Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2014 (C)
Ebenfalls im Jahr 2014 wird in Santa Monica, Kalifornien,
die Firma Hoovy LLC gegründet, eine neue und innovative
Marketing-Plattform, die Drohnen verwendet, um damit Werbung zu
betreiben – effizienter und zu geringeren Kosten als jede Alternative
auf dem Markt, wie das Unternehmen behauptet.

Die Advatar genannte Drohne ist ein Oktokopter mit schlankem Design, die genügend Kraft hat, um mit großen Bannern im Himmel zu fliegen. Um eine Position auf der idealen Höhe zu ermöglichen, ist das Fluggerät mit GPS und den neuesten Sicherheitsfunktionen sowie Sensoren ausgestattet, wie z.B. einem Sensor zur Messung der Windgeschwindigkeiten in unterschiedlichen Höhen. Außerdem gibt es LED-Leisten, um das Banner nachts zu beleuchten.
Die Firma will im Juni auf Indiegogo eine Crowdfunding-Kampagne starten – doch davon ist bislang nichts zu sehen. Nach einigen allgemeinen Meldungen im Laufe des Jahres 2015 ist auch nichts Neues mehr über den fliegenden Werbeträger zu hören.
Im Juli 2014 ist die San Diego Gas & Electric (SDG&E)
der erste Stromversorger in den USA, der die Genehmigung der FAA erhält,
um Drohnen zur Inspektion von Strom-Übertragungsleitungen
und als Feuerlöschwerkzeuge zu testen.

der SDG&E
Die Firma startet umgehend ein Pilotprojekt, um mit zwei Drohnen eine mehrere Kilometer lange Strecke einer Übertragungsleitung im östlichen San Diego County zu inspizieren – in der Hoffnung damit beweisen zu können, daß Flugroboter sichere und wirksame Werkzeuge für diesen Einsatzbereich sind.
Langfristiges Ziel der Test-Flüge mit den zwei kleinen UAVs, die weniger als 0,5 kg wiegen und von der Forschungsfirma Physical Sciences Inc. aus Massachusetts gebaut worden sind, ist es, die Sicherheit und Zuverlässigkeit der Infrastruktur zu erhöhen. Doch auch die Kostenreduktion bei der Untersuchung von Stromleitungen ist ein großer Vorteil. Das gesamte System mit zwei Quadrokoptern und einem Kontrollpaneel kostet etwa 6.000 $, was äußerst günstig ist im Vergleich mit den Kosten für Hubschrauber-Überflüge, die Hunderte oder Tausende von Dollar pro Meile betragen können.
Da die Drohnen ebenso gut Gasleitungen untersuchen können, ist das Pilotprojekt ebenso für die Sempra Energy von Interesse, der Muttergesellschaft von SDG&E und Southern California Gas.

Quadrocopter
Im Juli berichtet die Presse von einer Entwicklung der Europäischen Weltraumagentur ESA,
die auf dem deutschen Airbus-Gelände bei Trauen in der Lüneburger Heide
(wo schon Eugen Sänger in den 1940er Jahren seine Raketenexperimente
durchführte) ein neuartiges System testet, um Rover sicher auf dem Mars
zu landen.
Im Rahmen des Projekts StarTiger (Space Technology Advancements by Resourceful, Targeted and Innovative Groups of Experts and Researchers) bauen die involvierten Wissenschaftler aus Deutschland, Portugal und Polen einen 40 x 40 m großen Ausschnitt der Marsoberfläche nach, komplett mit jeder Menge Steine, mit Abhängen und anderen Hindernissen, die eine sichere Landung schwer bis unmöglich machen.
Im Laufe von acht Monaten wird dann der Prototyp eines vollautomatischen Dropship Quadrocopter (oder Dropter) entwickelt, dessen Hardware weitgehend auf handelsüblichen Quadcopter-Komponenten basiert. Die noch ziemlich kleine Testversion des Dropters fliegt bis zu 17 m hoch, wird zuerst über GPS gesteuert und sucht danach selbständig nach einem sicheren Landeplatz für den mitgeführten Rover, der dann an einem 5 m langen Seil herabgelassen wird, bis er sanft am Boden aufsetzt.
Bei der relativ geringen Dichte der Mars-Atmosphäre (etwa 1,3 % des Luftdrucks auf Meeresniveau auf der Erde) bedarf die Technologie allerdings noch beträchtlicher Modifikationen – wobei die Nutzung eines Quadcopters ein angemessenes Mittel ist, um die Forschung möglichst preiswert auf der Erde durchführen zu können.
Irdischer und auch schon viel eher anwendbar ist demgegenüber eine Entwicklung
der Cornell University in Zusammenarbeit mit Forschern
vom Massachusetts Institute of Technology (MIT), bei
der Drohnen als Helfer für professionelle Fotografen eingesetzt werden.
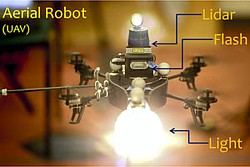
Die US-Forscher um die Informatikprofessorin Kavita Bala zeigen nämlich, daß die Fluggeräte auch bei bewegten Modellen für ein optimales Konturlicht sorgen können, was für menschliche Beleuchtungsassistenten nicht ganz leicht ist. Das von Manohar Srikanth entwickelte System basiert auf einem handelsüblichen Quadcopter (Parrot AR.Drone), der nun Litrobot getauft und zusätzlich mit Scheinwerfer, Blitzlicht und Laser-Entfernungsmesser ausgestattet wird.
Letzterer erlaubt der Drohne, in gleichbleibendem Abstand vom Modell zu schweben, wodurch auch die Beleuchtungsintensität konstant bleibt. Der Scheinwerfer dient dazu, daß der Fotograf den Beleuchtungseffekt vorab einschätzen kann, während der Blitz erst für die eigentliche Aufnahme ausgelöst wird.
Das erste soziale Netzwerk für Flugroboter-Fotografie Dronestagram,
über das ich bereits in der Jahresübersicht 2013 berichtet
habe, veranstaltet gemeinsam mit dem Magazin National Geographic einen
Fotowettbewerb, bei dem die besten Drohnenbilder gesucht werden. Gesamtsieger
im Juli 2014 ist die spektakuläre Nahaufnahme eines
Adlers im Gleitflug über dem Bali Barat Nationalpark in Indonesien.
Noch nützlicher ist ein neues Projekt des Mobile Communications Laboratory
der Eidgenössischen Technischen Hochschule in Lausanne
(EPFL), die schon mehrfach erwähnt wurde. Dabei geht es um die Entwicklung
einer Drohne, die Rettern helfen soll, Opfer von Naturkatastrophen durch
die Ortung ihrer Handys aufzuspüren, und die der Student Jonathan
Cheseaux im Zuge seines Masterstudiums konstruiert.

