Buch der Synergie
| Blättern |
 TEIL
C
TEIL
C
Elektro- und Solarschiffe (I) 1838 - 1999
Die lange Geschichte der Elektroboote und -schiffe möchte ich
durch einige besondere Highlights illustrieren:
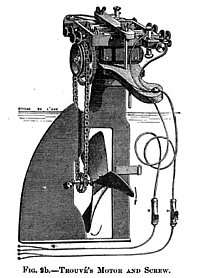
von Trouvé
Bereits 1838 experimentiert Prof. Moritz Hermann Jacobi auf der Neva in Rußland mit einem elektrisch angetrieben Schaufelradboot (die Schiffsschraube war ihm noch nicht bekannt). Sein vier Jahre zuvor bei der St. Petersburger Akademie der Wissenschaften eingereichter Entwurf wird von Zar Nikolaus I. finanziert. Mit 12 – 13 Passagieren an Bord erreicht das Elektroboot eine Fahrtgeschwindigkeit von knapp 5 km/h.
Der weltweit erste elektrische Außenbordmotor wird im Mai 1880 von dem Pariser Gustave Trouvé patentiert (Nr. 136560), der uns schon bei den Elektromobilen begegnet ist und sogar ‚elektrischen Schmuck’ gerstellte. Mit einem Boot namens ‚Le Téléphone’ – eine Hommage an Graham Bell, der fünf Jahre zuvor selbiges erfunden hatte – erreicht Trouvé 1881 eine Geschwindigkeit von 10,8 km/h. Anderen Quellen zufolge soll das frühe Elektroboot den Namen ‚Eureka’ getragen haben. Später wurden etwa 300 dieser Motoren gebaut und hauptsächlich an Freizeit-Schiffen auf der Seine eingesetzt.
Auf der Weltausstellung 1883 in Wien wird ein Elektroschiff für 45 Passagiere vorgestellt.
1888 geht die Viscountess Bury in Dienst, ein 20 m langes E-Boot für 84 Passagiere, das bis 1910 auf der Themse fährt (und dann auf Brennstoffbetrieb umgestellt wird). Ebenfalls 1888 ordert das Chinesische Kaiserreich 15 m lange E-Boote die 18 km/h schnell sind, um mit dieser Überlegenheit den Opiumhändlern das Handwerk zu legen.
Der spanische Ingenieur Isaac Peral entwickelt 1888 ein battriebetriebenes U-Boot, das aber trotz erfolgreicher Tests von der Marine nicht akzeptiert wird.

1892/93 übernehmen 55 Exemplare der 11 m langen E-Boote der Electric Launch Co. (Elco) den Transport von mehr als einer Million Besucher auf der Weltausstellung in Chicago – und legen dabei ohne eine einzige Panne über 200.000 Meilen zurück. Außerdem fahren sie 300.000 $ Gewinn ein.
Ein Schiff mit Oberleitung wird im Jahr 1893 von Frank W. Hawley auf dem Erie-Kanal getestet - so merkwürdig dies auch klingen mag. Abgeleitet vom nur wenige Jahre zuvor erfundenen Trolley-Bus wird das Gefährt Trolleyboat genannt. Über die gespannten Kabel und die Stromabnehmer werden zwei Elektromotoren von jeweils 25 PS versorgt, welche die beiden Schiffschrauben betreiben. Im Gegensatz zu Batterie-Booten bleibt der Laderaum weitgehend frei - und die Reichweite ist theoretisch unbegrenzt. Die Technik wird auch für Schlepper, und hauptsächlich in Kanälen, eingesetzt, ist inzwischen aber völlig in Vergessenheit geraten.

1898 besitzen die Unternehmen Immisch Launch Electric Co. und Thames Valley Start Co. jeweils etwa sechzig elektrische Boote auf der Themse, die sie vermieten. Sie sind zwischen 4,5 m und 14 m lang. Daneben gibt es etwa die gleiche Anzahl Boote in Privatbesitz, und die meisten der großen Bootsbauer haben Erfahrung im Bau von Elektrobooten.
Ebenfalls 1898 baut die Sergeants-Werft auf der Eel Pie Themsen-Insel das 16 m lange Teakholz-Elektroboot Mary Gordon, das bis zu 75 Erwachsene oder 120 Kinder befördern kann.
1903 werden von Elco in New Jersey 250 E-Boote zwischen 5,5 und 12 m Länge ausgeliefert. Kunden sind unter anderem das englische Königshaus, Zar Nikolaus II, Großherzog Alexander von Rußland, Thomas Edison, George Westinghouse, Baron Rothschild und JJ Astor.

