Board 3,4 m lang und 81 cm breit und verfügt über ein Schaumstoff-Deck für stabilen Halt. Integrierte Verankerungspunkte ermöglichen die Befestigung von Kühlboxen, Stühlen, Angelkisten u.ä.m., zudem gibt es ein Befestigungssystem für eine LED-Beleuchtung, um das Nachtfischen zu erleichtern. Das WaveJet Pau Hana Angler-Kit kostet 4.995 $. Beim jüngsten Update 2025 läßt sich Firma aber nicht mehr finden, sie scheint sang- und klanglos untergegangen zu sein.
Auf der slowenischen Messe Internautica im
Mai 2012 wird
ein neues, rein elektrisches Tragflächenboot mit zwei ergonomischen
Sitzen vorgestellt, das eine Kreuzung zwischen einem Jet-Ski und einem
Boot darstellt. Die Resonanz ist so erfolgreich, daß noch in diesem
Jahr eine Kleinserie von 100 Exemplaren produziert werden soll. Das
knapp 3 m lange Quadrofoil war
von drei jungen slowenischen Designern innerhalb von nur sechs Monaten
entwickelt worden.

Q2A Electric
Auf dem Wasser ist das aus einer leichten Karbonfaser- und Kevlarkarosserie bestehende Quadrofoil, das dank der Hydrofoiling-Technologie auf dem Wasser fliegt, leise und erzeugt kaum Wellen. Es ist für den Einsatz auf Seen und Flüssen konzipiert und eignet sich aufgrund seines speziell angefertigten elektrischen Antriebssystems, des Außenbordmotors und dem patentierten Lenksystem ideal für Fahrten in Meeresschutzgebieten, wo die meisten Motorboote und Jetskis verboten sind.
Die erste Serie der limitierten Auflage von 100 Exemplaren soll im März 2015 ausgeliefert werden. Die Q2S Electric Limited Edition ist zur Vorbestellung erhältlich und kostet 22.500 €. Dieses Modell wiegt 335 kg und ist mit einem 5,5 kW Motor und einer 10 KWh Batterie ausgestattet, was eine Reichweite von 100 km und eine Geschwindigkeit von 21 Knoten ermöglicht. Anschließend soll zu einem Preis von 15.000 € der Q2A Electric geliefert werden, der ein Gewicht von 295 kg hat und mit einem 3,7 kW Motor und einer 4,5 KWh Batterie ausgestattet ist, was eine Reichweite von 50 km ermöglicht und eine Geschwindigkeit von 16 Knoten.
Es kann außerdem innerhalb einer Stunde (das Q2S in zwei) an einer Steckdose oder über die flexiblen Solarzellen aufgeladen werden, die mit jedem Quadrofoil mitgeliefert werden und im Inneren des Wasserfahrzeugs zusammengefaltet werden können, um als Notstromquelle zu dienen oder um die Batterie aufzuladen, wenn man vom Netz ist.

Electric Limited Edition
Eine der wichtigsten Errungenschaften der Maschine ist die Entwicklung eines Klappmechanismus für das Tragflächenprofil, der es ermöglicht, die 5 kg schweren, aus einer Aluminiumlegierung gefertigten Beine des Tragflächenprofils während der Benutzung zu verstellen und sie mit Hilfe einer manuellen oder elektrischen Winde nach oben zu klappen, bevor man in einen Schwimmbereich eintaucht oder sich dem Ufer nähert.
Nach dem Hochklappen der Tragflügelbeine hat das Quadrofoil einen Tiefgang von nur 15 cm. Zum Transport können die klappbaren Beine auch abgenommen werden.
Ebenfalls förderlich: Aufgrund der geringen Leistung des 3,7 kW Motors gehört das Quadrofoil zu einer Kategorie von Wasserfahrzeugen, für die in der EU keine Zulassung, kein PWC-Führerschein, keine Versicherung und keine Navigationserlaubnis erforderlich ist. Zudem ist der aus Verbundwerkstoffen gefertigte Rumpf des Bootes dank eines luftdichten Oberteils fast unsinkbar.
Das gleichnamige slowenische Unternehmen Quadrofoil befindet sich derzeit in der Kapitalbeschaffungsphase, um die Produktionspläne für mehr als 10.000 Einheiten pro Jahr ab 2013 zu finanzieren. Außerdem ist bereits die Entwicklung einer wesentlich schnelleren Maschine im Gange. Im November 2014 wird der Preis des Quadrofoil mit 22.500 € angegeben, die Auslieferung soll nun im März 2015 starten.
Meldungen im Dezember 2016 besagen allerdings, daß das Quadrofoil erst jetzt, nach vier Jahren Entwicklungszeit, endlich serienreif sei. Die Verzögerung soll darauf zurückzuführen sein, daß die Ingenieure der Firma den ursprünglichen Prototyp testen, überprüfen, verbessern und feinabstimmen mußten. Nun soll die Auslieferung der limitierten Q2S-Version im März 2017 beginnen - und der Q2A dann Anfang 2018 folgen.
Unter den ferngesteuerten
Unterwasserfahrzeugen fällt der OpenROV auf,
der im Juni 2012 in den Blogs kursiert - denn das
Design des NASA-Ingenieurs Eric Stackpole ist quelloffen
und soll die Welt der Unterwasserforschung auch für Menschen ,öffnen’,
die sonst keinen Zugang dazu hätten - daher auch der Name. Das Start-Up OpenROV (Open-Source
Remotely Operated Vehicle) aus San Francisco wurde im Vorjahr gegründet
und hat schnell eine weltweite Community von Ingenieuren, Wissenschaftlern
und Enthusiasten gewonnen, die die Technologie weiterentwickeln und
für verschiedenste Anwendungen nutzen.

