Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Andere elektrische Fahrzeuge
Podcars und People Mover (I)
Wie oben bereits erwähnt,
gilt die Abkürzung PRT für
Personal Rapid Transit seit den 1960ern als Oberbegriff
für die hier vorgestellten Technologien. Häufig wird dieser Begriff
allerdings auf zentral gesteuerte, fahrerlose und am Boden fahrende
Elektromobile beschränkt, die ab den 1970er Jahren
zumeist als Podcars bezeichnet
weden. In Deutschland wird zunächst der Begriff Kabinentaxi verwendet.
Der Haupunterschied zu den weiter oben beschriebenen Systemen ist,
daß Podcars nicht schienengeführt sind, auch wenn sie manchmal eigene
Fahrspuren besitzen.
Mit Group Rapid Transit (GRT) werden PRT-Systeme mit größeren Fahrzeugen und Gruppen von Passagieren mit potentiell unterschiedlichen Start/Ziel-Punkten bezeichnet – so daß man GRT-Systeme auch als eine Art horizontale Aufzüge betrachten kann. Als gemeinsamer Überbegriff für BRT und GRT gilt Automated Transit Networks (ATN).
Stark involviert in die Verbreitung dieser Technologie ist die 1976 gegründete Advanced
Transit Association (ATRA), eine Non-Profit-Organisation
zur Förderung innovativer Transitkonzepte, die sich nicht auf
einen speziellen Anbieter konzentriert. Die Ursprünge
der ATRA gehen mindestens auf das Jahr 1953 zurück,
als der amerikanische Stadtverkehrsplaner Don Fichter -
damals noch als Student - mit Forschungen an PRT-Systemen und alternativen
Transit-Modi beginnt (Veyar-System). 1964 veröffentlicht
er ein
Buch unter dem Titel ‚Individualized Automated Transit in the
City’, in welchem er u.a. auch das Konzept
automatisierter Nahverkehrssysteme beschreibt.
Ebenfalls
im Jahr 1953 wird
der Bauunternehmer Edward O. Haltom mit
der Aufgabe betraut, ein Monorail-System zu bauen. Bei seinen Untersuchungen
stellt er fest, daß eine der größten Schwierigkeiten von Einschienenbahnen
die Zeit ist, welche für den Aufenthalt an jeder Station benötigt
wird. Aufgrund des Abstands zwischen den Fahrzeugen ist es nur
möglich, 20 bis 40 Züge pro Stunde passieren zu lassen. Zur Lösung,
und auch um die Größe der Führungsschiene und die Kosten zu reduzieren,
konzipiert Haltom ein Monocab System
aus vielen kleinen, automatisch gesteuerten Fahrzeugen, um die
Taktzeiten zu reduzieren. Da das System schienengeführt ist,
habe ich es den Monorails zugeordnet
(s.o.).

Um 1955 herum gründet William L. Alden die Firma Self-Transit Systems Corp. mit der Idee, ein Dual-Mode PRT-System zu entwickeln, bei dem kleine Autos in der Stadt für kurze Strecken wie herkömmliche Elektroautos bei niedriger Geschwindigkeit betrieben werden, während Fernreisen bei 95 km/h mittels automatisierter Führungen erfolgen, die gleichzeitig auch die benötigte Energie zur Verfügung stellen. Miterfinder ist Martin Gilvar, der ebenso wie Alden aus Boston stammt. (Mehr über die Dual-Mode-Technik findet sich im Kapitelteil Weitere Technologien).
Der Alden staRRcar (Self-Transport Road and Rail Car) wird tatsächlich gebaut und ab 1968 mitsamt seinem Führungssystem zuerst in Wetboro und dann auf einem Parkplatz in Bedford, Massachusetts, getestet. Und obwohl Investoren mehrere Millionen Dollar beisteuern, bleiben geschäftliche Erfolge aus.

Die Versuchsmodelle auf einem rechteckigen Stahl-Chassis mit sehr kleinen Gummirädern haben eine keilförmige Leichtbaukarosserie, während das Heck des Fahrzeugs aus einer einzige Glasscheibe besteht. Zwei kleine Führungsräder, in der Regel dem Blick verborgen, fahren aus den Seiten des Fahrzeugs aus, sobald dieses in seine U-förmige Führungstrasse mit innenliegender Stromschiene einschwenkt. Außerdem wird ein Modell im Maßstab 1:20 mit zehn Fahrzeugen und vier Wechselstationen verwendet, um die Führungssysteme und den Fahrtmoduswechsel zu testen.
Im Laufe der langjährigen Entwicklung verändert sich das Design jedoch sehr stark: Aus dem Drei-Personen-Fahrzeug (andere Quellen: 4 Personen) mit Dual-Mode-Betrieb wird schließlich ein wesentlich größerer People Mover für zuerst 6 und später sogar 20 Personen. Im Jahr 1970 erhält Boeing Vertol den Bauauftrag für eine Demonstrationsanlage in Morgantown, West Virginia, die auf diesem Entwurf beruht (s.u.). Ein weiteres kleineres System wird durch den japanischen Lizenznehmer Kobe Steel für die Expo’75 in Okinawa gebaut (Kobe Rapid Transit System). Probleme gibt es in beiden Fällen mit Schnee, der sich gerne in der Fahrrinne sammelt und von dort nur schwer wieder entfernt werden kann. Eine angedachte Streckenbeheizung erweist sich als extrem energieaufwendig.
