Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2019 (D)
In einem im Januar 2019 erscheinenden Bericht werden
diverse Drohnen vorgestellt, die komplett oder teilweise mittels 3D-Druck hergestellt
werden. Einige davon, wie der AirDog der Helico Aerospace
Industries (2014),
die Iris+ von 3D Robotics (2015),
die sehr kleine Piccolissimo-Drohne der University of
Pittsburgh (2016)
oder die Auxdron Lifeguard von General Drones (2018)
sind schon vorgestellt worden (s.d.).

dem 3D-Druck
Unter den anderen Drohnen sind besonders jene erwähnenswert, die aus der Zusammenarbeitet von 3D Robotik und My Mini Factory entstanden sind, weil es sich dabei um DIY-Projekte handelt. Um die Drohne fliegen zu lassen, muß der Benutzer lediglich die elektronischen Komponenten kaufen, während die für den 3D-Druck erforderlichen Informationen zum Herunterladen und Drucken frei zur Verfügung stehen.
Der Hauptzweck bei der Entwicklung dieses Projekts ist es, die Benutzer zu ermutigen, Innovationen und Verbesserungen für jede der Drohnen, an denen das Unternehmen beteiligt ist, zu entwickeln.
Die Kamera-Drohne Dark Matter der 2014 von Peter Opdam gegründeten britischen Firma Clogworks Technologies Ltd. in Holmfirth, West Yorkshire, basiert wiederum auf einem Modularitätskonzept, das Flexibilität und Wartungsfreundlichkeit ermöglicht, ohne die Leistung der Drohne zu verringern. Die Drohne verfügt über vollständig abnehmbare Arme, Beine und ein Schnellspannsystem für die Nutzlast. Die Firma arbeitet mit hauseigenem Rapid Prototyping und entwirft ihre Objekte unter Verwendung von Kohlefaser, CNC-Bearbeitung und 3D-Druck, um die benötigten Teile herzustellen.

Die erste vollständig modulare und einfach zu bedienende Drohne, die komplett in 3D gedruckt wird, um in industriellen Umgebungen für vielseitige Aufgaben verwendet zu werden, ist die Tundra-Drohne der seit 2014 bestehenden französischen Firma Hexadrone, die in Zusammenarbeit mit Raphael Cheze entwickelt wurde.
Die Industriedrohne besitzt leicht abnehmbaren Arme und drei Schnellverschlüsse, was sie sehr flexibel macht. Zudem ist sie dank eines robusten und wasserdichten Designs für extreme Wetterbedingungen ausgelegt. Sie wird Anfang 2018 mit dem Red Dot Award ausgezeichnet.

XL-RCM 10.0 PIXXY
Die XL-RCM 10.0 PIXXY von Supermoto XL ist wiederum eine 3D-gedruckte Miniaturdrohne, die zum Zeitpunkt ihrer Veröffentlichung im Jahr 2014 das kleinste gedruckte UAV war, das jemals für den öffentlichen/zivilen Gebrauch hergestellt wurde. Im Taschenformat und mit einem Gewicht von nur 40 g ist die solide Drohne sehr einfach zu bauen.
Die ausführlichen Anleitungen zum Drucken und Bauen dieser kleinen Drohne für den Innenbereich finden sich auf der Website von Supermoto XL.
Im vergangenen Jahr hat auch die US-Marine den DIY-Drohnen-Trend aufgegriffen und ihre eigene Version entwickelt: den Nibbler.

Dies ist zwar nicht das erste Mal, daß die Marine den 3D-Druck im Feld nutzt, denn sie hatte zuvor bereits eine 3D-Drohne erstellt, die im Kampf eingesetzt werden kann. Im Vergleich zu den anderen Drohnen, die von den Streitkräften eingesetzt wurden, ist der Nibbler eine kostengünstige und tragbare Lösung, die zudem besonders reparaturfreundlich ist.
Die 3D-Drohne, die zu einer Reihe von neuen 3D-Druckinitiativen des Militärs gehört, kann für verschiedene Aufgaben angepaßt werden, wie z.B. das Tragen von Munition, das Sammeln von Informationen oder die Durchführung von Überwachungsmissionen. In diesem Fall werden der 3D-Druck und die kommerzielle Standardtechnologie eingesetzt, um eine preiswerte Drohne für jeden Betriebsmodus zu entwickeln.

Ebenfalls aus dem Jahr 2014 stammen die Modelle Hovership MHQ und dessen Nachfolger MHQ2, die beide die gleichen faltbaren Arme und Beschläge verwenden, während das Redesign des Mini-Quadrokopters durch verbesserte Funktionalität, Haltbarkeit und Stabilität des Rahmens optimiert wurde. Die Spezifikationen und Anleitungen lassen sich zusammen mit der kostenlosen 3D-Druck-Datei von der Seite thingiverse.com herunterladen.
Ein letzte 3D-gedruckte Drohne, die hier vorgestellt werden soll, ist der Skeletone X-14 Quadcopter, ein persönliches, autonomes Flugobjekt, das sich leicht anpassen und gestalten läßt, obwohl es ein kompliziertes Design auf der Basis eines Netzes hat.
Dadurch ist es aber auch einfacher zu kontrollieren und zu navigieren, da es kleiner und leichter gebaut ist. Die kostenlosen Dateien zum Herunterladen lassen sich auf den Seiten cults3d.com und 3dzona.cz finden.
Anfang 2019 führen Experten der University of
the Highlands and Islands in Schottland unter der Leitung von
Prof. Andrew Rae den ersten erfolgreichen Testflug eines
kleinen Luftschiffs namens Phoenix durch, das ultralange
in der Luft bleiben kann und sich somit als Telekommunikations-Pseudosatellit
in Höhen von 20 km eignet. Bei dem Indoor-Test in einer großen Bootshalle
im britischen Portsmouth kann der gemeinsam mit verschiedenen anderen
Hochschulen sowie Unternehmen seit rund drei Jahren entwickelte Prototyp,
der aussieht aus wie ein Zeppelin mit Flügeln, mehrmals eine Distanz
von 120 m zurücklegen.

Die Phoenix – nicht zu verwechseln mit der von Aevex Aerospace in Zusammenarbeit mit der US Air Force entwickelten Kamikaze-Drohne Phoenix Ghost – funktioniert mit einem variablen Auftriebsantrieb und kann dadurch ohne Motor und damit ohne Treibstoff fliegen. Dies wird erreicht, indem das Luftschiff mal leichter ist als Luft und mal schwerer. Der wiederholte Wechsel zwischen diesen Zuständen ist dem zufolge die einzige Antriebsquelle.
Damit das 120 kg schwere und 15 m lange Luftschiff mit seiner Spannweite von 10,5 m aufsteigen kann, wird es mit Helium befüllt. Wenn das Schiff dann sinken, also beschwert werden soll, wird über Pumpen Luft in eine regulierbare Luftblase im Inneren eingesogen und komprimiert. Zum Ablassen der Druckluft gibt es eine Entlüftungs-Möglichkeit am hinteren Ende der Konstruktion. Durch dieses permanente ‚Ein- und Ausatmen‘ sowie den Auftrieb an den aus Kohlenstoff-Fasern hergestellten Flügeln schwebt sie Phoenix nicht nur auf und ab, sondern auch vorwärts – in sinusförmigen Wellen.
Die Energie, die für den Antrieb der Pumpen und die Ventile benötigt wird, stellt eine Batterie bereit, die von leichten und flexiblen Solarzellen an den Flügeln sowie am Heck aufgeladen wird. Weil man aber keine Propeller und keine Motoren braucht, ist das Konzept mechanisch und elektrisch simpler als bei anderen Fluggeräten. Gelenkt wird das Luftschiff über ein autonomes Flugsteuerungssystem.
Leider verschwindet auch dieses interessante Projekt, das vom britischen Aerospace Technology Institute (ATI) und Innovate UK gefördert wird, später wieder in der Versenkung.
Im Februar 2019 startet die 2015 gegründete
chinesische Firma EEGSmart Technology Co. Ltd. aus Shenzhen
eine Kickstarter-Kampagne, um ihre UDrone auf den Markt
zu bringen – als ersten kommerziellen Quadrokopter, der sich nicht nur
mit dem Smartphone steuern läßt, sondern auch vollständig ohne die Hände
zu benutzen: Das zugehörige UMind Lite Headset ermöglicht
es als Gehirn-Maschine-Schnittstelle (Brain-Machine Interface, BMI) das
Flugobjekt nämlich mittels Gedankensteuerung durch die
Luft zu manövrieren.

