Buch der Synergie
| Blättern |
 TEIL C
TEIL C
MICRO ENERGY HARVESTING
Felder und Wellen
Magnetfeld (II)
Forscher der ETH Zürich und des Paul Scherrer Instituts (PSI) um Prof. Laura Heyderman und Bradley J. Nelson publizieren im November 2019 eine abrufbare Studie mit dem Titel ,Nanomagnetic encoding of shape-morphing micromachines’, in welcher sie über die Entwicklung nur wenige Mikrometer messenden formveränderlichen Mikromaschine berichten.
Für den Bau des Mikroroboters werden Arrays von Kobaltmagneten auf dünnen Schichten von Siliziumnitrid plaziert. Diese eindimensionalen Nanomagnete können so programmiert werden, daß sie eine bestimmte magnetische Ausrichtung annehmen. Werden sie dann einem externen Magnetfeld ausgesetzt, wirken spezifische Kräfte auf sie. Und befinden sich die Magnete in flexiblen Bauteilen, dann führen die auf sie wirkenden Kräfte zu einer Bewegung.
Die Nanomagnete lassen sich innerhalb weniger Nanosekunden immer wieder neu programmieren. Das führt zu jeweils unterschiedlichen Kräften, die auf die Konstruktion wirken, und damit zu neuen Bewegungen, die sich im Bereich von Millisekunden abspielen. Zur Demonstration wird eine Anordnung modularer Einheiten gebaut, die so programmiert werden können, daß sie sich in Buchstaben des Alphabets verwandeln.
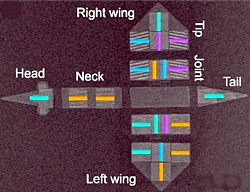
Darüber hinaus wird auf der Grundlage dieses Konzepts ein mikroskaliger ,Vogel’ konstruiert, der an einen mit Hilfe des Origami hergestellten Papiervogel erinnert. Wie die mit einem Rasterelektronenmikroskop gemachte Aufnahme zeigt, können die Nanomagnete in verschiedenen Ausrichtungen parallel zu den Farbbalken magnetisiert werden, wodurch der Vogel verschiedene Bewegungen ausführen kann, wie flattern, schweben, sich umdrehen, den Kopf einziehen oder zur Seite gleiten.
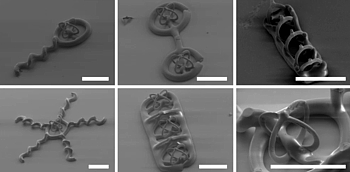
Genau ein Jahr später, im November 2020, veröffentlicht ein anderes Team der ETH Zürich um Prof. Salvador Pané und Carlos C. J. Alcântara die im Netz einsehbare Studie ,Mechanically interlocked 3D multi-material micromachines’. Diesmal geht es Mikromaschinen, bei denen Metall und Kunststoff auf komplexe Weise miteinander verwoben sind, was durch eine neue entwickelte Fertigungstechnik möglich wird, die auf der 3D-Lithografie basiert.
Metalle und Polymere haben unterschiedliche Eigenschaften, und beide Materialien bieten bestimmte Vorteile beim Bau von Mikromaschinen. Da diese von außerhalb des Körpers mit Hilfe von Magnetfeldern angetrieben werden, müssen sie mit magnetischen Metallteilen ausgestattet sein. Polymere haben dagegen den Vorteil, daß sich mit ihnen weiche, flexible und im Körper auflösende Bauteile konstruieren lassen. Indem beide Materialien miteinander kombiniert werden, lassen sich alle diese Eigenschaften gleichzeitig nutzen.
Um die Machbarkeit zu belegen, werden verschiedene winzige Fahrzeuge mit Kunststoffchassis und magnetischen Metallrädern entwickelt, die durch ein rotierendes Magnetfeld angetrieben werden. Einige der Fahrzeuge lassen sich über eine Glasoberfläche bewegen, andere können - je nach verwendetem Polymer - in einer Flüssigkeit oder auf einer Flüssigkeitsoberfläche schwimmen.
Die Wissenschaftler planen nun, ihre Zweikomponenten-Mikromaschinen zu verfeinern und mit anderen Materialien zu experimentieren. Darüber hinaus werden sie versuchen, komplexere Formen und Maschinen zu schaffen, einschließlich solcher, die sich selbst falten und entfalten können. Ein weiteres Forschungsziel ist die Herstellung von röhrenförmige Gefäßstützen (Stents), die mit Hilfe von Magnetfeldern an einer bestimmten Stelle im Körper positioniert werden können, wo sie sich dann selbst entfalten.
Tatsächliches Micro Energy Harvesting betreibt eine neue Methode der Pennsylvania State University (Penn State), die die nächste Generation smarter Sensoren durch externe Magnetfelder mit Strom versorgen soll. Dem im Netz einsehbaren Artikel ,Maximizing power generation from ambient stray magnetic fields around smart infrastructures enabling self-powered wireless devices’ vom April 2020 zufolge hat das Team um Prof. Shashank Priya einen Konverter entwickelt, mit dessen Hilfe schwache elektromagnetische Felder für die Gewinnung von elektrischer Energie genutzt werden können.