von Cheseaux
Nach einer Naturkatastrophe kreist die Starrflügel-Drohne über dem betroffenen Gebiet und empfängt mit zwei starken Antennen die Handysignale vom Boden. Für die Suche von Verschütteten nach einem Lawinenabgang können die Antennen auch durch Empfangsgeräte für Lawinen- Transceiver ersetzt werden, wie sie heute von vielen Wintersportlern genutzt werden. In den bislang durchgeführten Tests konnte das Fluggerät Handysignale am Boden im besten Fall allerdings nur mit einer Genauigkeit von 10 m orten, sodaß wohl noch weiterer Entwicklungsbedarf besteht.
Interessanterweise wird ebenfalls im Juli aus dem US-Bundesstaat Wisconsin berichtet, wie eine Drohne hilft, den seit 72 Stunden in der Nähe von Fitchburg verschwunden 82-jährigen Augenarzt Guillermo DeVenecia zu finden, der an Demenz leidet und nach dem bereits Polizisten, Spürhunde, ein Hubschrauber und hunderte Freiwillige suchten.
Als David Lesh davon hört, der eigentlich mit seiner Multicopter-Drohne Snowboard- und Skiscenen in Colorado filmt und nur zufällig gerade zu Besuch bei der Familie seiner Freundin ist, bietet er seine Hilfe an. Dank der Aufklärungsarbeit der Drohne findet er den Vermißten, dehydriert aber am Leben, nach nur 20 Minuten.
Es ist nicht verwunderlich, daß der Vorfall zusätzlichen Druck auf die FAA ausübt, ihre harte Politik gegenüber dem Einsatz von Drohnen zu überprüfen. Immerhin hatte die Luftfahrtbehörde der gemeinnützigen Such- und Rettungsorganisation Texas EquuSearch gerade erst eine Droh-Mail geschickt und sie gezwungen, ihre Drohnen stillzulegen. Allerdings entscheidet ein Gericht, daß die Mail keine rechtlichen Folgen hat – worauf die unbemannten Flugzeuge ihre Arbeit wieder aufnehmen.

Eine weitere Innovation im Juli ist ein Fallschirm für Drohnen mit dem
sinnigen Namen DropSafe, den die Firma DJI als
Prototyp für ihre professionellen S800 und S1000 Drohnen vorstellt.
Sobald diese aufhören zu fliegen, öffnet sich der DJI DropSafe Fallschirm automatisch, sodaß die Drohne möglichst unbeschadet landen und auch niemanden verletzen kann. Das System ist natürlich wiederverwendbar.
Besonders sinnvoll wäre eine derartige Technologie bei den geplanten Fracht-Drohnen von Simon
Scott und seiner im britischen Manchester beheimateten Firma
Cargo Unmanned Air System (UAS), die ihr Projekt im
Juli auf Kickstarter vorstellen.

Nachdem bereits eine Prototyp-Zelle ohne Flügelverkleidungen und Außenhaut gezeigt werden kann, wird nun ein Finanzierungsziel von 35.000 £ festgelegt, um eine Drohne mit 60 kg Hubkraft zu bauen.
Langfristiges Ziel der UAS sind unbemannte Fluggeräte, die Nutzlasten von bis zu 400 kg tragen können und eine automatisierte Erfassungs- und Vermeidungsfähigkeit besitzen.
Zumindest im Bereich des Crowdfunding scheint dies aber eine Dimension zu groß zu sein – denn es kommen nur klägliche 116 £ zusammen. Trotzdem scheint Scott weiterzumachen, wozu man ihm nur mehr Glück als bisher wünschen kann.

(Grafik)
Vielleicht würde ihm dabei ein so schnittiges Design helfen, wie das
schicke Konzept der Lieferdrone des Designers Alfred
Urleb aus Graz (WiGL Design), die für die schnelle und problemlose
Lieferung von zeitkritischen Artikeln wie Blutkonserven, Organe, Medikamente
usw. entworfen wurde.
Der eigentliche Lieferbehälter befindet sich auf der Unterseite. Er öffnet sich erst nach der schriftlichen Bestätigung durch Unterschrift auf dem Touchscreen. Von einer praktischen Umsetzung ist aber nichts bekannt, auch einen Prototypen scheint es noch nicht zu geben.
Ebenfalls vom Juli datiert die Meldung aus Belize, der
zufolge die nicht lizenzierte und rechtswidrige Fangtätigkeit an
der Küste des Landes seit jüngstem durch Drohnen überwacht wird. Das
Projekt wird von den Fischerei-Verwaltungen gemeinsam mit der Wildlife
Conservation Society (WCS) und der Organisation Conservation Drones durchgeführt,
die preisgünstige UAVs für Umweltschutzbemühungen entwickelt.
Ab Ende Juli zeigen Matteo Cremonesi, Fabio
Paris und Dario Bonetta von der italienischen
Künstlergruppe IOCOSE auf der Ausstellung 3030_2.0 Art
da Brescia (fiktive) Selfie-Fotografien von Drohnen.
Bei dem In Times of Peace genannten Projekt sollen sich die Menschen die Bilder ansehen und danach mehr Probleme haben, als sie bisher hatten – wünschen sich die Künstler: „Drohnen werden zur Überwachung und als Waffen genutzt. Sie bekommen in unserer Gesellschaft immer mehr Bedeutung, die aber nicht hinterfragt wird. Sobald man darüber nachdenkt, ist das ziemlich unheimlich.“
Die von Ridha Azaiz im August 2014 in
London gegründete Firma Aerial Power Ltd. bezeichnet
sich als das erste Unternehmen, das eine vollautomatische Drohnen-basierte
Methode zur Reinigung von Solarpaneelen entwickelt hat.
Neben Azaiz, einem deutschen Ingenieur der TU Berlin
und Erfinder der SolarBrush-Drohne,
für die bereits weltweit Patente eingereicht wurden, gehören zum Team
noch Matthias, ein Umweltingenieur, der Solarkraftwerke
entwirft, und Richard, ein erfahrener Schriftsteller,
Medienspezialist und Luftfahrtfachmann.
Der Hintergrund soll auch erzählt werden: Den dreizehnjährigen Ridha stört es 1997, daß er die heimische Solaranlage selber reinigen muß, weil die Energieausbeute sonst rapide abfällt. Er möchte deshalb einen Reinigungsroboter bauen, der ihm die Arbeit abnimmt. Das Tüfteln daran bringt ihn 1998 zu Jugend forscht und ins Fernsehen, 2009 nach Berlin und später sogar nach Kalifornien und Abu Dhabi.

