Buch der Synergie
| Blättern |
 TEIL C
TEIL C
MICRO ENERGY HARVESTING
Felder und Wellen
Magnetfeld (I)
In der folgenden Übersicht geht es um das MEH aus natürlichen und künstlichen Magnetfeldern - aber auch um die Nutzung dieser zum Betrieb von Nano- und Mikro-Robotern, bis hin zu Geräten, die außerhalb der Erde zum Einsatz kommen sollen.
Bereits im Jahre 1932 soll der Physiker und Nobelpreisträger Prof. Werner Heisenberg vorausgesagt haben: „Ich denke, es wird bald möglich sein den Magnetismus als Energiequelle zu nutzen“. Unter dem Begriff ,Heisenberg-Modell’ wird ein theoretischer Ansatz für das Auftreten von magnetischer Ordnung in Festkörpern verstanden, wie die ferromagnetische oder die antiferromagnetische Ordnung.
Ein weiteres ihm zugeschriebenes Zitat lautet: „Die magnetische Energie ist die elementare Energie, von der das gesamte Leben des Organismus abhängt“, womit er sich wohl auf das Magnetfeld des Planeten als wichtige Voraussetzung für alles Leben auf der Erde bezog. Bislang habe ich aber noch nicht die genauen Quellen dieser Aussagen gefunden. Gesichert ist hingegen, daß die Kraft von Magnetsteinen und Magnetstäben bereits im Altertum bei den Ägyptern, Chinesen, Griechen und auch Römern zu Heilzwecken genutzt wurde. Mit Entdeckung der Elektrizität kam in neuerer Zeit die Magnetfeldtherapie hinzu.
Im globalen Kontext sollte auch auf den geomagnetisch induzierten Strom hingewiesen werden, der in räumlich ausgedehnten, elektrisch gut leitfähigen und in sich geschlossenen Strukturen auftritt und dort zu Problemen führen kann, wie den Leitungen von elektrischen Verbundnetzen oder Pipelines. Dieser Strom ist unmittelbare Folge eines magnetischen Sturmes, einer durch Sonneneruptionen ausgelöste Störung der Magnetosphäre der Erde. Ansätze, ihn zu nutzen, scheint es aber nicht zu geben.
(Grafik)
Ein früher Versuch zur motorischen Umsetzung des allgemeinen Magnetfelds geht auf Prof. Dipl.-Ing. Wilhelm Seibel zurück, der im Januar 1992 einen Wandler zur Gewinnung von Rotations- oder Elektroenergie aus Magnetfeldern zum Patent anmeldet - im Rahmen der Forschungsgesellschaft Magnetfeld Energie (FME), über die sich bislang leider nichts weiter in Erfahrung bringen ließ (EP-Nr. 0551533).
Später wird der Antrag zurückgezogen, vermutlich weil der ,Magnetfeldenergie-Umwandler zur wahlweisen Verwendung als Motor und Generator’ als „angebliches dynamo-elektrisches Perpetum Mobile“ betrachtet wird, obwohl Seibel die Funktionsfähigkeit der Erfindung anhand eines Labormodells mit spiralförmiger Magnetanordnung nachgewiesen habe. Ich würde mich über weitere sachdienliche Hinweise sehr freuen.
Was die magnetische Wirkung von Licht anbelangt, die
von Forschern der University of Michigan im Jahr 2011 entdeckt
wurde, so wurde diese bereits in dem entsprechenden Kapitelteil behandelt
(s.d.).
(2009)
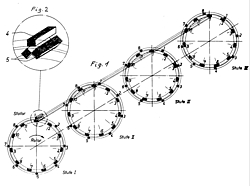
Die erste mir vorliegende Meldung über den Einsatz von Magnetfeldern und Magneten zum Antrieb von Mikro- und Nanoschwimmern stammt vom Mai 2009, als Peer Fischer und Ambarish Ghosh - damals an der Harvard University - den leider nicht öffentlich einsehbaren Bericht ,Controlled Propulsion of Artificial Magnetic Nanostructured Propellers’ veröffentlichen, in welchem sie über die Konstruktion und den Betrieb von chiralen kolloidalen Propellern berichten, die mit Hilfe homogener Magnetfelder mit mikrometergenauer Präzision im Wasser navigiert werden können.
Die Propeller werden über nanostrukturierte Oberflächen hergestellt und können in großer Zahl produziert werden. Bei biomedizinischen Anwendungen wie die gezielte Verabreichung von Medikamenten und die Mikrochirurgie können die Nanopropeller drahtlos und gut kontrolliert in flüssigen Umgebungen Chemikalien transportieren, Lasten schieben und als lokale Sonden bei rheologischen Messungen dienen. Im Gegensatz zu vielen anderen Entwicklungen wird die Arbeit an den magnetischen Nanopropellern auch in den Folgejahren fortgesetzt.
des MPI
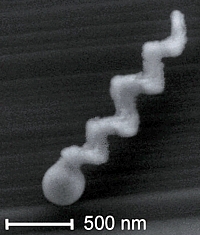
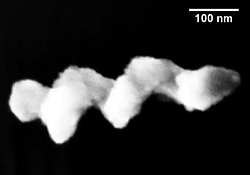
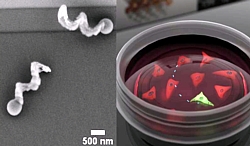
Ein großes Team um Fischer - inzwischen am Max-Planck-Institut für Intelligente Systeme (MPI-IS) in Stuttgart - publiziert im Juni 2014 eine Studie mit dem Titel ,Nanopropellers and Their Actuation in Complex Viscoelastic Media’, in der gezeigt wird, wie spiralförmige Nanopropeller kontrolliert durch ein biologisches Gel gesteuert werden können. Mit dabei sind diesmal Kollegen der Universität Stuttgart und des Technion in Israel.