Nach dem Erfolg in Morgantown und dem Ausbleiben von Folgeaufträgen beschäftigt sich Aldens Firma mit automatisierten Fertigungssystemen – und wird im Jahr 1983 an einen Mitarbeiter verkauft. Nach 20 Jahren in der Filmindustrie wird Alden wieder ‚unruhig’ und beschließt 2004, wieder im weltweiten öffentlichen Nahverkehr mitzumischen. Mit einem neuen Unternehmen namens Alden DAVe Systems (Dual-mode Autonomous Vehicle) in East Falmouth, Massachusetts, entwickelt er gemeinsam mit seinem Partner, Prof. Emilio Frazzoli vom MIT, ein Dual-Mode-Fahrzeug, das er Universitäten und großen Filmstudios als Transportsystem anbietet. Im Gegensatz zu anderen Systemen benötigt ein DAVe keine gesonderte Führungsspur in den Niedriggeschwindigkeits-Teilen des Netzwerks und kann sogar selbständig zwischen Fußgängern umherfahren. Einer Meldung von 2011 zufolge sei das MIT bereit, für 100.000 $ einen Prototypen zu bauen, doch um mit dem Geschäft richtig loslegen zu können benötigt Aldens Firma aber 6 Mio. $, die sich bislang noch nicht haben beschaffen lassen.
1961 beginnt
sich Lloyd E. Berggren bei der Firma Honeywell
Inc. mit PRT-Systemen zu beschäftigen. Er hält es für sehr
wichtig, die Kosten und das Gewicht des Fahrzeugs auf ein Minimum zu
reduzieren – und ersinnt ein Konzept, um die Motoren in der Strecke
und nicht im Fahrzeug zu installieren. Mit seinem starken Hintergrund
im Bereich hydraulisch betriebener Geräte findet er einen Weg um Luftdüsen
sowohl für das Schweben als auch für das Antreiben der Fahrzeuge einzusetzen,
woraus ein sehr einfaches Fahrzeug-Design resultiert – eine passive,
personentransportierende Kabine, deren gesamte Antriebs- und Steuerungskomponenten
in der Spur integriert sind. Das System hat aber den großen Nachteil,
daß die Fahrzeuge in einer geschlossenen, 4,27 m hohen und 1,82 m breite
Röhre fahren müssen, was mit einer erheblichen visuellen Wirkung und
hohen Kosten verbunden ist.
Berggren ist in der Lage, für sein Uniflo genanntes System Unterstützung zu erhalten, um von der Rosemont Engineering Co. und später von Stone & Webster eine Full-Scale-Teststrecke bauen zu lassen, über die ich jedoch bislang nichts Näheres herausfinden konnte. In den 1960ern und 1970er Jahren erscheinen verschiedene Publikationen über das auch Uniflo/PRT 70 genannte System, und die Uniflo Systems Company aus Edina, Minnesota, beantragt und erhält verschiedene Patente (US-Nr. 3.718.096 von 1973 und US-Nr. 3.808.977 von 1974). Über eine Umsetzung ist nichts zu erfahren.
(Grafik)
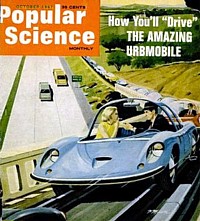
An den Cornell Aeronautic Laboratories entwickeln in den frühen 1960er Jahren Morton O. Weinberg und Robert A. Wolf im Auftrag des U.S. Department of Housing and Urban Development ein Dual-Mode-Konzept namens Urbmobile.
Sie erkennen die Notwendigkeit, die Zugfolge mit einer Taktzeit von einer halben bis einer Sekunde zu betreiben, um auf eine ausreichende Kapazität zu kommen.
Aufgrund ihrer weitreichenden Erfahrungen in der Technologie der automatischen Steuerung können sie zwar zeigen, wie es möglich wäre, Fahrzeuge in so kurzen Taktzeiten sicher zu betreiben.
Das Urbmobile System kommt zwar auf die Titelseite des Magazins Popular Science vom Oktober 1967 – wird jedoch nie gebaut.
Aus dem Jahr 1962 stammt ein weiteres
Papier, in welchem Robert J. Bartells, Direktor des
Stadtplanungsamtes von Hartford, Connecticut, die Ideen und Grundsätze
der PRT-Systeme zusammenfaßt. Die Bedeutung dieses Textes liegt darin,
daß er von einem Planer stammt, der sich auch wirklich mit den praktischen
Problemen bei der Verbesserung der Mobilität von Menschen in einer
Stadt auskennt. Auch als Professor für Städtebau an der Syracuse University
zeigt Bartells weiter sein Interesse an der PRT-Technologie.