Azaiz konzentriert sich dabei auf das Wesentliche, denn dort, wo Solarkraftwerke am sinnvollsten sind, sind das Hauptproblem Sand- und Staubablagerungen. Und während andere Roboter die Paneele absaugen oder mit Wasser und Spülmitteleinsatz waschen, bürstet sein SolarBrush Roboter den Sand und Staub solange vor sich her, bis dieser in den Montagelücken zwischen den Solarpaneelen zu Boden fällt.
Doch obwohl der Roboter in Kleinserie produziert nur rund 3.000 $, und bei größeren Stückzahlen sogar unter 2.000 $ pro Gerät kosten würde, scheint es dem Pionier der automatisierten Reinigung von Sonnenkollektoren aber trotz mehrere Preise und Auszeichnungen nicht gelungen zu sein, Investoren und Partner für den Vertrieb zu finden. Was hoffentlich mit dem nun erfolgten Schritt zu fliegenden Robotern und der Firmengründung anders wird.
Das speziell angepaßte und ebenfalls als SolarBrush bezeichnete UAV wird als effiziente, wartungsarme und umweltfreundliche Art beworben, die Effizienz von Solarparks zu erhalten. Der wasserlose Reinigungsprozeß sei zudem schnell, flexibel und kostengünstig. So läßt sich eine komplette Solarfarm von einer einzigen Basisstation aus reinigen, ohne daß man Reinigungsgeräte manuell zwischen den Kollektorreihen hin und her bewegen muß. Der einzige Teil der SolarBrush, der die Solarzellenoberflächen berührt, ist der speziell entwickelte Reinigungsschwanz.
Studien in den VAE zeigten, daß die Leistung der Anlagen um bis zu 35 % sinken kann, wenn sie für einen Monat ungereinigt bleiben – und um bis zu 80 % nach einem Sandsturm. In der Rajasthan-Wüste stellen die Reinigungskosten bis zu 60 % der Betriebskosten dar. Abhängig von der Region, in der die Drohnen eingesetzt werden, soll es mit der neuen Technik möglich sein, die Kosten für die Reinigung der Solarpaneele um bis zu 70 % zu senken und gleichzeitig die Energieproduktion um bis zu 30 % im Monat zu erhöhen. Basierend auf einer Drohne, die ein 1 MW Kraftwerk bedient und jedes Paneel alle vier Tage reinigt, werden sogar Einsparungen von bis zu 80 % berechnet.
Der Firma zufolge wird das Gerät aktuell bei mehreren Kraftwerken getestet, darunter auch bei einer 25 MW Solarfarm in Chiles Atacama-Wüste. Anschließend will man das Produkt an die Hersteller von Solarzellen und an Distributoren lizenzieren. Doch auch dies scheint nicht so schnell vorwärts zu gehen, denn Neuigkeiten gibt es erst wieder im Jahr 2016, als Aerial Power im August in Indien mit mehreren Unternehmen vereinbart, die SolarBrush UAVs zu testen. Im September meldet die Firma, daß sie erfolgreich ein vom 7. Rahmenprogramm der Europäischen Kommission finanziertes Projekt durchgeführt habe, bei dem die Entwicklung der SolarBrush UAV vorangetrieben und F&E-Aktivitäten auf mehreren internationalen Märkten durchgeführt werden konnte. Details darüber sind bislang nicht zu finden.
Das Thema der Reinigung von PV-Paneelen wird in einem entsprechenden Schwerpunkt im Kapitelteil Entwicklung der photovoltaischen Nutzung umfassend dokumentiert (s.d.).
Im August berichtet die Presse von speziellen Roboter-Greifvögeln, die Nico
Nijenhuis und seine Firma Clear Flight Solutions aus
Enschede in den Niederlanden entwickelt haben, ein Spin-off der Universität
Twente.

