Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2016 (E)
Technologische Entwicklungen (Fortsetzung)
Im März 2016 stellt ein Team des Department of Aeronautics and
Astronautics der Stanford University den Quadrokopter AgileQuad vor,
der auf alle möglichen Objekte reagieren und mit hoher Geschwindigkeit
Ausweichmanöver fliegen kann. In einem YouTube-Video verdeutlicht das
Team dies durch gegen die Drohne geführten Degenstöße.

Ebenfalls im März 2016 wird über das Projekt Hyperion berichtet,
das die University of Oxford zusammen mit der Airbus
Group von Anfang 2013 bis zum August 2015 verfolgt
hat. Da Laserstrahlen hochleistungsfähige Kommunikationsdatenverbindungen
zwischen Bodenstationen und UAVs, Flugzeugen oder Satelliten bereitstellen
können, arbeiteten die Forscher daran, eine sichere Verbindung zwischen
einer Bodenstation und einer Drohne herzustellen und konnten nun ein
Proof-of-Concept-System mit einer Reichweite von etwa 1 km erfolgreich
testen.
Als Grund dafür, Laser anstelle von normalem Funk zu benutzen, liegt in dem exponentiellen Anstieg von UAVs zusammen mit einer zunehmenden Anzahl von Satelliten und Flugzeugen, was eine kaum zu bewältigende Nachfrage nach Datenkommunikation – und damit eine extreme Belastung der Funkfrequenzbandbreite erzeugt. Hyperion ist eines von vielen neuen Projekten, die auf der Nutzung von Free Space Optical (FSO)-Kommunikationssystemen basieren, die gerichtetes sichtbares oder unsichtbares Licht eines Lasers verwenden, um eine für Störungen weniger anfällige Datenverbindung herzustellen.
Neben der Herausforderung, Verbindungen mit brauchbarer Reichweite zu entwickeln, die mit variablen Wetter- und atmosphärischen Bedingungen umgehen können, muß der Laser auch zielgerichtet gehalten werden, da er auf der Sichtlinie beruht. Hierbei konzentrierte sich das Airbus/Oxford-Team auf die Methode, den Laserstrahl mit Hilfe eines Hologramms zu lenken und mittels der sogenannten retroreflektierenden Technologie mit geringer Leistung eine augensichere Datenverbindung herzustellen.
Das optische Hyperion-System zielt auf einen Laser mit einer Wellenlänge von 1.550 nm, weil Licht dieser Wellenlänge nicht auf die menschliche Netzhaut fokussiert und damit augensicher ist. Das System könnte bis 2019 reif genug für den kommerziellen Einsatz sein. Es gibt allerdings keine Informationen darüber, wer das Projekt nach seinem offiziellen Ende weiterführt.
Im April berichten die Fachblogs darüber, daß an der dänischen Universität
Aalborg jüngst ein ganzes Labor für die Prüfung und Erforschung
von Drohnen-Technologien aufgebaut worden ist. Unter anderen wird untersucht,
wie viel Schaden die rotierenden Propeller der Drohnen Menschen zufügen
können, um dies in Zukunft sicherer zu machen.
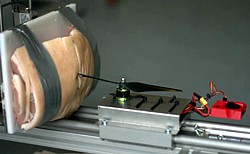
Hierfür werden auf einem fast 3 m langen Prüfstand Drohnen gegen feststehende Objekte gefahren (z.B. ein roher Schweinebraten). Der Schlitten wird von einem Elektromotor gezogen und kann eine 1 kg schwere Drohne auf bis zu 15 m/s beschleunigen, was einer Geschwindigkeit von ca. 54 km/h entspricht.
Der Aufprall wird von einer Hochgeschwindigkeitskamera mit 3.000 Bildern pro Sekunde erfaßt, was den Forschern zu verfolgen erlaubt, wie tief die Propellerblätter in das Fleisch eindringen, aber auch, wie sie sich verziehen und brechen, wenn sie plötzlich aufhören zu drehen.
Die Ergebnisse des Teams um Prof. Anders la Cour-Harbo sollen dazu beitragen, Drohnen-Propeller zu entwickeln, die einerseits noch ausreichenden Hub haben, und anderseits beim Aufprall leicht auseinanderbrechen, um schwerere Verletzungen oder Beschädigungen zu vermeiden.
Vorneweg: Bis auch in Deutschland ein entsprechender Prüfstand errichtet wird, dauert bis Mitte 2019, als das Fraunhofer-Institut für Kurzzeitdynamik, Ernst-Mach-Institut (EMI) an standardisierten Prüfverfahren für die Sicherheit bei Zusammenstößen mit Drohnen arbeitet. Um entsprechende Grundlagen zu schaffen, ist nun die Errichtung eines Teststands geplant, auf dem Kollisionsszenarien mit kompletten Drohnen bis zu einem Gewicht von 3 kg und Geschwindigkeiten von bis zu 150 m/s nachgestellt werden können.
Ebenfalls im April 2016 ist zu erfahren,
daß Prof. David
Lentink an
der Stanford University einen neuen Windkanal benutzt,
um die Geheimnisse des Vogelfluges zu ergründen und die gewonnenen Erkenntnisse
zum Bau von besseren Luftrobotern anzuwenden. Der Windkanal ist so gebaut,
daß Vögel darin fliegen können, um sie in einer kontrollierten Umgebung
studiert und mit einer Hochgeschwindigkeitskamera gefilmt werden können.
An sich ist dies keine neue Idee, und Vögel sind schon häufiger in Windkanälen geflogen und gefilmt worden. Was den neuen Kanal in Stanford so einzigartig macht, ist, daß er ein System besitzt, das eine präzise kontrollierte Turbulenz ermöglicht, was den Vögeln die Möglichkeit gibt, zu zeigen, zu was sie wirklich fähig sind, wenn sie in der Wildnis fliegen.
Durch das Studium, wie Vögel mit Turbulenzen und wechselnden Windverhältnissen umgehen, hoffen die Forscher, Ideen zur Verbesserung der Techniken zu gewinnen, wie Drohnen und andere autonome Flugzeuge damit umgehen können, anstatt sofort die Kontrolle zu verlieren und aus dem Himmel zu fallen. Dies wäre z.B. für Flüge in urbanen Gebieten mit regelrechten Wind-Canyons zwischen den Gebäuden sinnvoll.
Als die stärkste professionelle Drohne, die es jemals
produziert wurde, wird im April 2016 die neue Matrice
600 von DJI bezeichnet, die eine maximale Nutzlast
von knapp über 6 kg tragen kann
und als Filmkamera sowie zur industriellen Inspektion genutzt werden
soll.
Der 4.600 $ teure Hexakopter besitzt aktiv gekühlte Motoren sowie sechs separate Akkupacks, die unabhängig voneinander umgeschaltet werden können, falls eines ausfällt. Der ebenfalls neue A3 Flight Controller sorgt dafür, daß die Drohne sicher fliegt und kann zudem die Flugparameter, basierend auf verschiedenen Nutzlasten, automatisch anpassen.