Zur Erinnerung: Es gab bereits im Jahr 2013 einen Bericht über Versuche an der University of Minnesota, bei denen es gelungen ist, einen Parrot-Quadrokopter mit Hilfe von Hirnströmen über ein Hirn/Computer-Interface zu steuern. Im Zuge der damaligen Recherche stieß ich auf ähnliche Arbeiten an der University of Illinois in Urbana-Champaign im Jahr 2010, sowie an der Zhejiang University im Jahr 2012, die alle in der Übersicht von 2013 aufgeführt sind (s.d.).
Im April 2016 meldeten die Blogs zudem, daß auch Forscher der University of Florida an einer entsprechenden Gehirn-Computer-Schnittstelle (Brain-Computer Interface, BCI) arbeiten. Große Popularität erlangt die Entwicklung durch das damals veranstaltete, weltweit erste Brain Drone Race am Florida Gymnasium (FLG), bei dem die Teilnehmer auf einen PC-Bildschirm blicken und ein dort abgebildetes Objekt durch ihre Gedankenbefehle nach vorn bewegen.
Ist ihre Konzentration ,sauber’, bewegt sich auch die entsprechend gekoppelte Drohne in der gewünschten Richtung. Bei dem gedankengesteuerten Drohnen-Rennen gewinnt daher diejenige Person, die sich am besten konzentrieren kann. Der Bericht darüber findet sich in dem entsprechenden Kapitelteil.
Um im Kontext zu bleiben, sollen hier auch die weiteren Entwicklungen
aufgeführt werden, die im Zuge der aktuellen Recherche aufzufinden waren.
So sucht das US-Verteidigungsministerium, das die Neigung hat, Drohnen zu benutzen um im Nahen und Mittleren Osten Menschen aus weiten Entfernungen zu töten, schon länger nach militärisch nutzbaren Gehirnkontrollanwendungen. Das Unmanned Systems Laboratory an der University of Texas, San Antonio (UTSA), erhält im Jahr 2014 einen Zuschuß, da hier ein System entwickelt wird, das es einem Einzelnen ermöglicht, ohne vorheriges Training gleichzeitig mehrere Drohnen durch Gedankenkontrolle zu fliegen.
Anstatt daß der Pilot bestimmte Gedanken denken muß, um die Drohnen zu bewegen, schaut er bei dem UTSA-System, das von Wissenschaftlern um Yufei Huang entwickelt wird, auf einen Bildschirm mit flackernden Signalen, welche eine Hirnaktivität auslösen, die wiederum in bestimmte Bewegungen übersetzt wird. Damit sollen sich viel mehr Befehle unterbringen lassen, als es die imaginäre Bewegung kann.

bei Tekever
Im Februar 2015 berichten die Fachblogs, daß auch das
Projekt Brainflight erfolgreich einen Drohnenflug demonstrieren
konnte, der durch menschliches Denken gesteuert wurde. Das EU-geförderte
Projekt wird von Ricardo Mendes und seinem portugiesischen
Technologieunternehmen Tekever geleitet und umfaßt als
teilnehmende Organisationen die Champalimaud Foundation (Portugal),
die Firma Eaglescience Software (Niederlande) und
die Technische Universität München (Deutschland).
Auch hier wird eine EEG-Kappe verwendet, deren Elektroden die Gehirnwellen auslesen. Spezielle Algorithmen übersetzen diese Gehirnwellen dann in Kontrollbefehle für die Drohne. Nach einer Periode des Gehirntrainings werden die Piloten angewiesen, sich darauf zu konzentrieren, einen kleinen Kreis auf einem Bildschirm auf und ab zu bewegen, der die Drohne anweist, sich nach links und rechts zu bewegen. Das Team testet das System zuerst in Verbindung mit Flugsimulatoren sowohl für bemannte, als auch unbemannte Luftfahrzeuge, anschließend werden Live-Flugtests mit einem UAV durchgeführt.
Aus der TU München hatten die beteiligten Wissenschaftler um Prof. Florian Holzapfel und den Luft- und Raumfahrtingenieur Tim Fricke schon im Mai 2014 berichtet, daß hirngesteuertes Fliegen sogar mit überraschender Präzision möglich sei.
Dort hatten sieben Versuchspersonen an den Tests am Flugsimulator des Lehrstuhls für Flugsystemdynamik teilgenommen, die über unterschiedliche Vorkenntnisse verfügten, ein Teilnehmer hatte zuvor noch gar keine praktische Erfahrung im Cockpit gemacht. Trotzdem hätte die Genauigkeit, mit der die Versuchspersonen allein durch gedachte Kommandos den Kurs halten konnten, teilweise auch den Anforderungen einer Flugschein-Prüfung genügt.

an der TU München
Zur Erkennung der Steuersignale, die im Gehirn der Piloten erzeugt werden, wird mit der TU Berlin zusammengearbeitet, wo ein Algorithmus entwickelt wurde, die die EEG-Signale entschlüsseln und in Steuerungsbefehle umzuwandeln kann. Die Forscher suchen nun nach Wegen, dem Piloten eine Rückmeldung zu geben, wenn er zum Beispiel das Flugzeug zu stark beansprucht. Normalerweise spürt er Widerstände bei der Steuerung und muß manchmal große Kraft aufwenden. Dieses Feedback fällt beim hirngesteuerten Fliegen weg.
Das Team ist durch den Erfolg der Technik jedenfalls so begeistert, daß es hofft, sie eines Tages sogar nutzen zu können, um reguläre Flugzeuge zu kontrollieren. Weitere mögliche Anwendungen beinhalten neue Möglichkeiten für behinderte Menschen, mit ihren Umgebungen zu interagieren und Fahrzeuge wie Autos, Boote und Züge zu kontrollieren.
Daß dies tatsächlich möglich ist, beweisen Forscher der Nankai
University in Tianjin, China, die im Februar 2016 einen
Bericht nebst Videoaufnahmen veröffentlichen, in denen ein Auto zu sehen
ist, das von den Hirnsignalen des Fahrers gesteuert wird. Das Team unter
der Leitung von Duan Feng hat zwei Jahre in die Entwicklung
investiert. In ihrem jüngsten Test trägt ein Wissenschaftler eine EEG-Kappe
mit 16 Elektroden und kontrolliert das Auto erfolgreich vom Rücksitz
aus, indem die Signale drahtlos an einen Computer gesendet werden, auf
dem das von den Forschern entwickelte Softwareprogramm läuft.
Ohne daß die Person irgendwelche Glieder benutzt, fährt der Wagen vorwärts, rückwärts und wird zum Stillstand gebracht. Ebenso kann das Auto auch verschlossen bzw. wieder entsperrt werden. Eine intensive Konzentration ist dabei nur erforderlich, um den Fahrzustand des Wagens zu ändern, wie das Drehen oder das Wechseln der Fahrspur. Die Forschung wird gemeinsam mit dem Automobil-Unternehmen Great Wall Motor Co. Ltd. durchgeführt, Chinas größtem Produzent von SUVs.
Im April 2016 folgt ein Bericht der Arizona
State University (ASU), wo ein Team um Prof. Panagiotis
Artemiadis eine Technologie entwickelt, die es einem Luftwaffenpiloten
erlauben würde, eine ganze Flotte von Drohnen zu kontrollieren, indem
er seinen Geist benutzt. Das Labor hatte im Jahr 2014 von
der DARPA und der U.S. Air Force Zuschüsse von insgesamt 860.000 $ erhalten,
um die Hirn-Steuertechnologie zu bauen.
Die hier eingesetzte EEG-Kappe besitzt 128 Elektroden, die übersetzten Befehle werden den Robotern über Bluetooth mitgeteilt. Ein Pilot kann eine Gruppe von fliegenden Drohnen oder terrestrischen Fahrzeugen anweisen, sich in eine bestimmte Richtung zu bewegen, über einen größeren Bereich zu verteilen oder um ein bestimmtes Ziel zu kreisen. Bisher gelang es Artemiadis zufolge, im Labor vier Drohnen auf einmal zu kontrollieren, doch das Projekt soll bald in eine größere Anlage umziehen, wo die Forscher hoffen, diese Zahl auf 20 und schließlich in die Hunderte zu erhöhen.