Die flügelschlagenden und mit ihren großen Augen und spitzen Schnäbeln äußerst lebensecht wirkenden Robirds ähneln einem Wanderfalken bzw. einem Weißkopfseeadler, sind aber aus einem leichten und robusten Glasfaser-Nylon-Verbundwerkstoff hergestellt, ferngesteuert und batteriebetrieben.
Der Einsatz der künstlichen Raubvögel aus dem 3D-Drucker soll im Umfeld von Flughäfen, während der Aussaat von Getreide oder auf Mülldeponien erfolgen – also in und um jene Problembereiche, in denen das Vertreiben (natürlicher) Vögel erwünscht ist. Dabei wird der natürliche Fluchtinstinkt der Tiere genutzt, welche Raubvögel insbesondere durch deren Silhouette und Flügelbewegung erkennen.
Das Wanderfalken-Modell mit einer Körperlänge von bis zu 58 cm und einer Spannweite von 120 cm ist in der der Lage eine Geschwindigkeit von 80 km/h zu erreichen und wurde entwickelt, um eine abschreckende Wirkung auf Vögel mit einem Gewicht von bis zu 3 kg zu haben, während das fast doppelt so lange Adler-Modell mit einer Spannweite von bis zu 220 cm noch einschüchternder wird und so gut wie jede Art von Vogel verjagen kann.
Die Entwicklungen und Tests sollen bis Mitte des Folgejahres weitergeführt werden, wobei auch geplant ist, die Robirds autonomer zu machen. Was erfolgsversprechend zu sein scheint, denn im März 2015 investiert der US-basierte Cottonwood Euro Technology Fund 1,6 Mio. € in Clear Flight Solutions. Was sicherlich gut angelegtes Geld ist, denn der materielle Schaden auf Flughäfen, der jährlich durch Vogelschlag entsteht, soll sich weltweit gerechnet auf mehrere Milliarden Euro aufsummieren.
Bei meiner Recherche stellte ich allerdings fest, daß die Robirds tatsächlich bereits im Jahr 2011 von der ebenfalls niederländischen Firma Green X entwickelt worden waren – und während der UAS 2011 Konferenz in Paris sogar einen Innovationspreis einheimsen konnten.
Im Mai 2017 folgt die Meldung, daß der kanadische Flughafen Edmonton Airport, der jährlich etwa 168.000 Flüge bewältigt und bislang Laser und Aufnahmen von Raubvogelrufen nutzt, um Vögel abzuschrecken, im Juni als weltweit erster Flughafen den mit seinen Flügeln flatternden Robird in Dienst stellen wird. Die Dienstleistung wird von der in Calgary beheimateten Firma AERIUM Analytics Inc. erbracht.
Dieselbe Idee begegnet uns im August 2018 wieder, als
eine Gruppe von Forschern des California Institute of Technology (CalTech)
um Soon-Jo Chung darüber berichtet, daß sie an einem
Algorithmus arbeiten, mit dem autonome Drohnen Vogelschwärme von kritischen
Orten wie Flughäfen vertreiben können, ohne sie aufzuschrecken. Wie wichtig
das ist, belegen zwei aktuelle Zahlen: Im Jahr 2016 gab
es allein in Großbritannien 1.835 bestätigte Vogelschläge, während ebensolche
die Fluggesellschaften in Nordamerika schätzungsweise 500 Mio. $ pro
Jahr kosten.
Um die Tiere von den Enden der Start- und Landebahnen fernhalten, nutzen die Entwickler, zu denen auch Wissenschaftler des Imperial College London und des Korea Advanced Institute of Science and Technology (KAIST) gehören, das Schwarmverhalten der Tiere, indem sie sie von intelligenten Drohnen wie von einem Hütehund leiten lassen. Das Team modifiziert hierzu einen Algorithmus, der üblicherweise zum Zusammentreiben von Schafen benutzt wird, und paßt ihn an die Dynamik eines fliegenden Vogelschwarms an.
Mit dieser Methode lassen sich die Vögel nämlich in großer Zahl gezielt abdrängen – zumindest dann, wenn die Drohnen genau die richtige Position finden: Zu weit weg reagieren die Tiere nicht auf den Eindringling im Luftraum, zu nah dran geraten sie in Panik und der Schwarm zerstreut sich. In der korrekten Distanz lassen sich die Vögel hingegen mit einer oder mehreren Drohnen in ihren Flugbewegungen so lenken, daß sie den Jets nicht mehr in die Quere kommen. Das soll die Sicherheit von erhöhen, und außerdem kann dadurch das Leben vieler Vögel gerettet werden.
Bisherige Lösungsansätze waren aus Kostengründen schwer auf größere Flächen anzuwenden: Manuell geflogene Drohnen sind teuer im Betrieb und der Einsatz von Greifvögeln zur Abschreckung ist zwar effektiv, funktioniert aber nur sehr lokal und es gibt im Zweifelsfall nicht genug Falkner. Mit den autonomen Drohnen könnte sich hingegen auch ein größerer Luftraum automatisiert schützen lassen.
Getestet wird die Erfindung mit zwei Drohnen nahe der südkoreanischen Stadt Daejeon – ein Flugapparat verjagt Vögel, während der zweite viel höher fliegt und die Geschwindigkeit und die Flugrouten der Vögel überwacht. Sollten auch die weiteren Tests erfolgreich verlaufen, könnte diese Technologie zum weltweiten Standard auf Flughäfen werden.
Grünes Licht der FAA gibt es im August auch für ein Testgelände am
Flughafen von Rome nördlich von New York City, wo Forscher mit einem
ferngesteuerten Kleinstflugzeug mit einer Spannweite von 1,20 m prüfen
wollen, wie sich unbemannte Flugzeuge in der Landwirtschaft einsetzen
lassen. Unter anderem geht es dabei um die Erfassung von Insekten, Unkraut,
Schädlingen, Getreide- und Boden-Eigenschaften sowie um eine Quantifizierung
der Biomasse. Weitere Testgelände werden in Nevada, North Dakota und
Texas zugelassen.
Die FAA will bis zum Jahresende die Kriterien zumindest für Drohnen bis zu 25 kg Gewicht erarbeiten. Daß die Genehmigungen auf Flüge während der Tagesstunden, nicht höher als ca. 150 m, nicht schneller als 160 km/h und innerhalb der Sichtlinie des Piloten begrenzt werden sollen, ist allerdings ebenso unrealistisch wie die Forderung, daß der Drohnenbetreiber eine Pilotenlizenz besitzen muß. Und nicht etwa eine spezielle für Drohnen, sondern eine Standardlizenz wie man sie braucht, um tatsächlich ein Flugzeug zu fliegen. Der Entwurf für die gesetzliche Regelung wird schließlich im Februar 2015 vorgelegt. Anschließend will man Änderungsanträge abwarten und hofft, bis 2017 ein Gesetz ratifizieren zu können (mehr dazu unter Regelungen).
Eine Lösung tut jedenfalls Not. Denn nicht alle warten ab. Martin Scorsese beispielsweise hatte schon im Vorjahr seinen Film ,The Wolf of Wall Street’ zum Teil unter Einsatz von Drohnen gefilmt – einfach ohne Genehmigung.
Tatsächlich erteilt die FAA dann im September sechs Filmstudios in Hollywood eine Ausnahmegenehmigung für die Nutzung von Drohnen, die allerdings keine sogenannte ,no-go’- Zonen überfliegen dürfen und einem Nachtflug- und -filmverbot unterliegen. Zudem müssen die Drohnen-Führer im Besitz eines Pilotenscheins sein. Trotz dieser Einschränkungen warten bereits weitere 40 Filmstudios auf eine Genehmigung.
Auf der anderen Seite meldet die Luftfahrtbehörde im November, daß sie jeden Monat etwa 25 Berichte von Drohnen erhalte, die in der Nähe von Flugzeugen auftauchen und damit zunehmend zum Sicherheitsrisiko werden.
Im Dezember folgen dann noch Ausnahmegenehmigungen für die vier Unternehmen Trimble Navigation Ltd., VDOS Global LLC, Clayco Inc. und Woolpert Inc., die mit ihren unbemannten Fluggeräten in den Bereichen Luftvermessung, Baustellenüberwachung und Inspektionen von Bohrinsel-Fackeln aktiv werden wollen – und es nun auch dürfen, allerdings nur im Rahmen der Sichtweite und mit Drohnen unterhalb von 25 kg Gewicht.
Hilfreich für die Gesamtentwicklung könnte sich das Projekt eines Flugverkehrskontrollsystems für unbemannte Fluggeräte erweisen, das von der NASA gemeinsam mit dem in San Francisco beheimateten Start-up Airware erarbeitet wird. Die NASA prognostiziert, daß schon im Jahre 2018 ca. 7.500 Drohnen mit einem Gewicht von 25 kg über den Köpfen der US-Bürger fliegen werden.
Um Chaos im Luftraum urbaner Gebiete zu vermeiden, besteht das neue Airware-System aus zwei Phasen. Zunächst senden Drohnen Informationen an eine Hautpzentrale, die automatisch eine Flugerlaubnis erteilt oder nicht, basierend auf bekannten Informationen von anderen Drohnen sowie Wettervorhersagen. Dies soll vor allem dazu dienen, Flugdronen von Amazon und anderen Anbietern in dem selben Areal vor Kollisionen zu schützen und die Flugräume gerecht aufzuteilen.
Die zweite Phase beinhaltet die Steuerung der Drohnen selbst, jedenfalls zum Teil, denn in Zukunft sollen alle Drohnen eine Hintertür haben um sie bei Bedarf automatisch umzuleiten oder erst gar nicht starten zu lassen. Airware will Ende des Jahres mit Tests beginnen, die alle möglichen Drohnen, von kleinen bis großen, aber auch Helikopter und Modellflugzeuge umfassen. Wie groß das Interesse ist bestätigt sich, als die erst drei Jahre alte Firma im Juli 2014 in einer Finanzierungsrunde B 25 Mio. $ einnehmen kann, die nun verwendet werden sollen, um neue Mitarbeiter für die noch in diesem Jahr geplante Markteinführung einzustellen.
In der Finanzierungsrunde A im Jahr 2013 hatte es bereits 12,2 Mio. $ von Andreessen Horowitz, Google Ventures, First Round Capital und Felicis Ventures gegeben. Diesmal wird die Runde der Finanziers von Kleiner Perkins Caulfield & Byers angeführt. Daneben hatte sich Airware an einem Feldtest beteiligt, bei dem die UAVs im Oj Pejeta Schutzgebiet in Kenia gefährdete Nashörner schützen sollen.
Für solche Pioniere ist die Situation in den USA sicherlich nur schwer erträglich, haben sie doch in der Gestalt von Kanada den genauen Gegenentwurf vor Augen. Dort kann nämlich jeder, der eine Drohne für kommerzielle Zwecke nutzen will, bei der Luftfahrtbehörde die entsprechende Erlaubnis beantragen, welche in den meisten Fällen auch innerhalb von 10 - 20 Werktagen erteilt wird.
Kanadas Entscheidung, der kommerziellen Nutzung von Drohnen grünes Licht zu geben, erfolgte bereits 2010, als die Regierung die Dimension einer aufstrebenden Luftfahrt-basierten Wirtschaft erkannte. Das Fazit ist, daß es in Kanada inzwischen schon Hunderte von Unternehmen und Institutionen gibt, die Drohnen zu einem Teil ihres Tagesgeschäfts gemacht haben und diese in Branchen wie der Landwirtschaft und bei TV-Dreharbeiten einsetzen. In den vergangenen drei Jahren hat die Regierung fast 1.500 ,Special Flight Operations Certificates’ erteilt, darunter 945 Stück allein im Jahr 2013.