Fast zeitgleich präsentiert die Ende 2015 gegründete
Firma DroneRafts LLC aus Greenwood, Indiana, mit ihrem WaterStrider ein
ganz spezielles Anbauteil für die beliebte Phantom-Serie
von DJI, welches es den Quadrokoptern ermöglicht, sicher auf dem Wasser
zu landen.
Benannt nach dem Wasserläufer, einem Insekt, das über die Oberfläche des Wassers laufen kann, verfügt das weniger als 300 g schwere WaterStrider-System über vier runde Schwimmer. Diese sitzen an einzelnen Karbonfaser-Beinen, die seitlich ausgestreckt für eine breite Standfläche sorgen und ein Umkippen weniger wahrscheinlich machen. Um die Kamera der Drohne nicht zu behindern, sind die beiden vorderen Schwimmer weiter voneinander entfernt als die hinteren.
Das Anbauteil läßt sich mit Riemen in weniger als einer Minute am Fahrgestell der Drone befestigen. Neben seiner Verwendung auf dem Wasser erlaubt der WaterStrider auch Landungen im Gelände mit hohem Gras, auf Schnee oder losem Sand.
Nun startet DroneRafts eine Kickstarter-Kampagne, bei der das WaterStrider-Kit für 139 $ angeboten wird. Der später geplante Verkaufspreis beträgt 239 $. Die Idee ist für 159 Unterstützer so interessant, daß die mit insgesamt 24.229 $ dazu beigetragen, das Projekt zu verwirklichen (dessen Finanzierungsziel übrigens 22.500 $ betragen hat). Die Auslieferung soll nun bereits im Juni erfolgen.
Dem Stand von Anfang 2017 zufolge bietet die Firma zwei Modelle des Kits an, einer davon mit zwei roten Schwimmern zur besseren Sichtbarkeit, die 139 $ bzw. 159 $ kosten.
von Alta Devices
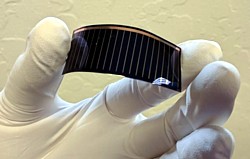
Ebenfalls im April bestätigt das National Renewable Energy Laboratory
(NREL) der Firma Alta Devices einen Rekord-Wirkungsgrad
von 31,6 % bei den Dual-Junction-Solarzellen des Unternehmens.
In Bezug auf das vorliegende Kapitel ist aber noch wichtiger, daß die
neuen Zellen ein verbessertes Leistung/Gewicht-Verhältnis haben, was
sie ideal für Luftfahrtanwendungen macht, einschließlich Drohnen. Im
Vergleich zu dem bisherigen Dünnschicht-Solarmaterial würde das neue
nur ein Viertel so viel wiegen.
Mit den ultra-dünnen Gallium-Arsenid-Solarzellen von Alta Devices wurde schon 2013 eine Puma AE Drohne der Firma AeroVironment bestückt (s.d.). Die neue Dual-Junction-Technologie implementiert auf der Basiszelle eine zweite Schicht aus Indium-Gallium-Phosphide (InGaP) als Absorber, die hochenergetische Photonen besonders effizient nutzt.
Im Mai 2018 wird von der Alta Devices die Einführung von GaAs-Solarzellen der vierten Generation (Gen4) ankündigt, die noch dünner sind und 40 % weniger wiegen als die der vorherigen Generation (Gen3). Damit können sie zur Erzeugung erheblicher Leistung auf kleinen Flächen eingesetzt und damit entscheidend für unbemannte Flugzeuge, Solarautos und andere Elektrofahrzeuge von morgen werden.

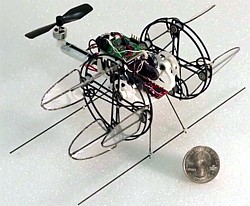
Im Mai stellen die Forscher Weixuan Zhang, Mark
W. Müller und Raffaello D’Andrea aus der schon
mehrfach erwähnten Flying Machine Arena der ETH Zürich eine
Fluggeräte-Studie namens Monospinner vor, die als die
mechanisch am einfachsten zu steuernde Flugmaschine der Welt bezeichnet
wird.
Das experimentelles Objekt verfügt nur über ein einziges bewegliches Teil, einen von einem Motor betriebenen Rotor, während der Rest der Konstruktion in Gegenrichtung rotiert. Dieser normalerweise instabile Zustand wird dabei per Software so austariert, daß ein Gleichgewicht entsteht und das Gerät steuerbar fliegt. Im Flugzustand kreiseln die beiden Ausleger mit der Batterie und der Elektronik mit rund vier Umdrehungen pro Sekunde. Ruhig in der Luft stehen wie ein Quadrokopter kann die asymmetrische Drohne allerdings nicht.
Kontrollierte Flugbewegungen wie steigen, geradeaus oder in Kurven fliegen sind Folge wohldosierter Abweichungen vom Gleichgewichtszustand. Allzu rasant zu manövrieren geht bislang aber nicht, denn ein zu starkes Ungleichgewicht bringt den Monospinner zum Absturz.
Besonders schwierig ist der Start, denn einfach zu starten führt zuverlässig zum Kopfstand, wie das Video der Forscher aus Zürich zeigt. Damit der Monospinner die richtige Drehzahl für die Eigenrotation bekommt, wird ein eigens gebauter Startmast genutzt, auf dem der Kopter frei drehbar befestigt ist und in dessen Lager er durch das Drehmoment seines Rotors in Ruhe auf die gewünschten Touren kommen kann. Alternativ ist es auch möglich, das Gerät per Hand zu starten, indem es wie ein Frisbee in die Luft geworfen wird.