Da man für den Bau eines solchen Geräts bislang technisch ziemlich versiert sein mußte, hat Stackpole einfach zu montierende Bausätze entwickelt, die die gesamte Elektronik und die lasergeschnittenen Acrylteile enthalten, so daß auch weniger technikaffine Personen ein OpenROV innerhalb eines Wochenendes selbst zusammenbauen können. Der Bausatz soll innerhalb weniger Monate zu einem Preis von 750 $ lieferbar sein.
In seiner jetzigen Form mißt das neutral schwimmende U-Boot nur 30 x 20 x 15 cm, wiegt 2,5 kg und wird mit acht C-Zellen-Batterien betrieben. In einer zentralen, versiegelten Acrylglasröhre befinden sich die Webkamera, die LED-Scheinwerfer und andere Elektronik, die trocken gehalten werden muß. Diese Röhre kann gedreht werden, um die Kamera/Lichter nach oben und unten zu schwenken, und ist für Wartungsarbeiten leicht abnehmbar.
Der Antrieb erfolgt über drei Elektromotoren, die zwei horizontale Bugstrahlruder antreiben, mit denen sich das Mini-U-Boot vorwärts und rückwärts bewegen und drehen kann, sowie ein vertikales Bugstrahlruder, mit dem die Tiefe verändert wird. Das Gerät kann maximal 100 m tief tauchen und wird über einen Webbrowser auf dem Laptop des Benutzers gesteuert, der über ein Kabel mit einem Linux-Computer auf dem ROV verbunden ist.
Im Juli 2012 startet OpenROV eine Crowdfunding-Kampagne auf Kickstarter - bei der statt dem ursprünglichen Finanzierungsziel von 20.00 $ beachtliche 111.622 $ zusammenkommen. Im September 2015 folgt eine zweite Kampagne für ein weiterentwickeltes Modell namens OpenROV Trident.

Der hydrodynamische Körper des Trident verfügt über zwei Heckstrahlruder, die für einen schnellen horizontalen Antrieb sorgen, sowie über ein drittes, in der Mitte angebrachtes Vertikalstrahlruder, das das ROV vertikal bewegt. Es hat eine Höchstgeschwindigkeit von 2 m/s und kann bis zu einer maximalen Tiefe von 100 m abtauchen, um Ziele mit Hilfe der an der Vorderseite montierten HD-Videokamera und sechs LED-Scheinwerfern zu inspizieren.
Da sich Radiowellen nicht gut durch Wasser bewegen können, sendet das Trident Echtzeit-Videos und empfängt Befehle über ein neutral schwimmendes Kabel, das zu einer mit Wi-Fi ausgestatteten Boje führt, die über ihm an der Wasseroberfläche mitgeschleppt wird. Das mitgelieferte Kabel ist 25 m lang - Käufer, die mit dem Trident tiefer tauchen möchten, können optional ein längeres Kabel verwenden. Mit einer Ladung des LiFePO4-Akkus kann das ROV bis zu drei Stunden lang betrieben werden.
Diesmal beträgt das Finanzierungsziel der Kickstarter-Kampagne 50.000 $, doch 1.324 Unterstützer beteiligen sich mit insgesamt 815.601 $, was auch diese Kampagne ausgesprochen erfolgreich macht. Möglicherweise auch deshalb, weil man den Trident hierbei zu einem Beitrag von 799 $ vorbestellen, während der für später geplante Verkaufspreis 1.199 $ beträgt. Die Auslieferung erfolgt allerdings erst im zweiten Halbjahr 2018.
OpenROV verschmilzt später mit der Firma Spoondrift Technologies und heißt nun Sofar Ocean Technologies.

(Grafik)
Die Albatross Yacht des Designers Tarun Sharma ist ein bislang nicht verwirklichtes Megayacht-Konzept, das als sein Diplomprojekt im Bereich Transport- und Automobildesign entstand und 2012 fertiggestellt wurde. In den Blogs erscheint das Designprojekt im Juli.
Die 200 m lange Luxusyacht hat sowohl Solarsegel als auch Turbinenantrieb, doch ihr Alleinstellungsmerkmal sind die zwei kleineren, jeweils 80 m langen ,Skimmer’ Boote mit Planar-Rümpfen, die sich als modulare Motor-Yachten von der größeren Megayacht ablösen und unabhängig losfahren können. Wieder miteinander verbunden bietet sich den Passagieren daher 200 + 80 + 80 m offener Raum.
Die Albatross bietet Platz für den Eigner und 24 Gäste, wobei neben dem Kapitän und dem Chefingenieur noch 52 Besatzungsmitglieder eingeplant sind. Nähere technischen Details zum Antrieb, zur Reichweite und Geschwindigkeit sind nicht auffindbar.
Ebenfalls im Juli wird über das Konzept einer großen Unterwasserdrohne berichtet, das von einer Gruppe französischer Industrie-Designer der French International School of Design als Antwort auf eine Anfrage des Entsorgers Veolia Environmental Services entwickelt wurde, sich etwas einfallen zu lassen, um gegen den Großen Pazifischen Müllteppich vorzugehen.