Noch heute fahren elektrische Kanus wie die Gena von 1903 auf der Themse – und diese tut es sogar noch immer mit ihrem originalen Elektromotor und dem ursprünglichen Steuersystem von damals!
Am 07.04.1913 (anderen Quellen zufolge bereits im August 1912) läuft das erste elektrisch betriebene Schiff der US-Navy vom Stapel, die USS Jupiter (später umbenannt in USS Langley). Das 19.360 t schwere Schiff ist mit dem Prototyp eines Elektroantriebs ausgestattet, der in den späten 1910er und den 1920er Jahre zunehmend in den Kriegsschiffen der Navy eingesetzt wird. 1918 wird als erstes von drei Schiffen die USS New Mexico (36.000 t) mit Elektromotoren ausgestattet, deren Strom von vier Dampfturbinen erzeugt wird. Die 40.000 PS beschleunigen das Schiff auf 21,5 Knoten.

Während des 2. Weltkriegs hatte die amerikanische Marine Begleitschiffe im Einsatz, die ebenfalls mit Dampfturbinen und elektrischen Antrieben ausgestattet waren.
Doch schon 1920 naht das Ende des Elektroantriebs – mit der Entwicklung leichter und einfach zu betankender Benzinmotoren. Qualm und Rauch kümmern dabei niemanden...
Einzige Ausnahme: Elektrisch betriebene U-Boote, die keine Luft für den Betrieb ihrer Dieselmaschinen benötigen, und daher auch keine verräterische Abgaswolke über der Meeresoberfläche zeigen. Bei ihrer Entwicklung ist Deutschland führend.
Die deutschen U-Boote vom Typ XXI Elektroboot kommen allerdings zu spät, um den 2. Weltkrieg noch entscheidend beeinflussen zu können – doch technisch revolutionierten sie diese Waffengattung (die später teilweise auf Atomkraft umsteigen wird). Es wird zwar tatsächlich noch mit dem Bau von 120 Stück der 76,7 m langen U-Boote mit einer Wasserverdrängung von 1.819 t (getaucht) begonnen, doch in Betrieb genommen werden am 19.04.1944 nur zwei davon. Die mit drei Bänken von jeweils 124 Batterie-Zellen bestückten Boote erreichten unter Wasser eine Geschwindigkeit von 17,2 Knoten.

Ein frühes, elektrisches Ein-Personen-Unterseeboot wird 1938 von Barney Connett aus Chicago gebaut, es gilt als eines der weltweit kleinsten U-Boote seiner Zeit und ist zwei Batteriebänken ausgerüstet. Barney unternimmt mit seinem als Fisch bemalten Boot mehr als 300 erfolgreiche Tauchgänge bis in eine Tiefe von gut 9 m, bei denen er Strecken bis zu 22 km zurücklegt.
Joe Gilpin, ein Erfinder als Hollywood, macht Mitte 1948 von sich reden, als er sich lässig auf einer Art batteriebetriebenem Skateboard über das Wasser tragen läßt. Die Ruder sind beidseitig auf halber Länge angebracht.