Was die eingangs erwähnte kleine UDrone der EEGSmart
anbelangt, so muß das UMind Lite Headset so hinter die Ohren geklemmt
werden, daß die vordere Strebe mit ihren Elektroenzephalographie-Sensoren
an der Stirn entlang läuft. Das Headset mißt dabei eine ganze Reihe an
Daten, angefangen mit der elektrischen Aktivität innerhalb des Gehirns
über die Bewegungen der Augen bis hin zu den Aktivitäten bestimmter Muskeln.
Um die Steuerung der Drohne zu übernehmen, muß das Headset mit einer Smartphone-App verbunden werden. Anschließend läßt sich die Drohne in den ‚Mind Control Mode‘ schalten, womit sich die Höhe des Fluges durch Fokussierung der Gedanken verändern läßt.
Über die Flugrichtung entscheiden hingegen Kopfbewegungen, was bei Kurven relativ simpel ist: Dreht man den Kopf nach links, fliegt auch die UDrone in diese Richtung. Und wird der Blick nach oben gerichtet, fliegt der Quadrokopter nach vorne. Durch zweimaliges Blinzeln läßt sich zudem die integrierte Kamera aktivieren, um Fotos oder Videos zu machen. Und gelandet wird, indem man die Zähne zusammenbeißt. Die Drohne arbeitet im Innen- oder Außenbereich und hat eine maximale Betriebszeit von 25 Minuten.
Bei der äußerst bescheidenen Kickstarter-Kampagne mit einem Finanzierungsziel von umgerechnet 4.750 € werden die Drohne und das Headset für rund 280 $ angeboten, was immerhin 22 Unterstützer motiviert, insgesamt 5.494 € zusammenzubringen. Trotzdem wird die Finanzierung für dieses Projekt ausgesetzt und aus dem Plan, die Bestellungen bereits im April auszuliefern, wird nichts. Dasselbe passiert mit einer parallel laufenden Kampagne auf Indiegogo. Weitere Informationen gibt es bislang nicht.

Hierzu passend ist ein Bericht vom Mai 2020 über einen
Versuchsaufbau am Massachusetts Institute of Technology (MIT),
der Muskelsignale zur Steuerung einer Drohne verwendet.
Das als Conduct-A-Bot bezeichnete System verwendet mehrere
Elektromyographie- und Bewegungssensoren, wobei letztere im Bizeps-,
Trizeps- und Unterarmbereich des rechten Arms des Benutzers getragen
werden. Im Zusammenspiel erkennen die Sensoren Muskelaktivität und Armbewegungen
und leiten diese Daten an einen fest verdrahteten Mikroprozessor weiter.
Auf maschinellem Lernen basierende Algorithmen des Teams um den Doktoranden Joseph DelPreto werden dann verwendet, um die verschiedenen Armaktionen zu identifizieren und sie in spezifische Befehl umzuwandeln, die wiederum drahtlos an einen Parrot Bebop 2 Quadrokopter übertragen werden, der entsprechend reagiert.
In der aktuellen Konfiguration stoppt die Versteifung des Oberarms die Drohne; das Ballen der Faust bewegt sie vorwärts; die Drehung der Faust im oder gegen den Uhrzeigersinn bewirkt eine Drehung; und das Schwenken der Hand nach oben, unten, links oder rechts bewegt sie seitwärts oder horizontal. In Tests, bei denen die Drohne durch Reifen fliegen soll, reagiert sie auf 82 % der über 1.500 Befehle korrekt, was sich mit der Weiterentwicklung des Systems aber noch verbessern dürfte.
Das neue, intuitive Steuerungssystem kommt der nahtlosen Zusammenarbeit mit Robotern einen Schritt näher, die im vorliegenden Fall für Anwendungen vorgesehen ist, wie der Steuerung von Hilfsrobotern durch ältere oder körperlich behinderte Menschen.
Im chronologischen Verlauf möchte ich an dieser Stelle auf die persönliche
Korrespondenz mit Klaus-Peter Kostag hinweisen, der
sich als Leser im März meldet, um mich auf ein neues Axiom hinzuweisen,
dessen Sonderfall z.B. der Magnus-Effekt ist, der beim Flettner-Rotor zum
tragen kommt, oder der Satz von Kutta-Joukowski, der die Proportionalität
des dynamischen Auftriebs zur Zirkulation beschreibt.
Da ich das Axiom des Dynamischen Auftriebs leider nicht verstehe, möchte ich es hier kommentarlos aufführen – in der Hoffnung, daß sich bei anderen der gewünschte Aha-Effekt einstellt: „Jedes zirkular umströmte Objekt erfährt in dazu seitlicher Anströmung eine Querkraft, genannt Auftrieb“. Kostag zufolge bildet dieser Ansatz eine technische Revolution bei der Generierung von jedwedem dynamischen Auftrieb, so daß es aufgrund der Zirkularströmung keiner speziellen Formen und Bewegungen, keiner Tragflächen, Segel oder Rotoren mehr bedarf.

Nachdem der französische Luftfahrtingenieur Edwin Van Ruymbeke vor
fünf Jahren seinen Bionic Bird vorgestellt und mittels
einer sehr erfolgreichen Crowdfunding-Kampagne auf Indiegogo finanziert
hat (siehe hier),
betritt er im März 2019 erneut die Bühne – mit dem von
Insekten inspirierten Flugroboter MetaFly.
Die biomimetische Kreatur hat eine Länge von 19 cm, ihr Gewicht beträgt 10 g und ihr Flügelschlag wird von einem speziell für dieses Projekt entwickelten Motor mit einem Aluminium-Kühlkörper ausgeführt, der wiederum von einem Lithium-Polymer-Akku angetrieben wird. Gesteuert wird die neuartige Drohne mit einer Zweikanal-Fernbedienung, die eine maximale Reichweite von 100 m hat. Mit vollen Akku läßt sie sich ungefähr 8 Minuten lang fliegen, mit bis zu 17 km/h.
Ihre hohe Beweglichkeit und Wendigkeit, die extreme Flugmanöver erlauben, verdankt sie dem geringen Gewicht der Flügel, die aus Kohlefaser, Flüssigkristallpolymer und ausgerichtetem Polypropylen bestehen. Obwohl die MetaFly für den Einsatz im Gelände sowie in Innenräumen konzipiert ist, ist durch die Flügelspanne von 29 cm ein sicheres manövrieren in kleinen Räumen etwas schwierig. Vorne und hinten sind zudem elastische Stoßdämpfer integriert. Mit Hilfe zwei unterschiedlichen Einstellungen des ebenfalls hochelastischen Schwanzes werden unterschiedliche Geschwindigkeiten möglich.
Im Zuge einer erfolgreichen Kickstarter-Kampagne, bei der das mechanische Fluginsekt für 79 € angeboten wird, kann der Erfinder satte 595.940 € einsammeln, worauf die weltweite Auslieferung im September erfolgen soll. Der spätere Verkaufspreis liegt bei 129 €.

Im Dezember 2023 folgen Berichte über ein neues Modell namens X-Fly, das wie eine Kreuzung zwischen einer Libelle und einem Rotkehlchen aussieht und über einen Kohlefaserrahmen sowie einen gefederten Kopf und Beine verfügt, die ihm helfen, unsanfte Landungen und Abstürze zu überstehen.
Zu den technischen Verbesserungen gehören eine größere Flügelspannweite für bessere Gleitleistung, ein verbesserter Schlagmechanismus, der es ermöglicht, sich sicher durch Innenräume zu bewegen, sowie gyroskopische und G-Kraft-Sensoren, die verhindern, daß der X-Fly ins Trudeln gerät, wenn er vom Benutzer übersteuert wird. Der 55 mAh Wechselakku reicht für eine Flugzeit von 8 - 12 Minuten, die Fluggeschwindigkeit reicht von 5 - 20 km/h.
Die Schlagflügeldrohne ist Gegenstand einer Kickstarter-Kampagne, bei der der X-Fly ab 75 € angeboten wird. Tatsächlich tragen 1.193 Unterstützer mit 136.741 € bei, um das Projekt zu verwirklichen. Die Auslieferung beginnt allerdings erst im November 2024.

(Grafik)
Zu den technischen Entwicklungen gehören auch Drohnen, die sich aus verschiedenen Elementen zusammensetzen lassen. Dazu gehört beispielsweise die Dash Drone (o. Journalist Drone) der persischstämmigen Industriedesignerin Sheida Amiri-Rigi aus dem schwedischen Lund, die im März 2019 in den Blogs vorgestellt wird, nachdem sie im vorherigen November auf der Global Grad Show 2018 während der Dubai Design Week gezeigt worden war.
Ihr Ansatz geht davon aus, daß sich kleinere Drohnen besser für den Einsatz in Innenräumen eignen, während im Freien größere Drohnen viel effizienter sind und auch bei schlechtem Wetter besser navigieren können. Mit den ‚Plug-and-Use‘-Modulen des bemerkenswerten Konzepts lassen sich so viele Motoren oder Kameramodule anordnen, wie benötigt.
Ja nach den spezifischen Anforderungen können komplexe Drohnen zusammenmontiert werden, die besser oder länger fliegen oder bestimmte Manöver ausführen können, um genau die gewünschte Kameraaufnahme zu erhalten. Mit verschiedenen Kameramodulen können unterwegs auch verschiedene Winkel erfaßt werden. Interessant ist auch die Idee, daß sich eine riesige Drohne bei Bedarf auflösen und in mehrere Richtungen zerstreuen kann.
Die Dash Drone erinnert damit ein wenig an die modulare und programmierbare Airblock Drohne, die sich seit 2016 im Verkauf befindet.