Im gleichen Jahr 1962 beauftragt Präsident John F.
Kennedy den US-Kongreß mit der Aufgabe, die Probleme der Zersiedelung
anzugehen. Als eines der daraus erwachsenen Resultate unterzeichnet
Präsident Lyndon B. Johnson 1964 ein Gesetz (Urban
Mass Transportation Act), mit dem die Urban Mass Transportation Administration
(UMTA) gegründet wird, die uns in dieser Übersicht schon mehrfach begegnet
ist. Die Behörde hat die Aufgabe, Nahverkehrsentwicklungen zu finanzieren
und auch die Investitionskosten für den Bau der neuen Infrastruktur
zu decken. Ab 1966 läßt das US Department of Housing
and Urban Development von der UMTA insgesamt 17 Studien zu neuen städtischen
Verkehrsmittel-Systemen durchführen, die jeweils rund 500.000 $ kosten
(HUD Studies). Die Veröffentlichung dieser Studien 1968 regt
die allgemeinen Bemühungen in den frühen 1970er Jahren
an, PRT-Systeme näher zu untersuchen - so auch an der TU-Berlin, wo die
ersten entsprechenden Studien ab 1972 am Brennpunkt
Systemtechnik, einer Art Ausgründung des Instituts für Luft- und Raumfahrttechnik,
durchgeführt werden ... meinem ersten Arbeitsplatz bis 1976 (siehe Vita).
Die einflußreichsten Studien stammen vom Stanford Research Institute
(Dual-Mode PRT) und von der General Research Corp. aus Santa Barbara
(Modellierung alternativer Verkehrssysteme in Städten). Aufgrund des
politischen Wechsels zur Nixon-Regierung verbleibt die UMTA jedoch unterbesetzt
und ist nicht in der Lage, mit der Überfülle an Vorschlägen konstruktiv
umzugehen. Dazu kommt, daß sich die Lobbyisten der neuen Technologien
nicht gegen die Protagonisten der alten durchsetzen können.
Ab 1966 arbeitet
eine großen Projektgruppe am Massachusetts Institute
of Technology (MIT)
in Cambridge an PRT-Konzepten. Der 1968 veröffentlichte
Bericht unter dem Namen Project Metran (Metropolitan
Transportation) umfaßt die meisten grundlegenden Ideen der PRT-Technologien
und hat auch starken Einfluß auf ihre weitere Entwicklung. Das Team
konzentriert sich dabei auf fünf Punkte:
1. Die Entwicklung eines Systems, um Fahrten mit dem Auto zu verbessern, indem dieses mit einer automatischen Steuerung und einer neuen Energiequelle ausgestattet wird.
2. Das Konzept separater Straßen nur für Busse (bus-only streets, BOS), bei dem jede dritte oder vierte Straße für 40-Personen-Fahrzeuge mit Mehrfachtüren reserviert ist, die ein schnelles Ein- und Aussteigen erlauben.
3. Ein personalisiertes Kapsel-Transportsystem (Personalized Capsule, PERC) für sehr dichte Stadtkerne, in dem Leichtbaukabinen für 2 Personen kursieren, die sich zu 4-Personen-Kapseln zusammenschließen lassen. Bei einer Betriebsgeschwindigkeit von rund 30 km/h ist damit eine Kapazität von rund 20.000 Personen pro Stunde erreichbar.
4. Der Entwurf eines automatisierten Fahrwegs, der von Autos und Bussen genutzt wird, die auch auf gewöhnlichen Straßen fahren können. Zur Energieversorgung werden Stromschienen am Fahrweg vorgeschlagen, bzw. Elektromotoren oder Brennstoffzellen, wenn die Fahrzeuge abseits der Schiene unterwegs sind. Das System würde eine Kapazität von rund 12.000 Fahrzeugen pro Stunde erreichen, die sich mit rund 95 km/h fortbewegen. Unter dem Namen Automated Highway System (AHS) wird dieses Konzept später in den USA weiterverfolgt. Eine ebenfalls genutzte Bezeichnung ist Automated Guideway Transit (AGT).
5. Ein System namens GENIE, das aus einer Reihe kleiner 10-Personen-Fahrzeuge für die Beförderung in vorstädtischen Gebieten niedriger bis mittlerer Dichte besteht. Dabei sollen die Fahrzeuge außerhalb der Führungsspur von Fahrern manuell gesteuert werden, während das Routing innerhalb der Fahrwege zentral gesteuert erfolgt. Diese als DualMODE bekannte Technologie wird auch von verschiedenen anderen Seiten untersucht. Im gegenwärtigen Stand dieser Übersicht habe ist sie unter Weitere Technologien behandelt (s.d.).
