Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und Solarfluggeräte
2016 (D)
Was die technischen Fortschritte in diesem Jahr anbelangt, so decken
diese einen sehr großen Bereich ab, wobei es aber auch zu einer Vielzahl
von Wiederholungen kommt, die ich deshalb nur kurz erwähnen werde.

Auf der CES im Januar 2016 stellt die Firma Autel
Robotics USA aus Bothell in Washington, die lokale Niederlassung
des chinesischen Mutterhauses Autel Intelligent Technology,
eine besondere VTOL-Drohne namens Kestrel vor, die sich
nach dem Senkrecht-Start in einen vorwärts fliegenden Starrflügler verwandelt.
Die Mutterfirma, die primär Kfz-Diagnosewerkzeuge herstellt, bietet zudem
mit dem X-Star selbst einen marktüblichen Kamera-Quadrokopter
an.
Die umgesetzte Technik, die eine längere Reichweite und größere Tragfähigkeit erlaubt, besteht aus vier Kipprotoren, die vorn und hinten an den Flügeln sitzen. In Verbindung mit der Fähigkeit, vertikal abheben und landen zu können, zielt die Dual-Mode-Drohne auf landwirtschaftliche und humanitäre Operationen, die oftmals keinen Platz für traditionelle Starts und Landungen bieten.
Der Kestrel hat eine Reichweite von bis zu 100 km, eine maximale Flugzeit von 2 Stunden, und erreicht eine Höchstgeschwindigkeit von 130 km/h. Als normale Fluggeschwindigkeit werden 70 km/h angegeben. Die viel Motoren haben zusammen eine Leistung von 4,8 kW.

Bei einem maximalen Startgewicht von 14 kg beträgt die Nutzlast 2 kg, und ein redundantes Sicherheitssystem sorgt dafür, daß das Fluggerät (als Segelflugzeug) sicher zu Boden gleitet, falls die Motoren ausfallen. Die Drohne soll voraussichtlich ab März 2017 verfügbar sein, der Preis ist noch nicht bekannt gegeben worden.
Auf der CES 2017 zeigt die Autel Robotics mit dem Prototyp des DragonFish eine neue Starrflügeldrohne, die vertikal abheben und eine Nutzlast von rund 6,5 kg tragen kann. Sie fliegt bis zu 100 Minuten lang und bis zu 30 km vom Controller entfernt, wobei sie ein 1.080-Pixel-Video zurückstrahlt.
Später kommt auch noch eine zusammenfaltbare Kameradrohne namens Robotics Evo hinzu, die ab Juni 2018 für 999 $ angeboten wird – gefolgt von einem weiterentwickelten Modell Robotics Evo II (Evo 2), das ab Januar 2020 für 1.495 $ auf den Markt kommt.
Ebenfalls im Januar 2016 wird über einen neuen Ansatz
berichtet, Drohnen in den städtischen Luftraum integrieren. Das System,
das an der University of Waterloo in Kanada entwickelt
wird, bildet einen konzeptionellen Rahmen für ein ,Internet von Drohnen’
- welches an das zunehmend aktuell werdende ,Internet der Dinge’ angelehnt
ist und Elemente der bestehenden Flugsicherungssysteme mit den Mobilfunknetzen
und dem Internet verbindet.
Das Papier der kanadischen Ingenieure schlägt eine eigene Terminologie für die Schlüsselkomponenten des Systems vor, wobei der Luftraum in ,Zonen’ aufgeteilt wird, die jeweils von einem ,Zonendienstanbieter, (Zone Service Provider, ZSP) verwaltet werden, der einen eigenen Luftraumbereich betreibt, was auch softwarebasiert geschehen kann.
Drohnen und Zonendienstleister kommunizieren über die Cloud, um sicherzustellen, daß der autonome Verkehr sicher durch diese Zone fließt, je nach den für diese Zone festgelegten Regeln. Geht eine Drohne in eine neue Zone über, wird sie in der gleichen Weise übergeben, wie ein drahtloses Gerät an einen anderen Mobilfunkturm übertragen wird, während es sich bewegt. Die Infrastruktur kann auch Dritten außerhalb der Zone (wie Administratoren, Einzelhändlern am Ende einer Lieferkette oder möglicherweise sogar Verbrauchern) erlauben, mit den Drohnen im Flug zu kommunizieren, was besonders für die vorgeschlagenen Lieferung-Dienstleistungen nützlich wäre.
Im gleichem Zusammenhang stehen die Arbeiten der Firma AT&T, über die im September 2016 berichtet wird. Dieses Unternehmen will mit Tests beginnen, um herauszufinden, wie sich ein Drohnen-Betrieb innerhalb seines kommerziellen 4G LTE Netzwerks bzw. der zukünftigen 5G Version verwirklichen läßt. Die Versuche unter realen Bedingungen sollen noch in diesem Monat am Qualcomm- Forschungszentrum bei San Diego starten.
In ihrer jetzigen Form verlassen sich Drohnen auf Wi-Fi-Netzwerke für die Kommunikation, was aber seine Nachteile hat. Jüngste Forschungen des Royal Melbourne Institute of Technology (RMIT) und der Edith Cowan University in Australien hatten zudem gezeigt, daß es meistens Pannen in der Kommunikationsverbindung sind, welche die Ursache für Drohnenunfälle bilden. Die Forscher hinter dieser Studie forderten daher robustere Kommunikationssysteme – deren Verwirklichung nun von AT & T angestrebt wird, in Zusammenarbeit mit der Firma Qualcomm Inc., deren Snapdragon-Prozessor die Drohnen betreiben soll.
Im Dezember 2016 folgen Meldungen über einen ähnlichen Ansatz, der von einem Team der Nanyang Technological University (NTU) in Singapur konzipiert wird. Das hier entwickelte Luftraum-Kontrollsystem für den Drohnenverkehr sieht spezielle Start- und Landezonen vor, während die Drohnen in der Luft durch festgelegte Korridore geleitet würden.
Im Prinzip möchte die NTU eine Art Straßensystem in der Luft aufbauen, wobei wichtige Orte wie Flughäfen und Kraftwerke per Geofencing geschützt werden sollen. Das Projekt ist auf vier Jahre ausgelegt. Die Konzeptualisierung sowie entsprechende Computersimulationen sollen 2017 abgeschlossen sein, die ersten Tests dann 2018 beginnen.