Eine Entwicklung, die in Zukunft möglicherweise in verschiedenen Hybrid-Fahrzeugen
zu finden sein wird, stellt die Firma Goodyear im
März auf dem Genfer Autosalon vor. Da fliegende Autos mindestens
Reifen zum Fahren und Propeller zum Fliegen benötigen, faß die Firma
mit ihrem Reifen-Konzept AERO beides zu einer Einheit
zusammen.
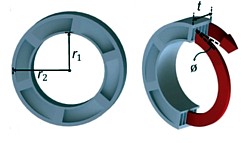
Der Prototyp verfügt über ein umlaufendes Gummiprofil für die Traktion, aber es fehlt eine pneumatische Luftkammer. Um Stöße zu absorbieren, besitzt er stattdessen integrierte, biegsame Speichen, die dennoch stark genug sind, um das Gewicht des Fahrzeugs zu tragen. Gleichzeitig bilden die Speichen funktionale Rotorblätter.
Solange sich das Auto auf der Straße bewegt, stehen alle vier AEROs senkrecht zum Asphalt. Ist es jedoch Zeit für einen Senkrechtstart ist, dann schwenken zwei der Reifen (an gegenüberliegenden Ecken des Fahrzeugs) aus, um parallel zur Straße zu sitzen. Die nun als Rotorblätter dienenden Speichen erzeugen genügend Auftrieb, um das Auto vom Boden abzuheben. Anschließend schwingen die anderen beiden Reifen ebenfalls aus, wodurch ein vollständiger Start im Quadrokopter-Stil ermöglicht wird. Nachdem das Fahrzeug in der Luft ist, neigen sich die Reifen nach vorne und werden zu Propellern für einen schnellen Vorwärtsflug.
Da die Reifen über lange Zeiträume sehr schnell rotieren müßten, würden sie ein reibungsfreies magnetisches Antriebssystem verwenden. Sie würden zudem faseroptische Sensoren zur Überwachung der Straßenverhältnisse, der Laufflächenabnutzung und der allgemeinen strukturellen Integrität enthalten. Die Daten dieser Sensoren sowie die Daten der Kommunikationssysteme Fahrzeug-Fahrzeug und Fahrzeug-Infrastruktur würden von einem AI-Prozessor analysiert werden, der seinerseits je nach den Umständen raten würde, ob das Fahrzeug gefahren oder geflogen werden sollte.
Eine besonders interessante Meldung in diesem März stammt aus der Boston
University, wo ein Forscherteam um Reza Ghaffarivardavagh und Xin
Zhang eine Lösung gefunden hat, wie sich Geräte, die Luft bewegen,
für das menschliche Ohr angenehmer – sprich leiser – machen lassen. Und
dies, ohne die tatsächliche Luftbewegung zu behindern, was die meisten
bisherigen Ansätze zur Schallblockierung bei Produkten
wie Kühlventilatoren oder Drohnen unpraktisch machte. Der Bericht ‚Ultra-open
acoustic metamaterial silencer based on Fano-like interference‘ war im
Januar veröffentlicht worden.

der Boston University
Bewegte Luft erzeugt Lärm, und der effektivste Weg, das störende Geräusch zu blockieren, ist eine Barriere zu errichten – je dicker, desto besser. Als Alternative für diesen bei Drohnen kaum umsetzbaren Ansatz entwickeln die Wissenschaftler ein neues akustisches Metamaterial, das störende Geräusche schon an ihrer Quelle zum Schweigen bringt. Ausgehend von Computersimulationen konstruieren sie ein Material mit einer 3D-Struktur, das die Vibrationen und Turbulenzen der Luft, die den Lärm erzeugen, zurück zu ihrer Quelle reflektiert.
Dabei verschwinden die Geräusche nicht auf magische Weise, doch durch eine strategische Installation und Positionierung des Metamaterials können sie von den menschlichen Ohren weggerichtet werden – und niemand beschwert sich über Geräusche, die er nicht hört.
(Grafik)
Der erste Prototyp wird konstruiert, um Töne, die durch ein PVC-Rohr vor einem dröhnenden Lautsprecher wandern, stumm zu schalten. Der entsprechende 3D-gedruckte ‚Schalldämpfer‘, der zu einer 94 %-igen Verringerung hoher Töne führt, sieht daher wie ein Kunststoff-Donut mit einem Loch in der Mitte aus, durch das die Luft ungehindert hindurchströmen kann, während sie von einem besonderen 3D-Spiralmuster umgeben ist, das verhindert, daß auch Töne hindurchgehen.
Wie die Abbildung zeigt, weist die äußere Region sechs in Form einer Spirale gewundene Kanäle auf, wobei der Schnitt eine akustische Welle abbildet, die sich durch die Kanäle ausbreitet und im Wesentlichen dem schraubenförmigen Weg folgt.
Über die vielversprechenden Ergebnisse des ersten Prototyps hinaus, arbeitet das Team daran, das Metamaterial zu verfeinern und zu perfektionieren um dessen Fähigkeit zur Schallblockierung weiter zu verbessern. Dabei muß das Material nicht zwingend in der runden Form hergestellt werden, sondern kann genauso gut die Form eines Würfel oder Sechsecks haben, so daß sich leicht schalldämmende Wände daraus montieren lassen. Ein Ring wäre allerdings besonders nützlich, um einen Computerlüfter oder hochfrequente Drohnenpropeller zum Schweigen zu bringen.

mit Drohne
Die Case Western Reserve University (CWRU) meldet im
gleichen Monat, daß ein Team um Prof. Vikas Prakash über
einen Zeitraum von drei Jahren ein Energiespeichersystem entwickelt hat,
bei dem Batteriezellen direkt in die Flügel einer Starrflügeldrohne eingebaut
sind, was dabei helfen soll, die Flugzeit zu verlängern.
Batterien, die in die Struktur von Gegenständen integriert sind, sind bereits von Autos oder Satelliten bekannt, wo sie die Laufzeiten verlängern, ohne die Masse zu vergrößern. Bei dem autonomen, 2,1 m langen Ein-Popeller-Flugzeug mit einer Spannweite von 1,8 m kann die Flugzeit dank der Strukturbatterien fast verdoppelt werden. Bei früheren Tests mit einem normalen Flügel und dem Standard-Batteriepack konnte das Flugzeug maximal 91 Minuten lang fliegen. Bei Tests Ende Februar mit dem eingewechselten Batterieflügel kann es hingegen 171 Minuten lang in der Luft bleiben.
Für die Entwicklung von Elektro-Regionalflugzeugen und konkret für das Projekt das offiziell als ‚Hi-Performance Multifunctional Structural Energy Storage‘ bekannt ist, hatte Prakash im Oktober 2017 von der NASA eine auf zwei Jahre angelegte und mit 450.000 $ dotierte Förderung erhalten. Leider ließ sich den Quellen nichts über die technischen Spezifikation der eingesetzten Batterien entnehmen - gleichwohl ich davon ausgehe, daß es sich in beiden Bauformen um indentische Zellen gehandelt hat.
Da Starrflügeldrohnen schneller und energieeffizienter als Multikopter
sind, werden sie häufig für Aufgaben wie die Kartierung von Meeresgebieten
eingesetzt. Viele von ihnen benötigen jedoch Landebahnen, für die auf
Schiffsdecks auf Meeresplattformen nicht immer Platz ist. Und wenn
das Wetter schlecht ist, ist die Landung auf Schiffen noch weitaus
schwieriger.