Auf der IEEE International Conference on Robotics and Automation (ICRA)
in Stockholm, ebenfalls im Mai 2016, stellen Wissenschaftler
der University
of Minnesota in Minneapolis eine Drohne vor, die wie ein Hubschrauber
startet und dann wie ein Flugzeug in den Geradeausflug übergeht, wenn
die Flügel ausgeklappt sind. Ihre Spannweite liegt bei etwa 2,1 m, das
Gewicht bei rund 4 kg.
Wir haben schon eine ganze Reihe derartiger Fluggeräte gesehen, doch das Solar Unmanned Air Vehicle: Quad unterscheidet sich von jenen – wie der Namen schon impliziert –, daß die ausklappbaren Flügel der Drohne mit Solarzellen bestückt sind. Diese gewinnen Energie, damit eine längere Flugzeit möglich wird.
Ein angedachter Einsatzbereich ist die lang andauernde Beobachtung von Feldern mit einer multispektralen Kamera, um zu erkennen, an welcher Stelle beispielsweise Bewässerungen oder ein Düngemitteleinsatz erforderlich sind. Mehr zu diesem Thema findet sich weiter oben unter Industrie und Landwirtschaft (s.d.).
(Grafik)
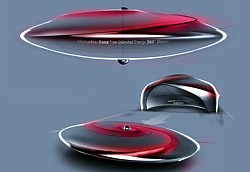
Viel mehr technische Details wünscht man sich bei einem Design namens Free
Unlimited Energy, das Enis Kara von der Hochschule
für Bildende Künste Braunschweig (HBK) in Kooperation mit Mercedes-Benz
Exterior Design Sindelfingen als Bachelor-Abschlußarbeit des Wintersemesters 2015/2016 gestaltet,
die sich im Netz aufrufen läßt.
Dabei basiert das als Speedform Vision bezeichnete und von der Spirale inspirierte Auto auf dem Patent ‚Methode zur Nutzung von Strahlungsenergie‘ von Nikola Tesla aus dem Jahr 1901 (‚Method of Utilizing Radiant Energy‘). Ein unter dem Fahrzeug angebrachter Diffusor läßt sich als Drohne verwenden, die mit zwei Objektiven ausgestattet ihre Bilder direkt in den runden Innenraum das Fahrzeugs sendet.
Und auch diese Drohne soll mit der u.a. Raumenergie, Nullpunktenergie oder Vakuumenergie genannten Kraft betrieben werden, wie Kara schreibt. Demnach fliegen im Schuhmann-Feld zwischen der Ionosphäre und der Erdoberfläche sogenannte Tachyonen, kleinste Teilchen ohne Masse, mit Überlichtgeschwindigkeit umher. Ihre Energieladung wächst, wenn sich ihre Geschwindigkeit verringert und sie erzeugen ein Energiefeld von hoher Dichte, wenn sie abgebremst werden.
Diese unbegrenzte und frei verfügbare Energie wird gleichzeitig empfangen und genutzt, eine Speicherung ist nicht erforderlich. Die vollständige Unabhängigkeit von Energielieferanten erlaubt die Überbrückung großer Entfernungen. Das eigentlich Überraschende ist, daß Kara trotz dieser mutigen Behauptungen den Lucky Strike Junior Designer Award 2017 für sein Konzept erhält.
An der Universität Lund in Schweden werden Fledermäuse studiert,
um u.a. herauszufinden, wie sie trotz ihrer großen Ohren so gut fliegen
können. In dem ebenfalls im Mai erscheinenden Bericht eines Teams um Christoffer
Johansson wird beschrieben, wie drei wild gefangene Fledermäuse
(Plecotus auritus) in einen Windkanal gesteckt wurden,
an dessen anderer Seite man Nahrung plaziert hatte.
Als die Tiere auf den Köder zuflogen, wurden sie mit einem Laser angestrahlt, um herauszufinden, wie sich Luft hinter ihnen bewegt. Solche Messungen werden als zeitaufgelöste Stereo-Partikelbild-Velocimetrie bezeichnet (Particle Image Velocimetry, PIV). Daraus extrapolieren die Wissenschaftler, wie die Flügel und Ohren und der Körper der Fledermaus beim Fliegen aufgerichtet bleiben.
Es stellt sich heraus, daß die Luft hinter dem Körper einer langohrigen Fledermaus nach unten beschleunigt, was bedeutet, daß Körper und Ohren Auftrieb liefern. Das unterscheidet die langohrigen Fledermäuse von anderen Arten, die studiert wurden, und zeigt, daß die großen Ohren nicht nur einen Widerstand erzeugen, sondern dem Tier auch helfen, sich in der Luft zu halten.
Die Ohren zeigen nach vorn und etwas seitlich, was darauf hindeutet, daß die Aerodynamik jener von vorwärts gekehrten Flügeln oder umgekehrten Deltaflügeln ähnelt. Das einzigartige ,Design’ könnte eine gute Vorlage dafür sein, Drohnen bei langsamen Manövern zu unterstützen. In einem nächsten Schritt will Johansson die Schwanzmembran der nächtlichen Flieger untersuchen, die möglicherweise weitere Geheimnisse über die Manövrierfähigkeiten der Tiere enthält.
Im Oktober folgt eine Meldung aus der Schweiz, wo Wissenschaftler am
Labor für intelligente Systeme (LIS) der Eidgenössischen Technischen
Hochschule (École Polytechnique Fédérale de Lausanne, EPFL)
in Lausanne m Rahmen des Nationalen Zentrums für Kompetenz in der Forschung
(NCCR) Robotik Vorbildern der Natur folgen, um fortgeschrittene Robotiksysteme
zu bauen.