Die Schraubenpropeller haben einen Filamentdurchmesser von 70 - 100 nm und sind 400 nm lang - und damit kleiner als alle bisher bekannten Nanopropeller und schwimmenden Mikroorganismen. Die Herstellung solcher Strukturen war bis vor kurzem auf Größenordnungen im Bereich von zehn und mehr Mikrometern begrenzt. Obwohl die neuen Nano-Schrauben so klein sind, daß Brownsche Kräfte ihren Antrieb in reinem Wasser unterdrücken, können sie sich durch Lösungen mit hoher Viskosität mit vergleichbaren Geschwindigkeiten wie größere Mikropropeller bewegen.
Um den Roboter anzutreiben, wird er stellenweise mit magnetischem Nickel versehen. Wird dann ein Magnetfeld angelegt, das um eine bestimmte Achse rotiert, versetzt es auch die nickelhaltige Nanoschraube in Rotation - und damit genau in die Bewegung, mit der sich der Propeller in einer Flüssigkeit voranbewegen kann. Die korkenzieherähnlichen Nanopropeller sind damit nicht nur vielversprechend für Anwendungen in der extrazellulären Umgebung, sondern auch klein genug, um von den Zellen aufgenommen zu werden.

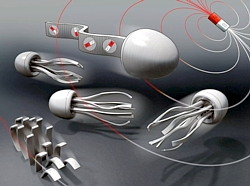
Im November 2014 folgt ein weiterer Bericht des MPI-IS, wo das Team um Fischer, inzwischen Professor, eine Art künstliche Muschel konstruiert hat, die nur wenige Hundert Mikrometer groß ist und sich in Testflüssigkeiten durch einfaches Öffnen und Schließen der ,Muschelschalen’ fortbewegt. An der Gruppe sind nun auch Kollegen der TU Dortmund beteiligt.
Da die Muschel nur wenige Male größer ist, als ein menschliches Haar dick, ist eine Flüssigkeit wie Wasser für sie etwa so zäh wie Honig oder gar Teer für uns. Bei so hoher Reibung in Flüssigkeiten gilt eigentlich, daß symmetrische Bewegungen, wie eben das gleichförmige Öffnen und Schließen einer Muschelschale, unter dem Strich kein Fortkommen bewirken, da sich das Vor und Zurück durch die jeweils gegensätzlichen Bewegungen schlicht aufhebt.
Anders ist der Fall bei Modellflüssigkeiten biologischer Medien, die im Gegensatz zu Wasser Besonderheiten aufweisen. Die meisten Körperflüssigkeiten haben die Eigenschaft, daß sich ihre Viskosität je nach Bewegungsgeschwindigkeit ändert. In Gelenkflüssigkeit zum Beispiel ordnen sich Hyaluronsäure-Moleküle im Ruhezustand zu netzwerkartigen Strukturen an, die für eine hohe Viskosität sorgen. Sobald sich aber etwas durch diese Flüssigkeit bewegt, bricht das Netzwerk auf und das Fluid wird dünnflüssiger.
Die Wissenschaftler machen sich genau dieses Verhalten zunutze, indem sie die Muschelschalen so steuern, daß sie sich sehr viel schneller öffnen als schließen. Dieses zeitlich asymmetrische Bewegungsmuster führt dazu, daß die Flüssigkeit während des Öffnens dünnflüssiger ist als beim anschließenden Schließen, womit die Distanz, die die Muschel beim Öffnen zurücklegt, auch eine andere ist als die, um die sie sich beim Schließen wieder zurückbewegt - so daß sie also insgesamt gesehen vorankommt.
Die eigentliche Muschel besteht aus einem relativ harten Kunststoff, wobei die besondere Herausforderung darin liegt, die Muschelschalen einerseits extrem dünn und andererseits robust genug für die ,Ruderbewegungen’ in einem vergleichsweise zähen Medium zu gestalten. Um den Mikroschwimmer zu kontrollieren, sind in der Achse, die das Gelenk zwischen beiden Muschelschalen bildet, magnetische Seltenerdmetalle eingearbeitet. Über ein von außen angelegtes Magnetfeld läßt sich dann regulieren, wie sich die Muschelschalen öffnen und schließen und die Muschel sich fortbewegt. Der Artikel ,Swimming by reciprocal motion at low Reynolds number’ ist im Netz einsehbar.
Ebenfalls einsehbar ist der im Dezember 2015 veröffentlichte Bericht ,Enzymatically active biomimetic micropropellers for the penetration of mucin gels’, in dem aufgezeigt wird, wie ein mit dem Enzym Urease beschichteter Mikropropeller lokal die Magenschleimhaut verflüssigt, um sie zu durchdringen.
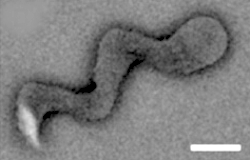
Das aktuelle Mikrovehikel des MPI-IS-Teams um Metin Sitti und Kollegen der TU München besteht aus einem Kopf und einem korkenzieherförmigen, etwa 2 μm langen Anhang. Sein Hauptbestandteil ist Siliziumdioxid, zudem ist es mit einer dünnen Nickelschicht versehen, die es ermöglicht, den Roboter mittels eines äußeren Magnetfelds in Rotation zu versetzen. Dadurch bewegt sich das Vehikel in Flüssigkeiten wie von einer Schiffsschraube angetrieben vorwärts.
Da die Antriebskraft aber nicht ausreicht, den Mikropropeller auch durch eine zähe Schleimhaut im menschlichen Körper wie diejenige des Magens zu befördern, nehmen sich die Forscher das Magenbakterium Helicobacter pylori zum Vorbild, das in der Lage ist, die Magenschleimhaut zu durchschwimmen und bis an die Magenwand zu gelangen. Hierzu setzt die Mikrobe das Enzym Urease frei, welches den in der Magenflüssigkeit vorhandenen Harnstoff zerlegt.
Dabei wird unter anderem das basische Ammoniak freigesetzt, das den pH-Wert im ansonsten sauren Milieu des Magens lokal in die Höhe treibt - woraufhin das gelartige Netzwerk, aus dem die Magenschleimhaut aufgebaut ist, an dieser Stelle zusammenbricht. Auf dies Art verflüssigt das Bakterium die Schleimhaut in seiner direkten Umgebung und schwimmt durch sie hindurch.