(Grafik)
Die Drohne 1-001-1 ist im Grunde genommen ein überdimensionales Poolnetz mit einem Sensor, das auf innovative Weise treibenden Plastikmüll einfängt, während es sich mit Hilfe eines Elektromotors und drei Schubdüsen geräuschlos durch das Wasser bewegt. Das Netz zum Auffangen von Plastik ist von einer runden Boje umgeben, die das Gewicht des eingesammelten Mülls ausgleicht.
Die Idee der Designer ist, daß mehrere dieser Drohnen das Meer autonom nach Abfällen absuchen, wobei sie ein spezielles Infraschallsystem verwenden, um Fische und andere Wassertiere fernzuhalten. Dank ihrer leistungsstarken Batterien können sie mehr als zwei Wochen im Wasser bleiben.
Es wurde noch nichts darüber gesagt, wie viel Plastik jede Meeresdrohne auffangen kann, welche Kosten damit verbunden sind und wie der eingesammelte Müll wieder ab- bzw. weitergegeben wird. Die Erklärung, „wenn die Batterien leer sind, kehrt der Roboter zu einer Heimatbasis zurück, wo Menschen das Plastik einsammeln und zu einer Recyclinganlage transportieren können“, klingt jedenfalls noch nicht sehr durchdacht.Das Konzept erscheint in der Folgezeit mehrfach in den Blogs, doch zu einer Umsetzung kommt es nicht.
Beim 7. europaweiten Wettbewerb Student Autonomous Underwater Challenge – Europe (SAUC-E), der seit 2006 ausgetragen wird und in diesem Jahr im Juli im norditalienischen La Spezia stattfindet, erreichen zwei Teams der Universität zu Lübeck wieder hervorragende Plazierungen unter den teilnehmenden 32 Teams. Die Lübecker nehmen seit vier Jahren unter der Leitung von Prof. Erik Maehle an dem Wettbewerb teil.
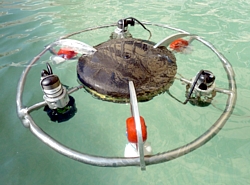
Der autonome Unterwasserroboter HANSE, der sich letztes Jahr den 1. Platz gesichert hatte, erreicht diesmal den 2. Platz unter insgesamt 15 Teams und muß sich nur dem kanadischen Konkurrenten aus Quebec geschlagen geben. Und das zweite Team gewinnt mit dem neu entwickelten Roboter SMART-E den Innovationspreis des Wettbewerbs. Bei diesem müssen die Unterwasserroboter unterschiedliche Aufgaben völlig autonom erfüllen: z.B. durch unter Wasser angebrachte Tore fahren, ein Rohr inspizieren, einer Wand im Hafenbecken folgen sowie eine Boje, einen kleinen Katamaran und eine Schallquelle aufspüren.
HANSE, bereits im vierten Jahr im Einsatz, besticht durch sein einfaches und robustes Design, während sich der neue Roboter SMART-E durch eine ausgesprochene Beweglichkeit und Agilität unter Wasser völlig von allen anderen Unterwasserrobotern unterscheidet. Er verfügt über einen omnidirektionalen Antrieb, der es ihm ermöglicht, unter Wasser aus dem Stillstand in jede Richtung mit beliebiger Orientierung zu fahren.
Es wäre sicherlich reizvoll, eine umfassende Recherche über die früheren und späteren Wettbewerbe durchzuführen, dies würde den mir zur Verfügung stehenden Zeitrahmen aber weit sprengen. Vielleicht hat ja eine Koautorin oder ein Koautor Lust darauf.
Im September 2012 wird in den Blogs ein jetbetriebenes Bodyboard namens Kymera vorgestellt, das vor seiner Markteinführung im Sommer des nächsten Jahres steht. Sein Erfinder, der Ton- und Videoingenieur Jason Woods, hatte bereits Anfang 2011 eine mit Benzin betriebene Version gezeigt, die mit weniger als einem Liter Kraftstoff über zwei Stunden lang betrieben werden kann und eine Höchstgeschwindigkeit von etwa 24 km/h erreicht.