bei Airware
Was das erwähnte, im Jahr 2011 von Jonathan
Downey in Newport Beach, Kalifornien, gegründete und später
nach San Francisco gezogene Startup Airware anbelangt
(damals: Unmanned Innovation Inc.), so entwickelte dieses zunächst ein
Autopilot-System zur Programmierung von Drohnen, die bestimmten Routen
folgen, um Daten zu sammeln.
Dabei konzentrierte man sich auf den Bau von Starrflügel-Drohnen für kommerzielle Zwecke. Es gelingt Airware, große Beträge an Risikokapital von Google Ventures, Intel Capital, GE Ventures und anderen einwerben.
Noch 2016 erwirbt die Firma ein Softwareunternehmen für Drohnenanalysen namens Redbird, doch im September 2018 gibt die Airware bekannt, daß sie den Betrieb mit sofortiger Wirkung einstellt – nachdem sie 118 Mio. $ ‚verbrannt hat‘. Als Begründung wird angeführt, daß dem Startup das Geld ausging, nachdem es versucht hatte, seine eigene Hardware herzustellen, einen Multi-Rotor namens AT-28 und eine Starrflügelflugzeug namens Cygnet, die aber nicht mit Drohnengiganten wie Chinas DJI konkurrieren konnte.
Im August 2014 wird berichtet, daß eine Drohne außerhalb
der Mauern des Hochsicherheits-Gefängnis Lee Correctional Institution
in Bishopville, South Carolina, abgestürzt sei – bei
dem Versuch, damit Handys, Marihuana und Tabak hinein zu schmuggeln.
Bislang wurden dazu eher Katapulte benutzt.