mit Käfer-Flügeln
Bisherige Arbeiten des LIS waren die DALER Drohne von Mitte 2013 (s.d.), die sich am Boden krabbelnd voranbewegt, sowie ein Heuschrecken-Roboter, der 27 mal so hoch wie seine Körpergröße springen kann.
Die nun auf der International Conference on Intelligent Robots and Systems in Korea vorgestellte kompakte Drohne des Teams um Prof. Dario Floreano benutzt Käfer-inspirierte Flügel, um sich in den Himmel zu schwingen. Zusammengeklappt hat die Drohne dagegen nur 43 % der Spannweite und 26 % der Oberfläche, die sie im Betriebsmodus hat. Statt 200 x 500 x 16 mm betragen die Maße der zusammengefalteten Drohne nur noch 115 x 215 x 40 mm. Die Flügel, die mit einer einzigen Bewegung entfaltet werden können, wiegen alleine nur 26 g.
Eines der Probleme, das bei der Modellierung der künstlichen Käfer-Flügel angegangen werden mußte, war die richtige Materialdicke: dünn genug, damit sich die Flügel leicht falten konnten, aber dick genug, um den Belastungen des Fluges standzuhalten. Das Team löst dies mit einem Muster von Fliesen unterschiedlicher Dicke, bestehend aus mehrschichtigem Material, das an den Falten mit vorgespanntem Latex verbunden ist, welches für eine optimale Haltbarkeit und ein reibungsloses Entfalten sorgt.
In Windkanal-Tests zeigt sich, daß die Käfer-Drohne nur geringfügig mindere Leistung im Vergleich zu einer ähnlichen Drohne mit dauerhaft starren Flügel aufweist.

mit Faltflügeln
In einem Bericht vom Dezember 2016 beschreiben die Forscher um Floreano, wie sie eine Drohne mit Federn ausstatten, um die Präzision während des Fluges zu erhöhen. Das Bio-inspirierte Gerät kann seine Flügel beim Fliegen verbreiten oder schließen, so daß es leichter zu manövrieren und auch bei hohen Winden widerstandsfähiger ist.
Wenn sie die Richtung ändern, ihre Geschwindigkeit erhöhen sie oder Gegenwind haben, verändern Vögel die Konfiguration ihrer Flügel. Um beispielsweise zu steuern, verbreiten sie den einen Flügel und ziehen den anderen leicht zurück. Durch diese Anpassung ihrer Flügelspannweite schaffen sie ein berechnetes Ungleichgewicht, das ihre Drehung verursacht. Bisher konnten nur Vögel das so effektiv machen.
Floreanos Team entwickelt daraufhin eine energieeffiziente Drohne, die verschiedene aerodynamische Anforderungen erfüllen kann und fähig ist, zwischen Hindernissen zu fliegen, scharfe Wendungen zu machen und starke Winde zu bewältigen. Der künstliche Vogel kann alle diese Kriterien durch die Veränderung der Flügelgeometrie mitten während des Fluges zu erfüllen.
Eine der vielen Herausforderungen bei der Entwicklung bestand darin, den komplexen bewegliche Morphing-Mechanismus zu entwerfen und zu bauen, der sich an den äußeren Flügelenden befindet, und dabei die richtige Balance zwischen der aerodynamischen Effizienz und dem Gewicht des Gerätes zu finden. Der Flügel besteht daher hauptsächlich aus Verbundwerkstoffen, um die Festigkeit zu maximieren und gleichzeitig das Gesamtgewicht zu reduzieren.
Eine wichtige Erkenntnis des vielversprechenden Projekts, das vom National Centre of Competence in Research (NCCR) Robotics finanziert wird: Bei einem Einsatz faltbarer Flügel entfällt der Bedarf nach einem Querruder.

Der möglicherweise wichtigste Bereich technologischer Entwicklungen betrifft
die Energieversorgung von Drohnen. Im Jahr 2016 gibt
es mehrere diesbezügliche Veröffentlichungen, beginnend mir einer Meldung
im Mai über das von den drei MIT-Absolventen Adam Mohamed, Damon
Henry und Brent McLaughlin im August 2015 gegründete
US-Start-Up Asylon aus Philadelphia, das auf der Drohnenmesse
Xponential in New Orleans eine automatische Akkutauschstation für
Flugdrohnen vorstellt.
Die Station namens DroneHome hält ein Dutzend Akkus bereit und kann diese auch wieder laden, was ein Generator übernimmt, falls es vor Ort keinen Stromanschluß gibt. An der Drohne selbst muß die Akkuhalterung adaptiert werden, um den automatischen Wechsel zu ermöglichen, nach dem die Drohne flugs wieder abheben kann. Das Gerät funktioniert derzeit zwar mit dem Quadkopter S1000 von DJI, Asylon will jedoch auch bald eine Station auf den Markt bringen, die mit vielen Modellen unterschiedlicher Hersteller kompatibel ist.
Zusätzlich zum Akkutausch fungiert DroneHome auch als Funkstation. Es kann von Drohnen größere Datenmengen übernehmen und auf Server hochladen. Außerdem können mehrere DroneHome-Stationen zu einem Meshnetz verbunden werden, in welchem Daten zwischen den Stationen ausgetauscht werden können. Damit hätten die Drohnen mehrere Anlaufstationen für ihren Akkutausch, wodurch sich neben der Betriebsdauer auch das Betriebsgebiet deutlich ausdehnen ließe.