Nachdem Woods und seine Firma Inventive Design Group Inc. ihr kompaktes und leichtes Jetboard als weltweit erstes auf Elektroantrieb umgestellt haben, verdienen sie es in diese Übersicht aufgenommen zu werden, denn der Wechsel trägt auch den Bedenken hinsichtlich Lärm und Umweltverschmutzung Rechnung.
Der aktuelle Elektromotor hat eine Spitzenleistung von 3,4 kW und wird von einem Lithium-Ionen-Akku gespeist, der eine Betriebsdauer von etwa einer Stunde ermöglicht. Der Akku kann in etwa zwei Stunden aufgeladen werden, und das gesamte Board wiegt einschließlich des Akkus nur 21 kg. Dies entspricht dem Ziel von Woods, ein persönliches Wasserfahrzeug zu schaffen, das in einem Auto transportiert werden kann, ohne einen Anhänger zu benötigen, und das unter dem Arm zum Wasser getragen werden kann.
Um das überlegene Drehmoment eines Elektromotors besser zu nutzen, modifiziert Woods auch das Antriebssystem des Kymera, das dem Jet-Pumpensystem der frühen Prototypen ähnelt, nur viel effizienter ist. Außerdem entwickelt er eine Solarladestation für das Board, das nun auch eine neue parabolische Form besitzt. Das solare Dachträger-Ladesystem besteht aus drei halbflexiblen Solarmodulen mit einer Gesamtleistung von 300 W. Allerdings hat Woods die fossilen Brennstoffe noch nicht ganz aufgegeben, denn ein propanbetriebenes Modell ist ebenfalls in Arbeit.
Das Kymera wird es in zwei verschiedenen Größen mit jeweils zwei verschiedenen Antriebsoptionen geben. Das 1,67 m große Modell wird wahlweise mit einem 5 PS Propanmotor oder einem 2 kW Elektromotor geliefert, während das 1,98 m große Board wahlweise mit einem 10 PS Propanmotor oder einem 3,5 kW Elektromotor ausgestattet ist. Die aktuellen Elektromodelle erreichen eine Höchstgeschwindigkeit von 29 km/h, während die mit Propan betriebenen Modelle eine Geschwindigkeit von 40 km/h erreichen können.
Ein drittes ,Rescue’-Modell für Such- und Rettungsteams ist eine modifizierte Version des Großbretts und verfügt über einen High-End-Elektroantrieb. Es kann auch per Seil gezogen oder ferngesteuert werden, um in Not geratene Schwimmer in Sicherheit zu bringen. Zu diesem Zweck ist es mit zusätzlichen Haltegriffen ausgestattet, und sein Deck kann als ausklappbarer Rettungsschlitten verwendet werden.
Das Basismodell soll zu einem Preis von rund 5.000 $ auf den Markt kommen, bei größerer Nachfrage und höheren Stückzahlen könnte der Preis schließlich auf etwa 2.000 $ sinken.

(2016)
Gemäß Berichten im Februar 2013 wird das Projekt auf Kickstarter gestellt, um es in die Serienproduktion zu bringen. Die Finanzierung des Projekts mit einem von Zielbetrag 250.000 $ gelingt aber nicht, da bis Anfang April nur 116.346 $ von 165 Unterstützern zusammen kommen.
Erst im Juni 2016 wird gemeldet, daß sich das Kymera Bodyboard inzwischen zu einer fast serienreifen Maschine mit den Maßen 205 x 81 x 30 cm entwickelt hat. Das Batteriefach läßt sich nun aufklappen, und Schienen führen den 11 kg schweren Akku ganz natürlich an seinen Platz. Bei Tests erweist sich das Board als einfach und kontrollierbar genug, daß selbst zaghafte Fahrer es als zugänglich empfinden. Das Deck hat teilweise eine Neopren-Polsterung, die Grip und ein wenig Erleichterung von der ansonsten harten Oberfläche bietet.
Bei langsamer Fahrt bildet das Kymera, das nun in den Farben Gelb, Grün, Orange, Rosa, Rot oder Weiß angeboten wird, eine gute Alternative zu Kajaks oder Kanus. Es ist leise und hat mit einer zwei Stunden Fahrzeit bietenden Akkuladung eine Reichweite von bis zu 10 km. Die Höchstgeschwindigkeit beträgt nun 32 km/h, fühlt sich aber schneller an, da das Gesicht nur rund 60 cm vom Wasser entfernt ist.
Das Board kann bereits vorbestellt werden und kostet als ,Ramp-up System’ 3.750 $, was das Board, einen Akku, ein Ladegerät, eine Boardtasche und einen Akkutransportkoffer umfaßt.

Im Mai 2019 wird jüngste Ergänzung der Produktlinie, zu der neben dem Bodyboard auch ein batteriebetriebenes Kajak und ein elektrisches Surfbrett gehören werden, das Kymera K-X2 angekündigt. Das 213 x 101 x 66 cm große Wasserfahrzeug wiegt 32 kg und kann in zwei Teile geteilt werden, um den Transport zu erleichtern. Mit einer vollelektrischen Leistung von 10 kW soll es auf bis zu 56 km/h beschleunigen können.
Der K-X2 wird zunächst für einen Preis von 5.995 $ erhältlich sein und die Auslieferung noch in diesem oder Anfang nächsten Jahres beginnen. Sobald er in Produktion ist, müssen Käufer 6.495 $ auf den Tisch legen. Tatsächlich läßt sich aber nicht belegen, daß dies bislang erfolgt ist. Dem Stand von 2025 zufolge werden die Boards für 3.400 - 3.800 € angeboten, nachdem sie zuvor bis zu 7.500 € gekostet hatten, von dem K-X2 ist aber nichts mehr zu finden, noch nicht einmal auf der Firmenhomepage.
Im Oktober 2012 berichten die Fachblogs über das 2 m lange und 200 kg schwere autonome Unterwasserfahrzeug SeaBED (o. Jaguar), das bei zwei getrennten Expeditionen, zuerst 2010 und dann erneut in diesem Jahr, zu bisher unzugänglichen Gebieten 20 - 30 m unter dem Eis schwimmt, um mittels multipler Sonarmessung ein 3D-Modell des Antarktis-Eisschildes anzufertigen. Es bewegt sich dabei in einem ,Rasenmäher-Gittermuster’ mit einer Geschwindigkeit von etwa 30 cm/s und kartiert dabei die komplexe Topografie der Unterseite des Eises in 400 x 400 m großen Abschnitten.