Die Forscher statten ihren Mikropropeller mit derselben schleimlösenden Fähigkeit aus, indem sie ihn mit Urease beschichten. Und nachdem zunächst Schleimhautbestandteile, die auf dem Propeller haften blieben, dessen Rotation behindert hatten, sorgt ein Zusatz von kleinsten Mengen Gallensäure für einen reibungslosen Vortrieb. Bei Experimenten an Schweinen wird das Vehikel mit Hilfe eines Magnetfeldes erfolgreich durch die Magenschleimhaut manövriert.
(Grafik)
Im September 2016 folgt die einsehbare Studie ,Shape-programmable magnetic soft matter’, an der auch Wissenschaftler der der Arizona State University, der Carnegie Mellon University in Pennsylvania sowie der Nanyang Technological University (NTU) in Singapur beteiligt sind. Diesmal geht es um weiche Materialien, die sich mit Magnetfeldern verformen lassen, um als Motoren für winzige Schwimmkörper zu dienen.
Zur Umsetzung entwickeln die Forscher hauchdünne, nur wenige Millimeter lange magnetisierbare Streifen aus Silikongummi, die im Magnetfeld die Schwimmbewegungen natürlicher Geißeln, Zilien oder Tentakeln imitieren, indem die beiden Enden der Streifen zu einem Bogen zusammenführt und dann wieder flachdrückt werden. Dazu werden dem elastischen Gummi Partikel einer magnetisierbaren Neodym-Eisen-Bor-Verbindung beigemischt.
Über ein von außen angelegtes Magnetfeld lassen sich die Gummistreifen zum wellenförmigen hin und her Schlagen bringen, sie können die komplexen Ruderbewegungen von Zilien auf der Oberfläche von Pantoffeltierchen imitieren, und mit zwei Silikontentakeln wird sogar eine Art künstliche Qualle gebaut, die ruderartige Schwimmbewegungen ausführt. Ein eigens entwickeltes Computerprogramm berechnet für jede Bewegungsform die jeweils optimalen magnetischen Rahmenbedingungen im voraus.
Auf Grundlage dieser Technologie zeigt das Team im Januar 2018 einen 4 mm langen Milliroboter, der gehen, kriechen, springen, klettern, rollen, schwimmen und Lasten tragen kann (,Small-scale soft-bodied robot with multimodal locomotion’). Auch er bewegt sich dank einer Reihe von magnetischen Mikropartikeln, die in seinen gummiartigen Körper eingebettet sind. Durch die Erzeugung und Manipulation eines externen Magnetfelds läßt sich das Gerät antreiben, indem die Siliziumstreifen auf unterschiedliche Weise verformt werden.
Nanopropeller
Im Mai 2020 erscheint dann der im Netz einsehbare Bericht ,Biocompatible Magnetic Micro- and Nanodevices: Fabrication of FePt Nanopropellers and Cell Transfection’, im welchem das Team des MPI-IS in Zusammenarbeit mit Wissenschaftlern des Max-Planck-Instituts für medizinische Forschung (MHMF) in Heidelberg und des Francis Crick Institute in London spiralförmige magnetische Nanopropeller aus einer Eisen-Platin-Legierung vorstellt, die genetisches Material zu einzelnen Zellen liefern können.
Die Wissenschaftler verwenden ein magnetisches Material, das die stärksten bekannten Neodym-Eisen-Bor (NdFeB) Supermagnete übertrifft, dabei aber chemisch stabil, ungiftig und biologisch kompatibel ist, also keinerlei negative Effekte in Zellen auslöst. Andere magnetische Materialien haben hingegen eine hohe Toxizität wie Nickel und Kobalt, sind nur schwer herzustellen wie Zinkferrit, korrodieren wie Eisen oder besitzen nur sehr schwache magnetische Momente wie Eisenoxide. und NdFeB-Magnete können in dieser kleinen Größe bislang nicht hergestellt werden.
Die neuen, 2 µm langen und 500 nm breiten Nanopropeller basieren auf der L10 Eisen-Platin (FePt) Legierung, die zuvor durch die Abteilung für Moderne Magnetische Systeme am MPI-IS unter der Leitung von Gisela Schütz entwickelt worden war. Es gelang, FePt-Nanomagnete herzustellen, die etwa 50 % stärker sind als die besten Neodym-Verbindungen der Welt.
Zur Produktion der Nanopropeller wird ein spezialisierter Hochvakuum-Nanofabrikationsprozeß namens Glancing Angle Deposition (GLAD) eingesetzt, gefolgt von einem Glühvorgang von einer Stunde bei 680°C. Damit lassen sich in wenigen Stunden Milliarden Nanostrukturen herstellen. Die Wissenschaftler gehen davon aus, daß die Eisen-Platin-Legierung in Zukunft auch bei der Herstellung anderer Mikro- und Nanoobjekte Verwendung finden wird.
Aufgrund ihrer magnetischen Eigenschaften stellen die Propeller außerdem die schnellsten dar, die je entwickelt wurden: sie können in einer Sekunde eine Strecke ihrer 13-fachen Länge zurücklegen. Bei den Versuchen gelingt es, die biokompatiblen Propeller präzise durch das die Zellen umgebende Zellmedium zu steuern. Die Propeller - beladen mit DNA für ein grün fluoreszierendes Protein - transportieren diese DNA dann ins Innere von Lungenkarzinomzellen, die daraufhin grün zu leuchten beginnen.
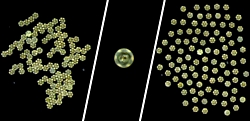
Im April 2022 folgt eine weitere Studie des MPI-IS-Teams um Sitti, an dem nun auch Biologen der Cornell University in New York und der Shanghai Jiao Tong University beteiligt sind, die sich mit Mikrorobotern befaßt, die als Schwarm gesteuert werden und jede gewünschte Formation einnehmen können - auch innerhalb des menschlichen Körpers. Die Roboter können etwa eine gerade Linie bilden oder sich wie Gas ausbreiten.