Interessanterweise folgt schon im Juni ein Bericht über einen fast identischen
Ansatz, der diesmal auf das im Juli 2014 von Ran
Krauss und Meir Kliner gegründete und in
Petah Tikva angesiedelte israelische Start-Up Airobotics zurückgeht,
das auch eine Außenstelle im australischen Perth besitzt. In seinem
früheren Leben hatte das Unternehmen ab 2012 unter
dem Namen Bladeworks als Dienstleister Kinematographie-Projekte
für Kunden durchgeführt.
Die aktuellen Meldungen über Airobotics – nach fast zwei Jahren im ,Stealth-Modus’ – hängen damit zusammen, daß es der Firma in einer kombinierten Finanzierungsrunde A und B gelingt, 28,5 Mio. $ von BlueRun Ventures, CRV u.a. Investoren einzunehmen. Zudem erhält das Unternehmen Finanzierungen vom Office of the Chief Scientist (OCS) und den UpWest Labs.
Das den Abbildungen zufolge gut designte Airbase System, das äußerlich nur ein Container ist, erinnert vom Aufbau her an die im vergangenen Jahr präsentierte DRONEBOX. Auch hier gelangt die Drohne über ein sich automatisch öffnendes Dach ins Innere, wo ein Roboterarm den Akku des Luftfahrzeugs austauscht, um die Drohnen wieder in die Luft zu bringen. Der Roboterarm kann aber auch einsatzspezifisch erforderliche Geräte einbauen, wie z.B. eine Nachtsichtkamera.
Zum Einsatz kommt der firmeneigene Optimus Quadrokopter, der zu 30-minütigen Flügen fähig ist, 1 kg Nutzlast tragen und so programmiert werden kann, daß er selbständig starten, Erkundungsflüge durchführen und eine vorher definierte Region abfliegen und observieren kann. Ein Fallschirm der 2012 gegründeten Schwesterfirma ParaZero in Be’er Sheva hilft, die Drohne auch bei Ausfällen sicher auf die Erde zu bringen. Diese Unternehmen bietet u.a. PZ SafeAir Fallschirm-Systeme für Drohnen zwischen 2 kg und 25 kg an.
Bis Ende des Jahres will Airobotics bereits 25 Drohnen an gewerbliche Kunden in der ganzen Welt liefern – ob alleine oder als Airbase-System, wird nicht gesagt.

Eine andere interessante Methode, die aber auch schon mehrfach umgesetzt
worden ist, sind mit dem Boden verbundene Drohnen (tethered
drones).
Im Juli 2015 wird die erste entsprechende Station der im Vorjahr gegründeten französischen Technologiefirma Elistair aus Lyon (später: Champagne-Au-Mont-D’or) vorgestellt, die den Namen Safe-T trägt und mit einer Reihe der marktgängigen Koptern betrieben werden kann. Im Mai 2016 folgt das Modell Light-T, ein kleineres, kompakteres Haltesystem, das so konzipiert ist, daß es leicht transportierbar und schnell auf jedem Gelände einzusetzen ist.
Das Light-T ist mit bis zu 20 Drohnenmodellen kompatibel, einschließlich der Modelle von DJI, und bietet eine schnelle Bereitstellung in einer Höhe von bis zu 50 m über dem Boden. Während das Safe-T über eine motorisierte Seilwinde verfügt, besitzt das Light-T eine einfach zu bedienende manuelle Winde mit einem verstaubaren Griff.

Ebenfalls im Mai beteiligt sich Elistair bei den 2. Journées Techniques ‚Interventions d’urgence sur véhicules‘ n Poitiers, bei denen europäische Feuerwehrdelegationen aus 15 Ländern mitmachen, an Live-Experimenten zur Brandbekämpfung. Dabei liefert das Fesseldrohnensystem mehr als 4 Stunden lang einen kontinuierlichen Live-Luftvideostream aus einer Höhe von ungefähr 60 m für ein besseres Krisenmanagement.
Die Multikopter haben durch ihre Kabelverbindung die Fähigkeit zur konstanten Datenübertragung und werden mit einer Dauerleistung versorgt, was eine unbegrenzte Flugzeit und eine laufende Überwachung bis zu einer Höhe von 50 – 100 m ermöglicht. Das bis zu 100 m lange Kevlarkabel als Strom- und Datenleitung besitzt eine automatische Kabelaufrollung. Die Technik verringert die Chance, daß die Batterie ausfällt und die Drohne abstürzt, und hält sie natürlich auch davon ab, Amok zu fliegen und den Flugverkehr zu stören.
Dies ist besonders wichtig, da die angebundenen Drohnen ab dem August 2016 verwendet werden, um die hohen, ausfahrbaren Gangways am Flughafen Paris-Charles de Gaulle zu untersuchen, ebenso wie bei der Kalibrierung von Flugsicherungsinstrumenten des Flughafens Paris-Le Bourget. Weitere Einsatzgebiete sind in diesem Jahr u.a. die automatische Verkehrsüberwachung sowie eine ebenfalls automatisierte Inventarisierungslösung für Lagerhäuser.

Im Mai 2017 wird das Modell Ligh-T 2 (mit veränderter Schreibweise) angekündigt, eine spezielle Tethering-Station für die DJI Inspire 1 Kamera-Drohne.
Zusätzlich zu den beiden Tether-Systemen bietet Elistair die Orion-Drohne an: eine automatisierte, leistungsstarke und trotzdem tragbare Fesseldrohne, die für die kontinuierliche Luftüberwachung bei Tag und Nacht über längere Zeiträume in großen Gebieten ausgelegt ist. Sie ist perfekt geeignet für die Strafverfolgung, für die private und öffentliche Sicherheit sowie für militärische Zwecke.
Im April 2019 stellt das mehrfach ausgezeichnete Unternehmen auf der XPONENTIAL 2019 in Chicago, Illinois, die Ligh-T V4 mit 70 m langer Mikro-Leine vor, als neueste Generation robuster und kompakter Fesseldrohnensysteme. Im Juli folgt ein besonders interessanter Einsatz, als zwei Fesseldrohnen 84 Flugstunden lang die Sicherheit des viertägigen Grand Prix unterstützen.
In Deutschland bietet die 2014 gegründete Firma Copting GmbH in Braunschweig Dienstleistungen mit diesem System unter dem Namen T-UAV (tethered drone) an, in Hong Kong und Macau ist es die Firma Dronesurvey Asia.