Im Gleichen Monat stellen Studenten der belgischen Katholischen
Universität Leuven (KUL) den Prototyp einer Drohne vor, die
wie ein Quadcopter senkrecht startet und landet, aber dann um 90° kippt,
um in sehr viel effizienterer Flugzeugmanier als Starrflügler größere
Strecken zurückzulegen.
Der Flieger namens VertiKUL, der im Rahmen einer Masterprüfung im Fach Ingenieurswissenschaften entwickelt wird, kann bereits eine Nutzlast von einem Kilogramm 30 km weit transportieren. Außerdem konnten durch den Einsatz von GPS sowohl der Landeanflug als auch die eigentliche Landung automatisiert werden. Einem kommerziellen Drohnenflug steht allerdings momentan noch die Gesetzeslage in Belgien im Weg.
Über dieses Projekt ist erst wieder im September 2015 etwas zu hören, als die Forscher aus Belgien eine weiterentwickelte Version namens VertiKUL 2 vorstellen. Das neue Modell wiegt 5 kg, erreicht eine Fluggeschwindigkeit von 60 – 70 km/h und kann in einer 20 x 15 x 10 cm großen Ladebucht eine Nutzlast von ebenfalls 1 kg tragen.

Da bei den vorherigen Modell festgestellt worden war, daß das Fliegen unter windigen Bedingungen und vor allem die automatisierten Landungen schwierig sind, entschließen sich die Wissenschaftler, den Luftwiderstand des UAV zu verringern, indem sie die Flügelgröße reduzieren. Und da es wegen des Übergangs vom senkrechten Start zum waagrechten Vorwärtsflug schwer war, ein Fahrwerk für die Landung auf einer ebenen Fläche zu installieren, startet und landet die Drohne nun auf einer geneigten Fläche, oder schräg an eine Schachtel gelehnt.
Gleichzeitig wird der Rumpf so gestaltet, daß er beim Flug für einen Teil des Auftriebs sorgt, während der Rest von den Propellern produziert wird, die jetzt in einem Winkel von 45° in Bezug auf die Flugrichtung arbeiten. Das Ergebnis ist ein sehr windverträgliches, effizientes und schnelles Multirotor-Fluggerät, das bei Tests eine Reichweite von 30 km erzielt.
Die Idee, daß Hütehund-Roboter Menschen aus Paniksituationen
retten könnten, veranlaßt Biologen um Andrew King von
der Swansea-Universität in Wales, das Hüteverhalten
von Hunden bei Schafsherden zu untersuchen, wofür sie eine Herde von
46 Schafen mit besonders exakten GPS-Empfängern ausstatten und sie von
einem australischen Hütehund treiben lassen.
Aus den Bewegungsdaten entwickelt der Mathematiker Daniel Strömbom von der Universität Uppsala in Schweden einen simplen Algorithmus, der auf zwei einfachen Regeln basiert, damit die Herde zusammenbleibt: Da die Hunde die Schafe nur als weiße Schemen erkennen, erscheinen ihnen Lücken zwischen den einzelnen Tieren dunkler. Wird der Abstand zwischen weißen Flecken zu groß, beginnen die Hunde die Herde zu umkreisen und wieder zusammenzutreiben. Sobald die Hunde die Herde wieder als durchgehend weiß wahrnehmen, treiben sie die Schafe in Richtung Ziel.
Der Algorithmus soll sich auch in der Luft einsetzen lassen. So zum Beispiel bei Drohnen, die Umweltdaten sammeln und für ihre Rückkehr einprogrammierte Ziele haben. Das ist zwar eine zusätzliche Information für die Drohne, aber auch eine mögliche Fehlerquelle. Insofern könnte eine mit dem neuen Algorithmus programmierte Schäferdrohne mehrere andere Drohnen bewachen und sicher nach Hause bringen.
Ein weiterer Algorithmus, über den in diesem Monat berichtet wird, stammt
aus dem MIT und läßt Lieferdrohnen ihre
eigene ,Gesundheit’ in Echtzeit überwachen – denn um eine sichere,
zeitnahe und präzise Lieferung zu gewährleisten, müssen Drohnen mit
gewissen Unsicherheitsfaktoren wie starken Winden, Sensormeßfehlern
oder einem Abfall der Energie umgehen können.
Bei dem zweigleisigen Ansatz werden die Berechnungen, die mit langen Liefermissionen verbunden sind, deutlich reduziert. Mit dem Selbstüberwachungs-Algorithmus kann die Drohne ihr Energielevel, den Zustand der Rotoren, Kameras und anderen Sensoren während der gesamten Mission vorhersagen und wenn nötig proaktive Maßnahmen ergreifen – zum Beispiel einen Umweg zu einer Ladestation nehmen. Daneben wird ein Verfahren entwickelt, das es der Drohne erlaubt ihre möglichen zukünftigen Positionen offline zu berechnen, bevor sie abhebt, was die Auswahl der möglichen Routen vereinfacht, die sie nehmen kann, um ein Ziel ohne Hindernisse zu erreichen.

Und damit Drohnen auch selbständig auf sich bewegenden, unbemannten Bodenfahrzeugen
landen können, erarbeiten Forscher am WAVE Lab der University
of Waterloo in Kanada eine koordinierte Kontrollstrategie
für das autonome Docking.
Mit dem mobilen Aufladen von Dronen kann die Reichweite der unbemannten fliegenden Roboter um das doppelte erhöht werden, und die mobilen Ladestationen können neben der Energie auch noch eine Menge anderes Material mit sich führen. Die Experimente mit einem kleinen Prototypen erweisen sich jedenfalls als vielversprechend.

Das Drone-Mapping von Korallenriffen und der Küstenregion
in erweiterter Form praktiziert der Marinebiologe Steve Schill in
Haiti. Wie im August 2014 gemeldet wird, setzt dieser
einen amphibischen Quadrokopter ein, um die küstenökologischen Bedingungen
einzufangen und die Genauigkeit der Satellitenabbildungen zu überprüfen.
Schill hatte seinen Studenten Jordan Mitchell mit dem Bau beauftragt und ihm ein Budget von 2.000 $ vorgegeben. Es gelingt Jordan, die Drohne in weniger als einem Monat zu entwerfen, zu bauen und erfolgreich zu testen.