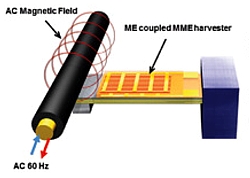
(Grafik)
Der magneto-elektrisch gekoppelte magneto-mechano-elektrische Konverter (ME MME) besteht aus einem Verbund zweier Materialien, von denen eines magnetostriktiv ist, also auf die Präsenz eines Magnetfeldes durch Veränderung seiner Ausdehnung reagiert (Fe85B5Si10 Metglas). Durch die schnelle Wechsel der Polung bei Magnetfeldern, die durch den Wechselstrom der Stromnetze erzeugt werden, wird das Material zum Vibrieren gebracht. Ergänzt wird dieses Material durch einen piezoelektrischen Cantilever oder Ausleger, der die mechanische Bewegungen in Strom umwandelt.
Die beiden Materialien werden zu einem papierdünnen, etwa 6 cm langen Streifen kombiniert. Das eine Ende des Streifens wird bei Lampen, an Stromkabeln oder einem beliebigen festen Objekt in der Nähe eines Elektrogeräts befestigt, während das andere Ende frei schwingt und mit zusätzlichen Dauermagneten versehen ist, die die Vibration verstärken. Schon bei ersten Testes wird bei Magnetfeldern unterhalb von 300 Mikrotesla (μT) eine Leistung im Milliwattbereich erreicht.
So wird das Gerät, das etwa 40 mm im Quadrat mißt, knapp 10 cm Entfernung zu einem herkömmlichen Heizofen positioniert - und generiert dabei genug Strom, um insgesamt 180 LEDs zu versorgen. Bei einem Abstand von rund 20 cm reicht die Leistung noch aus, um eine digitale Weckuhr zu betreiben. Den Forschern zufolge, die bei ihrer Arbeit mit dem US Army Combat Capabilities Development Command (DEVCOM) zusammenarbeiten, sei der Ertrag 400 % höher als bei vergleichbaren Technologien.
Priya hatte schon während seiner Zeit an der Virginia Polytechnic Institute and State University (Virginia Tech) im März 2018 über einen ME-gekoppelten MME-Harvester berichtet, der mit einem externen Magnetfeld interagiert, um elektrische Energie zu erzeugen. Der damalige Energiewandler bestand aus mehreren Schichten amorphen magnetostriktiven Materials, einem piezoelektrischen Makrofaserverbundstoff und einer magnetischen Spitzenmasse. Die vom diesem Harvester erzeugte elektrische Leistung war bereits ausreichend für den Betrieb von Mikrosensoren wie Kreisel-, Temperatur- und Feuchtigkeitssensoren sowie von drahtlosen Datenübertragungssystemen.
An der damaligen Studie mit dem Titel ,High Power Magnetic Field Energy Harvesting through Amplified Magneto-Mechanical Vibration’ sind auch Kollegen des Korea Institute of Materials Science (KIMS) und der Yeungnam University beteiligt.
Zudem soll auf den Artikel ,Large Power Amplification in Magneto-Mechano-Electric Harvesters through Distributed Forcing’ vom Januar 2020 hingewiesen werden, der eine Methode vorstellt, um die Resonanzfrequenz der MME-Harvester unter allen Betriebsbedingungen aufrecht zu erhalten und gleichzeitig die Ausgangsleistung zu erhöhen.
Erreicht wird dies durch eine Verteilung der magnetischen Masse über den Balken, was die Ausgangsleistung bei einer konstanten Resonanzfrequenz deutlich erhöht und eine 280 %-ige Verbesserung der Energieerzeugung im Vergleich zu einer traditionellen Architektur zeigt. Dies reicht nachweislich aus, um acht verschiedene Onboard-Sensoren mit integrierter drahtloser Datenübertragung in einer Drohne zu betreiben.
Im März 2025 folgt eine Veröffentlichung mit dem Titel ,Co-Doped Hybrid Magneto-Mechano-Electric Generator for Powering Watt-Level IoT Systems’, die gemeinsam mit Forschern der Korea Maritime and Ocean University sowie der Pukyong National University in Südkorea verfaßt wurde. Hier geht es um MME-Generatoren, die durch eine Co-Dotierung von piezoelektrischen Einkristallen Pb(Mg1/3Nb2/3)O3-Pb(Zr,Ti)O3 (PMN-PZT) mit Mangan und Lanthan eine Ausgangsleistung erreichen, die IoT-Anwendungen auf Watt-Ebene versorgen kann.
Um den Hybrid-MME-Generator (H-MME) zu vervollständigen, der eine mittlere Gesamtleistung von 82,19 mW erreicht, wird der piezoelektrische Cantilever mit einer elektromagnetischen Spule kombiniert. Im Versuchseinsatz versorgt der Generator erfolgreich ein Smart-Farm-System mit hohem Energiebedarf, das einen Stromverwaltungsschaltkreis, eine Kamera, einen Mikrocontroller und ein Bluetooth-Modul umfaßt, um in Intervallen von anderthalb Stunden Fotos an ein Smartphone zu übertragen.