An der Entwicklung seines knapp 75 kg schweren, 3,8 m langen und 17,5 cm dicken Motorboards, das mit 8 Batterien ausgestattet ist, hat er vier Jahre lang gearbeitet. Er erreicht damit eine Geschwindigkeit von 11,2 km/h, kann das Gerät bis zu 8 h lang betreiben und dann über Nacht wieder aufladen, und will die Teile nun für jeweils 345 $ auf den Markt bringen.
In der Augustausgabe 1954 des US-Magazins Mechanix Illustrated wird auf mehreren Seiten die Innovation eines gewissen Ralph E. McCabe vorgestellt, der sich seit 1948 damit beschäftigt, Schiffe auf offener See mit der Energie des Salzwassers selbst (als Elektrolyt) zu betreiben.
Hierfür entwickelt er eine Salzwasser-Batterie mit Kohlenstoff-Graphit-Platten für den positiven, und eine Nickel-Zink Elektrode für den negativen Pol. Die Batterie ist tatsächlich leistungsstark genug um ein kleines Boot anzutreiben. Im Laufe dieser sechs Jahre konstruiert und testet er 36 Modellboote.
Sein aktuelles Boot Eighth Wonder of the World, das auch in dem Magazin vorgestellt wird, ist 47 cm lang und wird von seiner 1 V/3 A Batterie auf eine Geschwindigkeit von 8 km/h beschleunigt. Die Salzwasser-Batterie kann horizontal oder vertikal unter dem Schiffsrumpf angebracht werden, wobei die Bewegung des Bootes für ihre fortlaufende Durchströmung mit Meerwasser sorgt. Um für seine Erfindung Werbung zu machen plant McCabe eine Reihe von Bootswettrennen zu veranstalten... doch trotzdem hört man später nie wieder von ihm - oder von seiner Inovation.
Im Folgenden gebe ich einen Überblick über den aktuellen Stand der Technik seit den 1980er Jahren, denn im Grunde nimmt das Interesse an E-Booten erst zu diesem Zeitpunkt wieder zu, gefördert durch die Einfuhr von günstigen Elektro-Außenbordern und motiviert durch den Gedanken an den Umweltschutz. 1982 wird von Admiral Lord Percy Gick und Lord St. Davids die Electric
Boat Association (EBA) gegründet. Doch es gibt einige Firmen, die zu diesem Zeitpunkt schon mehrere Jahre Erfahrung vorweisen können.
Die Bootswerft Heistracher beispielsweise, mit Standort am Chiemsee in Bayern, baut bereits seit 1957 Motorboote mit Elektroantrieb, da die Genehmigungen für Motorboote am Chiemsee schon damals beschränkt wurde. Die Motoren der Boote wurden mit der Zeit immer stärker, von anfänglich 300 W wuchsen sie auf inzwischen ca. 4 kW an. Nachdem Mitte der 1990er Jahre zuverlässige elektronische Steuerungen verfügbar wurden, stiegen die Leistungen weiter an – bis auf heute ca. 50 kW. Die 8,20 m langen Boote wiegen mitsamt ihren Bleiakkus 1,4 t und sind 18 km/h schnell. Die neuen Modelle werden nun auch mit Lithiumbatterien ausgerüstet, die allerdings merklich teurer sind. In Verbindung mit dem Kohlefaser-Leichtbau der Boote kommt man damit allerdings auch in sehr viel höhere Geschwindigkeitsbereiche.
Auch die Schweizer Boesch Motorboot AG am Zürichsee rüstet Sportboote auf Wunsch mit Elektromotoren und Lithium-Polymer-Batterien aus, wie sie normalerweise für Handys genutzt werden. Der 50 kW leistende Kräutler Drehstrommotor ist dabei so effektiv, daß das Elektroboot als Zugfahrzeug für Wasserskiläufer genutzt werden kann. 12.000 Handy-Akkus aus asiatischer Produktion, die zu 12 Batteriebänken mit 252 V zusammengefasst sind, speichern beim 6,50 m langen Boesch Electric Power 620 eine Kapazität von 120 Amperestunden. Der für vier Jahre Lebensdauer garantierte Batteriesatz kostet rund 40.000 €, und bislang haben über zehn Eigner ein 620er oder das kleinere, knapp 5,70 m lange Elektroboot 560 gekauft.
Schon 1970 installiert der 16-jährige Marshall ‚Duffy’ Duffield auf Vorschlag eines Freundes den Elektromotor eines Golf-Carts in das Boot seines Vaters, um sich die Mühsal mit dem immer wieder ausfallenden Benzinmotor vom Hals zu schaffen.