Mitte der 1960er Jahre
wird A. Jarold
Kieffer, Leiter der School of Public Affairs an der Universität
von Oregon, gebeten, den Gouverneur von Oregon in Fragen der Verkehrsplanung
zu beraten. Auch Kieffer erkennt die Probleme innerstädtischer Zug-Systeme
und stellt fest, daß sie in den meisten Städten aufgrund ihrer hohen
Baukosten keinen wesentlichen Beitrag zur Verringerung des individuellen
Autoverkehrs leisten können. Bei einem Skiurlaub bringt ihn ein Skilift
endlich auf neue Ideen, die er 1967 in einem Bericht
veröffentlicht. Durch seinen Vorsitz bei der Advanced Transit Association
(ATRA) hat er auch danach noch großen Einfluß auf die Weiterentwicklung
der PRT-Systeme.
Ab 1966 veröffentlicht L.
R. Blake in Großbritannien mehrere Artikel und Berichte über
PRT-Systeme, nachdem er in den USA den Alden staRRcar, das Urbmobile
und andere Entwicklungen kennengelernt hatte.

Er destilliert daraus ein öffentliches Transportsystem mit automatischen Taxis, das speziell für britische Städte zugeschnitten ist, und das er sinnigerweise Autotaxi nennt. Blakes Arbeit beginnt als privates Unternehmen und wird später an die Brush Electrical Engineering Co. in Loughborough verkauft, einen Hersteller von Generatoren für Gas- und Dampfturbinen.

Es gelingt der Firmenleitung den Verkehrsminister für die Idee zu begeistern, und das britische Luftfahrt-Unternehmen Royal Aircraft Establishment (RAE) in Farnborough Hants wird damit beauftragt, das Autotaxi-Konzept zu untersuchen. Hier erfolgt auch die Umbenennung in Cabtrack. Mit dem National Research and Development Board wird eine Vereinbarung geschlossen, um 50 % der Entwicklungskosten für eine betriebsbereite Teststrecke zu tragen. Das Gesamtbudget beträgt 250.000 £.
Nach einer neunmonatigen Studie wird im Dezember 1968 ein umfassender Bericht vorgelegt. Durch Folgeverträge kann die RAE ein testfähiges Modell im Maßstab 1:5 herstellen. Aus einem Miniaturmodell des Systems, von dem es noch Abbildungen gibt, wird ersichtlich, daß sich die Fahrzeuge auf exklusiven, aufgeständerten Fahrspuren bewegen sollen, während in den Grafiken zu sehen ist, daß zur Energieversorgung alternativ Oberleitungs-Stromabnehmer vorgesehen sind. Das britische Architekturbüro Robert Matthew, Johnson-Marshall & Partners erhält den Auftrag für eine Studie über die Integration des Cabtrack-Systems in einem Viertel von London, die im Mai 1971 veröffentlicht wird. Nach einer Neuwahl in Großbritannien und der Ernennung eines neuen Umweltministers im Frühjahr 1972 wird das Cabtrack-Programm jedoch gestoppt. Der abschließende Bericht der RAE erscheint im März 1974.
Die praktische PRT-Entwicklung in Europa wird im Jahr 1967 in
Frankreich von dem Luft- und Raumfahrtunternehmen Matra eingeleitet
(zuerst von Engins Matra, aus dem später Matra Transport International
S.A.S. wird), das sich mit einer erheblichen Investition in Höhe von
500 Mio. SFr. an dem Aramis Projekt beteiligt (französisch:
Agencement en Rames Automatisées de Modules Indépendants dans les Stations).
Im Rahmen dieses Projekts soll in den 1970er und 1980er Jahren
ein PRT-System innerhalb oder in der Nähe von Paris installiert werden,
das auf automatisierten Zügen aus unabhängigen Modulen besteht, deren
Fahrgastkabinen für 4 Personen ausgelegt sind. Finanziert wird das
Projekt von der französischen interministeriellen Agentur für Raumordnung
und regionale Attraktivität DATAR.
Aramis entwickelt sich in verschiedenen Phasen. Während der Phase 0 im Jahr 1969 wird ein Patent erarbeitet, der Standort für Tests bestimmt und ein zuständiger Entwicklungsschuß benannt. Das vorgeschlagene System besitzt speziell angefertigte Motoren, Sensoren, Steuerungen, digitale Elektronik und Software, und eine große Installation namens CET im Süden von Paris im Jahr 1970 ist als Demonstration der Technologie auch ein Erfolg. Was Aramis von anderen PRT-Systemen unterscheidet, sind die nicht-materiellen Kupplungen, d.h. Verbindungselemente, die es jedem Fahrzeug erlauben selbständig zu agieren – oder eben im Verbund zu fahren, ohne daß zwischen den einzelnen Fahrzeugen eine physische Verbindung besteht.

1972 wird in der Nähe des Flughafens Paris-Orly der Prototyp einer 800 m (andere Quellen: 1.000 m) langen Gleisstrecke vorgestellt. Diese ist mit einer festen Station, einer beweglichen Station mit Werkstatt, einer Kontrollstelle, einem Empfangsgebäude nebst Parkplatz, sowie fünf Fahrzeuge in voller Größe ausgestattet, von denen zwei für Fahrgäste, und drei für Meßgeräte reserviert sind. Die direkte Punkt-zu-Punkt-Fahrt von Passagieren, ein wesentliches Merkmal dieses PRT-Systems, wird im Jahr 1973 wegen der zusätzlichen Kosten für die Weichen gestrichen.