Auch die im Januar 2016 gegründete Firma DBX
Drones aus Valencia in Spanien stellt mit ihrer Drohne CarazBoX einen
kombinierten Starrflügler und Multikopter für professionelle Zwecke vor,
wie Mapping und Topographie, Präzisionslandwirtschaft, Rettung und Inspektion.
Außer dem abgebildeten Prototypen gibt es aber keinerlei weiteren Informationen oder technischen Details über das Fluggerät. Auch von Einsätzen ist bislang nichts bekannt.

Ein Modell mit ähnlichen VTOL-Eigenschaften stellen Forscher der TU
Delft im September vor. Dieses soll verwendet werden, um medizinische
Versorgung in schwer zugängliche Gebieten zu bringen. Auch der 4 kg schgwere delftAcopter in
Form eines Miniatur-Doppeldeckers nutzt einen Helikopter-Propeller, um
vom Boden abzuheben, und kippt dann, um wie ein Flugzeug weiter zu fliegen.
Mit einer 10.000 mAh Batterie an Bord kann das völlig autonome Flugzeug bis zu 60 Minuten lang in der Luft bleiben und eine Geschwindigkeit von bis zu 107 km/h erreichen. Es kann auch über die Sichtlinie des Betreibers hinaus fliegen und die Verbindung über eine Iridium-Satellitenverbindung aufrechterhalten, die von überall auf dem Planeten gesteuert werden kann, wie die Forscher behaupten.
Das Team beteiligt sich mit dem delftAcopter an der in diesem Monat stattfindenden Outback Medical Challenge in Australien, bei der es darum geht, ein autonomes Flugzeug zu bauen, das in der Lage ist, eine Blutprobe von einer gestrandeten Person zu beschaffen, die sich rund 30 km entfernt an einer unzugänglichen Stelle befindet. Mehr über diesen Wettbewerb findet sich unter Lieferdrohnen (s.d.).

Ebenfalls im Januar wird in den Blogs über ein Drohnenprojekt an der Rutgers
University berichtet, das die U.S. Navy mit rund 620.000 $ finanziert.
Dabei entwickelt Prof. Javier Diez einen Multikopter,
der sich in der Luft und unter Wasser fortbewegen kann und den die Navy
zur Aufdeckung von Minen verwendet werden will. Die ursprüngliche Meldung
der Universität stammt vom Oktober 2015.
Das Besondere an der Entwicklung ist, daß das Wasser eine viel höhere Dichte als Luft besitzt, womit sich die Propeller aufgrund des Bewegungswiderstands dort entsprechend langsamer gegen drehen müssen. Der Übergang zwischen Wasser und Luft kann die Rotoren dabei leicht überlasten. Als Lösung trägt der Naviator an jedem seiner vier Arme zwei Propeller. Die unteren können schon oder noch ins Wasser eintauchen, während die oberen das Gerät in Position halten. Dies erlaubt der Drohne, beliebig oft zwischen den Elementen zu wechseln.
Der Naviator ist allerdings noch nicht komplett ausgereift und kann derzeit nur ein paar Meter tief tauchen. Zudem einen nimmt die Signalfähigkeit unter Wasser stark ab, so daß er durch ein Kabel mit der Fernsteuerung verbunden bleiben muß, und auch die Manövrierfähigkeit ist noch stark eingeschränkt. Das Forscherteam um Diez hofft, daß die Probleme in einem halben Jahr behoben werden können und man die Unterwasser-Drohne dann auf den Markt bringen kann.
Eine weitere Drohne, die fliegen, schwimmen und tauchen kann, wird von
Wissenschaftlern der Oakland University entwickelt.
Als Proof-of-Concept kann sie ihre Fähigkeiten im Frühjahr 2015 erfolgreich
unter Beweis stellen – wird aber erst im Februar 2016 bekannt,
als der 3. Prototyp den in Dubai stattfindenden Wettbewerb Drones
for Good gewinnt. Der Gewinn der 1 Mio. $ wird möglicherweise
auch dadurch gefördert, daß drei der vier Team-Mitglieder arabischen
Ursprungs sind.
Der Loon Copter ist mit einem speziellen Behältnis ausgestattet, das unter anderem unter Wasser für Ballast sorgt und in dem Sensoren oder auch eine Kamera verbaut werden können. Mit der Landung auf der Wasseroberfläche, fungieren die Rotoren als Vortrieb für die Schwimmbewegung. Im dritten Modus geht es unter die Wasseroberfläche, wobei die Drohne nach vorn kippt und sich mit erheblich weniger Energieaufwand fortbewegt.
Die Drohne kann bisher nur wenige Meter unter der Wasseroberfläche gesteuert werden, benötigt dafür aber beim Übergang vom Tauch-Modus in den Flug-Modus keine Hilfe. Das mögliche Einsatzspektrum eines ausgereiften Produkts reicht von der Überwachung von Unterwasser-Pipelines bis zur Aufklärung von Unglücksfällen oder dem Aufspüren und Untersuchen von Ölteppichen auf den Weltmeeren.

Tatsächlich einsatzfähig sei eine Entwicklung des Applied Physics Laboratory
(APL) der Johns Hopkins University, das im März 2016 eine
tauchfähige Drohne namens CRACUNS vorstellt (Corrosion
Resistant Aerial Covert Unmanned Nautical System).
Die wasserdichte, aus 3D-gedruckten Teilen zusammengebaute Drohne kann z.B. an der Außenseite eines U-Bootes montiert und aus der Tiefe losgeschickt werden, um in den Himmel aufzusteigen und mittels Luftaufnahmen zusätzliche Informationen zu sammeln, ohne das Milliarden-Dollar-Schiff zu gefährden.
Die elektronischen Komponenten des Geräts sind entweder in wasserdichten Gehäusen geschützt oder, wie die vier Elektromotoren, mit einer preiswerten Beschichtung behandelt, die das Wasser in Schach hält. Dieser Ansatz hilft dabei, den Preis der Drohne erschwinglich zu halten, so daß sie auch als Einweg-Werkzeug eingesetzt werden kann, wenn die Situationen für größere Geräte zu riskant ist.
Während der Tests bleibt die Drohne zwei Monate in Salzwasser untergetaucht, ohne ihre Fähigkeit zu verlieren, anschließend wieder losfliegen zu können. Was bedeutet, daß die Drohnen in Küstengebiete heimlich von Flugzeugen fallen gelassen werden und für Monate unter Wasser verbleiben können, bevor sie eingesetzt werden, um ins Landesinnere zu fliegen, um Daten zu sammeln.