Der einzelne Roboter ist etwas größer als der Durchmesser eines menschlichen Haars, wird aus einem Polymer in 3D gedruckt und mit einer dünnen Kobaltschicht überzogen - was ihn von den Modellen des Fischer-Teams unterscheidet. Gleich ist, daß die Mikroroboter Dank des Metalls magnetisch geladen. Drahtspulen, die ein Magnetfeld erzeugen, umgeben den Versuchsaufbau. Das Magnetfeld ermöglicht es, die Teilchen in einem ein Zentimeter breiten Wasserbecken präzise zu steuern. Die einsehbare Studie trägt den Titel ,Microrobot collectives with reconfigurable morphologies, behaviors, and functions’.
Weichkörperroboters
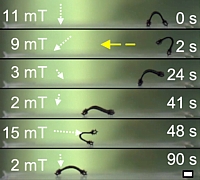
Nur einen Monat später legt die Gruppe um Sitti mit dem einsehbaren Bericht ,Wireless soft millirobots for climbing three-dimensional surfaces in confined spaces’ nach, in welchem ein nur 3,7 mm langer, 1,5 mm breiter und 150 μm dünner drahtloser Weichkörperroboter beschrieben wird, der auf 3D-Oberflächen zu klettern vermag, indem er sowohl die Weichkörperverformung als auch die Ganzkörperbewegung unter externen Magnetfeldern nutzt.
Bei Tests in einer Lunge und im Verdauungstraktes eines Schweins gelingt es, den elastischen, plattenförmigen und ferromagnetischen Roboter präzise an die gewünschte Position zu bewegen und dort auch verharren zu lassen. Er kann mittels Mikro-Spikes und durch die Verwendung des Bioadhäsionsstoffes Chitosan an nassen und trockenen Oberflächen haften. Zudem kann er sich auf engem Raum in alle Richtungen auch kopfüber bewegen sowie Objekte bis zum Dreifachen seiner eigenen Größe und bis zum 20-fachen des eigenen Gewichtes transportieren. Auch in diesem Fall wird eine medizinische Anwendung im menschlichen Körper anvisiert.
Die nächste einsehbare Veröffentlichung stammt vom März 2025 und trägt den Titel ,Navigating microalgal biohybrids through confinements with magnetic guidance’. Diesmal geht es um Mikroalgen, die mit magnetischen Nanopartikeln beschichtet zu winzigen Biohybrid-Robotern werden.
Um die Nanopartikel sicher auf der Oberfläche der Algen zu befestigen, wird Chitosan genutzt, ein Prozeß, der nur wenige Minuten dauert und bei neun von zehn Mikroalgen erfolgreich ist. Deren Schwimmfähigkeit wird durch die Magnetisierung kaum beeinträchtigt, und sie lassen sie sich über ein externes Magnetfeld gezielt in zähen Flüssigkeiten in jede gewünschte Richtung lenken und sogar durch dreidimensionale, enge Kanälen navigieren, die nur minimal breiter als die Mikroalgen selbst sind.
Doch nun weiter mit der allgemeinen Übersicht:
Berichten vom Mai 2015 zufolge erhält ein Team der Cornell University um Prof. R. S. Mason Peck eine Förderung der NASA in Höhe von 100.000 $, um im Rahmen einer neunmonatigen Untersuchung einen Amphibienroboter zu entwickeln, der durch die Meere ferner Monde und Planeten schwimmen kann. Der Zuschuß ist einer von 15 aus dem NASA Innovative Advanced Concepts (NIAC) Programm, bei dem Science-Fiction-Ideen durch die Entwicklung zukunftsweisender Technologien in wissenschaftliche Fakten verwandelt werden sollen.

(Grafik)
Die größte Hürde für Rover und Roboter, die zu weit entfernten Planeten geschickt werden, ist, daß sich diese nicht vollständig mit Solarstrom versorgen lassen, weil ihre Einsatzorte weit weg von der Sonne sind. Dies ist ebenso der Fall, wenn es sich um Tauchroboter handelt, die in Bereichen agieren sollen, in denen es überhaupt kein Licht mehr gibt.
Der vor allem für den Jupitermond Europa geplante Schwimmroboter, der einem Tintenfisch oder einem Aal nachempfunden ist, soll stattdessen seine Energie aus den magnetischen Feldern ernten, die durch den Jupiter entstehen. Die Forscher gehen davon aus, daß die Magnetfelder einen Stromfluß durch die gesamten Wassersäule von Europas Meeren erzeugen, sodaß der Roboterfisch durch einen ausgestreckten elektrodynamischen Tether genug Energie ernten kann, um alle seine Systeme mit Strom zu versorgen.
Der gewonnene Strom wird zur Elektrolyse von Wasser verwendet, wobei die Spaltprodukte H2 und O2 im Körper des Roboters gespeichert werden. Die Gase können dann nach Bedarf gemischt und entzündet werden, wobei sich zwei Möglichkeiten als Antrieb anbieten: Die Explosionen könnten entweder dazu führen, daß sich der Körper und die Glieder des Robots ausdehnen und zusammenziehen, so daß er dadurch vorwärts ,schwimmt’, oder die Explosionen werden viel direkter verwendet, um den Roboter mittels Abgasstrahl aus der Rückseite wie einen Kraken vorwärts zu treiben.
Zudem soll der gewonnene Strom Onboard-Sensoren für die Untersuchung der Umgebung betreiben sowie eine Leuchthaut aktivieren, die das umgebende Wasser erhellt, um Unterwasser-Fotos zu machen. Der finale Report der Phase 1 erscheint im März 2016 unter dem Titel ,Soft-Robotic Rover with Electrodynamic Power Scavenging’, er umfaßt 59 Seiten und ist im Netz abrufbar. Es läßt sich aber nichts darüber finden, daß das Projekt anschließend weiterverfolgt wurde.
Über den Einsatz ähnlicher Technologien im Orbit der Erde, wo Theter das irdische Magnetfeld anzapfen, berichte ich ausführlich im Kapitelteil Alternative Antriebe in der Raumfahrt (s.d.).