In Phase 1, die im Jahr 1974 beginnt, werden weitere Teststandorte installiert, ein variabler Reluktanzmotor entwickelt – und jede Konkurrenz des Aramis-Projekts eliminiert. Nicht davon betroffen ist nur das von Matra entwickelte und produzierte System Véhicule automatique léger (VAL), ein besonders leicht gebautes, fahrerloses und spurgeführtes Personennahverkehrsmittel. Während der Phase 2 wird das Aramis-Konzept ab 1977 aus wirtschaftlichen Gründen vereinfacht, gefolgt von der Phase 3A, die 1978 beginnt. Diesmal werden in erster Linie Tests der Hauptkomponenten des Systems durchgeführt. Die letzte Phase 3B beginnt 1982 und führt schließlich zur Aufgabe des Projekts im Jahr 1987 - aufgrund von technischen Mängeln, unbefriedigenden Testergebnissen und fehlenden Abnehmern - nachdem es etwa 500 Mio. Franc gekostet hat.

Zu diesem Zeitpunkt gibt es nur noch die Teststrecken in Orly bei Paris sowie am Pariser Gare de Boulevard Victor, die später ebenfalls stillgelegt werden. Matra Transport International (MTI) beschließt, sich zukünftig auf den (normalen) Nahverkehr zu konzentrieren – und wird im Jahr 1996 zu einem Joint Venture zu gleichen Teilen von Lagardere Groupe S.C.A. und Siemens. 1998 erhöht Siemens seinen Anteil auf 95 %, und 2001 übernimmt Siemens auch die restlichen Anteile, worauf MTI zu Siemens Transportation Systems (STS) umbenannt und später Teil von Siemens Mobility wird, die nun zum Hersteller der VAL-Züge wird.
Die komplette Geschichte dieses Projektes wird in dem 1993 erschienenen Buch Aramis, or the Love of Technology des französischen Soziologen und Anthropologen Bruno Latour beschrieben (die hier titelgebende Übersetzung stammt aus dem Jahr 1996). Als Gründe für das Scheitern des Projekts macht der Autor mangelnde Kommunikation, fehlende Kompromißbereitschaft, und vielleicht auch die Veruntreuung von Forschungsgeldern verantwortlich. Letztlich war das Projekt seiner Zeit zu weit voraus – denn die Steuerungs-Software ist noch nicht in der Lage, eine akzeptable Sicherheit vor dem Zusammenstoßen der Fahrzeuge zu gewährleisten.
[Zur Vermeidung von Verwechslungen: Unter dem Namen ARAMiS (mit kleinem i) fördert das Bundesministerium für Bildung und Forschung (BMBF) zwischen 2011 und 2014 das Projekt ‚Automotive, Railway and Avionics Multicore Systems’, das mit dem obigen Projekt ARAMIS jedoch nichts zu tun hat].
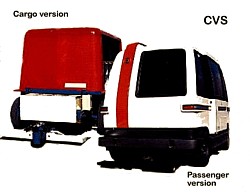
In Japan beginnt
im Jahr 1968 ein
Industrie-Konsortium mit der Entwickelung eines computergesteuerten
PRT-Netzwerks (Computer-Controlled Vehicle System,
CVS), das aus leichten Vier-Personen-Fahrzeugen besteht. Die Mitglieder
des Konsortiums sind die Firmen Toyo Kogyo, Mitsubishi Jukogyo, Tokyo
Shibaura Denki, Hitachi Seisakusho, Fujitisu, Sumitomo Denki Kogyo,
Nippon Denki und Shin-Nihon Seitetsu. Finanziert werden die Arbeiten
anteilig mit rund 10 Mio. $ vom Ministry of International Trade and
Industry (MITI) und der Japan Society for the Promotion of Machine
Industry (JSPMI). Die Projektleitung liegt in den Händen eines Teams
der Universität Tokio und des MITI.
Auf der Expo’70 in Osaka wird bereits ein Verkehrspiel-Demonstrationssystem gezeigt (Traffic Game), bei dem 10 zweisitzige kleine Elektrofahrzeuge computergesteuert auf einem schachbrettartigen Fahrwegs-Netzwerk mit Kreuzungen alle 5 m herumfahren. Neben dem Bau von Miniaturmodellen wird auch ein Netzwerk aus 1.000 Fahrzeugen simuliert.
Basierend auf diesen Forschungen wird 1971 ein verkleinertes Experiment vorbereitet. Für ein Netzwerk, das den zentralen Bereich des Bezirks Ginza in Tokio darstellt, werden Fahrzeuge im Maßstab 1:20 entwickelt, die während der 18. Tokyo Motor Show unter Computer-Steuerung von den Besuchern selbst betrieben werden dürfen.