Weiter mit der allgemeinen Übersicht: Im Juli 2020 stellt ein Forscherteam der Technischen Universität Eindhoven in den Niederlanden einen zentimetergroßen Unterwasserroboter vor, der mit Magneten und Licht betrieben wird. Die Gruppe um Marina Pilz Da Cunha veröffentlicht darüber den einsehbareren Artikel ,An artificial aquatic polyp that wirelessly attracts, grasps, and releases objects’.
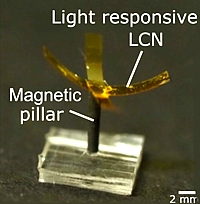
Der kabellose Unterwasserroboter ist von Korallenpolypen inspiriert, kleinen und weichen Organismen, die sich in großer Zahl zusammenschließen und schließlich Korallenriffe bilden. Die Lebewesen verfügen über einen zentralen Stiel, der durch gezielte Bewegungen kleine Strömungen erzeugt, die wiederum Nahrungsteilchen anziehen, nach denen die Tentakel greifen können.
Das Team ahmt dies nach, indem sie mit einem Stengel beginnen, der sich unter dem Einfluß eines rotierenden Magneten bewegt und so Strömungen im umgebenden Wasser erzeugt. Dadurch werden Schadstoffpartikel im Wasser angezogen, die dann von lichtaktivierten Tentakeln übernommen werden, die aus einem photomechanischen Polymermaterial gefertigt sind, das auf verschiedene Wellenlängen des Lichts reagiert.
Bei UV-Licht reagieren die Tentakel mit einer ,Greif’-Bewegung, während blaues Licht sie zum ,Loslassen’ veranlaßt. Insgesamt ergibt sich so ein weicher Roboter von einem Zentimeter Länge auf jeder Seite, der mit Hilfe von Magneten und Licht kleine Gegenstände unter Wasser greifen und auch dazu gebracht werden kann, beispielsweise den ,Greif’-Zustand beizubehalten, bis er dem richtigen Licht ausgesetzt wird, um sie wieder freizugeben.
Mit dieser Fähigkeit stellt sich das Team eine Reihe von Anwendungen für die neue Maschine vor, darunter das Einsammeln von Verunreinigungen mit den Tentakeln oder sogar das Erfassen von Zellen als Werkzeug in der Biomedizin. In einem Experiment wird die Fähigkeiten des Roboters demonstriert, indem er Öltröpfchen aus einer Wasserprobe fängt. Im nächste Schritt soll an der Herstellung einer Flotte kleiner Roboter gearbeitet werden, die zusammenarbeiten können, um Partikel zu transportieren, wobei einer sie an den nächsten weitergibt.
Im November 2020 berichten die Fachblogs, daß Wissenschaftler um Prof. Yajing Shen von der City University of Hong Kong (CityU) gemeinsam mit Kollegen des Shenzhen Institutes of Advanced Technology (SIAT) der Chinesischen Akademie der Wissenschaften eine einfache Methode zur Herstellung von Roboter im Insektenmaßstab entwickelt haben - durch den Einsatz eines klebstoffähnlichen Magnetsprays, mit dem nicht lebende Objekte beschichtet werden.
Das M-Spray (o.: agglutinierende, reprogrammierbare, desinfizierbare und biokompatible magnetische Spray) besteht hauptsächlich aus Polyvinylalkohol (PVA), Gluten und magnetischen Eisenpartikeln und kann auf rauhen und glatten Oberflächen von ein-, zwei- oder dreidimensionalen Objekten sofort stabil und fest haften. Der Film, der sich auf der Oberfläche bildet, ist nur etwa 0,1 - 0,25 mm dick und damit dünn genug, um die ursprüngliche Größe, Form und Struktur der Objekte zu erhalten.
Nach dem Beschichten wird das Objekt mit einer oder mehreren Magnetisierungsrichtungen magnetisiert und anschließend erwärmt, bis sich die Beschichtung verfestigt. Die aus dem M-Spray gebildete M-Haut ist durch Anpassen der leichten Magnetisierungsrichtung ohne Änderung der Hauptstruktur umprogrammierbar. Auf diese Weise entstehen Milliroboter, deren Bewegungen wie Krabbeln, Drehen, Gehen und Rollen auf Oberflächen wie Glas, Haut, Holz oder Sand durch ein Magnetfeld angetrieben und gesteuert werden können.

Das Team demonstriert diese Eigenschaft, indem es Baumwollfäden (1D), Origami-Objekte (2D flache Ebene), Polydimethylsiloxan (PDMS)-Folie (2D gekrümmte/weiche Oberfläche) und Kunststoffkapseln (3D rundes Objekt) in weiche Reptilroboter, Mehrfußroboter, Laufroboter bzw. Rollroboter verwandelt. Das Besondere an diesem Ansatz ist, daß der Fortbewegungsmodus der Bots bei Bedarf umprogrammiert werden kann. So wird mit einem dreiteiligen Reptilien-Milliroboter der Wechsel demonstriert von einer schnelleren 3D-Raupenbewegung in einer weitläufigen Umgebung zu einer langsameren 2D-Ziehharmonikabewegung, um eine enge Lücke zu passieren.