Eine Versuchsdrohne, die zusammenklappbare Flügel besitzt, um wie ein
Fische jagender Seevogel ins Wasser zu tauchen und Proben von unterhalb
der Oberfläche zu schöpfen – und dann wie ein fliegender Fisch wieder
zu starten, wenn es Zeit ist, zurückzukehren, wird im Dezember 2016 von
Wissenschaftlern des Imperial College London um den
Direktor des Aerial Robotics Labs Mirko Kovac präsentiert.
Die dünne, Raketen-förmige AquaMav Drohne wiegt nur 200 g und fliegt als Starrflügler durch die Luft, bis es Zeit ist ins Wasser zu tauchen, worauf sich die Flügel an den schlanken Körper falten und den Flieger durch die Oberfläche des Wassers stoßen und eintauchen lassen.
Nach dem Sammeln der Wasserprobe verwendet die Drohne einen internen Kohlendioxidbehälter und ein hohles Rohr, um einen starken Wasserstoß zu erzeugen. Das ist genug Schub, um sie aus dem Wasser zu heben mit der Geschwindigkeit zu starten, die benötigt wird, um wieder in zu gleiten. Auch diese Technik ist von der Natur inspiriert, diesmal durch die fliegenden Fische. Die AquaMav Drohne ist in der Luft 48 km/h schnell, wobei die Batterie eine Flugzeit von 14 Minuten bzw. eine Reichweite von etwa 5 km ermöglicht.
Im September 2019 folgt ein Bericht mit einigen abweichenden Details. Demnach sei der 160 g wiegende fliegende Fisch entwickelt worden, um in gefährlichen Umgebungen, wie z.B. bei Überschwemmungen, oder zur Überwachung der Meeresverschmutzung eingesetzt zu werden.
Um aus dem Wasser heraus zu starten und dann jeweils bis zu 26 m weit zu gleiten, hat der Roboter in der Brennkammer in seinem Inneren die winzige Menge von 0,2 g Kalziumkarbidpulver. Der Quelle zufolge ist der einzige bewegliche Teil des Roboters eine kleine Pumpe, die Wasser aus der Umgebung wie Seen oder Ozeanen einsaugt. Wenn das Wasser mit dem Kalziumkarbonat reagiert, setzt es brennbares Acetylgas frei, das sich ausdehnt, wenn es entzündet wird, und den Roboter nach oben drückt.
Bei Tests im Labor, in einem See und in einem Wellentank stellt das Team fest, daß er auch unter extremen Bedingungen aus dem Wasser steigen kann. Nachdem der Roboter seinen Tank mit Wasser gefüllt hat, kann er mehrere Male springen. Dadurch kann er über dem Wasser gleiten, um die erforderlichen Proben zu entnehmen, ohne zusätzliche Energie zu benötigen.
Das Team arbeitet nun mit Partnern in der Schweiz zusammen, um neue Fluggeräte mit fortschrittlichen Materialien zu bauen und Feldversuche in verschiedenen Umgebungen zu beginnen. Der Name AquaMav taucht inzwischen aber nicht mehr auf.

mit Range Extender
Zu den weiteren technologischen Neuheiten, die im Januar 2016 auf der CES vorgestellt werden, gehört ein Hexakopter des chinesischen Drohnenherstellers Guangzhou Walkera Technology Co. Ltd. (Walkera), der Flugzeiten von bis zu zwei Stunden möglich macht.
Gemeinsam mit dem Mikrogenerator-Produzenten GeneratorSmart war hierfür ein neuer Hybrid-Antriebsstrang für den professionellen Hexakopter QR X900 von Walkera gebaut worden, der als Range Extender fungiert. Dabei lädt ein winziger, leichter und effizienter Methanol-Motor die Batterie während des Fluges auf, so daß lange Flugzeiten und eine sofortige Betankung möglich sind.
Mit einem Gewicht von nur 1,2 kg liefert der Generator eine Spitzenleistung von 1,5 kW. Und anstatt nach dem Flug mehrere Stunden an einem Ladegerät angeschlossen zu werden, reicht es den Kraftstofftank füllen, um sofort wieder in die Luft gehen zu können. Bei Bedarf kann der Motor auch ausgeschaltet werden, um die Drohne allein im Batteriebetrieb bis zu 16 Minuten im ,Stealth-Modus’ zu betreiben.
GeneratorSmart bietet verschiedene Methanol-Generatoren zu Preisen zwischen 2.000 $ und 2.500 $ an, während Walkera eine ganze Reihe von Kamera-Drohnen anbietet, wie z.B. das Modell Voyager 4, das aufgrund seiner 18-fachen optischen Zoom-Kamera als fliegendes Teleskop bezeichnet wird – oder die Standardausführung des QR X900 für 4.399 $. Daneben werden auch kleine und günstige Renn-Drohnen angeboten.

In Bezug auf hohe Geschwindigkeit berichten die Blogs im Februar 2016 über
ein Experiment von Dirk Brunner, der herausfinden will,
welche maximale Steigleistung ein Quadrokopter erreichen
kann.
Mit einer Antriebsleitung von 2,3 kW geraten die vier kleinen Elektro-Motoren zwar an ihr Limit, doch die leistungsstarke Drohne steigt in 3,871 Sekunden aus dem Knie-hohen Schwebeflug in 100 m Höhe auf – was für einen verdienten Eintrag in das Guinness-Register reicht, denn einfach war dieser nicht erzielt worden.
Schon die im Vorfeld angestrebte maximale Auslastung sämtlicher Komponenten forderte ihren Tribut. So fielen bei Probeflügen Motoren aus, was zum Absturz der Drohne führte. Und auch beim Rekordflug selbst kommt es zum Funkenflug bei den Motoren, dicht gefolgt von rauchender Elektronik, wie auf dem entsprechenden Videoclip zu sehen ist. Die aktuelle Rekordsteigleistung einer Drohne liegt nun bei 190 km/h.