Als Jahre später der damalige Präsident der Trojan Batterie Co. Ray Godber auf das (mit Trojan-Batterien ausgestattete) Boot aufmerksam wird, finanziert er sofort den Bau eines Prototypen mit neuem Design. Seit 1998 hat die Duffy Electric Boat Co. in Adenalto, Kalifornien, gemeinsam mit der Trojan Batterie Co. über 3.000 Elektroboote für den kalifornischen Markt in Orange County, aber auch für Kanada, Mexiko, Europa und Fernost gebaut.
Die sieben Modelle reichen von dem kleinen Duffy Cat 18 bis zu Booten der Aquabus-Größe, die Länge variiert zwischen 4,20 m und 6,30 m. Alle Schiffe besitzen speziell für den Einsatz auf See entwickelte 5 PS Elektromotoren von Advanced DC Motors, die eine Geschwindigkeit von gut 10 km/h erlauben, und sind mit 6, 8 oder 12 Batterien ausgestattet. Bei einer Geschwindigkeit von 6,5 km/h beträgt die Reichweite 8 Stunden. Zur Vermeidung von elektrolytischer Korrosionseffekten wird die Edelstahlschraube über einen Riemen angetrieben. Mitte 2011 startet der Wassertaxi-Service von The Pearl in Katar mit einem Duffy Elektroboot.
In den 1980ern entwickelt Rupert Latham im britischen Wroxham mit seinem Frolic electric launch einen neuen Elektroantrieb für Boote. Seitdem hat er etwa 200 Stück davon verkauft.
Das möglicherweise erste ‚richtige’ Solarboot in Deutschland baut der Erfinder Heinz Hayn bereits 1983. Drei Jahre später fährt er mit seinem solarbetriebenen Katamaran den Nil hoch – 1.000 km weit. Als ich ihn 2005 kennen lerne, arbeitet er gerade an einem Wasserstoffantrieb für Boote.
Bei Solarbooten handelt es sich ja ebenfalls um Elektroboote – die nur zusätzlich noch ein unabhängiges, sauberes und geräuschloses Kraftwerk mit sich führen, das ihre Akkumulatoren stetig mit kostenloser Energie von der Sonne auflädt.

Die Firma International Venturecraft (IVC) baut ab 1986 elektrisch betriebene Sport-Unterseeboote für 1, 2, 3 und 6 Personen (bis 2010 über 200 Stück). Die Palette reicht vom kleinsten Modell SportSub Solo für 32.000 $ über ein Surveillance Sub für 83.000 $ bis zum größten Modell TourSub, das dann auch schon 520.000 $ kostet.
Das für 1 Person ausgelegte SportSub Solo beispielsweise wiegt rund 70 kg, kann bis zu eine Stunde lang in eine Tiefe von 10 m tauchen und wird von zwei drehbaren Propellern wie ein Hubschrauber bewegt.
Ein besonderes Elektroschiff ist die Vaporetto Elettrico E-1 in Venedig. Das 1989 in Betrieb genommene Schiff ist 23 m lang, 4,6 m breit, wiegt 35 t und bietet Raum für 208 Passagiere. Aufgrund der langen Ladezeiten wird es jedoch drei Jahre nach Inbetriebnahme wieder ausgemustert.

Ebenfalls 1989 fährt Lady Fiona, Countess of Arran, im Alter von 71 Jahren (!) in ihrem Elektro-Rennboot An Stradag mit 81,83 km/h einen Geschwindigkeitsweltrekord für E-Boote, der lange Zeit ungeschlagen bleibt. Das Schiff wird bis Anfang 2005 im Lakeland Motorboat Museum in Cumbria ausgestellt, dann kauft es Henry Engelen und läßt es von der Bootswerft Henwood & Dean's nahe Henley überholen und ausbauen. Es bekommt vier neue 25 kW Motoren des indischen Herstellers Agni Motors, sowie Exide AS45R 12 V Batterien von Chloride Motive Power.
Mit der Pilotin Helen Loney an Bord fährt das Boot des Electric Record Team UK mit 109,55 km/h Durchschnittsgeschwindigkeit und 113,11 km/h Spitze am 01.11.2005 einen neuen Weltrekord ein. Für einen weiteren Rekordversuch arbeitet das Team an dem Elektro-Rennboot Firefly (s.u.).