Da die M-Spray-Beschichtung bei Bedarf durch Erhöhung der kinetischen Energie der magnetischen Teilchen aufgelöst werden und in Pulver zerlegt werden kann, was durch Anlegen eines oszillierenden Magnetfelds in einer wäßrigen Umgebung geschieht, und da alle Bestandteile biokompatibel sind, besitzt die Technologie das Potential für biomedizinische Anwendungen. In-vivo-Tests werden mit Kaninchen durchgeführt. Das Forschungsteam veröffentlicht die Ergebnisse unter dem Titel ,An agglutinate magnetic spray transforms in inanimate objects into millirobots for biomedical applications’.
Ein weiterer Mikroroboter, der durch Magnetfelder gesteuert
durch das Modell einer menschlichen Hirnarterie zu einem künstlichen
Aneurysma navigieren kann, wird im Juli 2021 von Forschern der Universität
zu Lübeck und der Fraunhofer-Einrichtung für Individualisierte
und Zellbasierte Medizintechnik (IMTE) um Franz Wegner und Thorsten
M. Buzug vorgestellt. Ihr Artikel ,Navigation of a magnetic
micro-robot through a cerebral aneurysm phantom with magnetic particle
imaging’ ist im Netz einsehbar.
der IMTE
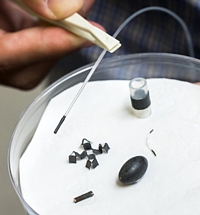
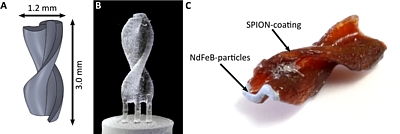
Der schwimmende, spiralförmige Mikroroboter ist 3 mm lang und 1,2 mm breit und damit kleiner als ein Reiskorn. Vom Aussehen ähnelt er frappant einem verdrillten Savonius-Windrotor. Er wird mittels 3D-Druck hergestellt und ist mit einem magnetischen Lack beschichtet, für den magnetische Nanopartikel verwendet werden. Drehende magnetische Felder bewirken eine Drehung und damit die Vorwärtsbewegung.
Die Magnetfelder werden mit einem MPI-Scanner (Magnetic Particle Imaging) appliziert, der die Navigation und tomographische Visualisierung mit demselben Gerät ermöglicht. Mit der Magnetpartikelbildgebung, die die magnetischen Nanopartikel visualisiert, mit denen der Mikroroboter beschichtet ist, kann der Aktuationsprozeß mit einer Lokalisierungsgenauigkeit von 0,68 mm bestimmt werden, ohne daß eine Strahlenbelastung entsteht.
Ein Team des Korea Advanced Institute of Science and Technology (KAIST) unter der Leitung von Prof. Jae-Woong Jeong präsentiert im Januar 2021 ein medizinisches Implantat, das bei der Regulierung der Gehirnaktivität zur Behandlung von Krankheiten wie Parkinson und Depressionen hilft.
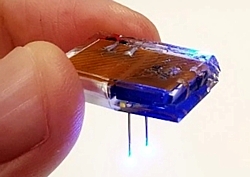
Um gezielt das Verhalten von lichtempfindlichen Gehirnzellen zu verändern, nutzt das Gerät winzige LEDs, die an sehr feinen Sonden befestigt sind, die etwa so dick wie ein menschliches Haar sind und auch dazu verwendet werden können, dem Organ Medikamente zuzuführen.
Im Gegensatz zu früheren Ausführungen, die zusätzliche Operationen zum Batteriewechsel erforderten, enthält die neue und verbesserte Version einen drahtlosen Energiesammler mit einer Spulenantenne, die magnetische Wechselfelder einfängt, die harmlos durch die Haut gepulst werden, Strom erzeugen und die kleine Batterie des Implantats aufladen.
Das Gerät verfügt über einen Bluetooth-Chip, um die LED-Leuchten über ein Smartphone zu steuern und so programmierbare Muster zu erzeugen, die auf bestimmte Ergebnisse zugeschnitten werden können. Der Artikel ,Soft subdermal implant capable of wireless battery charging and programmable controls for applications in optogenetics’ ist ebenfalls einsehbar.

bewältigt 25°
Im August 2021 folgt ein Bericht von Wissenschaftlern der Purdue University um Prof. David Cappelleri, die darin einen speziell für den Einsatz im empfindlichen zentralen Nervensystem konzipierten Mikroroboter beschreiben, der gemeinsam mit einer Gruppe von US-Forschungsinstituten und Biotechnologieunternehmen entwickelt wurde. Die Wissenschaftler hoffen, diesen eines Tages in das Rückenmark injizieren und dann unter Umgehung der Blut-Hirn-Schranke durch die Rückenmarksflüssigkeit in das Gehirn leiten zu können.