Die erstmals erstellten hochauflösenden 3D-Karten decken mehr als 500.000 m2 in den Weddell-, Bellingshausen- und Wilkes-Land-Sektoren der Antarktis ab und zeigen starke Verformungen in allen drei küstennahen Regionen, die zu einer mittleren Meereisdicke führen, die weit über den Ergebnissen der bisherigen Eisbohrungen und Schiffsmessungen liegt. Die Wissenschaftler um Guy Williams vom Antarctic Climate and Ecosystems Cooperative Research Centre werden nun Untersuchungen in größerem Maßstab durchführen.
Im Zuge der Berichterstattung ist auch zu erfahren, daß der erste Einsatz des SeaBED im Zuge der Arctic Gakkel Vents Expedition (AGAVE) bereits im September und Oktober 2007 von dem Forschungsschiff Meteor aus erfolgte, was in dem Abschlußbericht des damals verantwortlichen MARUM – Zentrum für Marine Umweltwissenschaften der Universität Bremen dokumentiert ist. Die aktuellen Ergebnisse werden im November 2014 in dem Bericht ,Thick and deformed Antarctic sea ice mapped with autonomous underwater vehicles’ veröffentlicht, der allerdings nicht offen einsehbar ist.
Während der Offshore Energy im
Oktober 2012 in
Amsterdam bringen die niederländischen Damen Shipyards (o.
Damen Shipyards Group) ihren ersten dieselelektrischen Hybrid-Schlepper auf
den Markt, der an den lokalen Erstkunden Iskes Towing & Salvage geht.
Drei weitere Hybridfahrzeuge werden von der Königlichen Niederländischen
Marine bestellt. Beim Umbau der zuvor nur brennstoffbetriebenen Version
wird der Schlepper um eine zusätzliche Kupplung erweitert, und zwischen
jedem Hauptmotor und dem Ruderpropeller wird ein wassergekühlter 230
kW Elektromotor eingebaut.

(Grafik)
Optional bietet Damen auch Batteriesätze an, mit denen alle Motoren während des Stillstands, Manövrierens und freien Segelns bei niedrigen Geschwindigkeiten von bis zu 5 Knoten abgeschaltet werden können. Das Schiff für den Betreiber Iskes Towing & Salvage wird mit zwei 120 kWh Lithium-Eisenphosphat-Akkus ausgestattet. Neben anderen energieeffizienten Produkten wie eine LED-Beleuchtung verfügt das Hybridschiff auch über Solarpaneele, die zum Aufladen der 24 V Batterien für das Anlassen der Motoren und für die Notstromversorgung der Navigationsbeleuchtung und der Funkgeräte verwendet werden.
Die Werft behauptet, daß dieses Schiff, dessen Bezeichnung ASD Tug 2810 Hybrid lautet und das eine Zugkraft von 60 Tonnen hat, bis zu 30 % Dieselkraftstoff einsparen und die Emissionen um bis zu 40 % reduzieren wird. Dies geschieht, weil das dieselelektrische Antriebssystem verhindert, daß die Hauptmotoren des Diesel-Direktantriebssystems häufig im Leerlauf oder mit geringer Last laufen.
Interessanterweise hatten Forscher der University of California, Riverside (UCR) bereits im November 2010 bei Tests in den Häfen von Los Angeles und Long Beach nachgewiesen, daß der damals einzige Hybrid-Elektroschlepper der Welt tatsächlich die Rußemissionen um etwa 73 %, die Stickstoffoxide um 51 % und die Kohlendioxidemissionen um 27 % reduziert hat.
Im Juni 2014 übernimmt Iskes Towage & Salvage den ersten Damen ASD 2810 Hybrid-Schlepper, der den Namen Bernadus erhält. Seine Indienststellung ist das Ergebnis des sogenannten Projekts E3, das Damen seit 2009 mit verschiedenen Partnern durchführt, darunter auch dem deutschem Motorenhersteller MTU, der das Hauptantriebs- und Generatorsystem für das Schiff liefert.
Durch die Überwachung des Betriebs herkömmlicher ASD 2810-Schlepper im Rotterdamer Hafen war im Rahmen des Projekts festgestellt worden, daß diese Schlepper die meiste Zeit ineffizient arbeiten, da sie bis zu 80 % des Tages entweder frei fahrend, stationär oder im Leerlauf sind, was die Betriebskosten erhöht und wenig umweltfreundlich ist.
Ein zweites Schwesterschiff ist derweil bereits im Bau - und um die Technologie weiterzuentwickeln, startet Damen zwei neue Forschungsprogramme. Mit Joules sollen der Energieverbrauch und die Effizienz von Verteilungs- und Speichersystemen weiter untersucht werden, während es bei LeanShip um die Verwendung von Flüssigerdgas als primäre Kraftstoffquelle geht.