Im September 2015 berichtet die Presse über die Bachelorarbeit
von Basil Brunner und Daniel Strässler an
der Zürcher Hochschule für Angewandte Wissenschaften (ZHAW),
die einen drahtlosen Sensor entwickelt haben, der
die mechanische Spannung im Stahl von Betonbauwerken messen kann. Um
deren Zustand zu überwachen und geeignete Instandsetzungsmaßnahmen
zu ergreifen mußten bislang verkabelte Sensoren unter viel Aufwand
einbetoniert und über einen wetterfesten Stecker mit der Außenwelt
verbunden werden.
Der neue Sensor basiert auf Dehnmeßstreifen, die auf dem Stahl im Beton angebracht werden und die mechanische Dehnung in ein elektrisches Signal umwandeln, welches an den Sensor weitergeleitet wird. Dieser wandelt das Signal in digitale Meßwerte und übergibt sie an einen RFID-Baustein, so daß diese Daten über eine integrierte Antenne von einem Reader drahtlos abgefragt werden können. Das Wesentliche ist die Verwendung eines passiven, batterielosen Sensors, der nur dann Signale mißt und sendet, wenn ein Reader diese abfragt und keine teure Infrastruktur an der Außenseite des Bauwerks benötigt.
Statt dessen muß die Antenne des Readers lediglich an die Oberfläche des Bauwerks über den einbetonierten Sensor gehalten werden. Das Energy Harvesting kommt zum Tragen, indem die Antenne des Readers beim Messen ein hochfrequentes Magnetfeld erzeugt, welches den einbetonierten Sensor mit genügend Energie versorgt, so daß er eine Messung vornehmen und seine Daten übermitteln kann. Bis zu einer Tiefe von 40 cm kann die Antenne den Sensor identifizieren und bis zu 15 cm mit genügend Energie für das Messen versorgen.
Der Sensor kann bis zu 100 Meßwerte pro Sekunde liefern, so daß sich auch dynamische Vorgänge überwachen lassen, z.B. wie stark eine Brücke belastet wird, wenn ein Lastwagen darüberfährt. In einem ersten Feldversuch sollen zusammen mit der enertec engineering AG aus Winterthur, die die Arbeit unterstützt hat, zwei Sensoren in einer Autobahnüberführung an der A1 einbetoniert werden. Es läßt sich aber nicht belegen, da es dazu gekommen ist.
Im November 2015 wird von der Firma Jennova
Inc. eine neue, patentierte elektrodynamische Energy Harvesting
(EH)-Technologie eingeführt, die die Erfassung und Verstärkung der
aus der Rotation oder Bewegung anderer Geräte gewonnenen Energie vereinfachen
und intelligente Sensoren und IoT-Anwendungen mit Strom versorgen soll.
Hierzu nutzt der Rotation Energy Harvester die magnetische
Induktion, indem Magnete an der Rotationsquelle angebracht
und die Energiegewinnungsplatine an der gewünschten Stelle befestigt
werden. Um die Leistung zu steigern kann die Anzahl der Magnete erhöht
werden.
Die im Jahr 2008 von Christian und Terry Pennisi gegründete und in Oak Ridge beheimatete Firma bezeichnet sich als Spezialist für intelligente Energiemanagementlösungen und spricht auf ihrer Homepage noch von drei weiteren Arten des Energy Harvesting, die sie verfolgt: bewegungsbasiertes auf der Basis von Vibration, strömungsbasiertes aus Flüssigkeit oder Luft und drahtloses Harvesting von Umgebungsfrequenzen. Das Unternehmen scheint 2016 und 2017 noch aktiv gewesen zu sein, doch eine tatsächliche Geschäftstätigkeit läßt sich nicht belegen.
Im Juli 2016 veröffentlichen Christopher
F. Chyba von der Princeton University und Kevin
Peter Hand vom Jet Propulsion Laboratory des California
Institute of Technology eine Arbeit, in der die Möglichkeit
der Stromerzeugung durch die Rotation eines Objekts durch das Magnetfeld
der Erde untersucht wird (,Electric Power Generation from
Earth’s Rotation through its Own Magnetic Field’). Schon die Idee
stößt auf Kritik, da die meisten Experten davon ausgehen, daß jede
Nettospannung durch die Neuordnung der Elektronen während des Erzeugungsprozesses
aufgehoben wird.

von Chyba
Um zu beweisen, daß die Idee etwas taugt, bauen die Wissenschaftler ein zylindrisches, 1 m langes Gerät aus Mangan-Zink-Ferrit, um damit in einem dunklen, fensterlosen Labor zu experimentieren. Bestimmte komplexe Materialkonfigurationen, wie eben das weichmagnetische Mangan-Zink-Ferrit, können das Magnetfeld der Erde so kanalisieren, daß sie die Fähigkeit der elektrostatischen Kraft, die erzeugte Elektrizität aufzuheben, übertreffen.
Während das Labor unbeweglich bleibt, trägt die Erdrotation den Hohlzylinder durch das nicht rotierende Magnetfeld (die Komponente des Feldes, die symmetrisch zur Rotationsachse der Erde ist), wobei er - wie von Chyba und Hand ursprünglich vorhergesagt - tatsächlich eine winzige Spannung von 17 µV erzeugt, wenn es senkrecht zum Magnetfeld gehalten wird. Auch bei einem Experiment in einer anderen Umgebung als dem Labor - in einem wenige Kilometer entfernten Wohnhaus - werden dieselben Ergebnisse erzielt. Wenn jedoch ein massives Stück des Leiters verwendet wird und nicht ein hohles Rohr, ist die Spannung gleich null.
Der pensionierte Physiker Rinke Wijngaarden, der früher an der Vrije Universiteit Amsterdam tätig war, kann den Effekt bei seinen Experimenten im Jahr 2018 jedoch nicht reproduzieren und ist daher überzeugt, daß die Theorie von Chyba et al. nicht stimmen kann. Danach ist über eine lange Zeit nichts darüber zu finden, daß der Effekt, der nahezu weltweit und ohne Unterbrechungen zur Verfügung stehen würde, weiter getestet und untersucht wird, um zu sehen, ob er für die praktische Stromerzeugung skaliert werden kann.