der NTNU
Ein von einem Team der Technisch-Naturwissenschaftlichen Universität Norwegens (NTNU) um Prof. Tor Arne Johansen entwickeltes Leinenfangsystem löst dieses Problem mit einer neuen Multi-Drohnen-Technik.
Diese erfordert, daß die Starrflügeldrohnen an der Unterseite mit einem kleinen Kasten ausgestattet sind. Sobald sich eine dieser Drohnen auf See ihrem Gastschiff nähert, öffnet sich dieser Kasten, und eine Fangleine mit einem Haken am Ende fällt heraus und hängt herunter. Zur gleichen Zeit starten zwei autonome Multikopter von dem Schiff und schweben Seite an Seite knapp unter der Bahn der einfliegenden Drohne, wobei sich zwischen ihnen ein horizontales Kabel spannt.
Wenn sich die Fangleine der Drohne diesem Kabel nähert, beginnen die Kopter in die gleiche Richtung wie die Drohne zu fliegen. Dies führt dazu, daß sich die Fangleine am Kabel verhakt, aber nicht zu abrupt. Die Drohne schaltet daraufhin ihren Motor ab, verliert an Geschwindigkeit und hängt schließlich am Fangseil. Anschließend wird sie von den Multikoptern, die dann ebenfalls wieder auf dem Schiff landen, sanft auf das Deck abgesenkt.
Wenn die Drohne nicht erfolgreich vom Fangseil erfaßt wird, ist sie so programmiert, daß sie dreht und es erneut versucht, ohne daß jemand die Fernsteuerung übernehmen muß. Zudem ist die Fangmethode skalierbar. Wenn die Drohne groß ist und mit hoher Geschwindigkeit fliegt, muß nur ein stärkeres Kabel verwendet und sichergestellt werden, daß die Multikopter schnell genug in dieselbe Richtung fliegen können.
Auch diese Linecatcher-Technologie wird im März vorgestellt, während Videos über die im Vorjahres erfolgten Versuche auf See und an Land im Februar und Mai veröffentlicht werden. Das Projekt wird vom norwegischen Forschungsrat und vom EU-Programm Horizont 2020 unterstützt. Das norwegische Unternehmen Maritime Robotics ist ein Partner des Projekts und hat bereits eine Vereinbarung zur Lizenzierung der Technologie unterzeichnet.
Hierzu passen die im Juli 2019 erschienen Berichte über
einen Solar-Ganzflügler namens CIES 2.2 SP der 2016 gegründeten
und in Nigrán beheimateten spanischen Firma UAV Instruments S.L,
der für Photogrammetrie, Topographie, Fernerkundung, Vermessung oder
Präzisionslandwirtschaft einsetzbar ist.
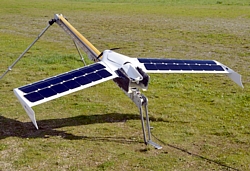
Zu den Besonderheiten dieses Fluggeräts gehören Katapultstart, autonomer Flug und automatische Fallschirmlandung. Die ‚Mindestautonomie‘ der 4 kg schweren Drohne mit einer Spannweite von 220 cm und einer Länge von 73 cm beträgt 120 Minuten, die sich durch 28 Hochleistungs-Solarzellen auf dem Flügel und entsprechender Sonneneinstrahlung um bis zu acht weiteren Stunden verlängert werden kann.
Die Firma Marine Instruments aus Pontevedra, die als
weltweit führend in der Entwicklung und Herstellung von Satellitenbojen
und Ortungsgeräten für die Fischereiindustrie bezeichnet wird, übernimmt
im Oktober 2017 eine Mehrheitsbeteiligung an dem Unternehmen.
Der Ganzflügler soll nun zur Unterstützung des Thunfischfangs dienen,
um den Hubschrauber auf Ringwadenfischerbooten zu ersetzen.
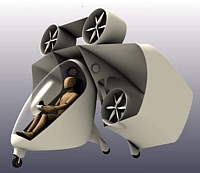
Eine Drohne, die aufgrund ihrer besonderen Form in dieser Übersicht aufgeführt werden soll, obwohl sie nicht elektrisch betrieben ist, ist das All-DIrectional Flying Object (ADIFO), das bei niedriger Geschwindigkeit Quadrokopter funktioniert, während es bei hoher Geschwindigkeit ein strahlgetriebenes, hocheffizientes Überschallflugzeug ist, dessen gesamter Körper als widerstandsarmer Flügel fungiert. So lauten zumindest die Behauptungen der rumänischen Erfinders Razvan Sabie dieser fliegenden Untertasse, die über einen breiten Geschwindigkeitsbereich eine beispiellose Wendigkeit in der Luft bieten soll.

Um das zum Patent angemeldete Konzept zu entwickeln, das im März in den Blogs gezeigt wird, arbeitet Sabie mit dem Aerodynamiker Iosif Taposu zusammen, dem ehemaligen Leiter der Abteilung für theoretischen Aerodynamik am Nationalen Luftfahrtinstitut (WO-Nr. 2017105266). Gemeinsam konstruieren sie zu Testzwecken einen funktionsfähigen, unbemannten und funkgesteuerten Prototypen des scheibenförmigen Flugzeugs, dessen gesamte Oberfläche ein Flügel ist, mit einem Durchmesser von 1,2 m.
VTOL- und Langsamflugmanöver werden mittels vier Strömungskanälen durchgeführt, so daß der ADIFO wie eine normale Quadrokopter-Drohne funktioniert. Es gibt zudem zwei Düsen auf der Rückseite (die beim Prototyp durch zusätzliche elektrische Gebläse ersetzt wurden), die für horizontalen Schub sorgen und die auch einzeln vektoriell arbeiten können, um im Horizontalflug ein hohes Maß an Wendigkeit zu erreichen. Bei hohen Geschwindigkeiten können kleine Scheiben austreten und die Quadrokopter-Gebläse abdecken, um ein noch glatteres Profil zu erzielen, und ebenso können die Beine einfahren.
Den abschließenden vortriebstechnischen Touch bildet ein Satz von zwei nach jeder Seite gerichteten seitlichen Schubdüsen, die wie die Triebwerke des Reaktionskontrollsystems eines Raumfahrzeugs funktionieren. Im Horizontalflug ermöglichen sie es dem ADIFO, sich schnell seitlich in die eine oder andere Richtung zu schieben oder sich während des Fluges extrem schnell zu drehen, und dies, ohne daß separate Flügel, Querruder, Seitenruder oder Klappen erforderlich sind.
Mit den richtigen Strahldüsen soll der Flugkörper extrem effizient sein, wenn er transsonisch und im Überschallbereich fliegt, wobei die Modellierungen des Teams darauf hindeuten, daß es dabei keinen traditionellen Überschallknall geben wird, was tatsächlich revolutionär wäre. Das Team plant langfristig jedenfalls ein ein- oder mehrsitziges bemanntes Flugzeug mit einem Hybrid-Elektro-/Düsenantriebssystem, wofür nun nach Partnern gesucht wird.
(Grafik)
Im September 2022 erscheint Sabie ein weiteres Mal in den Blogs, als er einen hecksitzenden eVTOL-Doppeldecker namens Mad Bat vorstellt, der eine außerordentlich schnelle und einfache Methode für den Wechsel zwischen vertikalem und horizontalem Flugmodus anwendet. Das etwas befremdlich wirkende Design sei von kleinen Drohnen über einsitzige Privatflugzeuge bis hin zu mehrsitzigen Lufttaxis skalierbar. Auch Modelle, die groß genug sind, um mit dem Auto hineinzufahren und dann abzuheben, sind denkbar.
Im Grunde funktioniert der Mad Bat wie ein stark modifizierter Tail-Sitter. Solche sieht man in der Welt der VTOLs nur selten, da diese zumeist als Passagiertransporter entwickelt werden, und davon auszugehen ist, daß Passagiere in der Regel in einem horizontalen Sitz sitzen wollen und nicht in einem, der gerade nach oben zeigt, wie in heutigen Raketen, oder auf dem Bauch liegend, wie im Zeva von 2018.
Der Mad Bat löst dieses Problem mit brillanter Einfachheit, indem die Kabine schwingend mit der umgebenden Antriebszelle verbunden ist, wobei sich das schwere Akkupack im Boden der Kabine befindet, um sie jederzeit mehr oder weniger aufrecht zu halten. Das Fluggerät hebt senkrecht ab und fängt dann an, vorwärts zu fliegen, und während die Kabine waagerecht bleibt, kippt das Antriebssystem immer weiter nach vorne, bis es vollständig horizontal ist.

Prototyp
Auf diese Weise entwickelt der Mad Bat schon sehr früh beim Übergang zum Vorwärtsflug Auftrieb von den Flügelflächen, und sobald diese vollständig waagerecht sind, verhält er sich wie ein Kasten-Doppeldecker. Dabei ist kein Antriebssystem erforderlich, um den Flügelwinkel zu verändern, sondern nur ein System, das die Drehung der Kabine dämpft und dafür sorgt, daß diese nicht vor und zurück schwingt.
Durch Fahrwerkssätze an den Unterkanten der Flügel und unter der Kabine kann der Mad Bat auch wie ein herkömmliches Flugzeug starten und landen, wenn eine Landebahn zur Verfügung steht. Im Falle eines totalen Systemausfalls wird eine Gleitschirmkappe ausfahren, die dem Piloten die Möglichkeit gibt, sanft zu Boden zu gehen.
In dem Patentantrag für das Design wird zudem die Absicht beschrieben, die Verkleidungen der Mantelpropeller zu nutzen, um den Coanda-Effekt auszunutzen und den Schub für den Start zu erhöhen. Das Patent beschreibt einen Luftkompressor, der von der Welle jedes Propellers angetrieben wird und eine komplex aussehende Reihe von Druckkammern, Kanälen und Ausstoßschlitzen speist, die durch die Vorderkanten der Kanäle und den Flügel hinter dem Propeller verlaufen, an dem ein kleines, sekundäres Tragflächenprofil angebracht ist (RO-Nr. 133664).
Sabie hat bereits einen Prototyp gebaut, der etwas größer als eine Milchkiste ist, und ihn erfolgreich im Schwebe- und Übergangsmodus geflogen.
An dieser Stelle sei auch auf eine weitere ungewöhnliche Brennstoff-betriebene
Drohne hingewiesen, die im November 2019 in der Presse
erscheint. Die AB5 JetQuad des in Dallas, Texas, ansässigen
und 2016 von Alexander Taits gegründeten
Unternehmens FusionFlight, die als ‚Quadrokopter
auf Steroiden‘ beschrieben wird, ist dem Unternehmen zufolge die kleinste
und leistungsstärkste strahlgetriebene Drohne der Welt mit vertikalen
Start- und Landefähigkeiten.