Ebenso wichtig könnte sich die drahtlose Energieversorgung von
Drohnen erweisen. Nikola Tesla soll schon 1926 gesagt
haben: „Die vielleicht wertvollste Anwendung der drahtlosen Energie
wird der Antrieb von Flugmaschinen sein, die keinen Treibstoff mitführen
und frei von allen Beschränkungen der heutigen Flugzeuge und Luftschiffe
sein werden.“
Im Oktober 2016 berichten die Fachblogs über Forscher des Imperial College London um Prof. Paul Mitcheson und Sam Aldhaher, die eine Drohne über einer Stromquelle schweben lassen und sie durch die Luft induktiv aufladen.
Die Wissenschaftler meinen, daß es mit ihrer Wireless Power Transfer (WPT) Technologie zum ersten mal gelungen sei, ein fliegendes Objekt kabellos mit Energie zu versorgen – was natürlich nicht ganz stimmt, wie z.B. die Versuche der Firma LaserMotive ab dem Jahr 2010 belegen, als ein Quadrokopter den Strom für seinen Motor per Laserstrahl bekommt, nachdem schon im Jahr davor das Modell eines Orbital-Fahrstuhls mittels energieeffizienter Diodenlaser auf eine Höhe von 900 m angehoben werden konnte – oder die Arbeiten am NIMBUS lab der University of Nebraska-Lincoln im Jahr 2012, wo ein Quadrokopter ebenfalls mit einem Induktionssystem ausgestattet wurde (s.d.).
Die neue Technologie arbeitet mit dem Konzept der induktiven Kopplung, das schon vor rund hundert Jahren von Nikola Tesla entwickelt wurde. Dabei werden zwei Kupferspulen so eingestellt, daß sie auf der gleichen Frequenz schwingen und damit den drahtlosen Austausch von elektrischer Energie ermöglichen.
Die Forscher in London nutzen für ihre Experimente eine handelsübliche Quadkopter-Minidrohne mit einem Durchmesser von rund 12 cm, deren Elektronik verändert und deren Batterie entfernt wird. Als Empfangsantenne stellen sie einen Kupferfolienring her, die das Drohnengehäuse umschließt. Das elektromagnetische Feld am Boden entsteht, indem ein Sender mit der Elektronik und einer Energiequelle verbunden wird.
Sobald die Drohne in das Magnetfeld fliegt, wird eine Wechselspannung in der Antenne induziert, welche von der Elektronik der Drohne in Gleichstrom umgewandelt wird. Noch befindet sich die Technologie in einer Experimentierphase und die Drohne kann nur 10 cm über dem elektromagnetischen Feld als Energiequelle fliegen. Für ein Aufladen über größere Distanzen muß eine Steigerungen der Frequenzen um den Faktor 10 bis 100 erreicht werden, was eine große Herausforderung bedeutet. Trotzdem wollen die Forscher ein marktfähiges Produkt binnen eines Jahres parat haben.

(1. Prototyp)
Bei einer Recherche stellt sich heraus, daß die im Vorjahr gegründete
Firma Global Energy Transmission Corp. (GET) bereits im Juni 2016 auf
dem Technologiegipfel im Napa Valley ein drahtloses Stromversorgungssystem
für Drohnen präsentiert hat. Das Unternehmen mit Sitzen in Moskau und
in Portland, Oregon, stellt seine neue Distant Wireless Power
Technology vor, die industrielle Drohnen über eine Reichweite
von vielen Metern von einem sicheren, einfach zu installierenden drahtlosen
Leistungssender aus versorgen kann.
Nachdem Mitte 2015 der erste Labor-Prototyp mit einer Masthöhe von 12 m aufgerichtet wurde, hat die GET Anfang 2016 die weltweit erste Prototyp-Hardware gebaut und erfolgreich getestet, die mobile Geräte drahtlos auflädt und LED-Glühbirnen über große Entfernungen in Gebäuden zum Leuchten bringt. Bald darauf wird auch das erste System getestet, das große und schwere Drohnen drahtlos mit Energie versorgen kann.

der GET
So wird ein per Video dokumentierter einstündiger Testflug durchgeführt, bei dem eine aus Sicherheitsgründen angebundene Drohne mit einem durchschnittlichen Stromverbrauch von 200 – 300 W (Standardmodell DJI F550) und einem Spitzenverbrauch von bis zu 450 W komplett kabellos angetrieben wird. Mit der neuen Lösung können Drohnen so lange im Flugmodus bleiben, wie nötig, und es ist nicht mehr erforderlich, sie zu landen, um sie aufzuladen. Auf dem o.e. Technologiegipfel wird ein drei Stunden langer, ununterbrochener Flug demonstriert.
Obwohl es sich bei dem induktiven Aufladesystem in der Luft noch immer um einen Prototyp handelt, plant die GET, schon 2017 mit der kommerziellen Auslieferung der drahtlosen Hochleistungsladegeräte für Drohnen zu beginnen. Natürlich ist das viel zu kurz gegriffen – doch immerhin gelingt es der GET im Mai 2017 in einer Seed-Runde Investitionsmittel in Höhe von 2,5 Mio. $ einzuwerben. Die Investitionsrunde ist eine bahnbrechende grenzüberschreitende russisch-amerikanische Joint-Venture-Investition, die vom IP Fund (Russland) und Draper Associates (USA) geleitet wird.

im Test
Im November wird die nächste Generation des drahtlosen Energieübertragungssystems vorgestellt, die mehreren Drohnen gleichzeitig eine effiziente, sichere und schnelle Hochleistungsaufladung während des Fluges an einem GET-Power-Hotspot erlaubt. Gibt es genug von diesen Ladeschleifen, die mehrere Kilometer voneinander aufgestellt sind, kann eine ganze Armee von Drohnen in der Luft schweben, die nie landen müssen.
Das aktuelle GET-System scheint einfach genug: ein sechseckiger Rahmen von etwa 10 m Durchmesser, der wie ein teilweise konstruierter Pavillonrahmen aussieht und aus Drähten auf Stangen besteht. Wenn jedoch eine entsprechend aufgebaute Drohne hineinfliegt, kann dieser Rahmen bis zu 12 kW Leistung mit einer Effizienz von etwa 80 % übertragen – genug, um durch einen sechsminütigen Stopp Energie für eine Flugzeit von etwa 25 Minuten aufzunehmen.