Der millimetergroße, magnetisch steuerbare MANiAC (magnetically aligned nanorods in alginate capsules) besteht aus einer Gruppe von ausgerichteten magnetischen Nickelnanostäbchen, die von einer weichen, kugelförmigen Alginathülle umschlossen sind. Wird er einem externen rotierenden Magnetfeld ausgesetzt, taumelt bzw. rollt der Mikrobot in die Richtung der Rotation. Durch langsames Bewegen des Elektromagneten ist es daher möglich, den MANiAC von einem Ort zum anderen zu führen.
In Labortests sind die weichen, kapselbasierten Mikrobots in der Lage, bis zu 45° steile Hänge hinaufzuklettern und sich stromaufwärts gegen eine Flüssigkeitsströmung zu bewegen. Sie können sich durch Rattenhirngewebe bewegen und an bestimmten Orten eine Pause einzulegen, um grünen Farbstoff freizusetzen, der eine medizinische Nutzlast simuliert. Auch dieser Artikel ,Soft Capsule Magnetic Millirobots for Region-Specific Drug Delivery in the Central Nervous System’ ist im Netz einsehbar.

Tentacle Robot
Ingenieure und Kliniker der University of Leeds berichten wiederum im März 2022 über die Entwicklung eines magnetisch gesteuerten Roboters mit einem Durchmesser von 2 mm, der künftig in die feinen Verästelungen der Bronchien eindringen soll, um Gewebeproben zu nehmen oder Krebs zu behandeln.
Um die Steuerbarkeit zu optimieren, ist der Magnetic Tentacle Robot aus einer Reihe von miteinander verbundenen zylindrischen Segmenten mit einer Länge von rund 80 mm angefertigt. Die Segmente bestehen aus einem weichen gummiartigen Material, das mit winzigen magnetischen Partikeln imprägniert ist. Durch ein zielgerichtet agierendes, äußeres Magnetfeld können die Segmente einzeln angesteuert werden, so daß sich der Roboter Krümmungen anpassen kann.
Bewährt sich der Roboter in Lungen- und Bronchienmodellen, soll er mit ebenfalls magnetisch steuerbaren Aktuatoren ausgestattet werden, die beispielsweise Gewebeproben entnehmen oder Medikamente transportieren sollen. Kontextbezogen sei hier auch auf die im Juli 2023 veröffentliche einsehbare Studie ,Personalized magnetic tentacles for targeted photothermal cancer therapy in peripheral lungs’ verwiesen, in welcher die Forscher eine Umsetzung mit verbesserter Navigationstiefe beschreiben.
Ein Team chinesischer Wissenschaftler um Li Zhang an der University of Hongkong publiziert im März 2022 den Bericht über die Entwicklung einer Art von magnetischem Schleim auf der Basis von Nicht-Newtonschen Flüssigkeiten, der sich über ein äußeres Magnetfeld ansteuern läßt.

Schleim
Der Softroboter soll in Zukunft im menschlichen Körper eingesetzt werden, um beispielsweise verschluckte Gegenstände zu bergen oder Verletzungen zu reparieren. Die Studie trägt den Titel ,Reconfigurable Magnetic Slime Robot: Deformation, Adaptability, and Multifunction’, ist allerdings nicht einsehbar.
Der Schleimroboter hat in etwa die Größe eines Tischtennisballs und ist damit deutlich größer als ähnliche Ansätze, die sich in Arterien und Venen bewegen sollen. Außerdem besteht er aus einer recht giftigen Mischung von Neodym-Magnetpartikeln, Borax und Polyvinylalkohol, was ihm zu einem wenig ansehnlichen dunkelbraunen Aussehen verhilft. Die Ansteuerung erfolgt über ein externes Magnetfeld, mit dem es gelingt, die Form des Roboterschleims gezielt zu manipulieren und ihn etwa in eine Kugel oder eine Stiftform zu bringen.
Der magnetische Schleim kann in verschiedene Richtung bewegt werden und dabei seine Form so verändern, daß er sich durch unterschiedliche Öffnungen durchzwängen kann. Ebenso kann er Objekte umschließen, um sie zu bewegen. Außerdem erweist er sich generell als widerstandsfähig und verfügt über die Eigenschaft, sich selbst heilen zu können. So kann er zerteilt und wieder zusammengefügt werden, ohne daß er dabei seine Eigenschaften verliert.
Im Dezember 2023 sind es Wissenschaftler der Universität Twente, des niederländischen Radboud University Medical Center und der israelischen Firma Triticum Medical Ltd., die einen magnetisch gesteuerten Milliroboter vorstellen, der Blutgerinnsel entfernen soll, indem er sich seinen Weg durch die Blutgefäße des Patienten bahnt. Die Idee ist, daß ein oder mehrere Roboter über eine Kanüle in das betroffene Blutgefäß eingeführt und dann aus der Ferne gesteuert werden, bis sie das Gerinnsel erreichen, um es durch Anbohren aufzubrechen.