Erst im März 2025 erscheint die Sache ein weiteres Mal in den Fachblogs, als Chyba und Hand gemeinsam mit Thomas H. Chyba von der Firma Spectral Sensor Solutions LLC eine zweite Studie unter dem Titel ,Experimental demonstration of electric power generation from Earth’s rotation through its own magnetic field’ veröffentlichen, die diesmal auch im Netz einsehbar ist. Es bleibt abzuwarten, ob es nun zu einer Verifizierung durch dritte Seiten kommt.
Ein Team der University of California, San Diego (U.C.
San Diego) um Jinxing Li und Joseph Wang publiziert
im September 2016 die Studie ,Magnetically Propelled
Fish-Like Nanoswimmers’, in welcher über einen magnetisch angetriebenen
Nanoroboter berichtet wird, der für die nicht-invasive Chirurgie, die
Manipulation einzelner Zellen und die gezielte Verabreichung von Medikamenten
durch die Adern schwimmt.
Die fischähnlichen Nanoschwimmer sind 4,8 μm lang und haben einen Durchmesser von 200 nm. Sie bestehen aus winzigen Gold- und Nickelsegmenten, die durch drei flexible, poröse silberne Scharniere verbunden sind. Die beiden äußeren Goldsegmente dienen als Kopf und Schwanzflosse, während die beiden inneren Nickelsegmente den Körper bilden. Jedes Segment ist etwa 800 nm lang. Ein externes oszillierendes Magnetfeld wird verwendet, um das Nickel zu manipulieren und eine Wellenbewegung zu erzeugen, die dem Schwimmstil echter Fische nachempfunden ist und den Roboter vorwärts treibt. Die Geschwindigkeit und Richtung werden durch die Ausrichtung und Stärke des Magnetfelds bestimmt.
Experimente zeigen, daß der Nanofisch deutlich effizienter ist als ähnliche Schwimmer, die zumeist schraubenförmige Propeller einsetzen, um sich durch den Blutkreislauf zu bewegen. Er erzeugt Wanderwellenbewegungen mit Geschwindigkeiten von über 30 μm/s. Dem Team zufolge wird bereits an einer biologisch abbaubaren Version gearbeitet, damit das Metall der Nanofische nicht im Körper verbleibt.
Einen weiteren Mikroroboter, der durch Magnetfelder gesteuert wird, stellen Wissenschaftlern der North Carolina State University (NC State) um Prof. Joseph B. Tracy im März 2017 vor. In der Studie ,Chained Iron Microparticles for Directionally Controlled Actuation of Soft Robots’, die gemeinsam mit Kollegen der Elon University und der University of Tulsa erstellt worden ist, wird eine neue Methode beschrieben, um weiche Roboterteile fernzusteuern, indem mikroskopisch kleine Eisenpartikel in Polymerfolien eingebettet werden - nachdem zuvor versucht worden war, die Teile mit im Labor produzierten magnetischen Nanopartikeln herzustellen.
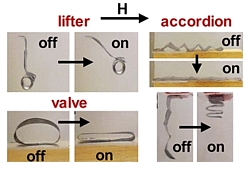
Zur Herstellung der magnetisch steuerbaren Robo-Teile wird ein flüssiges Polymer in Form von Filmen mit 4 µm großen Eisenmikropartikeln beladen. Nach dem Abkühlen wird das Material in Streifen schnitten. Wird dann ein Magnetfeld eingeschaltet, ordnen sich die Teilchen durch Selbstorganisation zu Ketten an, die die Form des Materials verändern und so komplexe Funktionen ermöglichen. Das Team der NC State konstruiert Ziehharmonikas, die sich falten, und Röhren, die sich zusammendrücken lassen - sowie Ventile, Pumpen und sogar Ausleger, die Lasten bos zum 50-fachen der Masse des Polymerfilms anheben können - alles durch Einschalten eines Magnetfelds und in Videos dokumentiert.
Daneben wird eine neue Metrik entwickelt, um die Stärke der Materialien zu messen: das ,spezifische Drehmoment’. Dieses Maß berechnet das Drehmoment bzw. die Rotationskraft pro Masseneinheit der Mikropartikel pro Einheit des Magnetfelds. Durch den Vergleich des spezifischen Drehmoments zwischen unterschiedlich geformten Roboterteilen läßt sich feststellen, wie stark die einzelnen Teile sind und wie sie im Vergleich zu anderen Modellen abschneiden.
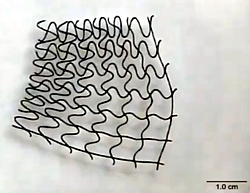
Die Forschungsgruppe um Tracy veröffentlicht im Januar 2019 eine weitere Studie unter dem Titel ,3D-Printed Silicone Soft Architectures with Programmed Magneto-Capillary Reconfiguration’. Hier geht es um 3D-gedruckte dehnbare Netze, die auf dem Wasser schwimmen und mit magnetischen Partikeln versehen sind, so daß sie sich dehnen und stauchen können, um kleine Objekte aufzunehmen und zu bewegen.
Um dieses ,Roboter-Gewebe’ herzustellen, wird zunächst eine ,Tinte’ aus Silikon-Mikroperlen, Eisencarbonylpartikeln, flüssigem Silikon und Wasser gemischt. Diese Tinte mit der Konsistenz einer Paste kann in 3D in verschiedenen Maschenformen gedruckt werden, die dann in einem Ofen ausgehärtet werden, um weiche, flexible Strukturen zu bilden. Diese sind so leicht, daß sie wie ein Insekt auf der Wasseroberfläche schwimmen können.
Um die Strukturen zu steuern, wird die Stärke des Magnetfelds erhöht bzw. verringert oder es wird ein- und ausschaltet. Das Einschalten des Magnetfelds kann zum Beispiel dazu führen, daß sich das Netz an einem Ende zusammenzieht, bevor es auf seine volle Größe zurückspringt, wenn das Feld wieder ausgeschaltet wird. Durch Veränderung der Größe und Form der Maschen können verschiedene Roboter-Designs für unterschiedliche Zwecke entstehen.