Anstelle der üblichen vier Elektromotoren und Propeller verfügt der aktuelle Prototyp über vier dieselgetriebene Mikroturbinen-Düsentriebwerke, die bei Vollgas zusammen 200 PS leisten. Dank eines besonderen Schubvektorsystems, das als H-Konfiguration bekannt ist, kann der Schub dieser Triebwerke so gerichtet werden, daß sich die Drohne entweder bei Start und Landung vertikal oder während des Fluges horizontal bewegt.
Eine bislang nur angedachte Serienversion des Fluggeräts soll eine Höchstgeschwindigkeit von über 483 km/h erreichen, wobei eine Füllung des 19 Liter Treibstofftanks einen 30 Minuten langen Schwebeflug oder einen 15 Minuten langen Reiseflug erlaubt. Durch den Einbau von Komponenten wie Nachbrennern könnte die Geschwindigkeit allerdings noch erheblich gesteigert werden.
Die Drohne wiegt 23 kg, mit einem vollen Treibstofftank kommen noch einmal 18 kg dazu. Dafür soll sie eine maximale Nutzlast von 18 kg tragen, die entweder an der Drohne selbst befestigt ist oder an einem Seil darunter hängt, ohne von den Triebwerken beschädigt zu werden, da der Schub nie direkt unter die AB5 geleitet wird. Der aktuelle Prototyp mißt 1,2 x 1,2 x 0,6 m und hat eine Höchstgeschwindigkeit von 402 km/h.
Die AB5 soll im Sommer 2021 auf dem Markt kommen, wobei der Preis je nach Modell zwischen 200.000 und 250.000 $ liegen wird. Varianten mit größeren Triebwerken und verbesserter Aerodynamik werden später folgen.

(Grafik)
Wer sich für weitere Jet-betriebene Drohnen interessiert, sollte sich
auch die 2015 gegründete Firma Jetoptera Inc. aus
Edmonds, Washington, ansehen, deren Drohnen eine integrierte Flugzeugzelle
sowie ein neues Antriebssystem besitzen, das ideal für VTOL-Fluggeräte
ist. Grundlage ist die patentierte Jetoptera-Gasturbine namens Fluidic
Propulsive System des Luft- und Raumfahrtingenieurs Andrei
Evulet (US-Nr. 10.501.197, beantragt 2016,
erteilt 2019).
Das erste Produkt der Firma, die J55 Drohne, ein UAV unter 25 kg, absolviert im Januar 2018 ihren Jungfernflug. Dieses Modell ist in der Lage, sowohl VTOL als auch mit Reisegeschwindigkeiten von über 320 km/h zu fliegen. Eine Ausführung mit dem Fluidic Propulsion System geht erstmals im April in die Luft, und im Mai werden Grafiken des geplanten Flugautos J2000 veröffentlicht. Im September folgt die Bekanntgabe einer Zusammenarbeit mit der Firma GE Aviation.
Im Mai 2019 beginnen Tests mit einer Version des J-2000 im Maßstab 1:4, die von elektrischen Mantel-Gebläsen angetrieben wird. Dabei können auch der Übergang vom Senkrechtstart zum Vorwärtsflug sowie der Hochgeschwindigkeitsflug bis 144 km/h demonstriert werden. Im Juli folgt eine völlig autonome VTOL-Frachtlieferung.
Ebenfalls im März berichten Ingenieure der Purdue University und
der ETH Zürich um Prof. Andres Arrieta,
daß sie von Spinnenhaaren inspirierte Sensoren entwickelt haben, die
in autonomen Autos oder Drohnen eingesetzt werden könnten, damit diese
Hindernisse besser erkennen und ihnen ausweichen können. Die heute eingesetzten
Sensoren verarbeiten die Datenflut, die auf sie einströmt, nämlich nicht
in Echtzeit – was die Natur hingegen kann.
Bei Spinnen, Fledermäusen, Vögeln und anderen Tieren landen die Sinneseindrücke in sogenannten Mechanorezeptoren, also Sinneszellen, die mechanische Kräfte in Nervenerregung umwandeln. Sie sind in so verschiedenen Sinnesorganen wie den Ohren, der Haut und den Arterien zu finden. Diese Rezeptoren nehmen nur Reize wahr, die für das Überleben des jeweiligen Tieres wichtig sind. Viele biologische Mechanorezeptoren filtern Daten, die sie aus der Umwelt empfangen, mit Hilfe von Grenzwerten, etwa Änderungen bei Temperatur und Druck.
Im Gegensatz dazu gibt es bei der Fülle von Daten, die intelligente Systeme sammeln, eine wahre Explosion, so daß moderne Computer sie nicht in angemessener Zeit verarbeiten könnten. Die Natur sammelt hingegen nicht jede einzelne Information, sondern filtert heraus, was sie wirklich benötigt. Dabei registrieren die Sensoren nicht nur, sondern verarbeiten die Informationen auch direkt.
Spinnen tragen derartige Rezeptoren in Form winziger, empfindlicher Haare an den Beinen. Wenn das von ihnen gebaute Netz mit einer bestimmten Frequenz vibriert, verbinden sie das automatisch mit ‚Beute‘ oder ‚Partner/in‘. Niederfrequente Vibrationen, die vielleicht nur der Wind sind, werden hingegen nicht registriert, weil sie für das Überleben der Spinne unbedeutend sind.
Auch die neuen Mechanosensoren, die das Team entwickelt hat, ignorieren geringe Kräfte und geben em Rest der Maschine erst dann ein Signal, wenn die Empfindung eine bestimmte Schwelle erreicht. Der Trick dabei ist, die Sensoren aus einem Material herzustellen, das anfangs steif ist, aber seine Form rasch ändert, wenn eine äußere Kraft auf es einwirkt.
Wenn seine veränderte Form einen bestimmten Punkt erreicht, rücken die leitenden Partikel im Inneren des Materials näher aneinander, wodurch ein Strom fließt, der als Signal gedeutet wird, auf den das System je nach Bedarf reagiert. Der Betrieb eines solchen Systems erfordert weniger Energie und Rechenleistung, da die Prozessoren nicht ständig unnötige Stimulationen überprüfen müßten, um zu entscheiden, wann sie darauf achten sollten.
Mit Hilfe von Algorithmen des maschinellen Lernens sollen diese Sensoren nun so trainiert werden, daß sie bei minimalem Energieverbrauch autonom funktionieren. Strategisch auf Drohnen, Flugzeugen oder autonomen Autos plaziert, sollen sie dabei Objekte und Hindernisse zu erkennen und ihnen viel schneller auszuweichen, als es derzeit möglich ist.
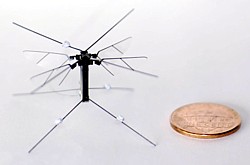
Ähnlich dem Drei-Gramm-Roboter DelFly Micro im Jahr 2008 oder
der RoboBee, deren Entwicklung ab März 2013 in
der entsprechenden Jahresübersicht ausführlich beschrieben wird, stellen
Forscher der University of Southern California (USC)
im Mai 2019 einen winzigen Insektenroboter namens Bee+ vor,
den es in zwei Ausführungen mit zwei bzw. vier Flügeln gibt.
Das USC-Team beobachtet dabei, daß die Bee+ zur Gierkontrolle tatsächlich vier Flügel braucht, wie es echte Insekten tun, was allerdings das Risiko mit sich bringt, daß der Roboter erheblich schwerer wird. Aus diesem Grund entwickelt Team leichtere, bessere Aktuatoren.
Während die RoboBee aus drei Schichten bestehende bimorphe Aktuatoren verwendet, deren beide äußeren piezoelektrischen Schichten sich durch ein Signal abwechselnd zusammenziehen, wodurch die innere Schicht hin- und hergebogen wird und wie ein Insektenflügel schlägt, nutzen die unimorphen Aktoren der USC nur einen Streifen aus piezoelektrischem Material, der die passive Schicht hin und her bewegt.
Durch die daraus resultierende Verbesserung der Flugsteuerung ist die Bee+ in der Lage, einer Bahn zu folgen und Hindernissen auszuweichen. Und weil diese unimorphen Aktoren einfacher sind, sind sie auch billiger herzustellen. Zudem sind die unimorphen Aktuatoren nur halb so schwer wie bimorphe Versionen, weshalb die Bee+ sogar mit vier 33 mm langen Flügeln nur 95 mg wiegt. Als nächstes will das Team die Fragen der Bordstromversorgung und der Mikroschaltkreise klären, die klein genug sind, um brauchbare Nutzlasten zu erlauben.
Ein autonomer Quadrokopter, der nicht nur fliegen kann, sondern sich bei Bedarf in ein rollendes Gefährt verwandelt, wird im Mai 2019 auf der International Conference on Robotics and Automation (ICRA) im kanadischen Montreal vorgestellt.