Im Jahr 1972 wird in Higashimurayama, einem 30 km westlich liegenden Vorort von Tokio, eine 4,8 km lange aufgeständerte Testanlage mit Führungsschiene in Betrieb genommen, auf der sich in der ersten Phase 24, und später 60 Elektrofahrzeugen mit 60 – 80 km/h in dem System fortbewegen (geplant waren eigentlich 100 Fahrzeuge). Auf einem bestimmten Streckenabschnitt kann sogar überholt werden. Dabei werden Taktzeiten von einer Sekunde erreicht. Die Wagen können bei Bedarf angefordert werden und fahren direkt zum Zielort des Benutzers. Im Gegensatz zu anderen PRT-Systemen bietet das CVS auch Frachtfahrzeuge sowie ein Dual-Mode-Design, das manuell aus dem PRT-Netz herausgefahren werden kann.

Eine weitere Version des CVS wird im Juli 1975 auf der International Ocean Exposition in Okinawa vorgestellt und anschließend sechs Monate lang öffentlich betrieben. Dieses System besitzt 12 Single-Mode- und 4 Dual-Mode-Fahrzeuge, die sich auf einer 1,6 km langen Strecke mit fünf Stationen bewegen und in der genannten Zeit mehr als 800.000 Passagiere transportieren.
In den späten 1970er Jahren werden noch umfangreiche Planungen und Kalkulationsstudien unter anderem für Baltimore durchgeführt, doch 1978 wird das CVS-Programm aus einer Reihe von Gründen abgebrochen. Zu diesen zählen u.a. die Größe, die Kosten und die visuelle Wirkung der Spurführung – 3 m breit und etwa 1,8 m tief –, sowie Probleme bei Nässe und eisigem Wetter. Im Rahmen der bestehenden Sicherheitsvorschriften des Schienenverkehrs erklärt das japanische Ministry of Land, Infrastructure and Transport das System als unsicher, speziell in Bezug auf die Bremsen und die Wagenfolgedistanzen, und verweigert eine Betriebsgenehmigung.
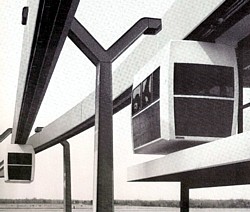
Ab 1970 forscht und entwickelt die Arbeitsgemeinschaft
Cabinentaxi (CAT) auf dem Gebiet neuer PRT-Systeme und wird dabei ab 1972 vom
Bundesministerium für Forschung und Technologie (BMFT) gefördert. Im Juni wird
eine detaillierte Projektplanung eines Joint Venture der Unternehmen Mannesmann
Demag und Messerschmitt-Bölkow-Blohm (MBB) vorgestellt,
in der die Stadt Hagen die Vorreiterrolle übernehmen soll – mit 132 km Streckenlänge
und 182 Stationen. Die Kapazität ist auf eine im Jahr 2000 erwartete
Einwohnerzahl von 400.000 Personen ausgelegt. Dabei soll das Trassennetz so dicht
sein, daß die nächste Station für jeden Bewohner nie weiter als 100 - 200 m entfernt
ist. Neben dem BMFT und dem Joint Venture sind der Technische Überwachungsverein
(TÜV), die Hamburger Hochbahn Aktiengesellschaft (HHA) sowie die Deutsche Bundesbahn
(DB) an dem Projekt beteiligt.

Bei dem Cabinentaxi-System können die Fahrzeuge raumsparend gleichzeitig sowohl über als auch unter der aufgeständerten Einschienen-Struktur fahren – z.B. in unterschiedlichen Richtungen. Dabei werden kleine, voneinander unabhängige Kabinen verwendet, mit denen die Fahrgäste mit ca. 36 km/h individuell und ohne Zwischenhalt vollautomatisch an ihr bestelltes Ziel gelangen. Der Antrieb erfolgt über zwei asynchron betriebene Linearmotoren in einer waagerechten Doppelkammanordnung (wie es der Fachmann bezeichnet). Dies bedeutet aber, daß in die Trasse kostspielige Elektromagneten und aufwendige Weichen eingebaut werden müssen, was die Fahrspur entsprechend teuer macht.
Im September 1973 wird in Hagen-Vorhalle eine 150 m lange aufgeständerte Teststrecke in Betrieb genommen, die bereits ein Jahr später kreisförmig auf 1,5 km ausgebaut wird. Auf dieser fahren fünf Kabinen, drei oben und zwei unten, die für umfangreiche Tests eingesetzt werden. Im Oktober 1975 kommt eine zusätzliche 12-Personen-Kabine hinzu, und im Jahr 1976 wird die Teststrecke auf 1,9 km erweitert, und besitzt nun sechs Stationen und 24 Kabinen. Geplant werden zu diesem Zeitpunkt Kabinen zur automatischen Beförderung von vier, sechs, acht und zwölf Personen sowie eine Variante für den Güterverkehr.