der DARPA
Im gleichen Monat veröffentlicht die Defense Advanced Research
Project Agency (DARPA) das Video eines autonom manövrierenden
Quadrokopter-Prototyps, der mit 72 km/h durch Korridore fliegt und dabei
selbständig Hindernissen ausweicht. Die im Rahmen des Fast-Lightweight-Autonomy-Programms
entwickelte Flug-Drohne soll zur Aufklärung in Gebäuden eingesetzt werden
und mit der angepeilten Geschwindigkeit von 20 m/s durch Korridore und
Treppenhäuser navigieren.
Ziel des Projekts war eine Drohne, die durch Fenster paßt, unabhängig von GPS ist und ohne einen menschlichen Piloten auskommt – weshalb sie Kameras sowie Trägheits-, Sonar- und LIDAR-Sensoren verwendet. Außerdem hat sie einen Autopilot des Typs Pixhawk von 3D Robotics an Bord.
Im Juli stellt ein Privatunternehmen allerdings eine beträchtlich schnellere
Drohne vor. Der Teal von George Matus und
seiner Firma Teal Drones Inc. in Utah ist ein leistungsfähiger,
leichter Kamera-Quadrokopter, der gleichzeitig als die weltweit schnellste
seriengefertigte Drohne angepriesen wird.

Mit seinem 1.800 mAh Akku erreicht der Teal eine maximale Geschwindigkeit beim Horizontalflug von über 110 km/h, unter günstigen Umständen seien sogar schon 136 km/h erreicht worden. Die Flugzeit beträgt 10 Minuten. Elementar sind ein modulares Stecksystem der Arme, ins Design eingearbeitete steckbare Batterien und ein kompakter Aufbau, der in wenigen Handgriffen für unterschiedlichste Anwendungsfälle angepaßt werden kann.
Der 730 g schwere Flieger, der eine Nutzlast von 500 g erlaubt, besitzt zudem einen leistungsstarken Onboard-Computer, um auch fortgeschrittene Anwendungen ausführen zu können, die eventuell maschinelle Lernalgorithmen beinhalten. Sein Preis beträgt 1.299 $.
2017 zeigt Teal eine Sportversion als Prototyp, die sich als Racer aber nicht durchsetzen kann. Es dauert nach dem Start noch zwei Jahre, bis das Unternehmen 2018 endlich bereit ist, die inzwischen Teal One genannte Version 3.0 der Drohne auch zu verkaufen – zu einem Preis von knapp 1.200 $.
Was bei den autonom agierenden besonders wichtig ist, sind Strategien
zur Kollisionsvermeidung. Im Januar kündigt das Computer
Science and Artificial Intelligence Lab (CSAIL) des MIT neue
experimentelle Drohnen-Software an, welche die Fluggeräte zukünftig
davon abhalten soll, jemals wieder in einem Baum zu landen.
Die Technik könnte jede Drohne in ein Hindernis vermeidendes Fluggerät verwandeln, das mit lebensähnlichen Reflexen ausweichen und wie ein flinker Kolibri Schleifen um Bäume oder Gebäude fliegen kann. Das Team testet die Software erfolgreich mit zwei Arten von Drohnen, einem Quadrokopter und einem Starrflügler.
Um im Kontext zu bleiben: Mit der Kollisionsvermeidung beschäftigt
sich ebenso ein Team der schwedischen Universität Lund um Emily
Baird, das im April darüber berichtet, wie die überlegene Hindernisvermeidung
der Bienen – trotz ihres schlechten Sehvermögens – zu intelligenteren
Drohnen führen kann. Die Forscher haben demnach die Tricks aufgedeckt,
die die Tiere anwenden, um in dichten Wälder mit vielen Ästen und Blättern
zu navigieren, ohne in Schwierigkeiten zu geraten.
Als sie die grüne Orchideenbiene in Aktion untersuchen, entdecken die Wissenschaftler, daß das Insekt die Lichtintensität mißt, die durch die Löcher im Laub des Regenwaldes dringt, um herauszufinden, ob sie groß genug sind, um hindurchzukommen oder nicht. Anhand der Helligkeit machen die Insekten die Stellen ausfindig, an denen sie den größten Abstand zu den Rändern haben. Die denkbar einfache Strategie bietet die Grundlage für ein schnelles, rechnerisch einfaches und effizientes Modell für die Navigation, das es kleinen Robotern ermöglichen könnte, ohne menschliche Hilfe durch unübersichtliche Umgebungen zu fliegen.
Dazu muß jedoch zunächst einen Weg gefunden werden, die Visualisierungen des Insekts mit mathematischen Modellen und digitalen Systemen abzubilden. Hierzu wird versucht, mit Hilfe von Synchrotronstrahlung ein dreidimensionales Bild von dem zu zeichnen, was die Bienen sehen. Eine Umsetzung der Erkenntnisse wird allerdings erst in 5 – 10 Jahren erwartet.
Ebenfalls im Januar berichten Wissenschaftler vom Institut für Robotik
und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt (DLR)
in Oberpfaffenhofen-Weßling, daß sie erstmals erfolgreich einen autonomen
Starrflügler auf einem 75 km/h fahrenden Pkw haben landen lassen.

in Fahrt
Das System ist für zivile Anwendungen in den Bereichen Fernerkundung und Kommunikation konzipiert. Es könnte beispielsweise für ultraleichte Solarflugzeuge angewendet werden, die in Katastrophenfällen klassische Satellitensysteme ergänzen. Der Sinn der Landetechnik besteht darin, daß damit auf das Landefahrwerk verzichtet werden kann. Der Flieger könne so erheblich mehr Nutzlast tragen und eine größere Reichweite bekommen.
Das System wird auf einem Flugplatz im schwäbischen Mindelheim-Mattsies mit einem gut 3 m großen und 20 kg schweren, elektrischen Starrflügler des Modells Penguin BE der 2009 gegründeten Firma UAV Factory Ltd. aus Marupe in Lettland getestet. Als mobile Landeplattform wird ein 4 m langes und 5 m breites Netz mit mehreren optischen Markern auf dem Dach eines PKWs aufgespannt.
Das Fluggerät kann sich bis auf einen halben Meter genau über dem Netz positionieren. Befinder es sich darüber, erkennt das optische Multi-Marker-Tracking-System die Landevorrichtung und bestimmt die relative Position zum Bodenfahrzeug. Dann landet der Flieger computergesteuert. Da sich Pkw und Flieger gleich schnell bewegten, handelt es sich eher um ein Absetzen.