1989 beginnt auch die Firma Systec in Spay am Rhein mit Unterstützung des BMFT die Entwicklung – und ab 1991 den Bau des ‚ersten serienmäßig hergestellten’ Solarboots auf einer Bootswerft in Bad Zwischenahn. Der 7 m lange Solist ist mit 9 m2 Solarzellen und einem 3 PS Elektromotor bestückt, was eine Geschwindigkeit von 10 km/h erlaubt; er bietet Platz für 4 bis 6 Personen und soll für 120.000 – 140.000 DM angeboten werden. Die Ladezeit der Batterien beträgt allerdings 2 Tage, vermutlich mit ein Grund, daß es mit der Serie dann anscheinend doch nichts wurde, obwohl das Boot 1992 verschiedentlich auf Probefahrten vorgestellt wird.

Im September 1989 wird am Berliner Pichelssee das Solarboot Anna getauft, das bereits vor zwei Jahren von der Bootsbaufirma Adlung & Kaiser auf Kiel gelegt worden war.
Auf dem Dach des Bootes für 10 – 12 Personen befinden sich 20 Solarpaneele mit insgesamt 1 kW Leistung, die Batterie alleine läßt einen Wasserweg von 60 km zu. Von den Baukosten von 100.000 DM entfallen 14.000 auf die Solarzellen. Das BMFT stiftet einen Datenlogger, um günstig an Erfahrungswerte zu kommen.
Zu dieser Zeit fährt auch über den Bodensee schon ein Solarboot – die 7,2 m lange Korona von Christian Schaffrin, die bis zu 6 Personen befördern kann und deren knapp 10 m2 Solarzellen einen 3 PS Motor versorgen, der das Boot bis zu einer Geschwindigkeit von 12 km/h antreiben kann. Die Batterien erlauben eine Reichweite bis 70 km, bei Sonnenschein ist die Reichweite prinzipiell unbegrenzt.
Die Korona hatte schon 1988 die erste Solarboot-Regatta auf dem Neuenburger See in der Schweiz gewonnen. Der Entwickler erwartet, noch in diesem Jahr mit einer nach seinen Erkenntnissen gebauten 100.000 DM Solaryacht in Serie gehen zu können.
Die 1990er Jahre
1993 wird die 1. deutsche Solarboot-Meisterschaft durchgeführt,
bei der Thomas Meyer mit seinem Berliner Kanu Carl alle
Rennen gewinnt.
Ebenfalls ab 1993 fördert die Bundesstiftung Umwelt mit über 1,2 Mio. DM eine Umweltinformationskampagne zum Thema ‚Tourismus und Wassersport am Bodensee’ – bei der für Solarboote geworben wird. Im selben Jahr beginnt der 1991 gegründete Verein zur Förderung von Solartechnik im Wassersport- und Freizeitbereich Berlin-Köpenick e.V. mit den Vorarbeiten zum Bau einer Solarstrom-Tankstelle für Solarboote, die dann 1995 als ‚Weltneuheit im Rahmen der Weltklimakonferenz’ im (sehr abgelegenen) Strandbad Wendenschloß mit ihrem Betrieb als Vermietstation für 20 Solarboote mit 2 oder 8 Sitzen beginnt – allerdings nur zwei Jahre lang. Später wird daraus der ‚Solarpavillon Köpenick’ (s.u.).
1993 findet auch zum ersten Mal eine Solarboot-Europameisterschaft statt.

Die ersten kommerziellen Solarschiffe werden 1995 von
MW-Line im schweizerischen Yverdon gebaut. Die 8,5 m langen Solifleur und
die Chlorophylle sind jeweils für
12 Personen angelegt, haben einen 824 W Solargenerator sowie einen
4 kW Motor, und werden von Pro Natura für Touren über
den See von Neuchatel genutzt. Ihre Batteriereichweite beträgt
3,5 h bei einer Fahrtgeschwindigkeit von 10 km/h. Später bekommen
die Schiffe die Bezeichnung Aquabus 850,
und MW-Line baut weitere drei Stück vom Modell Aquabus
1050 (s.u.) für den Genfer See, die jeweils 25
Passagiere befördern können. Sie sind seit 1999 dort
im Einsatz, ein viertes Boot in Milano. Das Unternehmen elektrifiziert
allerdings auch andere Schiffe, wie beispielsweise die 20 m lange Bécassine.
Ende 1995 wird in Venedig auf dem Canal Grande das erste
mit Sonnenenergie betriebene Vaporetto in Betrieb genommen. Diesmal folgt
anscheinend keine schnelle Ausmusterung wie beim elektrischen Vorgänger.