Im Jahr 1975 untersucht ein Team der Raytheon Missile Systems Division mehrere PRT-Entwicklungsprogramme und beschließt, eine Lizenz für den Einsatz des Cabinentaxi in den USA zu erwerben. Das Programm kommt anfänglich gut voran, wird dann aber im Juli 1976 zu Gunsten des Hauptgeschäfts der MSD wieder verworfen. In den späten 1970er Jahren werden 3- und 12-Personen-Versionen des Cabinentaxi im Rahmen einer umfassenden Studie über spurgeführte, automatisierte Transit-Systeme für den Einsatz im Hauptgeschäftsviertel von Indianapolis getestet, wo Fahrzeuge für 3, 12, 20, 40, 60 und sogar 100 Passagiere zum Einsatz kommen sollen (s.u.). Dabei wird festgestellt, daß die niedrigsten Gesamtkosten pro Passagierkilometer mit der kleinsten Größe erreicht werden, was auch stark seitens vieler Unternehmen, Regierungsbehören und zivilgesellschaftlichen Organisationen bevorzugt wird.
Obwohl im Jahr 1981 ganz offiziell die Serienreife erreicht wird, erfolgt im Juli der vollständige Abbau der Versuchsanlage und das Konzept verschwindet in der Versenkung. Seitens der Verantwortlichen wird die Wirtschaftskrise 1980 dafür verantwortlich gemacht - sowie das äußerst komplizierte Genehmigungsverfahren in Verbindung mit wirtschaftlich nicht umsetzbaren Sicherheitsauflagen beim Bremsweg. Dabei haben zu diesem Zeitpunkt schon Städte wie West-Berlin, Freiburg im Breisgau und Marl in Nordrhein-Westfalen Interesse am Einsatz des Systems bekundet. Ein wenig mitschuldig am dem Mißerfolg ist vielleicht auch das völlige Fehlen jeglichen Designs – die eckigen Kabinen, denen es auch an Kopffreiheit fehlt, sehen aus wie lieblos zusammengezimmerte Seifenkisten. Hätte man dagegen den Designer Luigi Colani rangelassen, beispielsweise, dann hätte das neue Konzept zumindest ästhetisch für wesentlich mehr Aufmerksamkeit gesorgt. 1985 übernimmt die US-Firma Cabintaxi Corp. die Technologie, ohne daß dem aber weitere Entwicklungen folgen.

Auch das Folgekonzept unter dem Namen Cabinenlift, von dem im März 1975 eine Erprobungsanlage für den Transport von Patienten im Kreiskrankenhaus Bremen-Ziegenhain in Betrieb genommen wird, zeichnet sich durch eine ähnlich phantasielose Formgebung aus. Der Horizontallift, der das Hauptgebäude mit einem entfernt gelegenen Nebengebäude, getrennt durch einen Wald, verbindet, besitzt zwei Stationen, neunzehn Stützen eine 570 m lange Fahrstrecke. Auf der Strecke verkehrt eine Kabine ohne Zwischenstopp, die maximal 12 Personen, aber auch Patienten in Krankenhausbetten befördern kann. Die Fahrgeschwindigkeit liegt zwischen 20 km/h und 30 km/h, und eine einfache Fahrt dauert ca. zwei Minuten.
Im Jahr 2002 wird der Cabinenlift außer Dienst gestellt und im Laufe der Folgejahre erfolgen die Demontage und der Rückbau. Warum, konnte ich bislang nicht herausfinden.
Ein äußerlich sehr ähnliches Kabinentaxi wird von der Rohr
Industries Inc. aus Chula Vista, Kalifornien, einem Unternehmen
der Luft- und Raumfahrtindustrie, unter dem Namen Monocab entwickelt.
Die Firma, die auch von Bertins Aérotrain beeindruckt ist und sich
von ihm den Linearinduktionsmotor (LIM) lizenzieren läßt (s.u.), arbeitet
auch noch an zwei weiteren Transportsystemen, dem BART und
dem Flxible, von denen später aber nur das erste überleben
sollte, während der Flxible Bus daran litt, daß sein Hydrauliksystem
Feuer fing und die Passagiere in der Falle saßen, weil der hintere
Notausgang auch hydraulisch kontrolliert wurde. Hinter der Abkürzung
BART wiederum steht die technisch konventionelle Bay Area Rapid Transit
S-Bahn, die in der San Francisco Bay Area im Einsatz ist und deren
Wagen der Serien A und B zwischen 1968 und 1971 von
Rohr hergestellt werden.
Das Monocab-Design, ein 6-sitziger Wagen, der an einer Schiene hängt, ist dagegen eines der frühesten PRT-Systeme und stammt ursprünglich von Edward O. Haltom aus Dallas im Jahr 1953, der sie in den 1960er Jahren an die Varo Inc. aus Garland, Texas, verkauft. Diese entwickelt ein neues Weichensystem ohne bewegliche Teile und beginnt an ihrem Firmensitz mit der Entwicklung einer Teststrecke, die im Jahr 1969 eröffnet wird. Allerdings lassen die Monocabs ihre Fahrgäste häufig an den ziemlich engen und erhöhten Kurven der Strecke stranden. Dazu machen die Weichen große Schwierigkeiten.