auf dem Wasser
Mit einem Gewicht von nur knapp 2,5 kg hat ,Henri’ (benannt nach dem König von Nord-Haiti im frühen 19. Jahrhundert) einen robusten, schwimmfähigen Rahmen, eine hochauflösende GoPro-Kamera, einem GPS-fähigen Autopilot-Chip und andere Navigationselektronik, die innerhalb eines umgedrehten Tupperware-Behälters steckt,der als vollkommenes wasserdichtes Gehäuse dient.
Henri kann manuell über die Fernbedienung geführt werden oder autonom entlang eines vorprogrammierten Weges fliegen. Zwischendurch landet der kleine und wendige Kopter sanft und leise auf dem Wasser. Nach einiger Zeit hebt er wieder ab, kreist in 75 m Höhe und fliegt weiter. Dazwischen macht er Unterwasser-Videos, um die ökologische Bedingungen zu dokumentieren.
Im August wird ein Patentantrag von Disney veröffentlicht,
der darauf hindeutet, daß das Unternehmen künftig bei Paraden in Freizeitparks
Drohnen einsetzen will, um mit diesen Riesenpuppen zu
steuern (US-Nr. 20140231590, angemeldet 2013, vgl. US-Nr.
8.876.571, erteilt November 2014). Den Machern der neuen
Shows ist es wichtig, daß die Charaktere der Geschichten fliegen können,
schließlich heben diese auch innerhalb der Erzählungen regelmäßig ab.
Die Drohnen sollen demnach über den bis zu 30 m hohen Figuren wie Puppenspieler feste Positionen in der Luft einnehmen und mit Drähten die einzelnen Körperteile bewegen. Dank der programmierten Schwarm-Intelligenz können damit sogar Laufbewegungen, Sprünge und ähnliche Aktionen realisiert werden.

Cirque Du Soleil
Doch auch hier hat Kanada die Nase vorn, denn bereits im September wird
über die neueste Aufführung des Cirque Du Soleil berichtet
– bei der zwar keine Puppen, dafür aber mit leuchtenden Lampenschirmen
bestückte Drohnen in der Luft tanzen. Was den begeisterten Presseberichten
zufolge ziemlich beeindruckend ist.
Davon kann man sich auch selbst ein Bild machen, denn in dem gemeinsam mit Verity Studios geschaffenen Kurzfilm ,SPARKED: A Live Interaction Between Humans and Quadcopters’ wird die Geschichte eines Lampenmachers erzählt, dessen Lampenschirme sich selbständig machen und ihm im wahrsten Sinne des Wortes auf der Nase herumtanzen. Wer sich näher für die Technik dahinter interessiert, kann sich auch das Making-of-Video ,SPARKED: Behind the Technology’ anschauen, das ebenfalls im Netz zu finden ist.
Die Verity Studios, eines der führenden Unternehmen für Unterhaltungsdrohnen, wurden übrigens von Raffaello D’Andrea gegründet, der u.a. Mitbegründer von Kiva Systems war, einem Unternehmen, das 2012 von Amazon übernommen wurde und seitdem als Amazon Robotics fungiert. Technische Hilfe bei den computergesteuerten Indoor-Quadrokoptern bekommt die Firma von der ETH Zürich. Für die Zukunft ist geplant, weitere Drohnen in den Schwarm zu integrieren, um komplexere Choreographien zu realisieren und auch auf Außenräume auszudehnen.

Ebenfalls im August kursiert die Meldung, daß nun auch Google mitten
in den Outbacks von Australien unter dem Projektnamen Wing einen
Feldversuch durchführt, um Kunden mittels Drohnen zu beliefern.
Dabei testet Google, wie sich fernab von allen Supermärkten und sogar von Zugangsstraßen ein Erste-Hilfe-Set, Wasser, Schokoriegel, Hundefutter oder ähnliches ausliefern lassen. Dazu besitzen die Fluggeräte des Forschungslabors Google X ein kleines Behältnis, das sie genau über dem Zielort herunterlassen. Sobald das Produkt abgehängt wird, zieht die Seilwinde die Schnur wieder ein und die Maschine fliegt heim.
Die Drohnen, die in einem Video von den Testflügen zu sehen sind, wirken wie kleine Flugzeuge mit vier Propelleren, sind etwa 100 cm breit und 80 cm hoch. Ihre Nutzlast beträgt 1,2 kg. Sie stehen am Boden auf dem Heck, starten senkrecht und gehen dann in den Horizontalflug über. Google arbeitet bereits seit zwei Jahren insgeheim an diesem Projekt.
Auch das australische Startups Flirtey, das bereits
im Oktober 2013 in die Presse kam, als es damit begann
Bestellungen von Studenten entgegenzunehmen um ihnen die bestellten Lehrbücher
binnen weniger Minuten nach Hause zu liefern, ist in diesem August wieder
präsent.

Das Unternehmen hat inzwischen fast zwölf Monate lang High-Tech-Tests an der University of Nevada in Reno durchgeführt und will nun Neuseeland als weitere Testumgebung nutzen, das die liberalsten Luftfahrtgesetze der Welt hat, und sich dabei auf Hauptbereiche der Entwicklung konzentrieren: Sicherheit, Reichweite und Nutzlast.
Neben der Luftfahrtbehörde gibt es in Neuseeland die AirShare, ein Hub für UAVs, das nach Wegen sucht, um kommerzielle Drohnen mit anderen Flugzeugen zu integrieren. AirShare setzt sich für eine Reihe von strengen Regeln für fliegende Drohnen ein, darunter eine maximale Flughöhe von 122 m (400 Fuß), keine Nachtflüge, nur in Sichtlinie und nicht innerhalb eines Umkreises von 4 km von einem Flugplatz. Außerdem sollen die von Drohnen-Piloten angemeldeten Flugrouten gesammelt und für die traditionelle Flugsicherung sichtbar gemacht werden.
In Bezug auf Fracht-Drohnen gibt es in diesem Monat aber auch Neuigkeiten
aus Deutschland, denn die DHL - seit 2002 als DHL
International GmbH zum Konzern Deutsche Post DHL Group gehörig
-, kündigt den Start eines weltweit einzigartigen Pilotprojekts auf
der Nordseeinsel Juist an, wo erstmals Medikamente
oder andere dringend benötigte Güter zu bestimmten Uhrzeiten per DHL
Paketkopter transportiert werden. Die verantwortliche Deutsche Post
AG hatte bereits im Dezember des Vorjahres einen ersten, vier Tage
langen Test in Bonn durchgeführt.