In einem Beispiel wird eine Art Greifer in Form einer Feder mit einer Klaue an einem Ende hergestellt. Wenn das Magnetfeld eingeschaltet wird, zieht sich der Federteil zusammen und zieht die Klaue mit sich. Indem das Feld ein- und ausgeschaltet wird, kann die Klaue ausgefahren werden, eine kleine Aluminiumkugel ergreifen und sie mit sich ziehen.
In einem anderen Beispiel wird ein großes, flaches Blatt mit mehreren ,Drähten’ angefertigt, die in der Mitte gebündelt sind. Wird das Magnetfeld eingeschaltet, zieht sich das Netz zur Mitte hin zusammen, so daß es einen Wassertropfen auf seiner Oberfläche halten kann. Schaltet man das Feld aus, dehnt sich das Netz wieder auf seine volle Größe aus und läßt den Tropfen in das darunter liegende Wasser fallen. Diese Konstruktion könnte den Transport von Flüssigkeiten ermöglichen und die Möglichkeit bieten, sie bei Bedarf zu mischen.
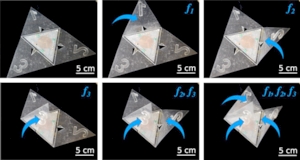
Auch ein Forscherteam der Harvard University um Mustafa Boyvat arbeitet an Robotern, die über ein drahtloses Magnetfeld gesteuert werden können, wie im Juli 2017 berichtet wird. Die einsehbare Studie ,Addressable wireless actuation for multijoint folding robots and devices’ beschreibt selbstfaltende, batterie- und kabellose Roboter, die vom japanischen Origami inspiriert sind und Orte erreichen und Dinge tun können, die herkömmliche Roboter nicht schaffen. Zudem soll das skalierbare Design sowohl kleinere als auch größere Versionen ermöglichen.
Faltroboter sind eine besondere Version der Roboterfertigung auf Abruf, bei der eine vorgefaltete Version des Geräts an eine ansonsten schwer zugängliche Umgebung gebracht wird, wo sie dann in die vorgesehene physische Konfiguration ge- oder entfaltet wird, um vor Ort nützliche Arbeit zu verrichten. Im Gegensatz zu früheren, eher einfachen Origami-Robotern und selbstfaltenden Designs sind die neuen Faltroboter in Bezug auf Form und potentielle Funktion komplexer.
Das Team entwirft und demonstriert mehrere Systeme, darunter einen etwa 25 mm großen flachen Tetraeder-Roboter - ein Origami-Muster mit sechs Stäben - und einen handgroßen Schiffsroboter aus gefaltetem Papier. Damit sich diese bewegen können, sind zwei Strukturen in ihre Gelenke eingebaut: Spulen aus Formgedächtnislegierungen (SMA), die den Roboter in seine ursprüngliche Form zurückbringen, wenn er erhitzt wird, und Miniaturschaltkreise, die aktiviert werden, wenn sie mit unterschiedlichen magnetischen Resonanzfrequenzen beschossen werden.

Durch Änderung der Frequenzen können die Roboter dazu gebracht werden, ihre Gelenke nach Bedarf und unabhängig voneinander zu falten. Ebenso besteht die Möglichkeit, mehrere Gelenke gleichzeitig zu falten, indem die Bots überlappenden elektromagnetischen Frequenzen ausgesetzt werden. Das Team demonstriert mehrere Freiheitsgrade sowohl im Zentimeter- als auch im Millimetermaßstab und ist in der Lage, die Geräte ohne physischen Kontakt zu bewegen und zu entfalten, während sich die Roboter außerhalb der Sichtweite befinden.
Besonders interessant ist eine Umsetzung als Mikroorigami-Roboterarm, der als funktionierender Prototyp vorgeführt wird. Hier kommt neben den sechsgliedrigen Origami-Faltmustern auch ein adaptiver Greifer zum Einsatz. Durch magnetische Steuerung nimmt er verschiedene Positionen ein, wie Linksdrehung und Rechtsdrehung, Aufrichten sowie offenem bzw. geschlossenem Greifer.
Der Physiker Oliver G. Schmidt wird im März 2018 mit
dem renommierten Leibniz-Preis für seine Entwicklung des Spermbot ausgezeichnet,
mit dessen Hilfe die künstliche Befruchtung in vitro, also
im Glas, ersetzt werden soll.
Das gemeinsam mit Mariana Medina-Sánchez und einem Team des Leibniz-Instituts für Festkörper- und Werkstofforschung Dresden (IFW) und der TU Chemnitz konstruierte Gerät ist kein autonomer Roboter, sondern ein Mikromotor für Samenzellen, der mit Hilfe eines Magnetfelds angetrieben und gesteuert wird, um schwimmunfähigen Spermien als Antrieb zu dienen. Das helixförmige Fahrzeug aus Polymer sieht aus wie ein Schräubchen und mit etwa 10 µm Länge so bemessen, daß ein Spermium genau hineinpaßt. Es soll sich von hinten einer Samenzelle nähern, diese erfassen und ohne Umwege zur Eizelle bringen.
Die magnetischen Spermbots drehen sich wie ein Schiffsmotor um die eigene Achse. Im besten Fall erreichen sie Geschwindigkeiten von etwa 20 µm pro Sekunde. Zum Vergleich: Gesunde Spermien sind bis zu 70 µm pro Sekunde schnell. Einmal am Ziel angekommen, stößt der Minitransporter das Spermium ab, es befruchtet die Eizelle – und die Zeugung ist perfekt. Experimente im Labor mit Spermien von Rindern funktionieren bereits.