Die Firma stellt ihre Technologie im September 2018 auf der Internationalen Drohnen Messe in Berlin vor und gibt den Beginn der Vorbestellungen für das schlüsselfertige GET Air System bekannt – gefolgt von der dritten Generation der autonomen drahtlosen Aufladungslösung, die im Oktober im Rahmen einer strategischen Partnerschaft mit der Hitachi High-Technologies Corp. präsentiert wird. Man darf also auf weitere Neuigkeiten gespannt bleiben.
Im November informiert die GET über den aktuellen technischen Stand ihrer drahtlosen Fernladetechnologie, die demnach bis zu 12 kW in einer Entfernung von 8 m übertragen kann. Das System verwendet eine dreiphasige 15 kW Energiequelle und kann je nach Konfiguration bis zu drei Antriebe gleichzeitig laden.
Dem Stand von Anfang 2019 zufolge kosten die Ladestation und zwei Spezialdrohnen, die jeweils 7 kg Nutzlast tragen können, etwa 120.000 $. Im Oktober wird ein Video veröffentlicht, in dem die Firma die nächste Generation ihrer drahtlosen Aufladungslösung zeigt.
Auch im Bereich der Steuerung von Drohnen gibt es erwähnenswerte
Entwicklungen. So wird auf der Maker Fair Ende Mai 2016 beispielsweise
gezeigt, wie sich der Power Glove von Nintendo verwenden
läßt, um einen Quadrokopter mit lässigen Handbewegungen in der Luft herumtanzen
zu lassen. Der seit Jahrzehnten genutzte Handschuh ist sowieso ein Liebling
unter Hackern, die auf der Suche nach neuen Anwendungen für Peripheriegeräte
sind.
Für die Umsetzung hatte Nolan Moore den Handschuh komplett ausgenommen und mit modernen Komponenten gefüllt, darunter auch Flex-Sensoren an jedem Finger. Damit lassen sich einfache Handgesten, wie nach oben/unten oder das Drehen des Handgelenks in direktionale Befehle an die genutzte AR Drone 2.0 umwandeln.

Noch interessanter ist das Konzept Shift einer Firma
mit dem seltsamen Namen this is engineering Inc. (t
i_e;) und Sitz in Seoul, Korea, sowie Wilmington, Delaware, das im Oktober
in den Blogs erscheint, als eine Kickstarter-Kampagne anläuft, um die
zur Verwirklichen benötigten 50.000 $ zu beschaffen.
Bei Shift handelt es sich um eine futuristisch aussehende, 1.200 g schwere Drohne mit den Maßen 32 x 32 cm samt einer innovativen Fernbedienung, die es in zwei Versionen gibt und die dem Piloten das Steuern der Drohne mit nur einer Hand ermöglicht – was bislang als Alleinstellungsmerkmal gilt. Das Steuern geschieht mit einem Stick und einem Daumenring.
Die Drohne besitzt eine fest verbaute HD-Kamera, welche durch eine runde Plastikkugel geschützt wird. Die Live-Bilder der Kamera können in Echtzeit auf dem Smartphone empfangen werden, so daß man die Drohne auch in der Cockpitperspektive fliegen kann. Die Aufnahmen werden auf elektronischem Wege stabilisiert. Mit einem 5.000 mAh starken Akkus soll sie maximal 30 Minuten lang fliegen, die maximale Geschwindigkeit beträgt 80 km/h.

Das einzigartige ist aber die sehr intuitive Fernbedienung, bei deren 1. Version ein Ring fest mit dem Controller verbunden ist, während man bei der 2. Version den Ring auf den Daumen zieht, ohne daß er eine Verbindung mit dem Controller hat. Dafür erkennt ein integrierter Sensor, in welche Richtung sich der Ring am Daumen bewegt, so daß die Drohne entsprechend reagiert.
Tatsächlich gelingt es im Zuge der Kickstarter-Kampagne, bei der verschiedene Pakete zwischen 89 $ und 790 $ angeboten werden, von 272 Unterstützern einen Gesamtbetrag von 103.831 $ einzunehmen, so daß einer Umsetzung und Auslieferung im kommenden Mai nichts mehr im Wege zu stehen scheint. Dennoch wird das Finanzierungsprojekt von den Initiatoren ohne Angabe genauerer Gründe im November 2016 abgebrochen.
Im November 2019 wird dann der Nachfolger Shift Red präsentiert, der eine Reihe von neuen Funktionen aufweist und inklusive Batterie nur 93 g wiegt, was bedeutet, daß er bei der FAA nicht registriert werden muß. Ein 3D-Sensorsystem läßt das Fluggerät genau wissen, wo es sich befindet, und ein autonomer Pilotmodus namens Lezero kann eine Vielzahl von Kamerabewegungen durchführen um das Zielobjekt zu verfolgen und zu erfassen. Zudem verwendet die Kamera der Drohne einen innovativen virtuellen Gimbal, um die Videos digital so zu stabilisieren, daß sie sehr scharf aussehen.
Das eigentlich Wesentliche, der Einhand-Controller mit dem zum Patent angemeldeten Daumenring, bleibt hingegen unverändert. Die mit einem 1100 mAh Akku ausgestattete Shift Red erreicht eine Flugzeit von bis zu 17 Minuten und wird ab sofort für 299 $ angeboten. Ein Jahr später kostet er nur noch 200 $ und im Jahr 2021 ist er bereits ab gut 100 € zu haben.

(Grafik)
Im Fortlauf der Chronologie ist auch die im Juli 2016 kursierende
Meldung von Interesse, der zufolge das britische Rüstungsunternehmen BAE
Systems, das uns schon mehrfach begegnet ist, futuristische
Pläne zur Konstruktion von Drohnen vorgestellt hat, die auf einem Chemputer genannten
Gerät basieren.
Im Grunde geht es dabei darum, Luftfahrzeuge durch chemische Prozesse zu ,züchten’, wobei die Drohnen und einige ihrer komplexen elektronischen Systeme in einer schleimartigen Flüssigkeit mit Hilfe verschiedener Chemikalien von einem molekularen Level aufwärts wachsen würden. Laut dem Unternehmen wäre es so möglich, die Bauzeit großer Drohnen von etwa 3 Jahren auf wenige Wochen zu reduzieren.
Weitere Details über den als radikal neue Maschine bezeichneten Chemputer, der von einem Team um Prof. Nick Colosimo entwickelt wird, sind bislang nicht bekannt, ebenso wie es noch keine weiteren Informationen über die Pläne von BAE Systems gibt, deren bisherige Referenzen aber Wahrscheinlich machen, daß es sich um ein tatsächlich umsetzbares Konzept handelt.