(Grafik)
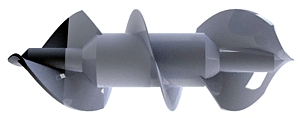
Das winzige Gerät, das sich derzeit im Versuchsstadium befindet, besteht aus einem 3D-gedruckten korkenzieherförmigen Körper, der etwa so groß ist wie ein Reiskorn und einen 1 x 1 mm großen Permanentmagneten enthält. Um es zu bewegen, wird ein externer rotierender Magnet verwendet. Durch dessen Drehung wird der magnetisierte Körper des Milliroboters um seine Längsachse gedreht, so daß er durch das Blut im Gefäß schwimmen kann, sogar gegen die Blutflußrichtung.
Sobald das Gerinnsel aufgebrochen ist, kehrt der externe Magnet seine Drehrichtung um. Dies veranlaßt den Millirobot, seine Drehrichtung ebenfalls umzukehren, so daß er das Blutgefäß hinunter zur Kanülenstelle zurückschwimmt und wieder entfernt werden kann. Im Laborexperiment wird ein rotierender Magnet an einem Roboterarm verwendet, um mehrere Milliroboter durch Blutgefäße zu führen, die eine extrahierte Schweine-Aorta und Nieren miteinander verbinden.
Tatsächlich wird im Februar 2025 gemeldet, das es dem Team um Islam Khalil und Michiel Warlé zwischenzeitlich gelungen sei, ein Gerinnsel in einer Arterie zu schreddern, die einem Schaf entnommen worden war. Der Roboter hat den Propf dabei vollständig zerkleinert.
Ebenfalls im Dezember 2023 berichten Forscher der Universität
Bayreuth um Prof. Thomas M. Fischer und Prof. Daniel
de las Heras in ihrer im Netz einsehbaren Publikation ,Simultaneous
and independent topological control of identical microparticles in
non-periodic energy landscapes’ über eine Methode, um winzige Teilchen
in Flüssigkeiten mittels magnetischen Mustern präzise zu steuern. In
dem involvierten Team arbeiten auch Kollegen der Universität
Kassel und der Polnischen Akademie der Wissenschaften.
Der gleichzeitige und unabhängige Transport von identischen kolloidalen Teilchen, also Nano- bis Mikrometer große Teilchen, die in einer Flüssigkeit suspendiert sind, über magnetische Mustern soll u.a. dazu beitragen, biomedizinische Anwendungen zu verbessern und Labortests durchzuführen. Im Einzelnen geschieht dies, indem magnetische Mikropartikel über einem magnetischen Muster angeordnet werden, das aus nach oben und unten magnetisierten Bereichen besteht, die je nach Position über dem Muster unterschiedlich angeordnet sind.
Der Transport wird dann durch Modulationsschleifen der Ausrichtung eines externen Magnetfelds angetrieben. Aufgrund der Kopplung zwischen dem externen Magnetfeld und dem durch das Muster erzeugten Magnetfelds entsteht eine komplexe zeitabhängige und nichtperiodische Energielandschaft. Dabei können beliebig komplexe und maßgeschneiderte Trajektorien mehrerer identischer kolloidaler Teilchen gleichzeitig entweder im Muster oder in den Modulationsschleifen kodiert werden.
Zur Veranschaulichung zeigen die Wissenschaftler, wie identische kolloidale Teilchen unter dem Einfluß der gleichen Modulationsschleife die ersten achtzehn Buchstaben des Alphabets schreiben können. Die präzise und gezielte Steuerung von kolloidalen Partikeln mit Hilfe von Magnetfeldern kann aber auch zur Entwicklung von mikrofluidischen Systemen genutzt werden, in denen Partikel für Labortests und medizinische Diagnosen transportiert werden.

des MIT
Im Januar 2024 veröffentlicht ein Team des Massachusetts Institute of Technology (MIT) eine Studie über die Entwicklung eines sich selbst versorgenden Sensors, der den benötigten Strom aus einem Magnetfeld in seiner direkten Umgebung entziehen kann, wie z.B. jenem, welches sich um stromführende Kabel bildet. Im Gegensatz zu herkömmlichen Konstruktionen der Stromversorgung müssen im vorliegend Fall drei Punkte anders gemacht werden.
Zum einen kann auf diese Weise keine erhöhte Spannung für den Start der Elektronik zur Verfügung gestellt werden, weshalb integrierte Schaltkreise und Transistoren zuerst die nötige Energie speichern. Erst danach startet das ganze System. Der zweit Punkt betrifft die Speicherung selbst. Statt einem Akku mit begrenzter Lebensdauer wird auf Kondensatoren gesetzt, die äußerst langlebig sind und für eine gewisse Zeit so viel Energie speichern, daß der Sensor beginnen kann, Energie selbst zu ernten und Meßdaten zu senden.
Zu guter Letzt sorgt der eingebaute Mikrocontroller für eine kluge Steuerung des Sensors. Ist ausreichend Energie vorhanden, werden Daten erfaßt und gesendet. Verringert sich die Energiemenge, pausiert der Sensor, bis wieder genug Strom fließt. Die Studie ,Rule the Joule: An Energy Management Design Guide for Self-Powered Sensors’ vom Team um Steven B. Leeb ist allerdings nicht öffentlich einsehbar.