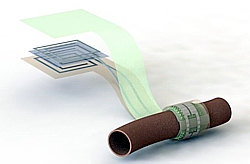
Im Januar 2019 veröffentlichen Forscher der Stanford University um Prof. Paige M. Fox einen Artikel namens ,Biodegradable and flexible arterial-pulse sensor for the wireless monitoring of blood flow’, in welchem sie einen batterielosen Sensor beschreiben, der es Ärzten erleichtern soll, den Erfolg von Operationen an Blutgefäßen aus der Ferne zu überwachen. Die bislang klinisch verfügbaren postoperativen implantierbaren, kabelgebundenen Überwachungstechnologien erfordern eine sorgfältige Fixierung für eine genaue Erkennung und müssen zudem nach Gebrauch wieder entfernt werden.
(Grafik)
Bereits im Mai 2018 hatte das Team um Fox den Bericht ,A stretchable and biodegradable strain and pressure sensor for orthopaedic application’ veröffentlicht, in dem ein implantierbarer Druck- und Dehnungssensor beschrieben wurde, der vollständig aus biologisch abbaubaren Materialien besteht, so daß keine zweite Operation zur Entfernung des Geräts erforderlich ist. Der Sensor ist die drahtlose Version einer Technologie, die Prof. Zhenan Bao schon 2015 an der Stanford University entwickelt hatte, um Prothesen einen feinen Tastsinn zu verleihen.
Inzwischen wurden die Materialien des bestehenden Sensors so verändert, daß er auf pulsierendes Blut anspricht, aber gleichzeitig steif genug ist, um seine Form zu behalten. Außerdem wurde die Antenne an eine Stelle verlegt, an der sie nicht durch die Pulsation beeinträchtigt wird, während der Kondensator so umgestaltet wurde, daß er um eine Arterie herum plaziert werden kann.
Der nun vorgestellte neue Drucksensor, der den Blutfluß durch eine Arterie sowohl im Kontakt- als auch im berührungslosen Modus mißt und den Arzt eines Patienten warnt, wenn eine Verstopfung vorliegt, basiert auf der Streufeldkondensator-Technologie (Fringe-Field Capacitor Technology), bei der elektrische Felder genutzt werden, um Veränderungen in der Umgebung zu messen. Er wird eng um das heilende Gefäß gewickelt, wo das vorbeiströmende Blut auf seine Innenfläche drückt. Wenn sich die Form dieser Oberfläche ändert, verändert sich auch die Fähigkeit des Sensors, elektrische Ladung zu speichern, was Ärzte mit einem Gerät in der Nähe der Haut, aber außerhalb des Körpers, feststellen können.
Dieses Gerät, das in Zukunft in Form eines Pflasters auf die Haut geklebt oder in eine andere Technologie integriert werden könnte, z.B. in ein tragbares Gerät oder ein Smartphone, liest den Wert aus, indem es die Antenne des Sensors anstößt, ähnlich wie bei einem Ausweisscanner. Dies geschieht durch eine induktive Kopplung zwischen einer externen Spule, die ein magnetisches Wechselfeld erzeugt, und der kleinen Spule des Sensors. Damit wird dieser mit Energie versorgt und kann gleichzeitig die gemessenen Daten drahtlos an ein externes Gerät übertragen.
Das Team demonstriert die Funktionsweise an einem speziell angefertigten künstlichen Arterienmodell und in vivo an Ratten und ist nun dabei, die beste Methode zur Befestigung der Sensoren an den Gefäßen zu finden und ihre Empfindlichkeit zu verfeinern. Bislang sind aber keine weiterführenden Informationen zu finden.
Ebenfalls sehr interessant ist die einsehbare Studie ,Ferromagnetic soft continuum robots’, die im August 2019 von Wissenschaftlern des Massachusetts Institute of Technology (MIT) um Prof. Xuanhe Zhao veröffentlicht wird. Das Team stellt darin einen neu entwickelten magnetisch lenkbaren, fadenähnlichen Roboter vor, der aktiv durch enge, gewundene Pfade gleiten kann, wie z.B. die labyrinthartigen Blutgefäße des Gehirns. Mit bestehenden endovaskulären Technologien gekoppelt könnte der Roboterfaden genutzt werden, um Verstopfungen und Läsionen, wie sie bei Aneurysmen und Schlaganfällen auftreten, schnell zu behandeln.
des MIT
In den letzten Jahren hat das Team sowohl bei Hydrogelen als auch bei 3D-gedruckten, magnetisch betätigten Materialien, die so gestaltet werden können, daß sie krabbeln, springen und sogar einen Ball fangen können, indem sie der Richtung eines Magneten folgen, Erfahrung gesammelt. Nun kombinieren die Forscher ihre Arbeiten in beiden Bereichen, um einen magnetisch lenkbaren, mit Hydrogel beschichteten Roboterfaden herzustellen, der dünn genug ist, um ihn magnetisch durch eine lebensgroße Silikon-Nachbildung der Blutgefäße des Gehirns führen zu können.
Der Kern des Fadens besteht aus der biegsamen und elastischen Nickel-Titan-Legierung Nitinol, die mit einer gummiartigen Paste oder Tinte beschichtet ist, in die es magnetische Partikel einbettet sind. Dann wird die magnetische Hülle mit Hydrogel beschichtet, das die Reaktionsfähigkeit der darunter liegenden magnetischen Partikel nicht beeinträchtigt und dem Draht dennoch eine glatte, reibungsfreie und biokompatible Oberfläche verleiht.
Die Präzision und Aktivierung des Roboterfadens wird demonstriert, indem ein großer Magnet verwendet wird, um den Faden durch einen Hindernisparcours aus kleinen Ringen zu lenken. Ebenso wird der Faden in einer lebensgroßen Silikonnachbildung der wichtigsten Blutgefäße des Gehirns getestet, indem der Magnet das Modell durch die gewundenen, engen Pfade der Gefäße steuert. Zudem kann der Roboterfaden mit zusätzlichen Funktionen ausgestattet werden, um z.B. gerinnungshemmende Medikamente zu verabreichen oder Verstopfungen mit Laserlicht aufzulösen. Indem der Nitinolkern durch eine optische Faser ersetzt wird, läßt sich der Roboter magnetisch steuern und der Laser aktivieren, sobald die Zielregion erreicht ist.