Immerhin erfolgt die Teststreckeneröffnung nur ein Jahr nach Erscheinen der sehr einflußreichen HUD Reports, einer Reihe von Nahverkehrsstudien, welche PRT-Konzepte mit kleinen Fahrzeugen unterstützten, die in ausgedehnten Netzwerken automatisch von Punkt-zu-Punkt zu reisen. Die von dem Urban Mass Transportation Administration (UMTA) finanzierten Berichte lösen bei Dutzenden von Unternehmen auf der ganzen Welt PRT-Entwicklungsprojekte aus, darunter auch bei der RohrIndustries, die 1970 den UMTA-Auftrag für ein Tracked Air-Cushion Vehicle (TACV) bekommt (s.u. Spurgeführte Luftkissenbahn).

Im Jahr 1971 kauft Rohr das Monocab-System von Varo, ist mit dem ursprünglichen Design aber nicht zufrieden und verpaßt dem Ganzen eine gute Portion ‚space age’ sowie einen neunen Namen: ROMAG. Im kalifornischen Chula Vista wird eine entsprechende Teststrecke errichtet. Das fortschrittliche System verwendet die gleiche grundlegende Konzeption, ersetzt die Räder aber durch eine Magnetschwebebahn-Technologie – und den herkömmlichen Elektromotor durch einen Linearinduktionsmotor. Diese Veränderungen beseitigen die meisten beweglichen Teile des Fahrzeugs und bieten damit eine signifikant erhöhte Zuverlässigkeit und einen reduzierten Wartungsaufwand. (Mehr darüber unter Magnetschwebebahn).
Eine 1973 für Las Vegas geplante Installation wird aufgrund des Einbruchs auf den Aktienmärkten um 50 % im Jahr 1974 gestrichen. Etwa um 1977 herum werden die Rohr-Ingenieure von der Urban Transportation Development Corporation Ltd. (UTDC) aus Ontario, Kanada, um Entwürfe für ein S-Bahn-System gebeten. Hier ist das Ergebnis nach mehr als zwei Jahren der ICTS Zug, der einen Linearmotor verwendet, ansonsten aber konventionell mit Stahlrädern auf Stahlschienen fährt. Da es die Manager von Rohr aber unterlassen haben, mit der UTDC einen Vertrag zu unterzeichnen, wird die Firma ausgebootet und die UTDC, die alle Pläne hat die sie braucht, führt das Projekt alleine durch.
Als 1980 der ICTS Prototyp vorgestellt wird, wird Rohr Industries mit keinem einzigen Wort mehr erwähnt. Rohr verkauft die Patente derweil an Boeing, wo man das System im Rahmen des UMTA-Programms Advanced Group Rapid Transit (AGRT) bis Mitte der 1980er Jahre weiterentwicklt.
Das britische Cabtrack-Projekt
regt die Leitung der Verkehrsbetriebe in Göteborg, Schweden,
dazu an, nach Alternativen für den U-Bahn-Bau zu suchen, der hier mit
sehr hohen Kosten verbunden ist, da der Untergrund der Stadt zumeist
aus solidem Fels besteht. Es wird eine Studie über die Implementierung
eines PRT-System durchgeführt, doch nach anfänglicher Begeisterung
und anschließender Bewertung der internationalen Projekte auf diesem
Gebiet wird den Behörden im März 1973 klar,
daß keines der Systeme weit genug fortgeschritten ist, um in den Einsatz
gehen zu können. Statt dessen entscheidet man sich, das Straßenbahn-Netz
zu erweitern und die Entwicklungen der neuen Technologien vorerst nur
weiter zu beobachten. 1994 wird auch eine PRT-Studie
für die Kleinstadt Gävle durchgeführt, eine Umsetzung erfolgt jedoch
auch in diesem Fall nicht.
Ähnliches ist aus Kanada zu vermelden, wo das Verkehrsministerium
schon 1967 eine vergleichende Studie der Firma Norman
D. Lea and Associates aus Toronto finanziert, um alternative Transportmethoden
für kanadische Städte zu finden. Statt PRT verwendet die Studie den
Begriff ‚programmierte Bausteine’ (Programmed
Modules), um die Einsatzfähigkeit des Systems für sowohl den Personen-
als auch den Frachttransport zu betonen. Die Untersuchungen zeigen,
daß etwa die Hälfte der Einnahmen aus einem programmierten Modul-System
durch Frachtverkehr erzielt werden können. Angedacht wird ein automatisiertes
Netzwerk für Vancouver.
Etwa 1973 wird in der Provinz Ontario die Urban Transportation Development Corp. gegründet, um ein eigenständiges PRT-System zu entwickeln. Da die Protagonisten konventioneller Eisenbahnsysteme zu viel Einfluß auf das Projekt haben, verwandelt sich das Ganze in 40-Personen-Züge mit Stahl-Rädern auf Stahl-Schienen, die – als einzige Innovation – von Linearmotoren angetrieben werden. Die Fahrspur für so große Fahrzeuge ist groß genug und teuer genug, um die Marktchancen äußerst gering zu halten.
Weiter mit den Podcars und People Movern...