Während der Flugversuche sitzt ein Fahrer im Auto, der über ein Display Steuerkommandos erhält, damit er schneller oder langsamer fährt. Denkbar sei aber auch, ein autonomes Fahrzeug ohne Fahrer zu verwenden. Die Arbeiten werden durch das EU-Projekt EC-Safemobil unterstützt.
Was die UAV Factory (später: Edge Autonomy) anbelangt, so hatte das Unternehmen seine erste Penguin B Drohne im Jahr 2010 ausgeliefert, die hier aber nicht detailliert behandelt wurde, da sie brennstoffbetrieben ist. Mit einer Flugzeit von 54 Stunden und 27 Minuten stellt sie 2012 einen Weltrekord im Dauerflug auf. Der Start erfolgt mit einem pneumatischen Katapult.
Ab 2013 erfolgt die Entwicklung der Penguin C, die zwei Jahre später ausgeliefert wird; 2018 der Erstflug der Penguin C VTOL; und 2019 der Jungfernflug der Penguin C Mk2. Dieses 32 kg schwere Modell mit Benzinmotor erreicht eine Flugzeit von über 14 Stunden und hat eine Nutzlastkapazität von 4,5 kg.
Außerdem besitzt diese Drohne ein zum Patent angemeldetes, einziehbares VTOL-Rotorsystem, weshalb sie hier erwähnt wird: Bei Nichtgebrauch werden die Rotoren parallel zu den Auslegern verriegelt, und automatische Hauben schließen sich, so daß die Baugruppe wesentlich aerodynamischer wird. Durch die Verringerung des Luftwiderstands im Horizontalflug erhöht sich die Flugdauer um 20 %.

(Grafik)
Ein besonders ästhetisches Design hat die Atlas genannte
Drohne des Designers Anton Weaver aus Portland, Oregon,
die im Februar 2016 veröffentlicht wird.
Die vollständig autonome Drohne mit Hindernisvermeidung, Atemsensoren, Computer Vision und maschinellem Lernen ist für Such- und Rettungsaufgaben sowie für Sicherheits- und Dauerüberwachung gedacht.

(Grafik)
Unter dem Label ‚Atlas von Drono‘ kombiniert die Drohne die Ultrabreitband-Radartechnologie mit der Computer Vision der Firma Drono, um eingestürzte Gebäude und eventuell darin eingeschlossene Menschen zu erkennen.
In späteren Jahren zeigt Weaver noch diverse weitere Designs, darunter 2021 die Hammerhead Kamera-Drohne mit vier Propellern und einem Rahmen, der Schutzringe um jeden Propeller bildet, sowie die nur 400 g schwere, kugelförmige Jupiter (o. Xphero), die mit zwei Kameras 360°-Aufnahmen machen kann und wie eine magische schwebende Kugel aus einem Science-Fiction-Film aussieht.
Diese Drohne nutzt einen großen Einzelpropeller und vermutlich ein internes Gyroskop, um sich in der Luft zu bewegen, aufrecht zu bleiben, zu drehen und zu wenden.
Bekanntermaßen müssen die Piloten von unbemannten Fluggeräten immer Sichtkontakt
zu ihnen halten, was die Einsatzmöglichkeiten, etwa zur Paketauslieferung,
bislang einschränkt. Im Mai 2016 stellen die Blogs
ein neues Gerät von der Größe eines Taschenbuchs vor, das den Drohnen
deutlich mehr Bewegungsfreiheit verschaffen kann.
Das von dem 2014 durch Eben Frankenberg und Tom Driscoll gegründeten Start-Up Echodyne Corp. aus Bellevue, Washington, entwickelte neue Gerät namens MESA-K (Metamaterial Electronically Scanning Array) basiert auf einer Technologie, mit der sich jene komplexen Antennen-Arrays vereinfachen und verkleinen lassen, die in Radar-Scansystemen von Militär- und Zivilflugzeugen zum Einsatz kommen. Möglich wird dies durch die Verwendung von Antennen auf der Basis neuartiger Metamaterialien, d.h. speziell entworfene Strukturen, die elektromagnetische Signale ganz anders behandeln als konventionelle Metalle und andere Stoffe.

Konventionelle Radarscanner waren für die Kontrolle von Drohnen zwar schon getestet worden, erwiesen sich aber zu groß und zu teuer, als daß sie Drohnen helfen konnten, andere Fluggeräte zu erkennen. Bislang kann MESA-K nur Objekte in maximal 500 m Entfernung erkennen, da das System so ausgelegt ist, daß es nicht nur in Drohnen, sondern zum Beispiel auch in autonomen Autos eingesetzt werden kann. Eine zweite Version speziell für Drohnen und mit bis zu 3 km Reichweite soll aber noch in diesem Jahr verfügbar werden.
Die Echodyne, die mit 15 Mio. $ Kapital von Investoren wie dem Microsoft-Mitgründer Bill Gates arbeitet und sowohl von der Homeland Security als auch der US-Navy unterstützt wird, will das neue Gerät in etwa einem Monat einer Reihe von nicht namentlich genannten Unternehmen zum Testen zur Verfügung stellen. Doch ganz so schnell geht es dann aber nicht.
Im November meldet Echodyne den ersten erfolgreichen Radar-Wahrnehmungs- und Ausweich-Test (Detect and Avoid, DAA) seines Geräts, das an eine kommerzielle Drohne montiert wird, die für die Infrastruktur-Inspektion, die landwirtschaftliche Überwachung und/oder die Paketlieferung geeignet ist. Über einen Zeitraum von mehreren Tagen fliegt die Drohne über 400 Missionen.