Ab 1995 entwickelt und konstruiert die Firma SEAmagine Hydrospace Corp. elektrisch betriebene Tauchgeräte für 2 – 3 Personen und Tauchtiefen bis über 900 m. Die Besonderheit der Systeme besteht aus ihrer kugelförmigen Acrylglas-Kabine, in der normaler Luftdruck herrscht. Hier abgebildet ist das Model OV1.
Am 20. März 1996 startet der Japaner Kenichi Horie mit seinem Solarboot Malt’s Mermaid im ecuadorianischen Hafen Salinas – und erreicht nach 183 Tagen Ende August wohlbehalten Tokio.

Malt's Mermaid
Die Solarzellenpaneele liefern 1,5 kW an die Nickel-Wasserstoff-Batterien, die wiederum das Boot antreiben und Kühlschrank, Videokamera und Funkgerät versorgen. Das Boot selbst besteht teilweise aus 27.000 leeren Bierdosen – ein klarer Hinweis auf den Hauptsponsor, einen Bierhändler. Horie hatte schon 1964 unter dem Titel Kodoku – Sailing alone across the Pacific den Erfahrungsbericht seiner ersten Überquerung 1962 veröffentlicht, 1999 fährt er dann mit der aus recycelten Bierfässern bestehende Malt’s Mermaid II von San Fransisco aus nach Japan – und 2002 mit der Malt’s Mermaid III wieder retour.
Elektrisch angetriebene Klein-U-Boote für Forschungszwecke gibt es bereits seit den 1980er Jahren. In den 1990ern wird ihre Entwicklung zunehmend durch das Interesse der Filmindustrie gefördert. Als Aufnahmeplattform für IMAX Film baut die US-Firma Hawkes Ocean Technologies (H.O.T) in der San Francisco Bay Area 1997 die Wet Flight, die mit einem 10 kW Motor ausgestattet ist, dessen Batterien Arbeitszeiten bis zu 10 Stunden erlauben, bei einer Tiefe bis zu 150 Fuß.

Vom selben Unternehmen ließ sich übrigens Steve Fossett das Tiefsee-Tauchboot Deep Flight Challenger entwickeln und bauen, mit dem er bis in 37.000 Fuß Tiefe vorstoßen und damit einen ultimativen Tauchrekord setzen wollte. Durch seinen unerwarteten Tod im September 2007 konnte dieses Projekt jedoch nicht verwirklicht werden.
Der erste speziell für den Solarbetrieb komplett neu entwickelte Boot wird erstmals 1997 von der Sulzer Kopf AG vorgestellt. Das futuristische Design der Ra 31 begeistert – auch wenn es eindeutig ein ‚Schönwetter-Boot’ ist. Ich komme etwas weiter unten noch auf die gesamte Produktpalette des Unternehmens zu sprechen.
Im Mai dieses Jahres geht die erste Solartankstelle für Elektroboote in Brandenburg in Betrieb, die für 37.000 DM errichtete 1,8 kW Anlage befindet sich auf einer Bootswerft am Großen Zernsee.

1998 stellt der traditionelle österreichische Bootsbauer SUEK GmbH einen solaren Katamaran für bis zu 58 Personen vor, der für touristische Fahrten auf der Donau eingesetzt wird. Die Sonnenschein wird später an die Saarbrückener Personenschiff GmbH verkauft. Sie ist 15 m lang, 3,9 m breit, wiegt 10 t und besitzt zwei Motoren von jeweils 6 kW, die von einem Solardach mit einer Leistung von 5 kW versorgt werden.