Der Flying Sprawl-Tuned Autonomous Robot (FSTAR), der von Forschern der Ben-Gurion University of the Negev um David Zarrouk entwickelt wurde, hat wie jede Drohne Propeller, zusätzlich aber auch seitlich angebrachte Räder, die von den gleichen Motoren angetrieben werden, die auch die Rotoren auf Touren bringen.
Besonders interessant ist, daß sich der Zwitter – wie ein Hund – kleiner macht, wenn er unter einem Hindernis durchschlüpfen muß. Dies wird möglich, da sich der Winkel, in dem die Arme aus dem Körper ragen, um bis zu 55° verstellen läßt. Was bedeutet, daß er seinen Körper effektiv anheben oder absenken kann,. Ebenso leicht kann er mit bis zu 2,6 m/s durch Röhren und Tunnel rollen.
Wird die FSTAR-Drohne beispielsweise als Lieferdrohne eingesetzt, kann sie ihre Sendung bis zur Haustür des Empfängers bringen, selbst wenn dieser in einem oberen Stockwerk wohnt. Denn die Drohne kann den Aufzug benutzen oder, wenn keiner da ist, die Treppen fliegend nehmen. Der jetzt vorgestellte Prototyp mit einer Einsatzzeit von 20 Minuten ist allerdings noch etwas schwach. Er kann maximal eine Last von 400 g transportieren, was zumindest für die Auslieferung von Medikamenten o.ä. reichen würde.
Wegen seiner Zwitterfunktion kann die Drohne auch in unwegsamem Gelände eingesetzt werden. Wenn der Untergrund zu holprig ist erhebt sie sich einfach in die Luft, was sie zu einem idealen Aufklärungsinstrument in Katastrophengebieten machen könnte. Laut dem Team sind zudem größere Versionen geplant, die sogar für den Personentransport geeignet sind.
Ebenfalls auf der ICRA im Mai berichten Forscher des California
Institute of Technology (Caltech) um Prof. Soon-Jo
Chung, daß sie ein System entwickelt haben, das ein tiefes
neuronales Netzwerk (Deep neural network, DNN) nutzt, um autonomen
Drohnen dabei zu helfen, zu ‚lernen‘, wie sie die Herausforderung von
Turbulenzen mit Bodeneffekten überwinden können, um sicherer
und schneller zu landen und dabei auch weniger Energie zu verbrauchen.
Das ‚tief‘ bezieht sich auf die Tatsache, daß bei DNNs Dateneingaben durch mehrere Schichten geschleust werden, von denen jede eingehende Information auf unterschiedliche Weise verarbeitet, um immer komplexere Details herauszuarbeiten. Derartige Netzwerke sind in der Lage, automatisch zu lernen, wodurch sie ideal für sich wiederholende Aufgaben sind.
Das von den Experten für künstliche Intelligenz und den Steuerungsexperten am Center for Autonomous Systems and Technologies (CAST) des Caltech entwickelte System namens Neural Lander ist demnach ein lernfähiger Controller, der die Position und Geschwindigkeit der Drohne verfolgt und ihre Landebahn und Rotorgeschwindigkeit entsprechend modifiziert, um eine möglichst energiesparende und sanfte Landung zu erreichen.
In diesem Zusammenhang soll erwähnt werden, daß die Firmen Daedalean und UAVenture im
September 2019 eine Einsteigerversion ihrer KI namens Magpie ankündigen,
die mit einer einfachen, nach unten gerichteten Kamera und einer Bildverarbeitung
auf Grundlage eines neuronalen Netzwerks arbeitet. Dies ermöglicht eine
GPS-unabhängige Navigation und erlaubt es Drohnen, sichere
Landeplätze zu finden. Magpie ist für professionelle
Drohnen gedacht und wird es ihnen ermöglichen, autonome Aufgaben auszuführen,
Hindernissen auszuweichen, nach Hause zurückzukehren und einen ungefährlichen
Landeplatz zu finden.
Die UAVenture hat bereits einen Autopiloten für Drohnen namens AirRails, der annähernd ähnliche Funktionen erfüllt, aber auf Radartechnologie basiert und daher begrenzt ist. Magpie wird als Upgrade zu AirRails erhältlich sein und soll noch vor Ende des Jahres auf den Markt kommen. Daedaleans Interesse richtet sich dagegen weniger auf Drohnen als auf große eVTOL-Fluggeräte.
Ende März 2020 veröffentlicht die EASA, die Flugsicherheitsbehörde der EU, einen gemeinsam mit Daedalean verfaßten, 104-seitigen Bericht über die Lernsicherheit für neuronale Netze, der auf den allgemeinen KI-Richtlinien der EU und der KI-Roadmap der EASA aufbaut. Er ist von der Homepage der Behörde aus abrufbar (‚Concepts of Design Assurance for Neural Networks, CoDANN‘). Der Zeitplan der EASA für die KI-Regulierung sieht das erste kommerzielle Produkt eines autonomen eVTOL-Flugzeugs frühestens für 2035 vor.
Daedalean hingegen ist ehrgeiziger und hat sich zum Ziel gesetzt, die Technologie vor der behördlichen Zulassung fertig zu haben. Das Unternehmen arbeitet bereits an der Umsetzung der Richtlinien für seine Produkte und will bis 2021 einen ersten Satz anwendbarer Leitlinien für sicherheitskritische Anwendungen des maschinellen Lernens entwerfen.
Im September demonstriert Daedalean, wie die KI Notlandeplätze erkennen und auswählen kann. Die KI ist dann in der Lage, Personen oder Gegenstände, die in potentielle Landeplätze eindringen, zu meiden und Landungen gegebenenfalls sogar automatisch abzubrechen.

Schon im Februar war im Zusammenhang mit dem o.e. CAST des des California
Institute of Technology (Caltech) über einen dort entwickelten zweibeinigen
Roboter namens LEgs ONboARD drOne (LEONARDO)
berichtet worden. Er wird hier erwähnt, da er anstatt eines Gyroskops
die Kraft von zwei Doppelpropeller-Drohnentriebwerken nutzt, um aufrecht
zu stehen bzw. auf seinen beiden Hühnerbeinen herumzulaufen oder sogar
auf nur einem herumzuhüpfen.
Das Team um die Professoren Morteza ,Mory’ Gharib und Soon-Jo Chung orientiert sich bei dieser Entwicklung an Vögeln, die zur Stabilisierung flattern, wenn sie über schwieriges Gelände laufen. Der von dem Doktoranden Alireza Ramezani designte und entwickelte Laufroboter, der Fliegen und Gehen kombiniert, ist 75 cm hoch und wiegt dank seiner Kohlefaserkonstruktion nur 2,75 kg. Viel Energie müssen die Propeller nicht aufbringen, um den Roboter anzuheben, weil dessen Füße ja zumeist Bodenkontakt haben.

(Grafik)
Da die Caltech-Wissenschaftler schon länger an der Entwicklung eines Mars-Hubschraubers mitwirken, über den ich in der Jahresübersicht 2015 berichtet habe (s.d.), erforschen sie nun, ob LEONARDO nicht wesentlich effizienter als ein traditioneller Hubschrauber in der rauhen Marslandschaft navigieren könnte, indem er seine Füße auf den Boden stellt und die Triebwerke nur leicht aufdreht. Und da die Triebwerke synchron mit den Beingelenken gesteuert werden, verfügt der Bot über eine überragende Balance.
Berichten vom Oktober 2021 zufolge kann der inzwischen nur noch LEO genannte hybride Laufroboter über ein Seil balancieren, Treppen bewältigen, sich gegen Seitenwind stellem und sogar auf einem Skateboard fahren. Durch die Verwendung einer Hybridbewegung, die irgendwo zwischen Gehen und Fliegen liegt, erhalten die Forscher das Beste aus beiden Welten in Bezug auf die Fortbewegung.
Im Zuge dieser Meldung veröffentlicht das Caltech auch ein neues Design, das eine eher praxisorientierte Ausgabe des LEO zeigt, wie sie in Zukunft nicht nur für erdgebundene Robotererkundungsmissionen zum Einsatz kommen könnte.