Während der Testmissionen scannt das Radar erfolgreich ein breites Sichtfeld sowohl im Azimut als auch in der Höhe (bis zu 120° x 80°) und verfolgt mehrere Arten von Flugzeugen, einschließlich eines kleinen UAV, einer Beechcraft-Bonanza und eines Ultralight-Flugzeugs, welche seinen Luftraum durchfliegen. Das Radar liefert einen ,4D-Datenwürfel’ aus Radarechos, der genau die Bodenvegetation, eventuelle Stacheldrahtzäune und andere stationäre Hindernisse sowie die Flugbahnen der verfolgten Fluggeräte darstellt.
Bei dem Test wird das Entwickler-Radar-Kit von Echodyne verwendet, der Vorläufer des neuen MESA-DAA-Radars, der Objekte von der Größe einer Cessna in einer Entfernung von bis zu 3 km, und kleine Drohnen in bis zu 750 m Entfernung erkennt und verfolgt. Es kann sein gesamtes Sichtfeld einmal pro Sekunde scannen, Updates verfolgter Objekte werden fünf mal pro Sekunde gemacht. Das Gerät wiegt unter 750 g und benötigt etwa 30 W.
Zudem führt Echodyne Gespräche mit der FAA und der NASA, in der Hoffnung, daß diese bald die Spezifikationen für ein Radarsystem veröffentlichen, das unbemannte Flüge über die Sichtlinie hinaus ermöglicht. Die FAA, die im Laufe der Jahre elektro-optische, Infrarot-, LiDAR- und Computer-Vision-Systeme gesehen hatte, scheint jedenfalls davon überzeugt zu sein, daß Radar das beste System sei. Es funktioniert bei jedem Wetter, hat lange Reichweiten, es mißt den Standort des Ziels direkt, und es mißt die Geschwindigkeit direkt. Nur hatte niemand gedacht, daß es jemanden gelingen könnte, die erforderliche Technologie klein, leicht und billig genug zu machen.
Das MESA-DAA wird Anfang 2017 für gewerbliche Kunden zur Verfügung stehen. Bis dahin wird zumindest schon mal eine Abbildung des MESA-K-DEV veröffentlicht, das nur etwas größer als ein Smartphone ist. Der gegenwärtige Preis von rund 10.000 $ soll bei Massenherstellung signifikant sinken. Getestet wird das System u.a. beim Super Bowl in Atlanta im Januar 2019.
Im Mai 2016 findet der erste Drone Hero Europe statt,
ein internationaler Wettbewerb für europäische Unternehmen, Organisationen
und Einzelpersonen, die einen innovativen Geschäftsansatz verfolgen,
der mit der Drohnentechnologie zu tun hat.
Der Wettbewerb wird von der European UAV Knowledge Area (EUKA) mit Sitz in Belgien organisiert. Gewinner ist Laurent Eschenauer, Entwickler der kugelförmigen Drohne Fleye (s.u. 2015).
Im Juni 2016 folgen Berichte über eine von Intel entwickelte
Kollisionsvermeidungs-Technologie, die in dem neuen Typhoon H
Pro Hexacopter von Yuneec zum Einsatz kommt. Die RealSense-Technologie verwendet
Ultraschallsensoren, um die Distanz zu einem Objekt zu messen, sowie
eine Intel RealSense R200 Kamera und einen Quad-Core Intel Atom Prozessor.
Mit der Drone Flight Control Firmware werden die Daten der Kamera und Sensoren kombiniert, um eine 3D-Umgebung zu modellieren. Dies ermöglicht es der Drohne, Hindernisse zu erkennen und alternative Routen zu wählen, wobei sie sich auch an einmal festgestellte Hindernisse erinnert.

am GRASP
Einem Bericht vom September zufolge stellen Fachleute der University
of Pennsylvania (UPenn) einen neu entwickelten Quadrokopter
vor, die tatsächlich praktisch autonom ist. Die Entwicklung aus dem GRASP-Labor
von Prof. Vijay Kumar, die sechs Jahre langwieriger
Arbeiten erfordert hatte, kann aggressive Manöver durchführen, die ausschließlich
Onboard-Sensoren und -Computing verwenden und keiner externen Steuerung
oder Datenübermittlung bedürfen.
Während des Fluges schätzt der Quadrokopter 500 mal pro Sekunde seine Lage und Orientierung im Raum. Es kann Geschwindigkeiten von 4,5 m/s erreichen, bis 1,5 g beschleunigen und in Winkeln von bis zu 90° Grad abrollen. Damit wird auch das eigentliche Ziel erreicht: daß die Kopter durch offene Fenster fliegen können, ohne irgendwo anzuschlagen.
Es wird jedoch noch ein zweiter, radikal unterschiedlicher Ansatz verfolgt, bei dem die kleinen Drohnen als Schutz einen Rollkäfig besitzen, mit dem sie an allem vorbeikommen, was ihnen im Weg steht. Dies wurde im Grunde durch den kardanischen Schutzkäfig des Schweizer Start-Ups Flyability vorweggenommen, das ich bereits in der Übersicht 2015 präsentiert habe (s.d.).
Für ihre Versuche baut die Kumar-Gruppe eine Flotte von 25 g leichten und 10 cm breiten Pico-Quadrokoptern, die jeweils einen leichten, selbstaufrichtenden Rollkäfig aus einem wärmegehärteten Garn besitzen, das aus Karbonfaser-Strähnen besteht. Die winzigen Kopter werden von einem einfachen Controller gesteuert, der weder die Position anderer Roboter oder Hindernisse berücksichtigt, noch spezielle Anweisungen für den Fall einer Kollision hat.
Alles, was der Controller zu tun versucht, ist, die Pico-Kopter so gut wie möglich zu stabilisieren, während er sie auf eine vorgegebene Zielposition zusteuern läßt. Dies funktioniert erstaunlich gut, auch wenn der Roboter keinerlei Kenntnis von Hindernissen oder anderen Pico-Koptern hat, die ihm im Weg sein könnten. Daneben befaßt sich die Kumar-Gruppe noch mit 3D-druckbaren Kleinst-Quadrokoptern und vielen weiteren Drohnen-Projekten.