Da es sich bei Damen eindeutig um einen Pionier handelt, soll hier auch die weitere Entwicklung zusammengefaßt werden. So entscheidet sich im August 2019 die Hafenbehörde Ports of Auckland in Neuseeland im Rahmen ihrer Klimaschutzinitiative von 2016 mit dem Ziel, bis 2040 vollständig emissionsfrei zu werden, für den Kauf des „weltweit ersten“ Elektroschleppers der Damen Shipyards Group. Die Auslieferung des RSD-E Tug 2513 (o. RSD Tug 2513 Electric) soll im Jahr 2021 erfolgen.
Der batterieelektrische Hafenschlepper hat eine Länge von 24,73 m, einen Tiefgang von 6 m, verfügt über zwei Azimut-Strahlruder mit Propellern von 3 m Durchmesser und kann pro Ladung seiner in Strängen angeordneten 80 Batteriespeicher mit einer Gesamtkapazität von 2.784 kWh drei bis vier Schiffe bewegen. Seine Zugkraft beträgt 70 Tonnen, die Ladezeit zwei Stunden, und als Backup gibt es zwei 1.000 kW Dieselgeneratoren.
Im Zuge der Vereinbarung ist zu erfahren, daß die Anschaffungskosten des Schleppers mit dem Namen Sparky etwa doppelt so hoch sind wie die eines entsprechenden Dieselschleppers, aber die Betriebs- und Wartungskosten sind deutlich geringer. Über die erwartete Lebensdauer des Schleppers von 25 Jahren hinweg wird eine Kostenersparnis von etwa 2,5 Mio. NZ$ erwartet - und keine Verschmutzung mehr durch Dieselkraftstoff. Neben dem RSD Tug 2513 ist Damen auch in der Lage, den ASD Tug 2813 zu elektrifizieren.
Der tatsächlich „weltweit erste vollelektrische Schlepper“ wird im September 2020 in der Türkei zu Wasser gelassen. Er ist von der Firma Navtek Naval Technologies entworfen (s.u.). Sparky in Neuseeland geht hingegen erst Mitte 2022 in den Einsatz.

Feuerlöschboote
Im November 2021 liefert Damen zwei Plug-in-Hybride an die Flotte Hamburg, eine Tochtergesellschaft der Hamburg Port Authority (HPA), bei denen es sich um die weltweit ersten elektrischen Feuerlöschboote handelt. Mit einer Batteriekapazität von 315 kWh sind die Boote in der Lage, längere Zeit vollelektrisch und emissionsfrei im und um den Hamburger Hafen zu fahren. Die Dresden wird die HPA, die Feuerwehr und andere Dritte unterstützen, während die Prag von der Hamburger Stadtfeuerwehr betrieben wird.
Die Feuerwehrboote sind kompakt und wendig, 35,5 m lang und erreichen eine Höchstgeschwindigkeit von 12 Knoten. Sie können neben der Brandbekämpfung auch Aufgaben wie Rettung und Bergung, technische Hilfeleistung und Umweltschutz übernehmen. Darüber hinaus haben sie einen Tiefgang von nur 1,5 m und können ihre Steuerhäuser absenken, um Brückeninspektionen und Wartungsarbeiten innerhalb der Stadt durchzuführen sowie Orte zu bedienen, die größere Schiffe nicht erreichen können.
Die Schiffe verfügen über ausfahrbare Arbeitsbühnen, eine Fernbedienungsmöglichkeit, Schaumpumpen- und Steuersysteme, ein Vorbefeuchtungssystem, ein Wassersprühsystem um die Schiffe herum und eine interne Brandbekämpfungsmöglichkeit mit einem Aerosol-Löschsystem. Zusätzlich besteht die Möglichkeit, Einsatzcontainer an Deck zu positionieren, in denen weitere Feuerwehrausrüstung und Tagesunterkünfte für bis zu 16 Feuerwehrleute untergebracht werden können. Verschiedene Wasserwerfer an Bord können pro Stunde bis zu 2.500 m3 Löschwasser bis zu 150 m weit und 70 m hoch abgeben. Das Investitionsvolumen liegt bei rund 20 Mio. €.

Waterhoen
Im Januar 2022 übergibt Damen drei neue Patrouillenboote nach Amsterdam: Die elektrisch angetriebenen Waterpieper und Waterhoen sind mit einem 273 kWh Batteriepaket von EST-Floattech ausgestattet und werden unter dem Namen der Stadt Amsterdam fahren, während das Hybridboot P55, das einem 136,5 kWh Akku besitzt, von der Amsterdamer Polizei eingesetzt wird.
Das Design 1304 Damen ist 13,5 m lang und erreicht mit seinen 130 kW Elektromotoren eine Geschwindigkeit von 8,6 Knoten. Bei durchschnittlich schneller Fahrt kann das Boot mit einer einzigen Ladung seiner 273 kWh Batterien einen ganzen Tag lang betrieben werden. Die P55 verfügt außerdem über einen Dieselgenerator, um die Reichweite bei Bedarf zu verlängern. Im Jahr 2023 wird Damen zwei weitere Patrouillenboote der vollelektrischen Serie 1304 ausliefern, die mit jeweils 273 kWh ausgestattet sein werden.
Der niederländische Schiffbauer stellt im November 2023 eine vollelektrische Version 7017 E seines 70 m langen und 17 m breiten Hybrid-Versorgungsschiffs an, das als Service Operation Vessel (SOV) für den Wartungseinsatz in Offshore-Windparks konzipiert ist. Damen bietet bereits vier SOVs mit Längen von 60 - 88 m an, die alle mit einem hybriden Diesel-/Batterie-Antriebssystem ausgestattet sind.