Japanische Wissenschaftler des Okinawa Institute of Science and Technology (OIST) um James Twamley haben gemäß einer im März 2024 erschienen und im Netz einsehbaren Studie mit dem Titel ,Feedback cooling of an insulating high-Q diamagnetically levitated plate’ ein kostengünstiges Material entwickelt, das ohne Energiezufuhr über magnetischen Oberflächen schweben kann. Mitbeteiligt an der Entwicklung sind Kollegen der Macquarie University in Australien, der Escuela de Ingenieria y Ciencias in Mexiko sowie der Yuan Ze University in Taiwan.
Levitation
Die bislang verwendete Magnetschwebetechnik, um z.B. Maglev-Züge zum Schweben zu bringen, macht eine starke Energiequelle erforderlich, insbesondere wenn sie Supraleiter bei nahezu kryogenen Temperaturen einsetzt. Die nun präsentierte Technologie, die auf einer schwebenden Plattform aus Graphit basiert, benötigt hingegen keine externe Energie.
Ausgangspunkt ist normales Graphit, das hochgradig diamagnetisch ist, was bedeutet, daß es über Magneten schweben kann, aber nur für kurze Zeit. Da der Fluß elektrischer Ströme durch das Graphit einen Energieverlust verursacht, bringt dieser das schwebende Objekt schnell zum Sinken. Das Phänomen wird als Wirbeldämpfung bezeichnet. Um dies zu verhindern, werden die mikroskopisch kleinen Graphitkügelchen chemisch mit Siliziumdioxid beschichtet, das elektrisch isolierend ist.
Schließlich werden die beschichteten Graphitpartikel mit hochvakuumtauglichem Wachs vermischt und zu dünnen quadratischen Platten von etwa 1 cm2 Größe gepreßt. Dabei bleibt der Graphit diamagnetisch, aber die Isolierung verhindert den Energieverlust, der die Schwebekraft aufheben würde. In Tests können die beschichteten Graphitplattformen tatsächlich über längere Zeit über einer schachbrettartigen Fläche schweben, die aus Magneten mit abwechselnden Nord- und Südpolen besteht.
Dem Team zufolge könnte das schwebende Plattformsystem zu neuartigen Sensoren führen, die Kraft, Beschleunigung und Schwerkraft messen. Für noch präzisere Quantensensoren verwendet eine andere Version eine rückgekoppelte magnetische Kraft, um die vertikalen Bewegungen der Plattform kontinuierlich zu korrigieren und sie abzukühlen, um ihre kinetische Energie zu verringern. Der Nachteil dabei ist jedoch, daß dies den Bedarf nach externer Energie mit sich bringt.
(Grafik)
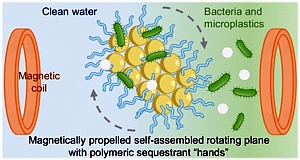
Im Mai 2024 folgt die einsehbare Veröffentlichung ,Magnetic Microrobot Swarms with Polymeric Hands Catching Bacteria and Microplastics in Water’, die von Wissenschaftlern der tschechischen Brno University of Technology um Martin Pumera stammt und neu entwickelte, im Durchmesser lediglich 2,8 µm kleine, schwimmende Mini-Roboter beschreibt, die gegen Mikroplastik und bakterielle Verunreinigungen des Wassers eingesetzt werden sollen.
Die magnetisch gesteuerten Mikroroboter verfügen um ihren magnetischen Kern herum über polymere Sequestriermittel, die im Allgemeinen dazu verwendet werden, um Kalzium- und Magnesiumionen im Wasser einzufangen und so Kalkablagerungen zu vermeiden. Unter dem Einfluß äußerer Magnetspulen, die ein rotierendes Magnetfeld erzeugen, fügen sich die einzelnen magnetischen Perlen selbständig zu Ketten bzw. drehenden Ebenen zusammen, was eine Modulation ihrer Antriebsgeschwindigkeit ermöglicht und eine kollektive Bewegung bewirkt.
Indem das Sequestriermittel wie ,Hände’ agiert, können die mobilen robotischen Schwärme frei schwimmende Bakterien und Mikroplastikpartikel einfangen und so die Gewässer reinigen. Im Anschluß können die Mikroroboter - ebenfalls per Magnetismus - aus den Medien gesammelt und die eingefangenen Verunreinigungen in einem zweiten Gefäß kontrolliert freigesetzt werden, was mit Hilfe von Ultraschall erfolgt. Unter Laborbedingungen werden etwa 80 % der Erreger abgetötet. Um verbleibende Bakterien zu beseitigen, wird das Restwasser einer zusätzlichen UV-Bestrahlung unterzogen.
Ein weiterer reiskorngroßen Softroboter, der durch Magnetfelder gesteuert Medikamenten durch den Körper transportieren und an einem bestimmten Ziel freisetzen soll, wird im September 2024 von Forschern der Nanyang Technological University (NTU) in Singapur um Prof. Guo Zhan Lum vorgestellt.
der NTU
Grundlage dafür sind frühere Arbeiten, darunter die gemeinsam mit dem MPI-IS und anderen Partnern über zehn Jahre zuvor durchgeführten Forschungen (s.o.). Die nicht einsehbare Studie trägt den Titel ,Magnetic Miniature Soft Robot with Reprogrammable Drug-Dispensing Functionalities: Toward Advanced Targeted Combination Therapy’.