Im Juni 2023 erscheinen Berichte über einen weiteren am Caltech entwickelten Roboter, der wahlweise rollt, läuft oder Hindernisse überfliegt. Insgesamt soll er acht Bewegungsarten ausführen können, wobei er die Umgebung autonom bewertet, um die effektivste Fortbewegungsart zu wählen.
Der Prototyp namens Multi-Modal Mobility Morphobot (M4) verfügt über eine vielseitige Funktionalität, indem er sich auf vier Rädern fortbewegen oder auch seine Räder in Rotoren umwandeln und fliegen kann. Zudem beherrscht er die Fähigkeit, auf zwei Rädern wie auf Beinen zu stehen, um Hindernisse zu überblicken. Durch die Nutzung seiner Räder als Beine kann er sich sogar gehend fortbewegen. Darüber hinaus ist er in der Lage, mit Hilfe von zwei Rotoren steile Hänge hinaufzufahren und Stürze abzufangen, ohne dabei Schaden zu nehmen.
Der M4 hat eine Länge von 70 cm und ist jeweils 35 cm breit und hoch, wenn er als Fahrzeug auf dem Boden rollt. Wenn er auf den Hinterrädern steht und die vorderen Räder in die Luft ragen, erreicht er eine Höhe von 100 cm. Um in anspruchsvolleren Szenarien einsatzfähig zu sein, bedarf es weiterer Fortschritte bei der Entwicklung. Darüber hinaus muß der Roboter noch lernen, Werkzeuge zu handhaben. Zwar planen die Forschenden nicht, mit dem M4 in Massenproduktion zu gehen, möglicherweise könnte der Roboter aber bei künftigen Marsmissionen zum Einsatz kommen.
Eine weitere ungewöhnliche Drohne präsentiert ein Team der University
of California, Berkeley (UC Berkeley) um Prof. Mark
W. Mueller im Mai 2019 auf der International
Conference on Robotics and Automation (ICRA) in Montreal. Der
im Netz einsehbare Bericht trägt den Titel ‚Design and Control of a
Passively Morphing Quadcopter‘.
Das faltbare Modell kann sich dank federbelasteter Arme, die durch die Kraft der eigenen Propeller der Drohne gesteuert werden, in weniger als einer halben Sekunde um 50 % verkleinern.

der UC Berkeley
Der Trick dabei ist, daß die Federn eine konstante Spannung auf die passiv angelenkten Arme des Quadrokopters ausüben. Diese Spannung reicht aus, um die Arme nach innen zu drücken, wenn die Motoren ausgeschaltet sind. Werden diese jedoch eingeschaltet, ist die von ihnen ausgeübte Kraft stärker als die von den Federn ausgeübte Spannung, so daß die Arme wieder nach außen schnappen und dort bleiben.
Der Übergangspunkt ist sorgfältig kalibriert, um sicherzustellen, daß die Drohne die meiste Zeit ein Quadrokopter bleibt und sich nur dann zusammenfaltet, wenn dies erwünscht ist. Vereinfacht ausgedrückt bedeutet dies, daß die Schwerkraft oder der umgekehrte Schub ausreichen, um jeden der Arme nach Bedarf nach unten zu bewegen.
Im Dezember 2021 bekommt die inzwischen Midair Reconfigurable Quadcopter genannte experimentelle Drohne neue Presse, als das Team ein Video mit einer Reihe von Manövern veröffentlicht, bei denen sich das horizontal fliegende Fluggerät beispielsweise durch eine schmale vertikale Öffnung zwängt. Da die beiden heruntergeklappten Arme tatsächlich aufeinander zu drücken, können sie auch zum Greifen einer Schachtel mit flachen Seiten verwendet werden, die dann angehoben, durch die Luft geflogen und an einem anderen Ort freigegeben wird.
Recht praktisch wirkt auch die Fähigkeit der Drohne, z.B. auf einer Stromleitung zu landen und dann alle Propeller abzuschalten. Dadurch sinken alle vier Arme nach unten, wodurch der Schwerpunkt des Kopters unter seinen Kontaktpunkt verlagert wird und er auf der Stromleitung im Gleichgewicht bleibt, bis er schließlich wieder abhebt.

Eine weitere Idee für eine mehrmodale Drohne hat im Dezember 2019 der YouTuber Peter
Sripol, der sich darüber ärgert, daß sein Staubsauger-Roboter nicht
einmal über die niedrigste Schwelle hinüberkommt, geschweige denn in
der Lage ist, selbständig Treppen hinauf und hinunter zu steigen, um
mehrere Stockwerke eines Hauses zu reinigen.
Die Lösung des talentierten Amateur-Hackers, der besonders begabt ist, wenn es darum geht, Dinge zum Fliegen zu bringen, besteht darin, einen weniger als 100 $ teuren Robovac mit Funktionen zur Hindernisvermeidung und Kantenerkennung in eine Drohne zu verwandeln.
Dies gelingt mit einem Trio von ummantelten Propellern, einem Haufen Elektronik und einem Extrablock Batterien. Ein Nachteil ist allerdings, daß das Konstrukt bislang nicht autonom ist, sondern einen erfahrenen Piloten benötigt, der den Roboter mit Hilfe einer drahtlosen Fernbedienung zwischen den Stockwerken steuert.
Eine weitere Software, über die im Oktober 2019 berichtet
wird, ist am Massachusetts
Institute of Technology (MIT) entwickelt worden. Die Software FASTER simuliert
verschiedene Flugbahnen und bewertet sie anhand der Sicherheit. Autonome
Drohnen bewegen sich ja sehr vorsichtig, wenn sie im fremden Terrains
navigieren. Sie kartieren neue Bereiche, bevor sie sich weiterbewegen,
um nicht mit Objekten zu kollidieren. Der Mechanismus kostet jedoch Zeit
und kann bei Aufgaben wie Such- und Rettungsmissionen durch dichte Wälder
kritisch sein.
Das Programmpaket FASTER schätzt hingegen den schnellstmöglichen Weg vom Start- zum Zielpunkt, ohne Berücksichtigung der Sicherheit. Während sich die Drohne dann fortbewegt, zeichnet sie kontinuierlich kollisionsfreie Backup-Pfade auf, also Rückzugsmöglichkeiten, die von ihrer optimalen Flugbahn abweichen. Sollte die Software Unsicherheiten bei der Fortbewegung detektieren, weicht die Drohne von ihrer schnellsten Route ab, fliegt einen Umweg über den Sicherungspfad und gleicht die weitere Strecke neu ab.
Die Navigationssoftware wird anhand einer Simulation getestet, bei der sich eine virtuelle Drohne um Zylinder bewegen soll, die Bäume darstellen. Diese Aufgabe gelingt mit FASTER doppelt so schnell als ohne. In weiteren Praxistests erreichen Drohnen mit FASTER-Steuerung, die in einem großen Raum um Pappkartons manövrieren, Geschwindigkeiten von 7,8 m/s, was eine deutliche Verbesserung der Grenzen für die Fluggeschwindigkeit von Drohnen darstellt.
Wissenschaftler am Institut für Biologie der Universität Graz rund
um den Zoologen Manfred Hartbauer befassen sich im Forschungsprojekt Bionic
Kollision Avoid (BioKollAvoid), das im Oktober 2019 startet
und bis Ende November 2021 läuft, mit Wanderheuschrecken,
deren Verhalten sie auf das Flugverhalten von Drohnen übertragen wollen.
Dabei geht es um die visuellen Fähigkeiten der Insekten, deren bewegungsempfindliche
Augen beinahe einen Rundumblick besitzen und reflexartig auf sich annähernde
Objekte reagieren.
Das Anti-Kollisionsverhalten, das einzelnen Individuen in Schwärmen mit bis zu zehn Millionen Insekten erlaubt, effektiv Hindernissen auszuweichen, wird durch das Anbringen von Elektroden an zwei auf Nervensträngen sitzenden Neuronen, den sogenannten Kollisionsdetektorneuronen, abgeleitet, während den Insekten über zwei gekrümmte Monitore verschiedene Szenen vorgespielt werden.
Droht eine Kollision, werden bestimmte Nervenfasern aktiviert, was eine Abfolge von elektrischen Potentialen erzeugt. Die dabei gewonnene biologischen Daten werden in Form eines Algorithmus auf einen Chip gespeichert. In Zusammenarbeit mit der Grazer Firma Drone Rescue Systems Inc. kann der neuentwickelte Algorithmus im Falle einer unvermeidbaren Kollision einen Bremsfallschirm auslösen, um den Absturz des Flugobjekts zu verhindern. Im Oktober 2021 soll ein kostengünstiger und energiesparender Demonstrator mit optischem Kollisionssensor vorgestellt werden, der zuverlässig Ausweichmanöver ausführen kann.
Weiter mit den Elektro- und Solarfluggeräten 2019 ...