Als eine ganz besondere technische Leistung wird die Mitte Februar 2016 erfolgte Überquerung
des Ärmelkanals durch einen Quadrokopter gefeiert, die der britische
kommerzielle Drohnenoperator Ocuair durch- und vorführt.
Während die meisten Freizeitfluggeräte eine maximale Flugzeit von 25
Minuten haben, braucht der Enduro 1 Quadrokopter für
die ca. 35 km lange Strecke über den meistbefahrenen Schiffahrtsweg der
Welt 72 Minuten. Dies ist auch der weltweit bislang längste offizielle
Einzelflug eines Quadrokopters.
Gestartet wird an einem Strand in der Nähe von Wissant in Nordfrankreich, und die sichere Landung erfolgt an der Shakespeare Beach im britischen Dover, obwohl die Drohne auf halber Strecke anscheinend das GPS-Signal verliert und daraufhin manuell weitergesteuert werden muß. Begleitet wird der Quadrokopter von seinem Piloten Richard Gill, Operationsleiter bei Ocuair, in einem Boot, das stets in einer Entfernung von 500 m zur Drohne bleibt.
Der erfolgreiche Testflug bedeutet, daß die kleinen Fluggeräte ihre Fahrtstrecken beträchtlich erweitern können – und damit auch die Art und Weise, wie sie verwendet werden. Während des vorbereitenden Tests konnten sogar Flugzeiten über 90 Minuten erreicht und Strecken von mehr als 39 km bewältigt werden.
Im Februar 2016 verbreitet sich die Information, daß
die U.S. Army plant, Drohnen vor Ort mittels 3D-Druckern herzustellen.
Das Projekt ist Teil der so genannten Army Expeditionary Warrior
Experiment, das sich zum Ziel gesetzt hat, neue Technologien
möglichst frühzeitig auch in der Praxis zu erproben.
Die 3D-Drucker sollen vor allem kleineren Trupps helfen, die unter schwierigen Bedingungen außerhalb eines großen Lagers operieren und sich so über Nacht die benötigten UAVs ausdrucken lassen können. Aktuell wird ein erster Prototyp eines solchen Systems entwickelt, der anschließend im Feld getestet werden soll.

Und um bei diesem Thema zu bleiben: Im Mai stellt Airbus auf
der ILA 2016 eine große Drohne namens THOR vor
(Testing High-tech Objectives in Reality), die 4 m lang ist und eine
Spannweite von ebenfalls 4 m hat. Das Ausdrucken der über 1.000 Teile,
die 90 % der Strukturkomponenten bilden, dauert einen Monat, wobei Antrieb
und Steuerung bislang noch nicht ausgedruckt werden können. Der Preis
der Drohne, die wie ein gewaltiges Modellflugzeug aussieht, wird mit
25.000 $ beziffert.
Die Rumpfstruktur von THOR besteht aus unterschiedlichen Bauarten einer Gitterwerkstruktur, die als besonders widerstandsfähig und schadenstolerant gilt. Das ca. 21 kg schwere Entwicklungsmodell aus Kunststoff und Aluminium sei erstmals im November des Vorjahres in Stade gestartet, angetrieben von zwei 1,5 kW Elektromotoren. Dem Chefingenieur Gunnar Haase zufolge fliegt das ferngesteuerte Flugzeug schön und ist sehr stabil. In diesem Jahr sollen damit 18 Flugmissionen durchgeführt werden.
Nachfolgende THOR-Versionen werden derzeit im neuen Zentrum für Angewandte Luftfahrtforschung (ZAL) in Hamburg zusammengebaut, in dem Airbus ein wichtiger Partner und Aktionär ist. Diese Flugzeuge werden ein modulares Design besitzen, das eine größere Flexibilität in der Flugzellen- und Strukturprüfung ermöglicht. Als Beispiel wird die zweite THOR-Version austauschbare Flügel besitzen, einschließlich Konzepten für einen sechseckigen Flügel mit einer Stützstruktur, die aus einer Wabenstruktur abgeleitet ist, einem Aluminiumflügel und einem flexiblen Flügel aus kohlefaserverstärktem Kunststoff.
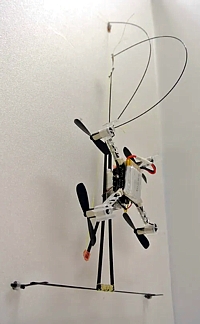
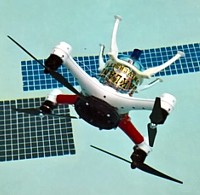
Im März 2016 wird SCAMP (Stanford Climbing
and Aerial Maneuvering Platform) vorgestellt, ein von dem Doktoranden Morgan
Pope am Stanford Biomimetics and Dextrous Manipulation
Lab entwickelter Mechanismus, mit dem sich Drohnen an vertikalen
Flächen niederlassen können, um stunden- und sogar tagelang Daten zu
sammeln oder Kommunikationsaufgaben auszuführen.
Diese Form des Niederlassens kann schwierig sein, und die Wahrscheinlichkeit, daß die Drohne genau an der richtigen Stelle landet, ist gering. Mit der Fähigkeit zu klettern, kann sie ihre Position jedoch genauer bestimmen, was auch dann funktioniert, wenn es für den Flug zu windig ist.
Der SCAMP arbeitet im Freien auf rauhen Oberflächen wie Beton und Stuck und nutzt nur die bordeigenen Sensoren und Berechnungen. Um sich niederzulassen, fliegt er mit dem Heck voran gegen die Wand. Er erkennt die Beschleunigungsspitze beim Aufprall und dreht seine Rotoren auf das Maximum. Der Schwanz dient als Drehpunkt, und der SCAMP hält sich aerodynamisch an der Wand fest, während seine Füße gute Stellen zum Greifen finden.
Sobald dies geschehen ist, schaltet er die Rotoren aus – und indem er dann seine Füße abwechselnd belastet, kann er die Wand hochklettern. Der SCAMP ist damit der erste Roboter, der fliegen, passiv hocken, klettern und auch wieder abheben kann.