von MJR
(Grafik)
Das neue Elektroschiff, das 60 Crewmitglieder und 40 Kabinen für die mitfahrenden Techniker hat, ist mit einem 15 MWh Lithium-Eisenphosphat-Batteriesystem für geschätzte 98 % des ganztägigen elektrischen Betriebs oder mit einer 10 MWh Batteriebank für 75 % elektrischen Betrieb erhältlich. Das Antriebssystem besteht aus vier 900 kW Azimut-Strahlrudern in doppelendiger Anordnung. Die Höchstgeschwindigkeit beträgt 12 Knoten. Außerdem verfügt das Schiff über zwei HVO/Diesel-Generatoren, die jedoch nur für Notfälle oder als Reserveaggregate eingesetzt werden.
Aufgrund des Einsatzgebiets lag die Idee nahe, die Batterien direkt über eine Windkraftanlage aufzuladen. Damen entwickelt daher gemeinsam mit dem britischen Unternehmen MJR Power & Automation eine Offshore-Ladelösung, bei der die bewegungskompensierte Gangway des Schiffes genutzt wird, um die Lücke zwischen dem Schiff und einer Windturbine oder einem Offshore-Umspannwerk zu überbrücken und die Batteriebank ohne manuelles Eingreifen über einen 4 MW/11 kV- Anschluß aufzuladen, während sich die 7017 E im Energiesparmodus befindet. Zudem befindet sich eine 8 MW-Variante in Entwicklung, die es auch größeren Schiffen der Damen-Flotte ermöglichen soll, vollständig elektrisch zu fahren.

der Parkwind
Wie im Juli 2024 berichtet wird, hat das belgisches Unternehmen Parkwind N.V. zwischenzeitlich mit dem MJR-System im Windpark Nobelwind die weltweit erste Offshore-Ladestation für Boote auf See realisiert, die lokal erzeugten, erneuerbaren Strom nutzt. Die fortschrittliche Technologie des automatischen An- und Abkopplungsprozesses und das Lademanagement ermöglichen es Schiffen, sich mit dem Ladekabel zu verbinden und während des Ladevorgangs an Ort und Stelle zu bleiben, ungeachtet der Meeresströmungen.
Nobelwind liegt 47 km von der Küste entfernt in der belgischen Nordsee und ist Parkwinds drittes Offshore-Windenergieprojekt mit 50 Turbinen, die auf einer Fläche von 19,8 km2 installiert sind und rund 190.000 Haushalte versorgen. MJR wird nun die aus den Versuchen gewonnenen Erkenntnisse in die erste kommerzielle Offshore-Ladesystemlieferung einfließen lassen, die für das erste Quartal 2025 geplant ist.
Bereits im Januar 2024 erhält Damen den Auftrag zur Lieferung von vier vollelektrischen Pkw-Fähren für das Unternehmen BC Ferries in British Columbia, die bis 2027 den Betrieb im Kurzstreckenverkehr in den Küstengewässern der kanadischen Provinz aufnehmen sollen - jeweils zwei Schiffe auf den Strecken zwischen Nanaimo Harbour und Gabriola Island bzw. zwischen Campbell River und Quadra Island.
Mit diesem Auftrag erhöht sich die Gesamtzahl der Fähren, die Damen in den letzten Jahren an BC Ferries geliefert hat, auf zehn. Diese neuen Fähren werden jedoch die ersten sein, die zu 100 % mit elektrischer Energie betrieben werden.

von Damen
Die Schiffe basieren auf dem doppelendigen RoRo-Modell 8117 E3 der Island-Klasse von Damen. Jedes Schiff kann bis zu 47 Fahrzeuge und 390 Passagiere befördern. Batteriepakete mit einer Kapazität von 2.000 kW liefern den Strom für die Antriebe. Das schnelle Aufladen mit erneuerbarem Strom erfolgt, während die Fähren ihre Passagiere und Fahrzeuge an jedem Ende aus- und einsteigen lassen. Jedes Schiff wird außerdem über Hilfsdieselmotoren verfügen, die als Reserve und zur allgemeinen Redundanz eingesetzt werden.
Anderen Quellen zufolge baut Damen für BC Ferries eine Road Ferry 6819 E3 und eine Road Ferry 9819 E3 sowie sechs Hybrid-Road Ferries 8117 E3. Die Hybridschiffe werden bereits jetzt für eine spätere Umrüstung auf vollelektrischen Antrieb vorbereitet.
Die landseitige Ladeausrüstung wird ebenfalls von Damen geliefert. Das Unternehmen bietet diese Dienstleistung bereits zum vierten Mal an. Das erste Mal wurde sie 2021 in Kanada für zwei Hybridfähren für das Verkehrsministerium von Ontario erbracht. Es folgten Projekte im dänischen Kopenhagen und im niederländischen Dordrecht. Darüber hinaus hat Damen bereits sieben vollelektrische Fähren 2306 E3 an die Stadt Kopenhagen und einen vollelektrischen Cutter Suction Dredger 650 für einen australischen Kunden geliefert.
Außerdem baut Damen neun 28,6 m lange Wasserbusse für Blue Amigo, die in den Niederlanden eingesetzt werden sollen. Drei der 2907 E3 Schiffe für jeweils 150 Passagiere werden vollelektrisch sein, während die übrigen Hybrid-Wasserbusse sind, die aber ebenfalls schon für eine spätere Umrüstung auf vollelektrischen Betrieb vorbereitet werden.
Auf der ADIPEC 2024, der weltgrößten Energiekonferenz und -messe im November 2024 in Abu Dhabi, erzielt der erst im Juli ausgelieferte neue RSD-E-Schlepper 2513 Bu Tinah von Damen durch eine Zugkraft von 78,2 Tonnen einen Guinness-Weltrekord in Sachen Leistung. Er hat eine Energiespeicherkapazität von 2.800 kWh und ist der erste vollelektrische Schlepper, der im Nahen Osten eingesetzt wird.
Über ganz besondere Solarboote wird im November 2012 in den Blogs vorgestellt: Es sind schwimmende Schulen in Bangladesch. Dort kommt es aufgrund der reichhaltigen Flußsysteme des Landes während der Monsunzeit durch die starken Regenfälle vermehrt zu Überschwemmungen, was Hunderte von Schulen zur häufigen Schließung zwingt.