Inzwischen ist der DHL Paketkopter für den neuen Anwendungsfall weiterentwickelt und seine Flugdauer, Flugreichweite und Geschwindigkeit weiter optimiert worden, um den speziellen Herausforderungen wie Wind und Seewetter an der Nordseeküste gerecht zu werden.
Der elektrische Quadcopter selbst wiegt unter 5 kg und kann eine Nutzlast von bis zu 1,2 kg tragen. Die maximale Flugdauer beträgt 45 Minuten. Bis zur Insel Juist legt er rund 12 km für einen Weg zurück, wobei der Flug erstmals vollständig autonom stattfindet. In einer Flughöhe von ca. 50 m legt der Kopter je nach Wind bis zu 18 m pro Sekunde zurück. Und damit die Ware beim Transport optimal gesichert ist, gibt es einen speziellen Lufttransportbehälter, der extrem leicht sowie wetter- und wasserfest ist.
Für das Paketkopter-Forschungsprojekt, das gemeinsam mit dem Institut für Flugsystemdynamik der Rheinisch-Westfälischen Technischen Hochschule Aachen (RWTH) und der Firma Microdrones GmbH verfolgt wird, richtet das Bundesministerium für Verkehr und digitale Infrastruktur in Abstimmung mit der Deutschen Flugsicherung (DFS) ein exklusives Flugbeschränkungsgebiet ein, womit es zum bisher ersten Mal in Europa möglich wird, ein unbemanntes Luftfahrzeug ohne direkten Sichtkontakt eines Piloten in einem echten Anwendungsfall zu betreiben. Auch die Inselgemeinde Juist, die Stadt Norden und die Nationalparkverwaltung Niedersächsisches Wattenmeer genehmigen den Einsatz des Kopters.
Nachdem die DHL-Paketdrohne zwischen September und Mitte Dezember 2014 bei dem Feldversuch Medikamente von der niedersächsischen Hafenstadt Norden zu einer Apotheke auf Juist transportiert, macht sie eine Winterpause, während die Flugdaten an der RWTH ausgewertet werden.
Die knapp 40 Flüge vom Festland zur Insel verliefen jedenfalls störungsfrei, auch bei Dunkelheit, Regen und Nebel. Wie das Pilotprojekt weitergeht, steht noch nicht fest, auch konkrete Pläne für einen Regelbetrieb von DHL-Paketkoptern gibt es noch nicht.
Ebenfalls im August wird aus Australien berichtet, daß Forscher der staatlichen
Forschungsbehörde Commonwealth Scientific and Industrial Research
Organisation (CSIRO) eine Lösung für das Problem der Übergriffe invasiver
Pflanzen gefunden haben, die eine Bedrohung für die einheimische
Flora darstellen.
Die Dichte der tropischen Regenwälder im hohen Norden Australiens und ihre Unzugänglichkeit für Menschen macht die Überwachung der Region zu einer schwierigen und zeitraubenden Aufgabe. Mit den beiden autonomen Mini-Hubschraubern des Projekts ResQu, die im Laufe von zwei Jahren entwickelt worden sind, gelingt es den Naturschützern demgegenüber, gefährliche Eindringlinge wie die aggressive Purpurpest (Miconia Calvescens) leicht aus der Luft zu erkennen und Maßnahmen einzuleiten, um die biologische Invasion zu stoppen. Gefördert wird das Projekt durch den Bundesstaat Queensland und der Ersteinsatz erfolgt in der Umgebung der Kleinstadt El Arish südlich von Caims.

Im September kursieren in den Fachblogs die ersten Meldungen über den 3D
Pocketcopter von Thomas Pagel, ein winziges
Fluggerät für die Hosentasche, das hochauflösende Videos aufnehmen kann
– und möglicherweise sogar die kleinste fliegende Kamera der Welt ist.
Sofern es tatsächlich gebaut wird, denn das Projekt steht erst einmal
auf der Crowdfunding-Plattform Indiegogo.
Der Mikrocopter ist rund 19 cm lang und hat einen Durchmesser von 3,5 cm. Im Inneren des Zylinders befinden sich der Akku, eine 3D-fähige HD-Kamera sowie ein Wi-Fi-Modul, zu dem man über ein Smartphone oder Tablet mit iOS, Android oder Windows Phone Kontakt hält. Via Touchscreen kann in alle Richtungen navigiert werden.
Die Idee kommt offenbar sehr gut an, denn statt der erhofften 15.000 € kommen in nur einem Monat satte 113.927 € zusammen. Womit einer Realisierung eigentlich nichts mehr im Wege stehen sollte. Versprochen wird zumindest, daß der Pocketcopter ab Mai 2015 in Blau, Schwarz und Gelb erhältlich sein wird – zu einem Preis von 89 €.

Ein weiterer Bericht im September stammt aus der University of
Virginia, wo Forscher um David Sheffler im
Auftrag des US-Verteidigungsministeriums in dreijähriger Arbeit eine
flugfähige Drohne entwickelt haben, deren Bestandteile alle aus einem
3D-Drucker stammen.
Der Entwicklungsprozeß beginnt mit einem ersten Prototyp aus Balsaholz, das viel leichter und robuster ist als der im 3D-Druck üblicherweise verwendete Kunststoff, der im Vergleich fünfmal schwerer ist, und endet im dritten Versuch bei einem Nurflügelgerät, das den Namen Razor erhält und aus neun Elementen besteht, die wie Legosteine zusammengesteckt werden. Der besondere Vorteil dieser Herstellungsweise: Stürzt das Gerät ab oder müssen bestimmte Details in der Konstruktion verändert werden, können die Komponenten einfach neu ausgedruckt werden.
Die Drohne mit einer Spannweite von 120 cm wird von einem aufmontierten Jet-Triebwerk angetrieben, ihre Nutzlast liegt derzeit bei anderthalb Pfund. Die Materialkosten belaufen sich dabei auf gerade einmal 800 $, die benötigte Elektronik kostet noch einmal 2.500 $. Für ein militärisch motiviertes Projekt ist das ausgesprochen günstig.
In diesem Monate wird ein Mann verhaftet, der in Nähe der Brooklyn Bridge
in New York ungenehmigt eine Drohne fliegen läßt.
Später in derselben Woche trifft dasselbe Schicksal einen Filmemacher,
dessen Fluggerät während des US Open außerhalb des Nationalen Tenniszentrums
in der Luft herumkurvt.
Weiter mit den Elektro- und Solarfluggeräten...