Anfang August 2016 startet eine Drohne mit vier Propellern
in den Himmel – um erst nach genau 22 Stunden, 29 Minuten und 38 Sekunden
wieder zu landen und dadurch einen neuen Rekord für den längsten Flug
durch ein vertikal starten und landendes Flugzeug aufzustellen.
Der Hybrid-Quadrokopter HQ-60 der Firma Latitude Engineering LLC aus Tucson, Arizona, übertrifft damit den bisherigen Rekord eines A160 Hummingbird Hubschraubers von Boeing aus dem Jahr 2008 (18 Stunden und 45 Minuten). Über eine frühe Latitude-Version unter dem Namen Hybrid Quadrotor UAV hatte ich bereits in der Übersicht 2013 berichtet, ebenso wie über die autonome und antriebslose Wurfsonde NavSonde im Jahr 2015 (s.d.).
Ebenfalls mehr zu den technischen Entwicklungen als zu den Consumer-Drohnen
gehört ein Projekt namens Airblock, das im Oktober 2016 in
den Blogs veröffentlicht wird und eindeutig mehr als nur ein Spielzeug
ist.

Unter dem Motto ,Code to fly’ möchte der Hersteller, die Firma Makeblock Co. Ltd. aus Shenzhen in China (zuvor: Shenzhen Maker Works Technology Co. Ltd.), die auch einen Firmensitz in San Francisco hat, mit ihrem Drohnenbausatz gleichzeitig Wissen über das Programmieren, die Physik und die Technik selbst vermitteln.
Die Airblock-Kits enthalten Styroporkörper und separate Module für Rotoren und den Empfang von Steuerbefehlen. Diese lassen sich durch Magneten in unterschiedlicher Weise aneinander heften, obwohl das Design zwei spezifische Fahrzeugtypen, ein Luftkissenfahrzeug und eine Hexakopter-Drohne, begünstigt. Den Strom liefert ein 700 mAh Akku.
Das Luftkissenfahrzeug kann acht Minuten lang schweben und sogar über Wasser zu fahren bzw. in geringem Abstand darüber fliegen, wobei es eine Höchstgeschwindigkeit von 2,5 m/s erreicht, während die Drohne eine Flugzeit von sechs Minuten hat, bis in eine Höhe von 10 m aufsteigen kann und mit einer Spitzengeschwindigkeit von 1,5 m/s fliegt. Das Styropor macht das Ganze stoßresistent und sicher im Innenbereich. Über die entsprechende App für iOS kann man die Drohne entweder direkt steuern oder vorher programmieren, um sie automatische Manöver fliegen zu lassen.
Als das Airblock-System nun auf Kickstarter für 89 $ angeboten wird, um 100.000 $ einzuwerben, ist die Begeisterung so groß, daß 5.307 Unterstützer beachtliche 829.506 $ zusammenbringen, um das Projekt zu verwirklichen und das versprochene Lieferdatum im Februar 2017 zu halten. Überraschenderweise wird das Projekt dann auf die Plattform Indiegogo verschoben, wo der Betrag bis Mitte Dezember auf 867.846 $ anwächst – obwohl der Kit nun 129 $ kosten und erst im 2. Quartal verfügbar werden soll.

Eine interessante technische Entwicklung bildet auch die Drohne, die
von den Schülern Fabian Albrecht, Felix Haag und Jonas
Gehring aus dem Schülerforschungszentrum SFZ-Südwürttemberg auf
der Erfindermesse iENA im Oktober 2016 in Nürnberg
zeigen.
Davon ausgehend, daß schlechtes Wetter ein massives Problem bei der Rettung und Versorgung von Menschen in Not ist, egal ob im Hochgebirge oder Katastrophengebieten, und sich ebenso negativ auf Drohnen auswirkt, die durch Kälte und Luftfeuchtigkeit normalerweise den Auftrieb verlieren, entwickeln die drei eine Version, die dank eines speziellen Heizmaterials am Rotorblatt bei jedem Wetter fliegt. Was das für ein Material ist, ist noch geheim, da noch ein Patent angemeldet werden soll.
Die massive und große Drohne, die schon beim Wettbewerb Jugend forscht 2015 erfolgreich war, sei der erste allwettertaugliche Multikopter, der dank der weltweit ersten Propellerheizung auch bei Vereisungsbedingungen fliegen kann. Mit einer Wärmebildkamera und einem LED-Spot kann er dann nach verletzten oder vermißten Personen suchen, und zwei aus dem Rumpf ausfahrbare Frachtplattenformen bieten Platz für Module mit zusammen über 30 Litern Stauraum zur Versorgung oder für Erste-Hilfe-Zwecke.
Nachdem ein nicht genanntes Unternehmen die 17- und 18-Jährigen engagiert hat und sie nun sponsert, sollte bald mehr über die interessante Entwicklung zu hören sein.
Als kleinster Cyclocopter, der jemals entwickelt wurde, wird ein Design bezeichnet, das im Dezember in den Blogs kursiert und von Prof. Moble Benedict und die Absolventen Carl Runco und David Coleman vom Advanced Vertical Flight Laboratory der Texas A&M University stammt.
Ein Cyclocopter verwendet Tragflächen, die sich um eine horizontale Achse drehen, um Hub und Schub zu erzeugen. Da sich jede dieser Tragflächen schwenken läßt, kann dieser Schub in jede Richtung senkrecht zum Rotor gerichtet werden. Dadurch kann das Fluggerät z.B. vom stabilen Schweben auf den Hochgeschwindigkeits-Vorwärtsflug übergehen, ohne sich wie ein Hubschrauber oder Multirotor-Flugzeug umdrehen zu müssen. Der kleine Rotor auf der Rückseite des nur 29 g schweren Cyclocopter stabilisiert dessen Neigung.
Mehr über Cyclocopter-Umsetzungen, u.a. auch ein früheres, wesentlich größeres Modell von Benedict, findet sich unter den Antriebs-Varianten der Vertikalachsen-Rotoren im Kapitel Windenergie. Der Entwicklungsstand bei personentragenden Systemen wird in der Jahresübersicht 2020 präsentiert (s.d.).
Weiter mit den Elektro- und Solarfluggeräten...