Bootsschule
Die bereits 1998 gegründete gemeinnützige Organisation Shidhulai Swanirvar Sangstha (SSS) setzt sich dafür ein, daß die Kinder das ganze Jahr über unterrichtet werden - und baut daher solarbetriebene Bootsschulen aus natürlichen Materialien, die vor Ort beschafft werden. Während der Regenzeit holen die Boote die Schüler aus den Dörfern am Flußufer ab und legen in der Regel an einem sicheren Ort an, wo der Unterricht stattfindet.
Die Boote sind mit Solarpaneelen von 500 W - 2 kW Leistung auf dem Dach, mit wiederaufladbaren Bleibatterien sowie mit kleinen Bibliotheken mit Computern und Internetzugang ausgestattet. Alle Boote verfügen über eine PV-gespeiste Beleuchtung mit 10 W-Kompaktleuchtstofflampen sowie über Mobiltelefondienste.
Nähere technischen Details gibt es nicht, auch nicht über die Antriebsform der Boote. Jedes Boot kann nach Angaben der Organisation etwa 30 Schüler aufnehmen. Abends werden auf den Booten Bildungsprogramme auf Segeltüchern gezeigt, und die Schüler können zusammen mit ihren Eltern hilfreiche Kurse in Landwirtschaft, Finanzen, Gesundheit und Hygiene besuchen. Im Jahr 2007 betrieb Shidhulai bereits 88 Boote, außerdem wurden bis dahin 2.500 Solarlaternen verteilt, damit die Schülerinnen und Schüler zu Hause ihre Aufgaben machen können.
Vom Ashden Trust (später: Aurora Trust), einer gemeinnützigen Organisation, die sich auf den Klimawandel, die nachhaltige Entwicklung und die Verbesserung der Lebensqualität in ärmeren Gemeinden konzentriert, wird Shidhulai mit dem Ashden Award 2007 ausgezeichnet. Einen weiteren Preis gibt es von der Bill and Melinda Gates Foundation, und vom United Nations Development Program (UNDP) folgt der Equator Prize.
Ein leicht dekadentes Gegenbeispiel, das im Dezember 2012 in der Presse kursiert, trägt den Namen HotTug und stammt von dem niederländischen Designer Frank de Bruijn. Es ist der weltweit erste holzbefeuerte Whirlpool, in dem man elektrisch angetrieben herumschippern kann und der erstmals auf der Bootsmesse HISWA im September in Amsterdam ausgestellt wird. Mieten kann man die Geräte später in Rotterdam, Brien und Iseltwald mieten - aber auch in London, in Seattle und auf Vancouver Island.

Jeder HotTug kann mit bis zu 2.000 Litern Wasser befüllt werden, während die Heizung das Wasser mit einer Geschwindigkeit von etwa 8° pro Stunde erwärmt - auf rund 38°C. Dann kann man gemeinsam warme Bäder im Freien genießen, während das umgebende Wasser ruhig kalt sein kann. Ist die Wanne nicht mit Wasser gefüllt, kann sie als stabiles Boot für bis zu sechs Personen genutzt werden. Zum Entleeren des HotTug wird eine Tauchpumpe verwendet, die das Boot in etwa 20 Minuten leer macht.
Derzeit sind zwei Versionen des 4 m langen Boots erhältlich, das aus Holz mit Glasfaserverstärkung gefertigt ist: eine mit integriertem Elektromotor und Batterien, die je nach Modell genug Energie für 2 - 8 Stunden Fahrt liefern, und eine mit Außenbordmotor, bei dem Benzin oder Strom verwendet werden können. Der Ofen ist aus rostfreiem Stahl und mit einem doppellagigen, klappbaren Kamin ausgestattet, so daß der HotTug unter Brücken von nur 50 cm Höhe hindurchfahren kann.
Weiter mit den Elektro- und Solarschiffen... (In Arbeit)
Nach den Elektroschiffen wenden wir uns nun der dritten Dimension zu und schauen uns an, wie die Entwicklung auf dem Sektor der Elektro- und Solarflugzeuge verlaufen ist.
Weiter mit den Elektro- und Solarfluggeräten...