Ebenfalls 1998 gründet der Schiffbauingenieur Jörg Albrecht in Berlin die Firma Techno Consult als Ingenieursbüro für maritime Gutachten und Konstruktionen.
Zu den wichtigsten Projekten gehören ein solares Wassertaxi (bereits 1995 gemeinsam mit dem Designer Jan Sokoll entwickelt), der Suncat 2000 (unter der Leitung von Thomas Meyer und in Zusammenarbeit mit dem Designer Jan Petzold 1996 entwickelt), sowie das Konzept des über 40 m langen Solarschiffes Millennium One (gemeinsam mit Prof. Schneider von der UDK-Berlin, 1999). Zu diesem Zeitpunkt legt Albrecht auch das Konzept einer regulären Route für Wassertaxis zwischen der Fischerinsel in Berlin-Mitte und der Halbinsel Stralau vor, das jedoch am hartnäckigen Wiederstand der konventionellen Schiffahrtsanbieter scheitert, die der Nutzung der vorhandenen Anlegestellen zustimmen müssten.

2004 entwickelt Jörg Albrecht dann den Solarcruiser Mimbi für die Urwaldgebiete Südamerikas, ein multifunktionales Solarschiff, welches eine Kombination aus ‚Amazonas Kreuzfahrer’ und ‚Infrastrukturschiff’ darstellt. 2006 wird eine Kooperation mit dem Solarzellenhersteller Sharp ins Auge gefasst, denn Boote mit Elektromotoren sind noch immer ein Nischenprodukt, wie beispielsweise Zahlen vom Bodensee deutlich machen. Trotz strenger Abgasnormen gibt es um die Jahrtausendwende nur rund 580 Boote mit elektrischem Antrieb auf dem See, also gerade einmal 1 % aller motorisierten Wasserfahrzeuge!

1998 wird in Frankreich die Elektrofähre La Rochelle in der gleichnamigen Stadt in Betrieb genommen. Sie ist mit 660 kg Nickel-Cadmium Batterien (80 Ah) ausgestattet, was ihr eine Fahrzeit von 10 Stunden erlaubt. Der Katamaran besitzt 2 Stück 6 kW Motoren, wiegt 4,2 t und bietet 30 Personen Platz. Mit 10 m Länge und 3,5 m Breite kann das Schiff eine Höchstgeschwindigkeit von 15 km/h erreichen. Im April und Mai 2009 wird die Fähre durch zwei neue Solarboote namens Copernic und Galilée ersetzt, die eine Kapazität von 75 Personen haben. Die Gesamtinvestition beträgt rund 1,8 Mio. €.

Ende 1999 beginnen ebenfalls in Frankreich Ecole Navale und das Lycée La croix rouge mit ihrem Lestreol Projekt (von Lestr = Kessel, und Heol = Sonne). Es entsteht ein sehr ästhetisches, solarbetriebenes zweisitziges Boot, das 6,47 m lang und 1,67 m breit ist, es wiegt 160 kg .
Die Spitze erinnert unweigerlich an einen Militärjet – aber schließlich war ja auch die französische Marine maßgeblich an der Entwicklung beteiligt. Bei 6 kn Geschwindigkeit kann das Boot mit einer Batterieladung 3 Stunden lang fahren.

Eine der größten Werften für Solarschiffe ist die Kopf Solarschiff GmbH in Sulz am Neckar. Das Unternehmen war bereits 1975 in die Solartechnik eingestiegen. 1995 beginnt man in Kooperation mit der Universität Stuttgart und dem Designer Christoph Behling mit der Entwicklung eines Solarkatamarans, und im Jahr 2000 sind schon fünf Modelle im Angebot.
Eines davon ist der bereits erwähnte 9,4 m lange und 1,6 t schwere Katamaran RA 31 für 12 Personen. Die beiden jeweils 4,7 kW Motoren erlauben eine Fahrtgeschwindigkeit von 13 km/h mit Batterieunterstützung, und knapp 7 km/h im reinen Solarbetrieb. Das 100.000 DM Schiff wird ab Juni 1998 als Solarfähre auf dem Bodensee zwischen Gaienhofen in Deutschland und Steckborn in der Schweiz genutzt. Es wird später von einer 22 m langen RA 66 ersetzt, die schon 50 Personen nebst 20 Fahrrädern Platz bietet. Eine weitere RA 66 – in nur 6 Wochen gebaut (!) – ist auf dem Maschsee in Hannover im Einsatz.
Weiter mit den Elektro- und Solarschiffen...