Eine Besonderheit des winzigen, biokompatibelen Roboters aus Polymeren und magnetischen Mikropartikeln ist, daß er über vier Kammern verfügt, die verschiedene Medikamente aufnehmen und abgeben können. Durch magnetische Wechselfelder betätigt, lassen sich damit vier Arten von Medikamenten in programmierbarer Reihenfolge und Dosierung abgeben.
Der Roboter im Millimeter-Maßstab kann durch Flüssigkeiten unterschiedlicher Viskosität navigieren, die die Umgebung im menschlichen Körper nachahmen, und ist in Labortests in der Lage, sich mit einer Geschwindigkeit zwischen 0,30 mm und 16,5 mm pro Sekunde zu vier verschiedenen Regionen zu bewegen, um an jeder Stelle ein bestimmtes Medikament freizusetzen. Dabei gelingt es auch ein Medikament über acht Stunden hinweg langsam freizusetzen. Im Laufe der nächsten zwei bis fünf Jahren sollen Tierversuche stattfinden.
Übrigens wurde auch dieses Team ursprünglich von dem Science-Fiction-Film Fantastic Voyage aus dem Jahr 1966 inspiriert, in welchem ein U-Boot auf mikroskopische Größe geschrumpft und mit seiner kleinen Besatzung in den Blutkreislauf eines Wissenschaftlers injiziert wird, um diesen zu heilen und zu retten.
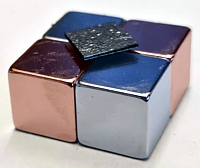
Ebenfalls an Roboterschwärmen arbeiten Wissenschaftler der Hanyang University und der Inha University in Südkorea, wie aus der im Dezember 2024 publizierten, einsehbaren Studie ,Magnetic swarm intelligence of mass-produced, programmable microrobot assemblies for versatile task execution’ hervorgeht. Während sich frühere Forschungen auf kugelförmige Roboter konzentrierten, die durch Punkt-zu-Punkt-Kontakt zusammenkommen, entwickelt das Team um Jeong Jae Wie würfelförmige Mikrorobotern, die eine stärkere magnetische Anziehungskraft ausüben, da größere Flächen - ganze Seiten jedes Würfels - in Kontakt kommen können.
Jeder Mikroroboter ist 600 µm groß und besteht aus einem Epoxidkörper, in den Partikel aus ferromagnetischem Neodym-Eisen-Bor (NdFeB) eingebettet sind, so daß er auf Magnetfelder reagieren und mit anderen Mikrorobotern interagieren kann. Durch ein Magnetfeld, das durch die Rotation von zwei miteinander verbundenen externen Magneten erzeugt wird, kann sich der Schwarm selbst zusammensetzen. Indem der Winkel variiert wird, in dem die Roboter magnetisiert werden, können diese so programmiert werden, daß sie sich in verschiedenen Konfigurationen zusammenfinden.
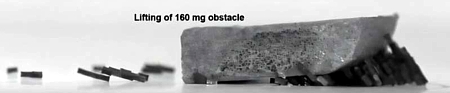
Bei den Tests überraschen die hohe Anpassungsfähigkeit der Mikroroboterschwärme an ihre Umgebung und das hohe Maß an Autonomie bei der Schwarmsteuerung. Es zeigt sich, daß die Schwärme ein Hindernis erklimmen können, das fünfmal höher ist als die Körperlänge des einzelnen Mikroroboters, und sich dann einzeln über das Hindernis schleudern können.
Und ähnlich wie Ameisen, die zusammenarbeiten, um herkulische Leistungen zu vollbringen, bildet ein großer Schwarm aus 1.000 Mikrorobotern ein Floß, das auf dem Wasser schwimmt und sich um eine Pille wickelt, die 2.000 Mal mehr wiegt als der einzelne Roboter, so daß der Schwarm das Medikament durch die Flüssigkeit transportieren kann. An Land gelingt es einem Roboterschwarm, eine Fracht zu transportieren, die 350-mal schwerer ist als jeder einzelne Roboter, während ein anderer Mikroroboterschwarm in der Lage ist, Röhren zu öffnen, die verstopften Blutgefäßen ähneln.
Die Zusammenarbeit macht die Roboter zudem widerstandsfähiger gegen Mißerfolge - selbst wenn einige Mitglieder der Gruppe das Ziel nicht erreichen, führen die anderen ihre programmierten Bewegungen weiter aus, bis schließlich genügend von ihnen erfolgreich sind. Um eine einheitliche Geometrie und Magnetisierungsprofile für eine gleichbleibende Leistung zu gewährleisten, entwickelt das Team zudem eine kosteneffiziente Massenproduktionsmethode. Bevor die Schwärme in der Praxis eingesetzt werden können, müssen sie aber noch ein höheres Maß an Autonomie erreichen.