Im Juli stellt wiederum der russische Rüstungskonzern UIMC auf
der Industriemesse Innoprom in Jektarinburg eine Drohne vor, die ebenfalls
mit einem 3D-Drucker hergestellt und auch schon auf ihre Flugtauglichkeit
getestet worden sei.
Das Ausdrucken der Drohnenteile würde einen Tag benötigen, anschließend könne die Drohne mit einer Flügelspanne von 2,4 m, einem Gewicht von 4 kg und einer Reichweite von 50 km innerhalb von 15 - 20 Minute zusammengebaut werden. Allerdings kann auch UIMC noch keinen Antrieb ausdrucken, der von einer anderen russischen Firma geliefert wird.
Der Flugzeugkörper ist mit einer Abdeckung für den Propeller versehen, um das Gewicht zu reduzieren und eine bessere Aerodynamik zu ermöglichen. Die Drohne kann verschiedene Kameras und Kommunikationstechniken mit sich führen und für eine Vielzahl von Aufgaben eingesetzt werden. Technische Details über Flugzeit, Reichweite und Nutzlast werden nicht bekanntgegeben.
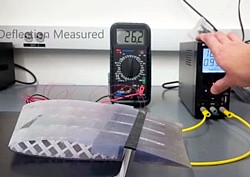
Ende September folgen Berichte über eine 3D-gedruckten ,smarten Flügel’,
mit dem ein Team des Design, Research and Education for Additive Manufacturing
Systems (DREAMS) Lab an der Virginia Polytechnic Institute
and State University (Virginia Tech) den erstmals ausgeschriebenen
nationalen Wettbewerb America Makes Innovation Sprint gewinnt. Das
in Youngstown, Ohio, beheimatete America Makes ist das National Additive
Manufacturing Innovation Institute, Teil des National Center for Defense
Manufacturing and Machining (NCDMM) und Amerikas führendes Institut
für die Unterstützung der 3D-Druckforschung.
Anfang dieses Jahres startet das Institut das Programm Innovation Sprints, das sich auf Themen konzentriert, die zu einer eigenen Entwicklungsstrategie für den 3D-Druck beitragen. Thema des Eröffnungsprogramms sind ,intelligente Strukturen’.
Das Gewinner-Team aus Studenten und Absolventen der Virginia Tech unter der Leitung von Prof. Christopher Williams hatten entsprechend dieser Vorgabe einen 3D-gedruckten, Smart Wing mit integrierten Sensor- und Aktuatorelementen entwickelt, die es dem Flugzeug ermöglichen, sich autonom an die Flugbedingungen anzupassen. Das Flügel-Design bietet vorgefertigte Taschen, welche die eingebetteten Sensoren und Aktoren halten, wobei der 3D-Druckprozeß kurz unterbrochen wird, um sie zu plazieren.
Ziel der Arbeit ist es, die additive Fertigung zu verwenden, um mechatronische Geräte direkt herzustellen – d.h. Produkte, die sich bewegen und alles an Bord haben, um diese Bewegung zu erkennen und zu kontrollieren. Um den bislang erreichten Fortschritt der seit 2011 laufenden Forschung zu demonstrieren, 3D-drucken die Wissenschaftler einen Multimaterialflügel mit einer Flügelklappe, die von den eingebetteten Aktoren und Sensoren angepaßt und gesteuert wird. Gedacht ist der Flügel für ferngesteuerte Flugzeuge.

von Keane
Daß auch ein robuster Quadrokopter mit eingebetteter Elektronik hergestellt
werden kann, belegt der Doktorand Phillip Keane an
der Nanyang Technological University in Singapur,
der im November eine funktionierende, 3D-gedruckte Drohne vorstellt,
der die Elektronik während des Druckprozesses hinzugefügt wurde.
Hergestellt wird die Drohne in Partnerschaft mit der Firma Stratasys Asia Pacific und dem thermoplastischen Harz (ULTEM 9085) des Unternehmens als Druckmedium, das in der Luft- und Raumfahrt für sein hohes Festigkeits-Gewichts-Verhältnis und seine schwere Entflammbarkeit bekannt ist.
Das Fluggerät wird mit Hilfe der Fused Deposition Modeling Technologie erstellt, bei der Objekte schichtweise aus geschmolzenem Material aufgebaut werden, das aus einer Düse extrudiert wird. Der gesamte Bauprozeß dauert rund 14 Stunden, mit drei Pausen, in denen die Elektronik manuell in das Chassis des Kopters eingefügt wird. Eine Herausforderung dabei ist, die Elektronik vor den hohen Temperaturen zu schützen, die während der Ablagerung des Harzes entstehen, weshalb für Bauteile wie die Leiterplatten spezielle hitzebeständige Gehäuse hinzugefügt werden. Motoren und Propeller werden nach Abschluß der Herstellung einmontiert.
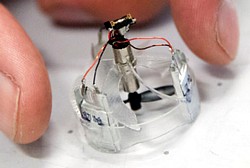
Im gleichen Monat ist zu erfahren, daß auch die aktuell ,kleinste Drohne
der Welt’ aus einem 3D-Drucker stammt. Die Piccolissimo Drohne
stammt von Matthew ,Matt’ Piccoli, einem Doktoranden
im ModLab von Prof. Mark Yims an der University
of Pittsburgh,
das sich auf Roboter spezialisiert hat, die eine möglichst große Bewegungsfreiheit
mit möglichst wenigen Motoren erreichen können.
Piccoli zeigt zwei verschiedenen Größen. Die hier abgebildete kleine Version ist etwa so groß wie ein Zwanzig-Cent-Stück und wiegt 2,5 g, während die zweite Version komplett steuerbar, einen Zentimeter größer sowie zwei Gramm schwerer ist. Beide Versionen sind mit einem 3D-Drucker hergestellt.
Die kleine Drohne besteht aus nur zwei Hauptteilen: Dem Propeller und dem Körper. Dazu kommen der Motor, ein Li-Io-Akku und der Kontrollmechanismus. Der kleine Elektromotor dreht den Körper der Drohne 40 mal die Sekunde in die eine Richtung, während der Propeller etwa 800 mal die Sekunde in die andere Richtung gedreht wird. Gesteuert werden kann die Drohne, weil der Propeller nicht komplett zentriert gelagert ist, so daß im richtigen Moment befohlene Geschwindigkeitsveränderungen der Drohne erlauben, die Richtung ändern.
Im August 2018 erhalten Yims und Piccoli, der inzwischen an der University of Pennsylvania ist, die Guinnes-Urkunde, die ihnen den Weltrekord für die kleinste Drohne bestätigt.
Weiter mit den Elektro- und Solarfluggeräten...